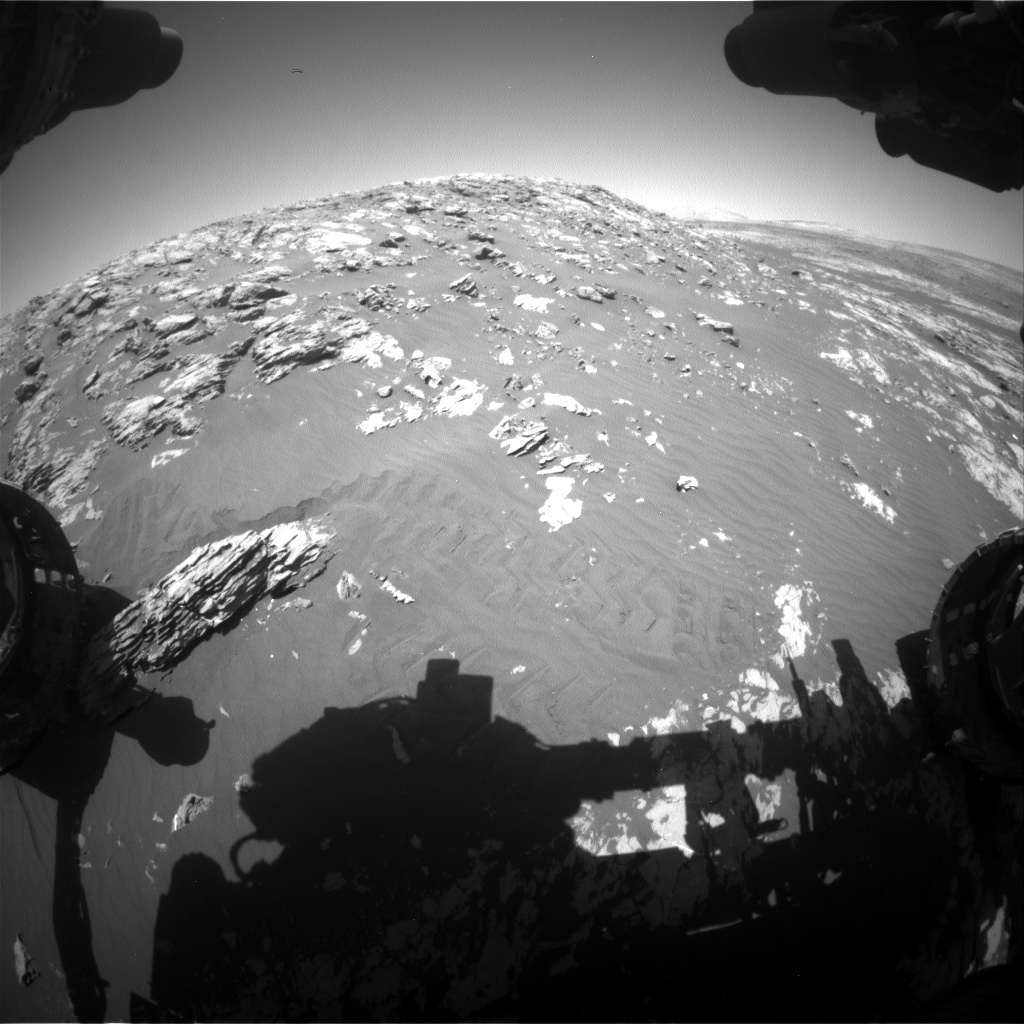
Curiosity Front Hazcam Right B image acquired on Sol 2011, April 3, 2018.
Credit: NASA/JPL-Caltech
“After the weekend drive, the [Curiosity] rover ended up in a spot that was a little too unstable to pass the Slip Risk Assessment Process (SRAP),” reports Ryan Anderson, a planetary geologist at the USGS in Flagstaff, Arizona.
Anderson adds that this means that there is a slight chance that the rover’s footing might shift if the robotic arm is extended, which is not ideal for the safety of Curiosity’s contact science instruments.
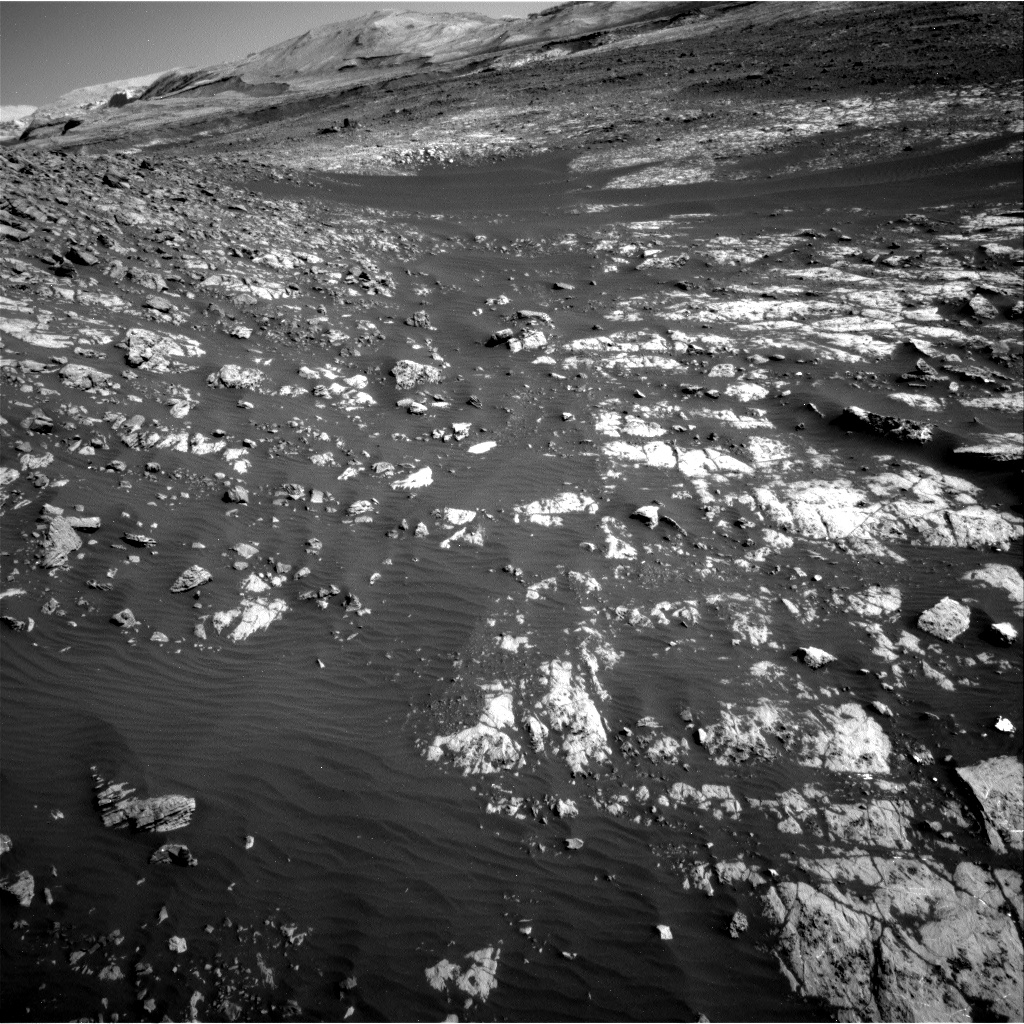
Curiosity Navcam Right B photo taken on Sol 2009, April 1, 2018.
Credit: NASA/JPL-Caltech
Making tracks
The Mars robot is now in Sol 2011 and the plan as scripted makes no use of the rover’s arm and instead focuses on remote sensing. “Take only pictures, leave only wheel tracks,” notes Anderson.
The rover is slated to start off with two Chemistry and Camera (ChemCam) Remote Micro-Imager (RMI) mosaics of the Peace Vallis alluvial fan on the crater floor.
“The air is clear right now, but is expected to get dusty later this season,” Anderson explains, “so it is important to get these very long distance images while we can.”
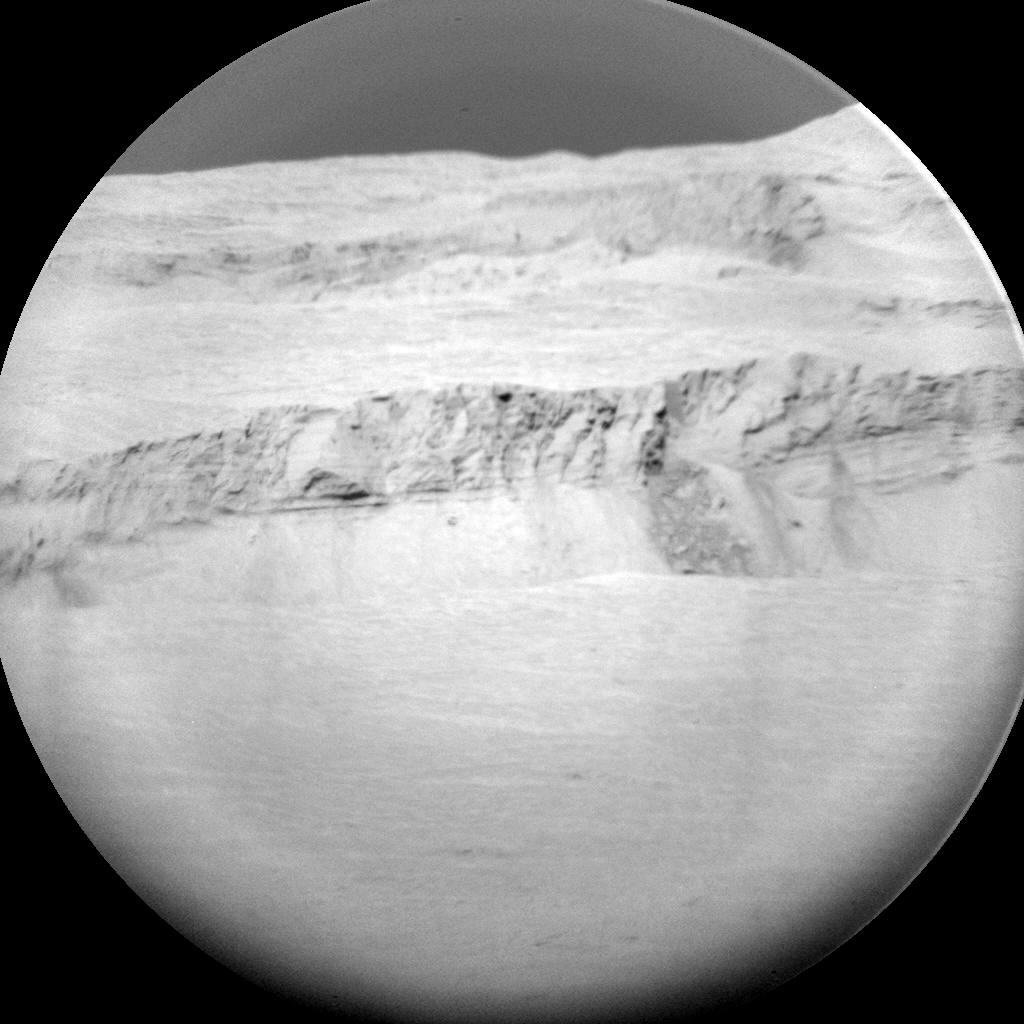
Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 2010, April 2, 2018.
Credit: NASA/JPL-Caltech/LANL
Drive ahead
Next, ChemCam will measure the chemistry of the targets “Morven”, “Insch”, and “Pabay.” The rover’s Mastcam then will take four mosaics: two that cover the three ChemCam targets, and two more looking for changes in the bedrock at other locations. Navcam will then finish up, watching for dust devils and clouds around midday and in the late afternoon.

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2008, April 1, 2018.
Credit: NASA/JPL-Caltech/MSSS
“The plan is to wrap up observations at this location in the Sol 2012 plan and then drive to the southeast,” Anderson concludes.
New traverse map
Meanwhile, a new Curiosity traverse map through Sol 2009 has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2009 Martian day, or sol, of the rover’s mission on Mars (April 02, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
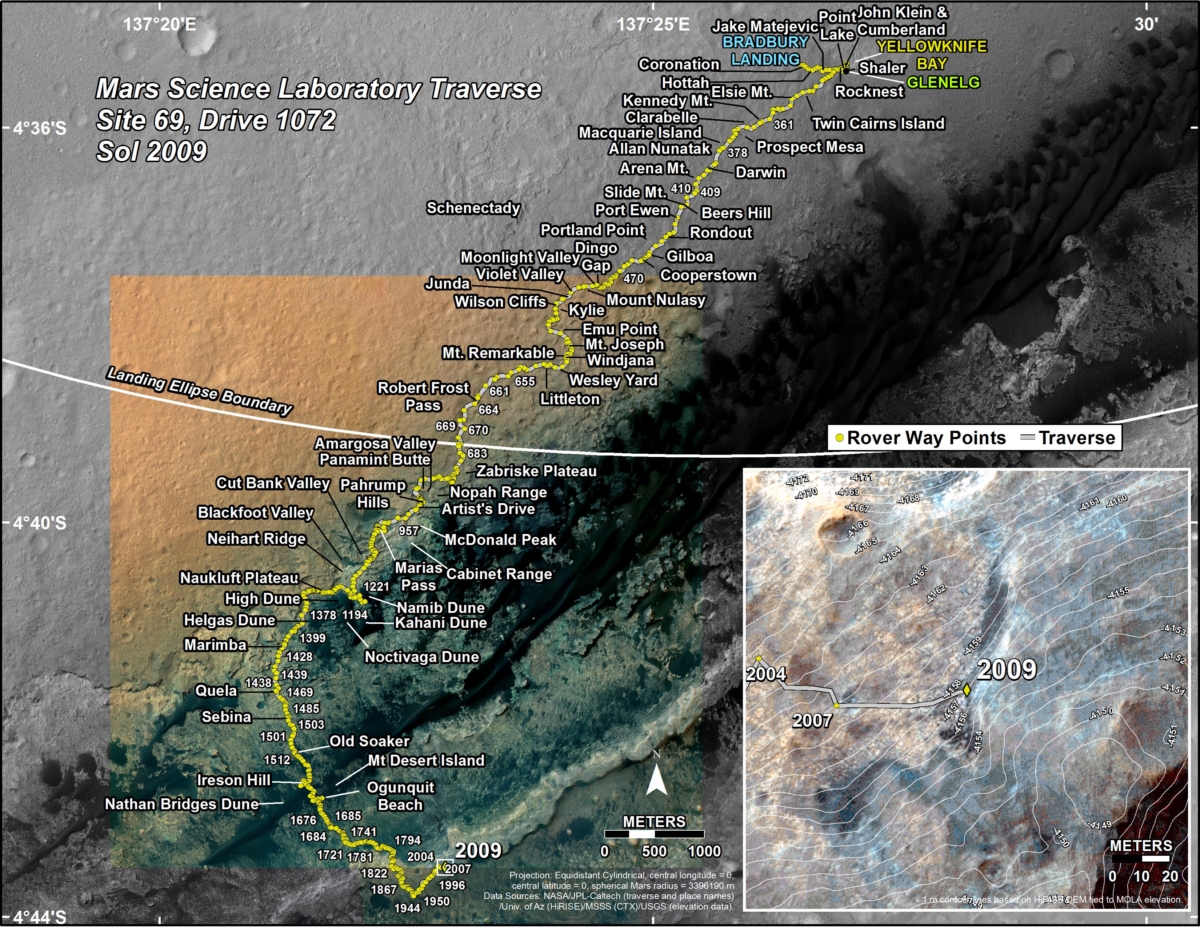
Credit: NASA/JPL-Caltech/Univ. of Arizona
From Sol 2007 to Sol 2009, Curiosity had driven a straight line distance of about 149.72 feet (45.63 meters), bringing the rover’s total odometry for the mission to 11.56 miles (18.61 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

