
Robot swarm can carry out self-organizing exploration tasks.
Credit: Ferrante et al.
Given the wide variety of scientific zones of interest on the Moon, Mars and other worlds, future use of “robot swarms” may carve up exploration duties.
Work by a research team has been captured in a recently published paper: “Evolution of Self-Organized Task Specialization in Robot Swarms.”
Division of labor is ever-present in biological systems, the researchers point out, as evidenced by various forms of complex task specialization seen in both animal societies and multi-cellular organisms.
Recently, evolutionary swarm robotics has emerged as a test bed to study the evolution of coordinated group-level behavior, the team observes.
The work has been led by Eliseo Ferrante, Edgar Duéñez-Guzmán, Tom Wenseleers at the Laboratory of Socio-Ecology and Social Evolution, Zoological Institute, KU Leuven, Leuven, Belgium. Additional researchers are Ali Emre Turgut of the Mechanical Engineering Department, Middle East Technical University, Ankara, Turkey and Marco Dorigo of IRIDIA–CoDE, Université Libre de Bruxelles, Brussels, Belgium.
Task partitioning
The investigative team reports that, for the first time, they have studied the evolutionary origin of behavioral task specialization among groups of identical robots. The scenario investigated involves an advanced form of division of labor, common in insect societies and known as “task partitioning,” whereby two sets of tasks have to be carried out in sequence by different individuals.
“One of the unsolved mysteries in biology is how a blind process of Darwinian selection could have led to such highly complex forms of sociality,” they explain in the research paper published by PLOS — Public Library of Science — a nonprofit publisher and advocate of open access research.
Credit: Ferrante et al.
Inspired by ants
Their experimental setup was inspired by the type of task partitioning observed in Atta leafcutter ants that collect leaves and other plant material as a substrate for a fungus that is farmed as food.
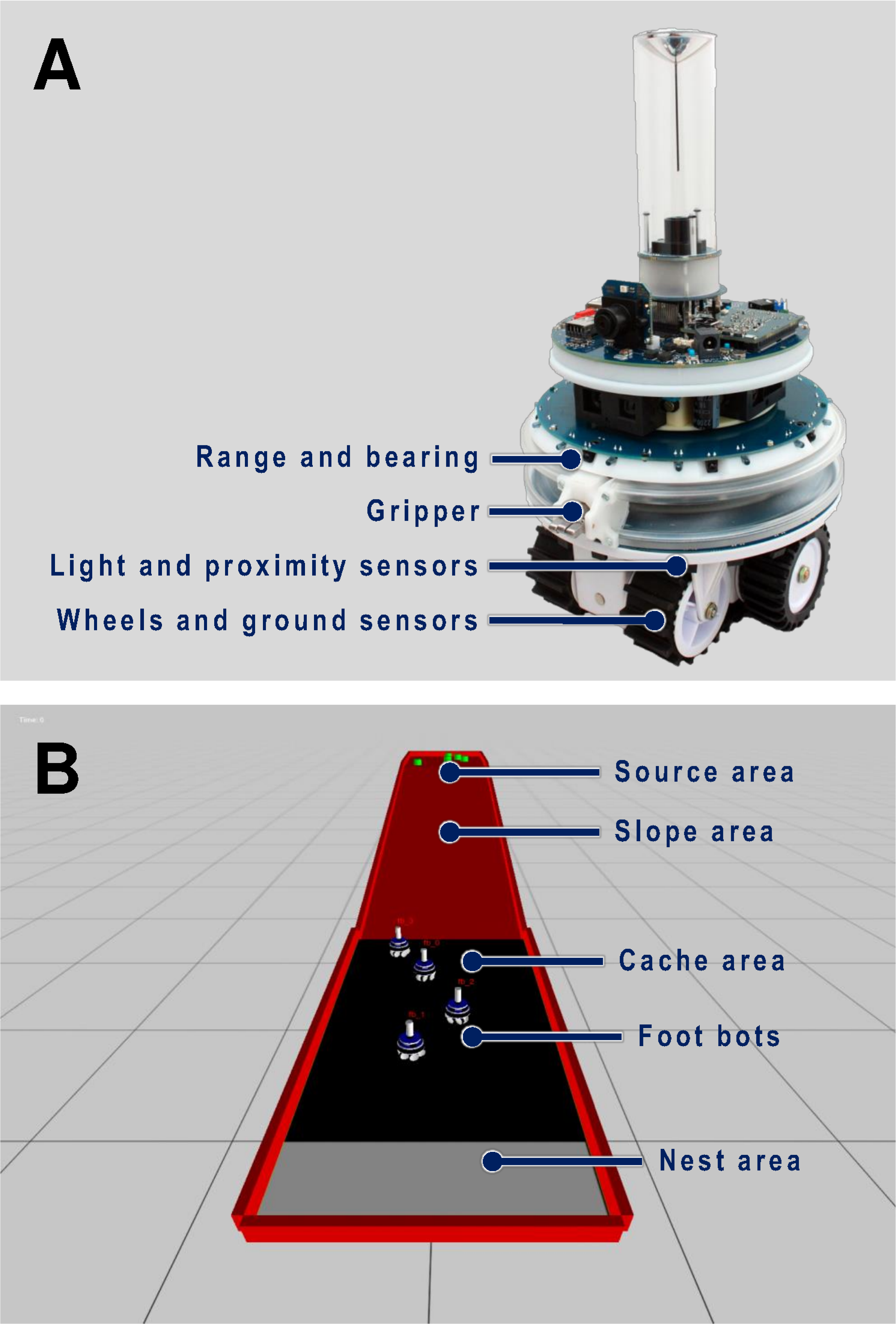
In a first set of experiments, “dropper,” “collector,” and “generalist” foraging strategies were implemented:
— Dropper strategy: A dropper robot is a robot that climbs the slope area and never descends it again, continuously collecting items from the source area and dropping them to the slope area.
— Collector strategy: A collector robot is a robot that never climbs the slope area. Instead, it continuously collects items from the cache (when present) and brings them back to the nest. If it cannot find any items, the collector robot keeps exploring the cache area by performing random walk, until an item is found.
— Generalist strategy: A generalist robot is a robot that performs a standard foraging task. It climbs the slope and explores the source area, collects items, and brings them all the way back to the nest. The generalist robot does not explore the cache area, but in case it finds an item at the cache while going towards the source, it collects it and brings it back to the nest.
Note: Ferrante tells Inside Outer Space: “In the second set of experiments, it was shown that those strategies (above) do not need to be available a priori in order to evolve task specialization. In fact, this has been the first time that both task allocation and the capability to carry out the individual tasks evolved together.”
Teams of robots
From an engineering perspective, Ferrante and colleagues report, “our nature-inspired evolutionary method of Grammatical Evolution clearly has significant potential as a method for the automated design of adaptively behaving teams of robots.”
For more information on this research, go to:
http://journals.plos.org/ploscompbiol/article?id=10.1371/journal.pcbi.1004273

