
Curiosity Mars Hand Lens Imager (MAHLI) image taken on July 24, 2016, Sol 1410.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now in Sol 1412.
Last weekend the rover made good progress, driving almost 223 feet (68 meters).
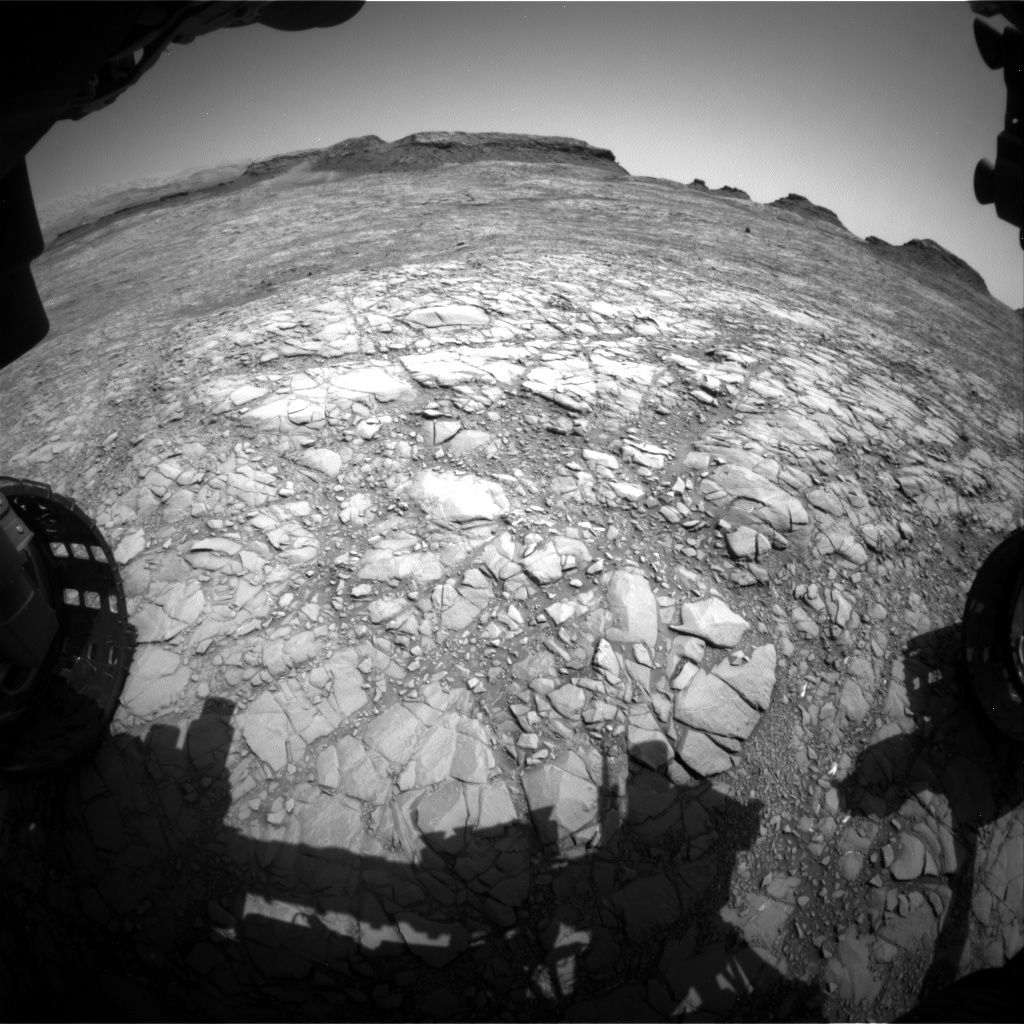
Image taken by Curiosity’s Front Hazcam Left B on Sol 1411, July 25, 2016.
Credit: NASA/JPL-Caltech
Before the drive, Curiosity’s Chemistry and Camera (ChemCam) and Mastcam were to observe bedrock targets “Jamba” and “Huambo” and the Right Mastcam was on tap to acquire a 3-image mosaic of a small depression called “Mungo.”

Curiosity Mars Hand Lens Imager (MAHLI) image taken on July 26, 2016, Sol 1411.
Credit: NASA/JPL-Caltech/MSSS
Atmospheric dustiness
After acquiring the post-drive imaging needed to plan future mobility, ChemCam was slated to use special software to autonomously select a new target for a Laser Induced Breakdown Spectroscopy (LIBS) raster.

Curiosity Mars Hand Lens Imager (MAHLI) image taken on July 26, 2016, Sol 1411.
Credit: NASA/JPL-Caltech/MSSS
According to Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona, the robot’s Navcam was set to search for clouds and dust devils, and its Mastcam would measure the dustiness of the atmosphere. The dust measurements will be repeated at noon and mid-afternoon to look for changes during the day.
Dusty environment of Mars. Curiosity Mastcam Left image taken on Sol 1409, July 24, 2016.
Credit: NASA/JPL-Caltech/MSSS
Also on tap, Curiosity’s Right Mastcam was to acquire a 14-image mosaic of the Murray Buttes.
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

