
Laser-Induced Breakdown Spectrometer (LIBS) uses laser pulses to study sand scarp. Curiosity Mars Hand Lens Imager (MAHLI) took this image on February 2, 2016, Sol 1241
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover remains parked at Namib dune.
While troubleshooting continues on the Collection and Handling for Interior Martian Rock Analysis (CHIMRA) anomaly, the rover’s robotic arm has been cleared for use.
In a few hours of this posting, the Mars robot will slip into Sol 1242.
Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff reports that science investigations in this area are nearly completed
Plans are in work, Edgar says, to make use of the Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, to supplement Curiosity’s previously acquired selfie.
Also on tap are taking long-distance Chemistry & Camera (ChemCam) Remote Micro-Imager (RMI) mosaics to study layering on Mt. Sharp and the northern crater rim.
Ripple target
Previously, the rover had scuffed the edge of Namib Dune and collected scoops of sand from that dune. Curiosity’s examination of active sand dunes is the first ever done up close other than on Earth.
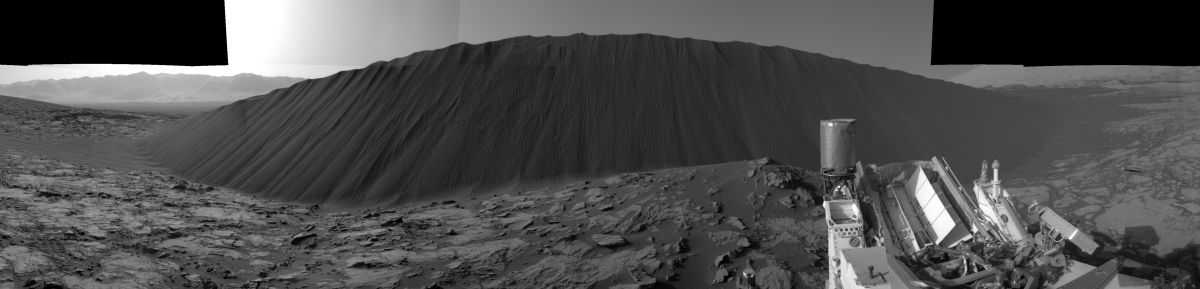
This view from NASA’s Curiosity Mars Rover shows the downwind side of “Namib Dune,” which stands about 13 feet (4 meters) high.
Credit: NASA/JPL-Caltech
Information gleaned from this research provides knowledge regarding active dune processes in conditions with much less atmosphere and less gravity than on Earth.
In other upcoming rover work, “we’ll also acquire a Mastcam image to document the target “Erongo,” and use Navcam to search for dust devils and monitor the atmosphere,” Edgar adds. “Then we’ll use MAHLI to document several of the scoop and dump locations.”
On the morning of Sol 1242, Mastcam and Navcam will image the ripple target “Epupa” under favorable morning illumination conditions, Edgar notes.
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

