
Curiosity Front Hazcam Left B image taken on Sol 1572, January 7, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is presently working in Sol 1572 mode, driving roughly 55 feet (17 meters) on the previous sol.
The robot is now at a location with bedrock outcrops in its robotic arm workspace, explains Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Wind sensor booms
The weekend plan for Curiosity “includes lots of arm work as well as remote observations,” reports Herkenhoff.
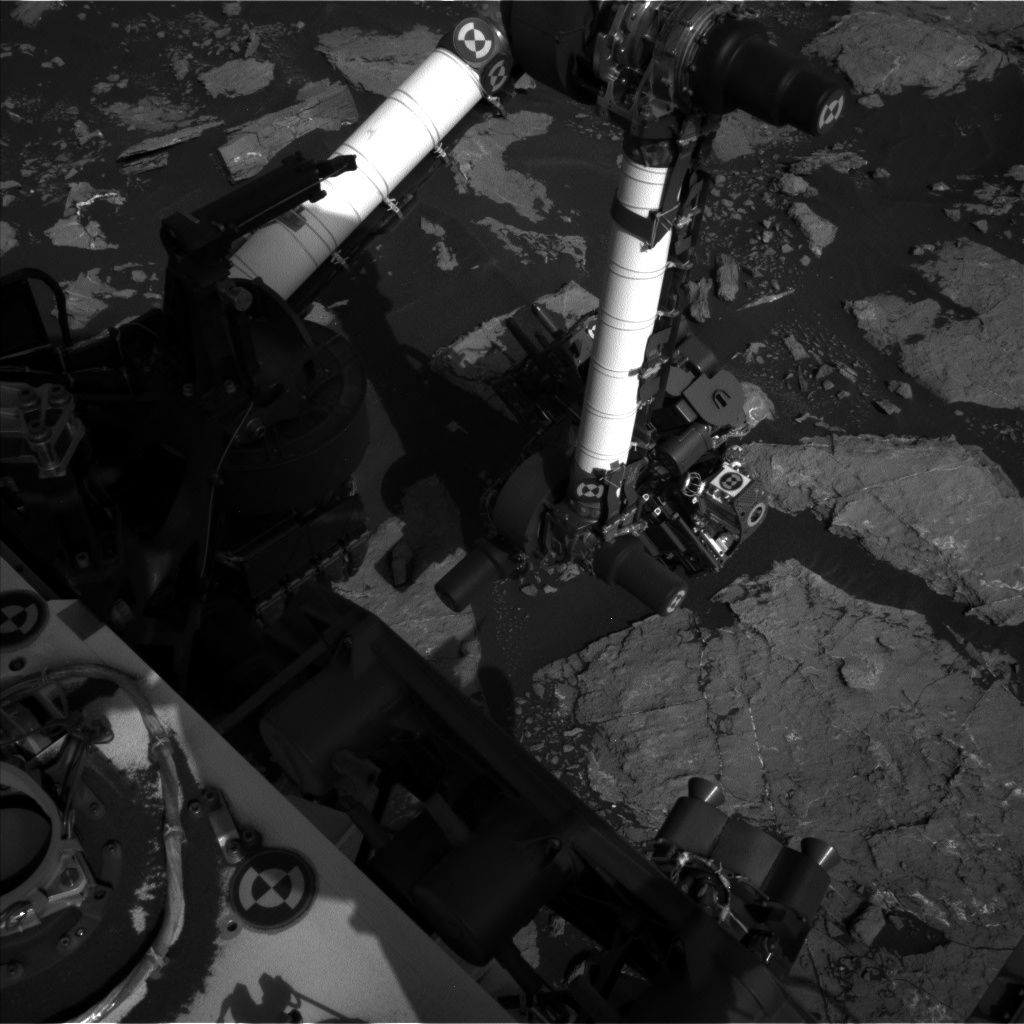
That plan for Sol 1572 includes use of the Mars Hand Lens Imager (MAHLI) to take images of the Rover Environmental Monitoring Station (REMS) booms to diagnose recent problems with the rover’s wind sensors.

Self-inspection of wind sensor booms. Curiosity took this Mars Hand Lens Imager (MAHLI) image on Sol 1572, January 7, 2017.
MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
“Some of the wind sensors on one boom have not functioned since landing, and sensors on the other boom have been acting up lately,” Herkenhoff notes. Later on the schedule is for MAHLI imagery to be taken of a yellow/red color boundary at “Greenstone” and a full suite of images of a yellow bedrock target named “Isle Au Haut.”
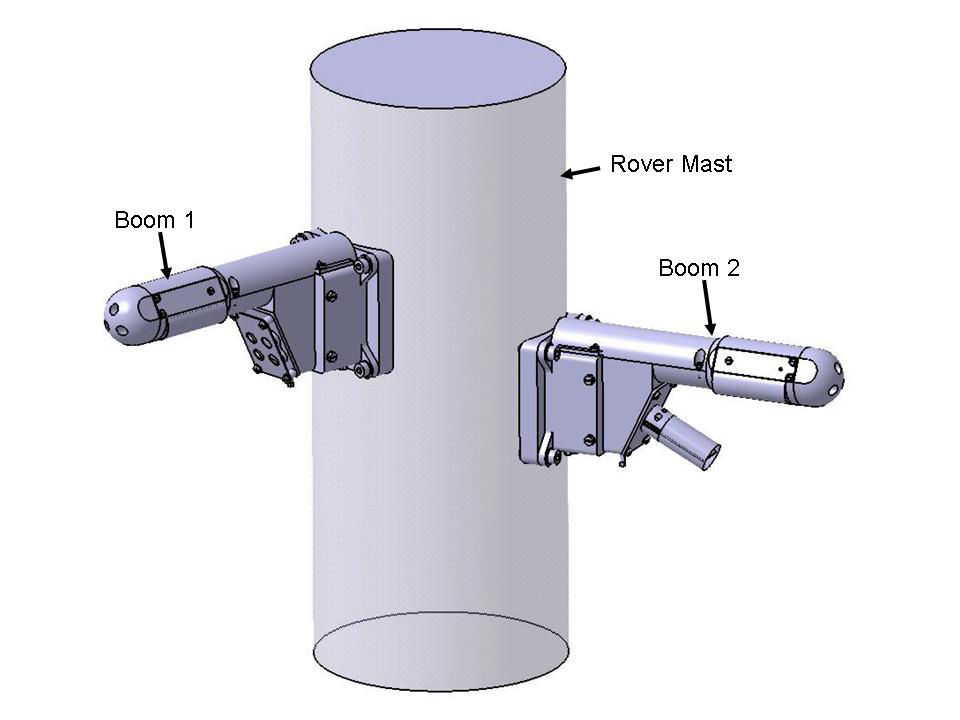
Two small booms on the rover mast record the horizontal and vertical components of wind speed to characterize air flow near the Martian surface from breezes, dust devils, and dust storms.
Credit: NASA/JPL-Caltech/INTA (Instituto Nacional de Tecnica Aeroespacial)
The Alpha Particle X-Ray Spectrometer (APXS) device is then to be placed on Isle Au Haut for an overnight integration.
Dust measurements
Early on the morning of Sol 1573, the scripted plan is to use the rover’s Navcam to search for clouds and Mastcam is to measure the amount of dust in the air by imaging the Sun and the distant crater rim.
“These dust measurements will be repeated at two other times of day later that sol,” Herkenhoff adds.
Later on that sol morning, the Chemistry & Camera (ChemCam) is slated to acquire passive — no laser — observations of its calibration target.
Drill diagnostics
Then the rover’s robot arm is to tasked again to perform new diagnostic tests of the drill feed mechanism, “to help us understand whether the drill feed stall is more sensitive to rotary-only or percussive drilling,” Herkenhoff reports.
“The test data acquired to date indicate an intermittent problem with the internal brake within the motor that feeds the drill forward and backward relative to the rest of the turret,” he explains. “Fortunately, we are able to do everything except drilling while the investigation continues.”
Curiosity Navcam Left B image taken on Sol 1572, January 7, 2017.
Credit: NASA/JPL-Caltech
The team has decided not to try again to drill at Precipice, and to continue driving up the flank of Aeolis Mons – “Mount Sharp”.
Herkenhoff says that after the drill tests, ChemCam will perform some more calibration activities, and acquire laser-induced breakdown spectroscopy (LIBS) data on Greenstone and a bedrock exposure called “Birch Harbor Mountain.”
On tap following that activity is for the rover’s Right Mastcam to image these targets and bright vein targets dubbed “Tarrantine” and “Flying Mountain.”
Drive ahead
On Sol 1574, ChemCam and the rover’s Right Mastcam are scheduled to observe Isle Au Haut before the rover drives away.

Curiosity Mastcam Left image taken on Sol 1571, January 6, 2017.
Credit: NASA/JPL-Caltech/MSSS
After wheeling away, the Curiosity’s arm will be unstowed and the robot’s Navcam will take a stereo pair of images of the arm workspace to prepare for possible contact science on Sol 1575.
Herkenhoff concludes: “It will be another busy weekend for our intrepid rover!”
As always, planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

