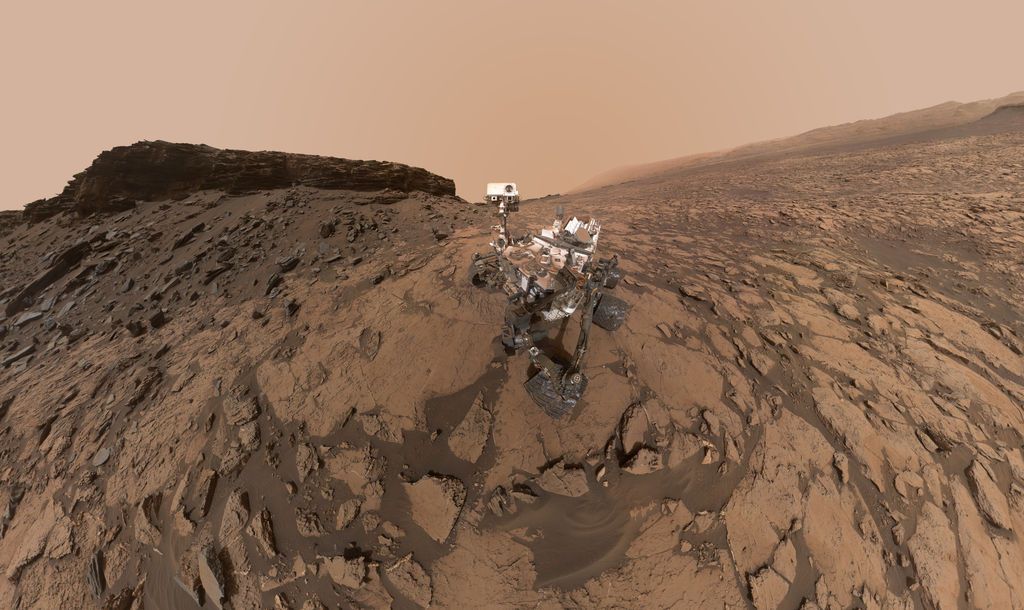
“Butte”-tiful” new self-portrait shows NASA’s Curiosity Mars rover at the “Quela” drilling location in the scenic “Murray Buttes” area on lower Mount Sharp. The panorama was stitched together from multiple images taken by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s arm. The scene combines approximately 60 images
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 1480, the NASA Curiosity Mars rover drove a little over 40 feet (12.5 meters) on Sol 1478, to an area with lots of nodules in the bedrock.
The rover’s tactical planning team decided to exercise the “touch and go” option, so the robot’s arm is deployed for contact science before driving away on Sol 1480.

Curiosity Navcam Left B image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech
Variety of activities
Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona notes that the scheduled plan “is packed with a variety of activities,” starting with a short Alpha Particle X-Ray Spectrometer (APXS) integration and Mars Hand Lens Imager (MAHLI) imaging of a nodule-rich target named “Oodi.”

Curiosity Navcam Left B image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech
Curiosity’s robotic arm is to be moved out of the way for Chemistry & Camera (ChemCam) and Right Mastcam observations of Oodi and nearby bedrock targets “Calenga” and “Caconda.”
Sedimentary structures
In addition, the rover’s Right Mastcam is slated to acquire images of targets dubbed “Chitembo,” “Chingufo,” and “Chipindo” to investigate sedimentary structures in more detail, Herkenhoff adds. Also to be studied is the rock that the Autonomous Exploration for Gathering Increased Science (AEGIS) software, selected for ChemCam chemical measurements.
Herkenhoff notes that the robot’s Mastcam is set to measure dust in the atmosphere before the next drive, followed by the usual post-drive imaging.

Curiosity ChemCam Remote Micro-Imager image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech/LANL
Overnight, the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) is on tap to analyze the Quela drill sample again, “to improve the quality of mineralogical measurements,” Herkenhoff points out.
Battery recharge
On Sol 1481, Curiosity’s Navcam will search for clouds.
AEGIS will autonomously select a target for ChemCam observations, and the results of the CheMin analysis will be read out of the instrument to the rover computer.

Curiosity Navcam Right B image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech
Finally, the rover’s Sample Analysis at Mars (SAM) Instrument Suite “is to perform a maintenance activity before the rover gets some sleep and recharges her batteries in preparation for the next 2-sol plan,” Herkenhoff concludes.
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

