
A panorama combining images from both cameras of the Mastcam on NASA’s Curiosity Mars Rover shows diverse geological textures on Mount Sharp. Three years after landing on Mars, the mission is investigating this layered mountain for evidence about changes in Martian environmental conditions.
Credit: NASA/JPL-Caltech/MSSS
Over last weekend, NASA’s Curiosity rover on Mars was productive, relaying back to Earth loads of data – including up-close inspection of “Ravalli” making use of its Mars Hand Lens Imager (MAHLI).
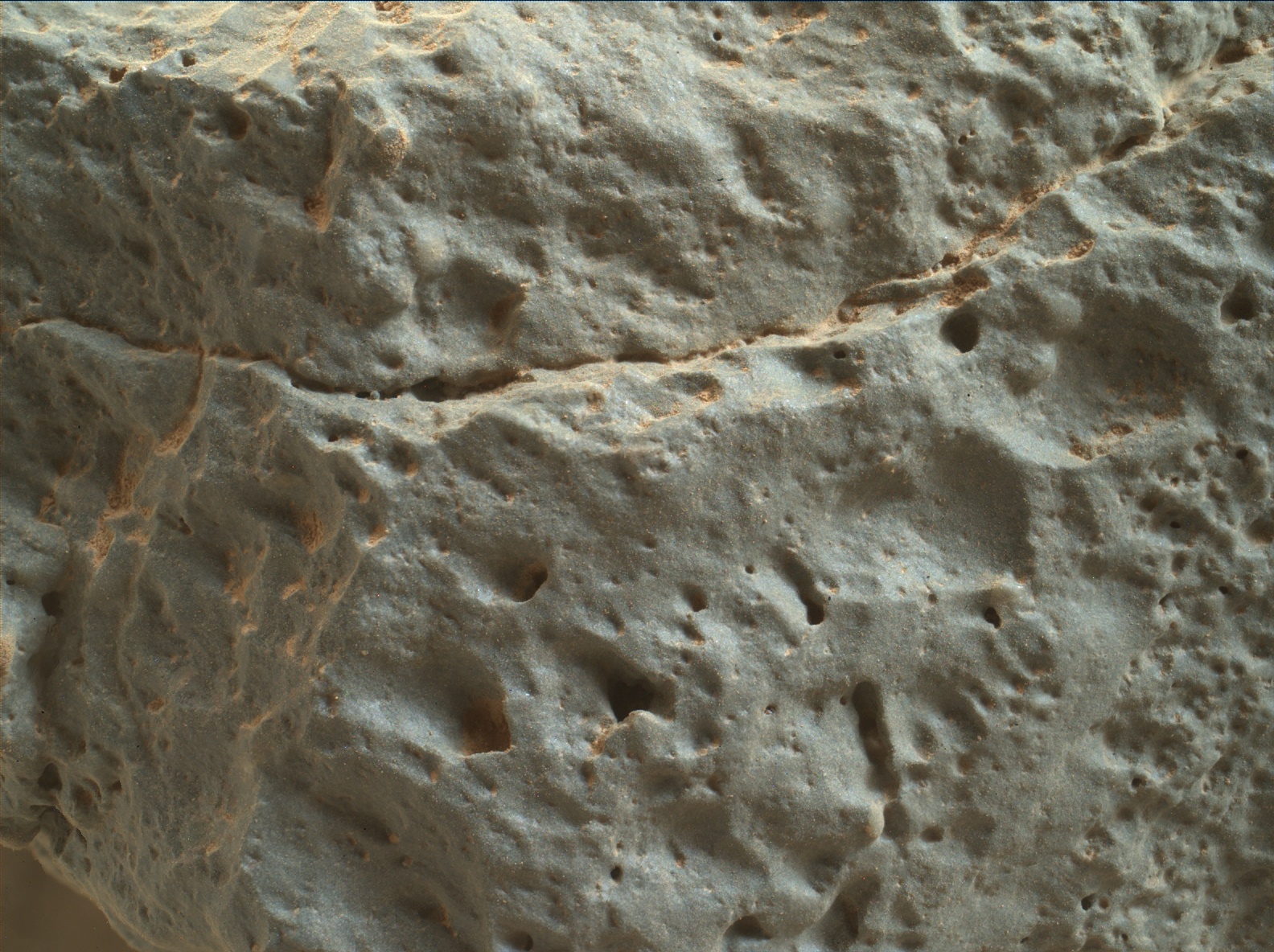
NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on August 23, 2015, Sol 1082.
Credit: NASA/JPL-Caltech/MSSS
Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona reports the robot made a nearly 70-foot (22-meter) drive on Sol 1083. The rover was rolled into place to observe rock outcrops.
Plans call for Chemistry & Camera (ChemCam) observations of two targets: “Tinder Box” and “Gordon.”
Curiosity’s Mast Camera (Mastcam) will acquire mosaics of these targets as well as “Centennial Range” and “Willow Ridge,” Herkenhoff reports.
Path ahead
“There isn’t time/power for much more science, as another drive is planned for Sol 1085,” Herkenhoff adds, with overnight use of the Sample Analysis at Mars (SAM) Instrument Suite.
ChemCam, Mastcam and Navcam will make more atmospheric observations late in the morning of Sol 1086. Also on the books is use of the Rover Environmental Monitoring Station (REMS).
The Little Rover: The circular version of Curiosity’s recent selfie inspired this work by MAHLI’s Megan Kennedy Wu.
Credit: Megan Kennedy Wu
Taking a look at its surroundings, rover images show that “the path ahead is rough,” Herkenhoff observes, “but looks very interesting!”
Curiosity was launched from Earth in November 2011, landing on the Red Planet in August 2012.

