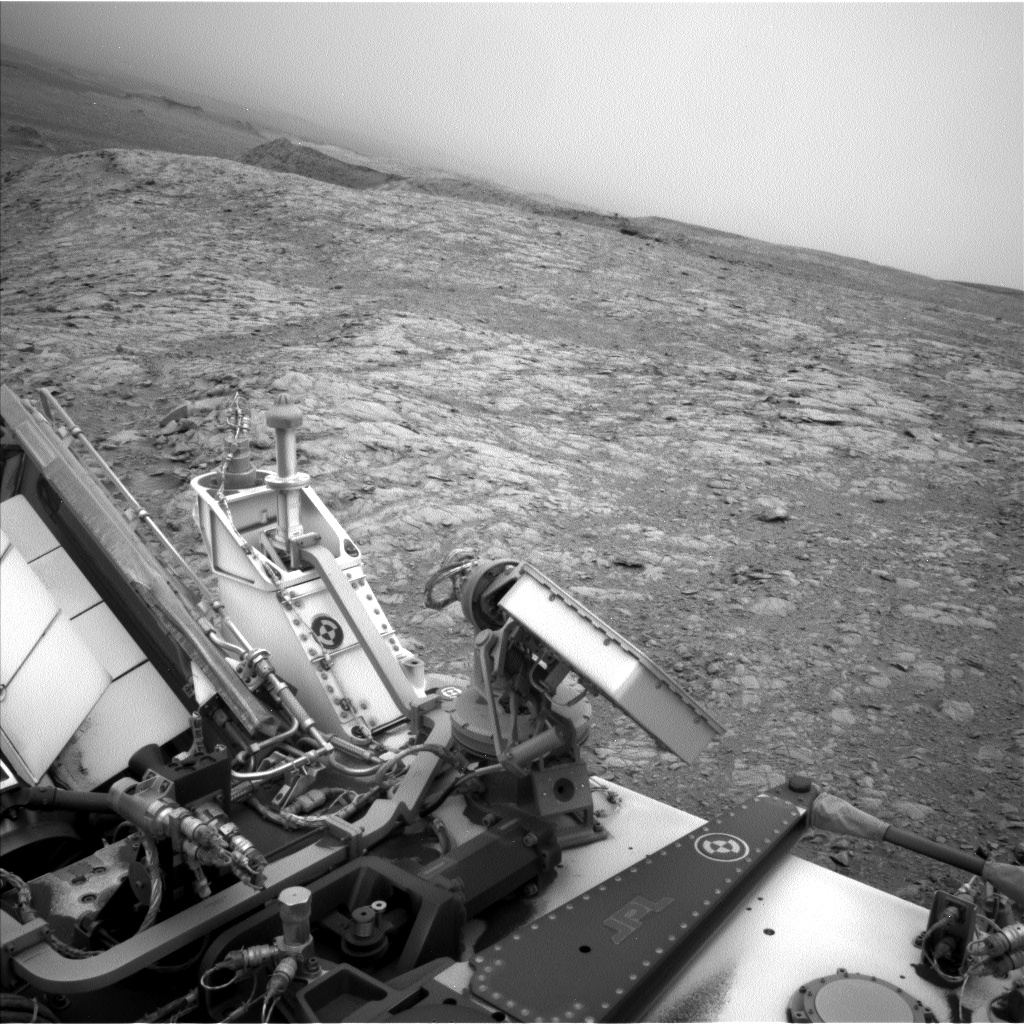
Curiosity Navcam Left B image taken on Sol 2098, July 1, 2018.
Credit: NASA/JPL-Caltech
“Curiosity is back on top of the Vera Rubin Ridge once more, having completed our drive over the weekend as we move toward our next drilling target in the ‘Pettegrove Point’ geological member,” reports Scott Guzewich, an atmospheric scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland.
“After climbing back onto the ridge, there is no lack of interesting bedrock targets nearby and the ground is much smoother and suitable for driving compared to where we’ve been for the last many weeks while we studied our “Duluth” drill hole and its surroundings,” Guzewich adds.
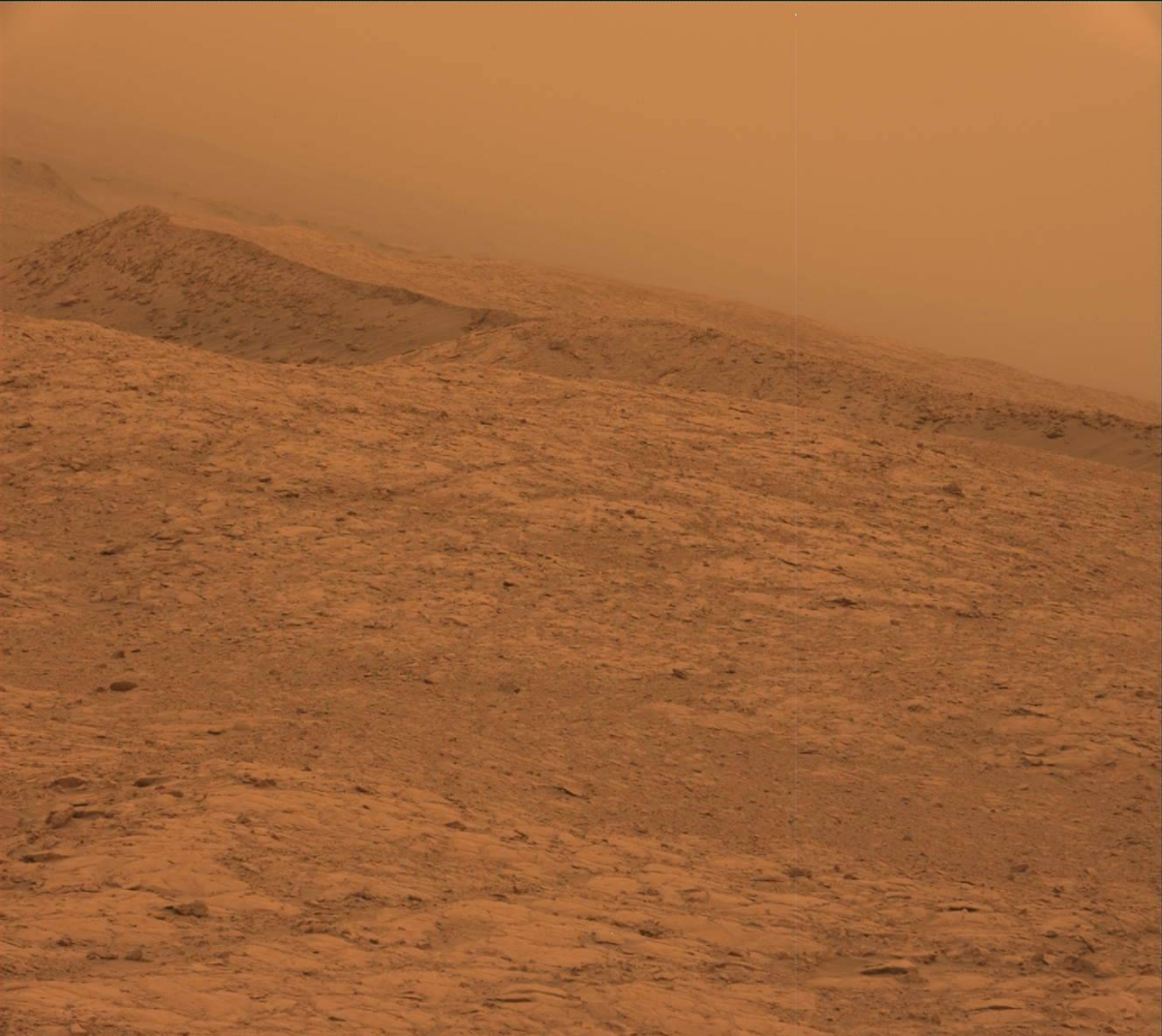
Dust storm
A dust storm campaign continues with a variety of measurements of atmospheric dust opacity (which has continued a very slow decline from a peak about 2 weeks ago).
“We’ve had to alter existing measurement techniques for measuring dust opacity and create new ones to account for the high amounts of dust in the atmosphere and the corresponding low light levels at the surface,” Guzewich explains. “But this also affords us new opportunities to study the properties of dust particles themselves.”

Curiosity Mastcam Left photo acquired on Sol 2098, July 1, 2018.
Credit: NASA/JPL-Caltech/MSSS
Slippage
In an earlier report, Christopher Edwards, a planetary geologist at Northern Arizona University in Flagstaff, Arizona, noted that Curiosity was facing uphill challenges.
“Curiosity stopped its drive a bit earlier than anticipated. It so happens that the autonomous software onboard Curiosity designed to keep it driving safely kicked in and ended the drive short of the planned distance,” Edwards notes.
Setback to science
“When things like this happen, it’s a bit of a setback to science, but keeping the rover safe is priority number one,” Edwards adds.
Not only did the drive stop short, but Curiosity actually ended up in a location where there wasn’t a good surface model, Edwards remarks, triggering the Slip Risk Assessment Process (SRAP) to fail.
A failed SRAP means that Curiosity cannot safely carry out any arm-based activities, so the science team resorted to remote sensing activities using the cameras and the Chemistry and Camera (ChemCam) instrument to continue to assess the Vera Rubin Ridge.
Curiosity Mastcam Left photo acquired on Sol 2098, July 1, 2018.
Credit: NASA/JPL-Caltech/MSSS
Remote sensing activities
In a newly drafted three sol plan, Curiosity will first carry out a host of remote sensing activities including five ChemCam activities, Mastcam documentation images of the ChemCam locations and a small Mastcam mosaic of a layered rock outcrop on the horizon, Edwards explains.
On the second sol, the rover will make good progress driving along the previously planned path using only the existing terrain surface model that is available.
The usual suite of post-drive imaging to help decide science targets in the next plan will also be acquired.
Priority monitoring
“Importantly, as the dust storm on Mars continues to affect Curiosity, activities designed to monitor the amount of dust in the atmosphere will remain a priority and be made as frequently as possible,” Edwards concludes.


Hi Leonard
Nice article on Curiosity. We have had some issues with exposure levels for the cameras due to the storm.
By the way, regarding another story of yours about trying to recover meteorites from the ocean, this was done in 1869, Angra Dos Reis which was observed to fall in the ocean from the beach in Brazil!
Horton (Institute of Meteoritics, Univ. of New Mexico)