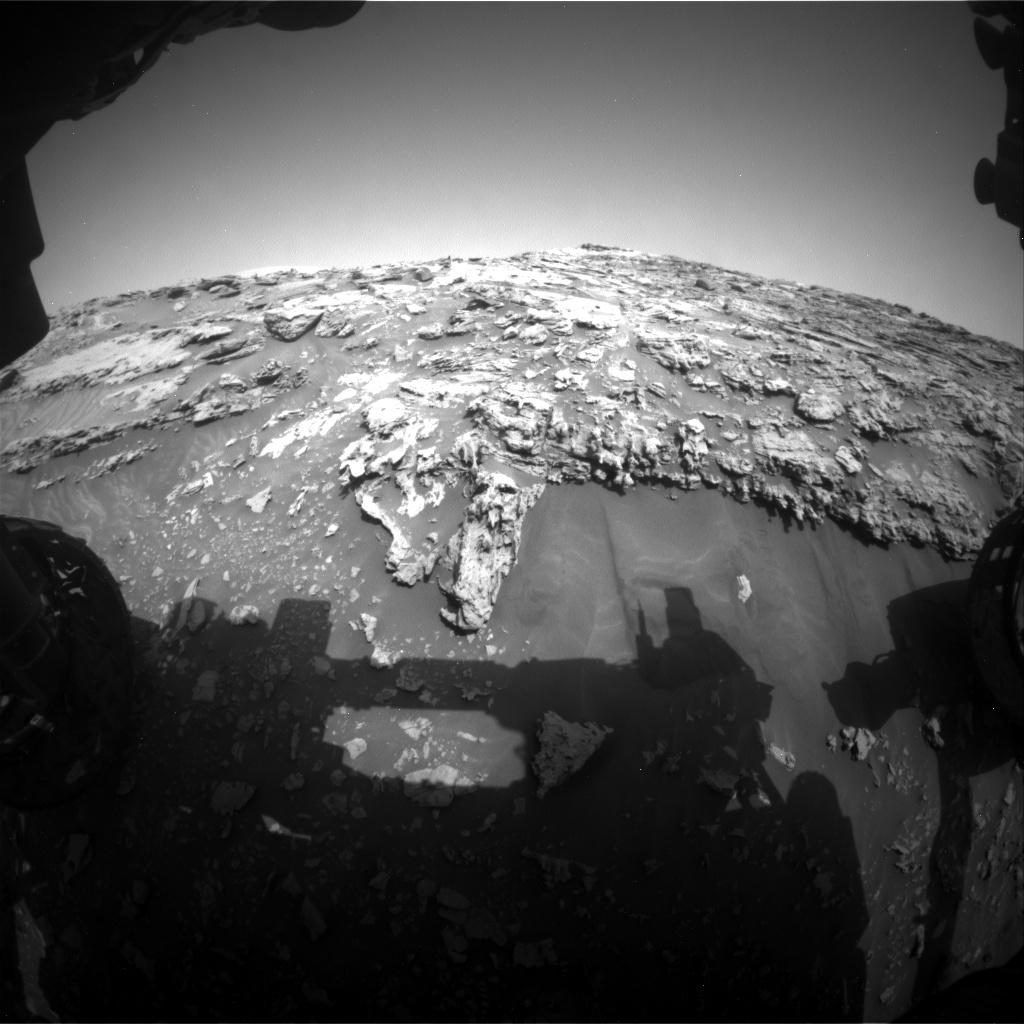
Extreme Tilt! Curiosity Front Hazard Avoidance Camera Left B image acquired Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is wrapping up Sol 2693 duties.
The robot is making progress on its “impressive ascent,” reports Susanne Schwenzer, a planetary geologist at the Open University; Milton Keynes, U.K.
“The planning started with intense discussions on the question of what to do, and for a very good reason,” Schwenzer notes. “The sedimentology experts in the team had determined that we can see very interesting structures related to a possible contact between the Murray and the overlying pediment.”
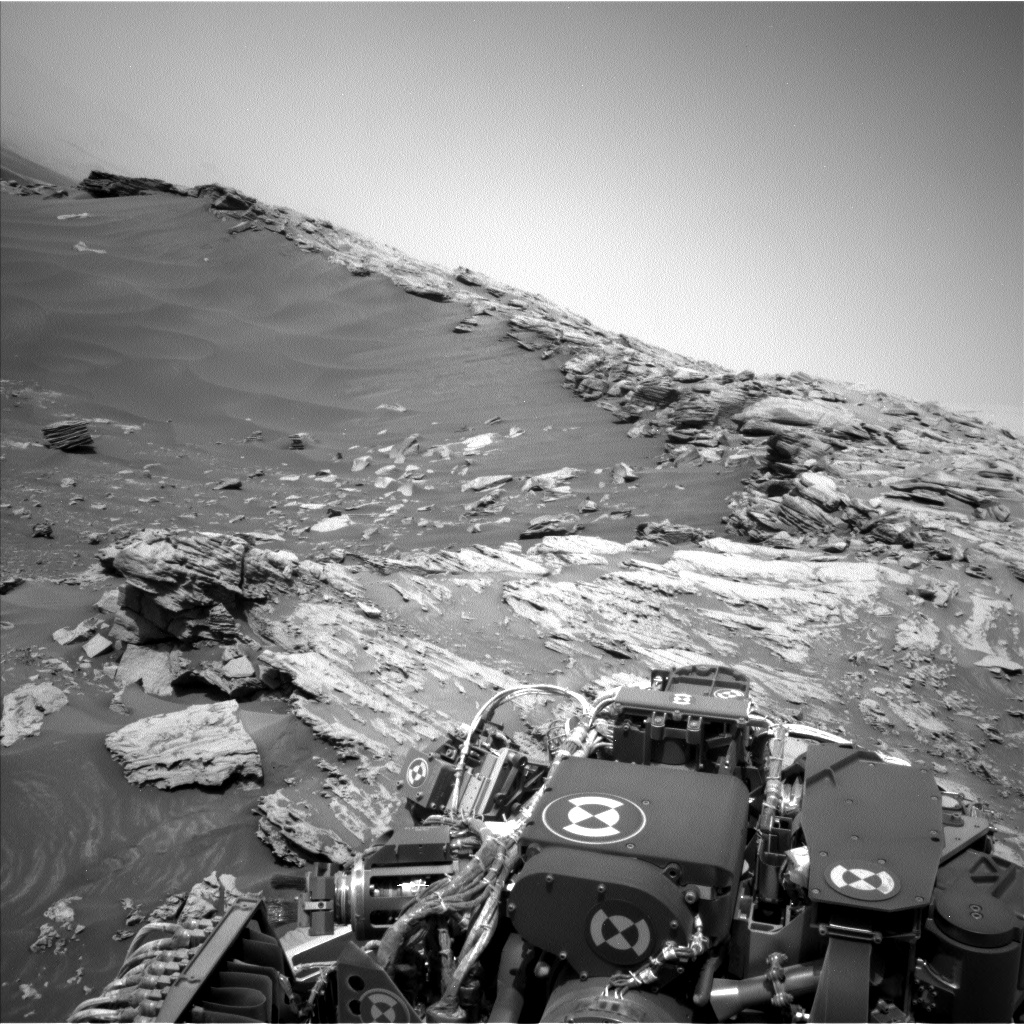
Curiosity Left B Navigation Camera photo acquired Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
Small adjustment
Decisions were made early in planning to possibly collect contact science near the contact, or if the rover should continue its climb to the top.
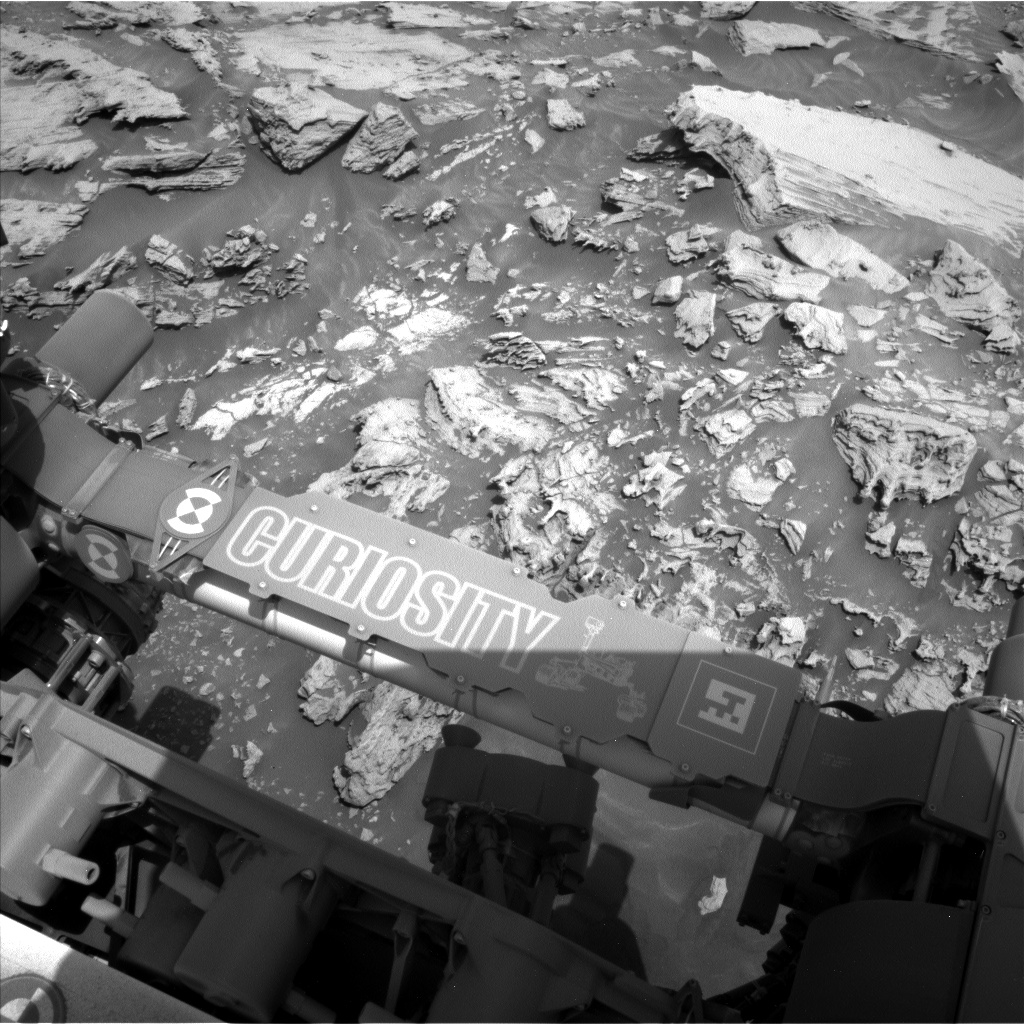
Curiosity Left B Navigation Camera photo acquired Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
“Changing the plan from ‘keep moving’ to ‘stay’ is never taken lightly, and the discussions reflected this as we were weighing options. The reason for the discussion was that we found a site close to the contact that looked much more accessible, detail rich and valuable up close than it had originally looked from the bottom of the hill,” Schwenzer adds.
This justified not driving all the way onto the top of the pediment…and instead doing a small adjustment to allow Mars researchers to do contact science at interesting targets.
“The data we will be acquiring here is getting the team excited!”

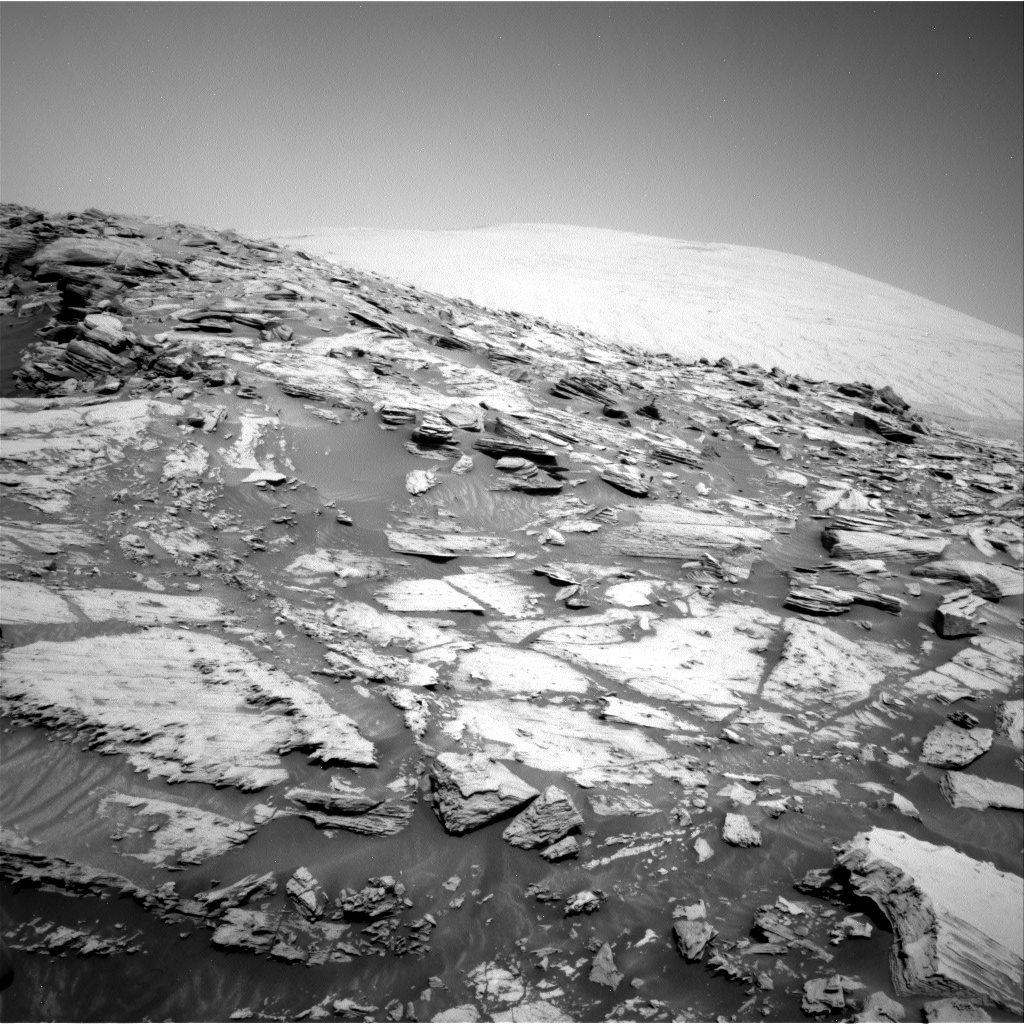
Curiosity Right B Navigation Camera image taken Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
Bedrock targets
A recent plan has the rover scheduled to have two Chemistry and Camera (ChemCam) targets on bedrock: target “Ariundle” is in front of the rover.
The ChemCam target “Hutton’s Section” is higher up on the slope and thus closer to the pediment. “We are expecting to see some differences in chemistry between the two. Mastcam has a mosaic in this plan, which covers the two targets and documents the sedimentary structures around them,” Schwenzer points out.
Challenging terrain
The plan calls for slightly adjusting the rover to prepare for an Alpha Particle X-Ray Spectrometer (APXS) measurement in the area of the Hutton’s Section target.
“The adjustment should get us into a position to where we can reach the target with our arm,” Schwenzer explains. But use of the rover’s robot arm is yet to be seen, because the robot is driving through very challenging terrain.
On the last drive the tilt of the rover exceeded 30 degrees.
“And, of course, that sparked the question if we are now holding the martian rover tilt record. Well, the colleagues who also did operations on the MER rovers reminded us that the MER rover Opportunity still holds the record by a fraction of a degree,” Schwenzer reports.
Curiosity Right B Navigation Camera image taken Sol 2693, March 4, 2020.
Credit: NASA/JPL-Caltech
Tilt record?
The plan also includes further imaging and a ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observation after the drive.
“This will set us up nicely for the next planning, hopefully with some contact science if it can be done safely – and then to continue the climb onto the pediment,” Schwenzer concludes. “Will we break the martian tilt record? The jury is still out – and a big shout of ‘awesome, thank you’ goes to the engineers, who make Curiosity climb as never before!”
In an earlier report, Lucy Thompson, a planetary geologist at University of New Brunswick, notes that Curiosity successfully completed the first drive of the ascent path onto the Greenheugh pediment, and ended up at a 26.7 degree tilt and at the highest elevation so far on Mount Sharp.
Curiosity Left B Navigation Camera photo taken Sol 2692, March 3, 2020.
Credit: NASA/JPL-Caltech

