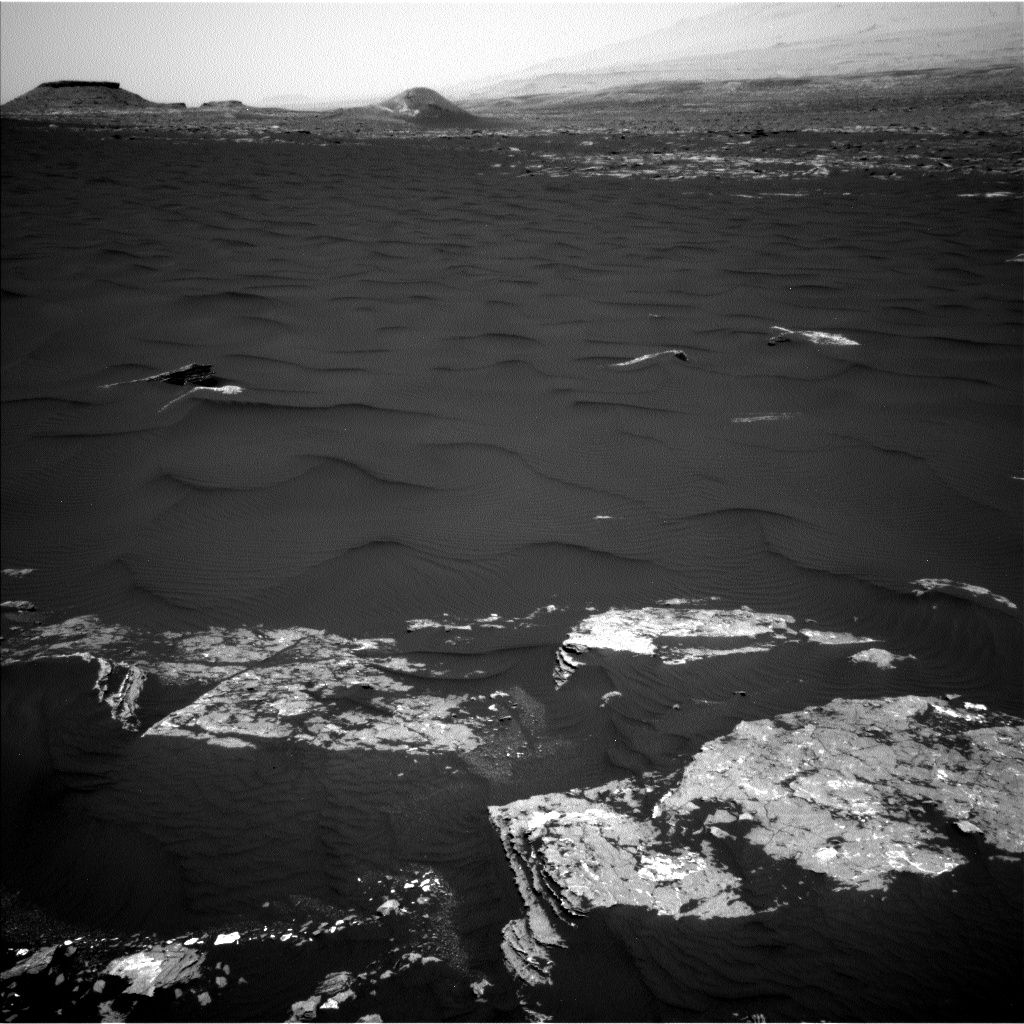
Curiosity Navcam Left B image taken on Sol 1646, March 24, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is busy at work on Sol 1647 after a drive of over 98 feet (30 meters) on Sol 1646.
Over this weekend, the robot is assigned remote sensing and arm work, along with a drive onto the edge of a large dune.
Left middle wheel
A recent traction control test involving Curiosity’s wheels went well, reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.

Two of the raised treads, called grousers, on the left middle wheel of NASA’s Curiosity Mars rover broke during the first quarter of 2017, including the one seen partially detached at the top of the wheel in this image from the Mars Hand Lens Imager (MAHLI) camera on the rover’s arm.
Credit: NASA/JPL-Caltech/MSSS
Traction control comes none too soon as a routine check of the aluminum wheels on the rover has found two small breaks on the Mars machinery’s left middle wheel.
According to experts at the Jet Propulsion Laboratory, builder of Curiosity, new imagery shows signs of worrisome wheel wear and tear.
Grouser grousing
The mission’s first and second breaks in raised treads — called grousers — appeared in a March 19 image check of the wheels, documenting that these breaks occurred after the last check on January 27. The grousers bear much of the rover’s weight and provide most of the traction and ability to traverse over uneven terrain.

Curiosity Mars Hand Lens Imager (MAHLI) image taken on March 19, 2017, Sol 1641.
Credit: NASA/JPL-Caltech/MSSS
“All six wheels have more than enough working lifespan remaining to get the vehicle to all destinations planned for the mission,” said Curiosity Project Manager Jim Erickson at JPL. “While not unexpected, this damage is the first sign that the left middle wheel is nearing a wheel-wear milestone,” he said in a statement.
Testing has shown that at the point when three grousers on a wheel have broken, that wheel has reached about 60 percent of its useful life.
Curiosity Mars Hand Lens Imager (MAHLI) image taken on March 22, 2017, Sol 1644.
Credit: NASA/JPL-Caltech/MSSS
Beach setting
Meanwhile, on Sol 1647, the plan calls for the robot’s Left Mastcam to take a 360-degree panorama and Right Mastcam will acquire a 17×3 mosaic of the edge of the sand dune, which is named “Ogunquit Beach.”
Then the Chemistry & Camera (ChemCam ) and Right Mastcam will observe bedrock targets “Damariscotta Lake,” “Mount Katahdin,” and “Boothbay Harbor.”
Later in the day, the rover’s robotic arm will be unstowed for drill diagnostic tests and a full suite of Mars Hand Lens Imager (MAHLI) images on another bedrock target dubbed “Halftide Ledge.”

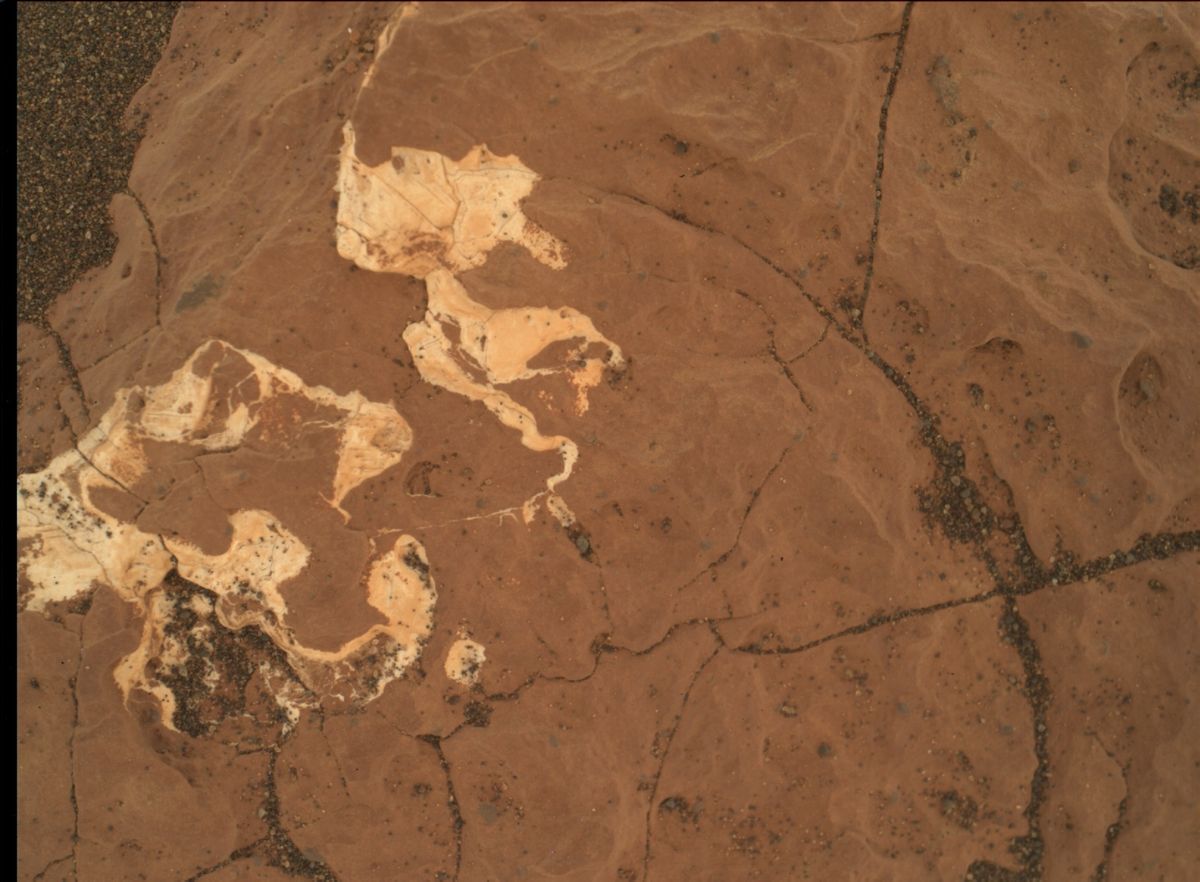
Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1646, March 24, 2017.
Credit: NASA/JPL-Caltech/LANL
Then the Alpha Particle X-Ray Spectrometer (APXS) is slated to be placed on the same target for an overnight integration.
Drive onto the dune
On Sol 1648, the schedule calls for the arm to be stowed after more drill diagnostic tests and Curiosity’s Navcam will search for dust devils while the Rover Environmental Monitoring Station (REMS) acquires environmental data.
According to Herkenhoff, the wheeled robot is set to drive onto the dune. “After the drive, the arm will be unstowed to allow Mastcam and Navcam to acquire stereo images of the arm workspace to support planning next week.”

Curiosity’s traverse map through Sol 1646 – as of March 24, 2017.
From Sol 1645 to Sol 1646, Curiosity has driven a straight line distance of about 97.95 feet (29.86 meters), bringing the rover’s total odometry for the mission to 9.89 miles (15.91 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CalTech/University of Arizona
Early the next morning, Mastcam is set to measure the dust in the atmosphere and Navcam will search for clouds. In the afternoon, Right Mastcam will repeatedly take pictures of three areas near the rover to look for changes due to winds.
In addition, Mastcam will search for dust devils and measure atmospheric dust at two different times of day.
“Finally, the rover will sleep through the night to recharge in preparation for what will likely be a busy week,” Herkenhoff concludes.

