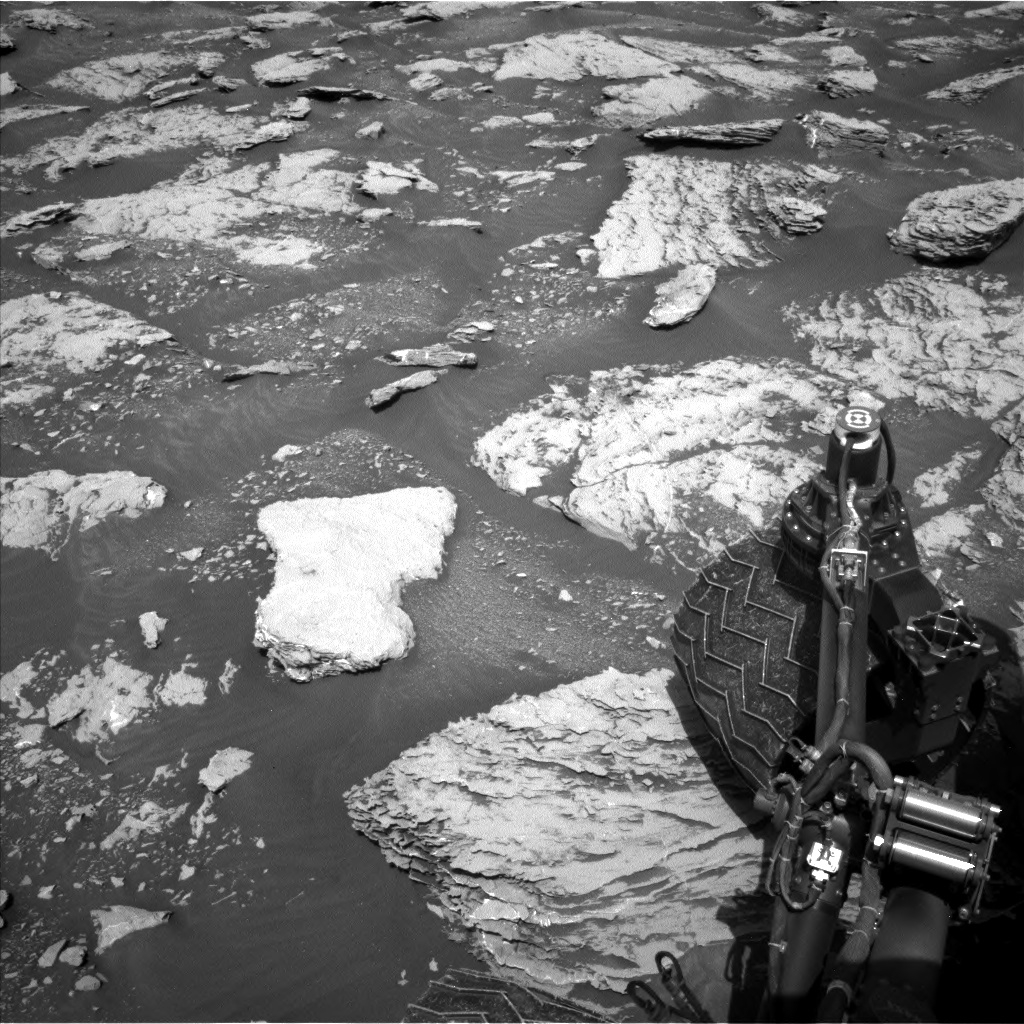
Curiosity Navcam Left B image taken on Sol 2045, May 8, 2018.
Credit: NASA/JPL-Caltech
Mark Salvatore, a planetary geologist at the University of Michigan in Dearborn, reports Curiosity has had a stroke of bad luck. The issue prevented the science team from performing pre-planned rover science.
“About half-way through planning this work, the science team got news that the rover was not only sitting at a rather steep angle, roughly 17 degrees relative to horizontal, but that one of the wheels was also propped up on a loose rock.”

Curiosity Navcam Left B image acquired on Sol 2045, May 8, 2018.
Credit: NASA/JPL-Caltech
In order to play it safe and to minimize any risk that the robot would lose its balance when the arm was extended to perform many of these analyses, Salvatore adds that the rover planners and the science team decided to forego any arm activities.
Unnecessary risks
Instead, the plan now calls for only a short science investigation and to “bump” to a nearby rock to try again for a full surface characterization.

Curiosity Mastcam Left image acquired on Sol 2045, May 8, 2018.
Credit: NASA/JPL-Caltech/MSSS
“While these decisions are momentarily disappointing, they are relatively frequent and necessary to ensure that Curiosity will be able to perform her job many years into the future,” Salvatore explains. “We certainly don’t want to take any unnecessary risks!”
Ridge work
As Curiosity continues to descend the Vera Rubin Ridge (VRR), Salvatore notes that the science team is doing their best to characterize, for a second time, all of the structural, chemical, and spectral variations originally seen as the robot climbed up the ridge.
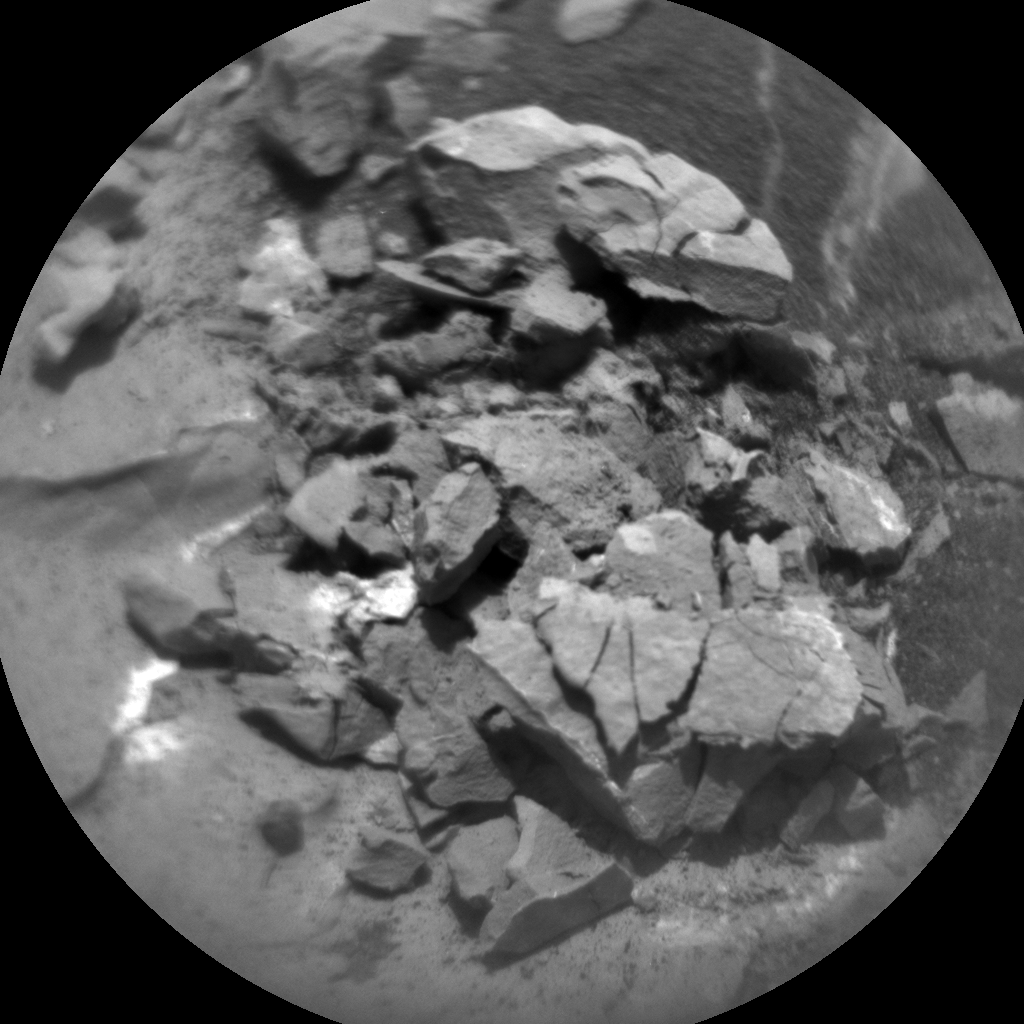
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2046, May 9, 2018.
Credit: NASA/JPL-Caltech/LANL
A recent drive brought Curiosity from the “Pettegrove Point” member of the VRR into the “Blunts Point” member, which is just below the ridge itself.
Drive ahead
Prior to the steep angle issue, the science team was planning to spend a full day at this location to perform remote science investigations, to brush off a rock surface, to analyze the surface’s chemistry, and to take some high-resolution oblique images to characterize the layering observed in the sides of the rocks.
So, instead of the plethora of science activities originally planned, Curiosity will instead only make a handful of measurements before pivoting and driving a few meters away to the next location for a renewed attempt at surface science.
Ground breaking news
New planning had Curiosity using the Chemistry and Camera (ChemCam) instrument’s laser-induced breakdown spectrometer to measure “Grand Lake,” a block of the Blunts Point member that appears to have the typical properties seen earlier in the mission, as well as “Mud Lake,” which is a piece of bedrock broken by Curiosity’s wheels that revealed a bright brick-red color on its inside.
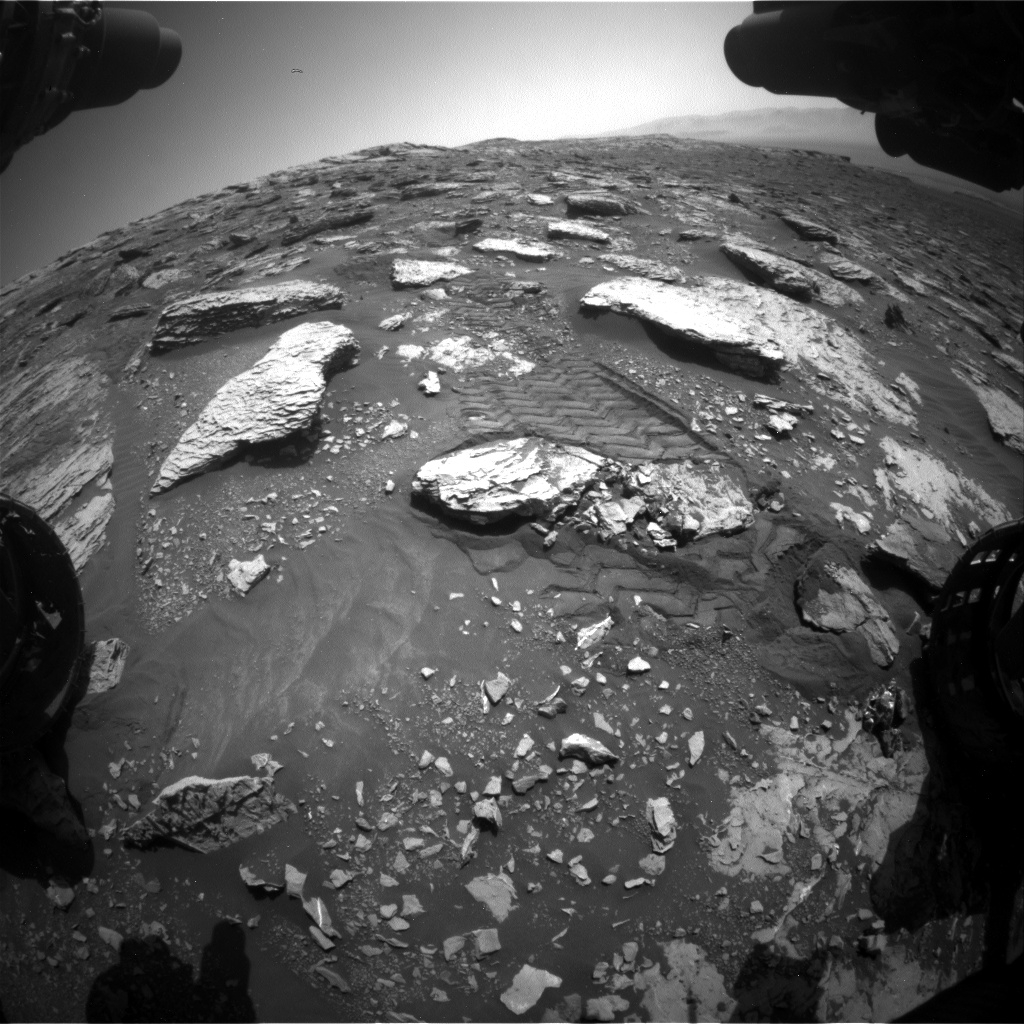
Ground breaking news: Curiosity’s wheels drove over rock, cracking it and revealing a bright brick-red color on its inside. Photo taken by
Front Hazcam Right B Sol 2045 May 8, 2018
Credit: NASA/JPL-Caltech
Salvatore says that the rover’s Mastcam is slated to follow up with documentation images as well as a multispectral image of Mud Lake to see what sort of spectral and mineralogical variations are the cause of the bright red coloration.
Curiosity will also perform several environmental monitoring measurements, including a search for dust devils and an atmospheric opacity observation. Following her short drive, Curiosity will then perform standard post-drive imaging in order to get ready for upcoming surface analyses, Salvatore reports.

