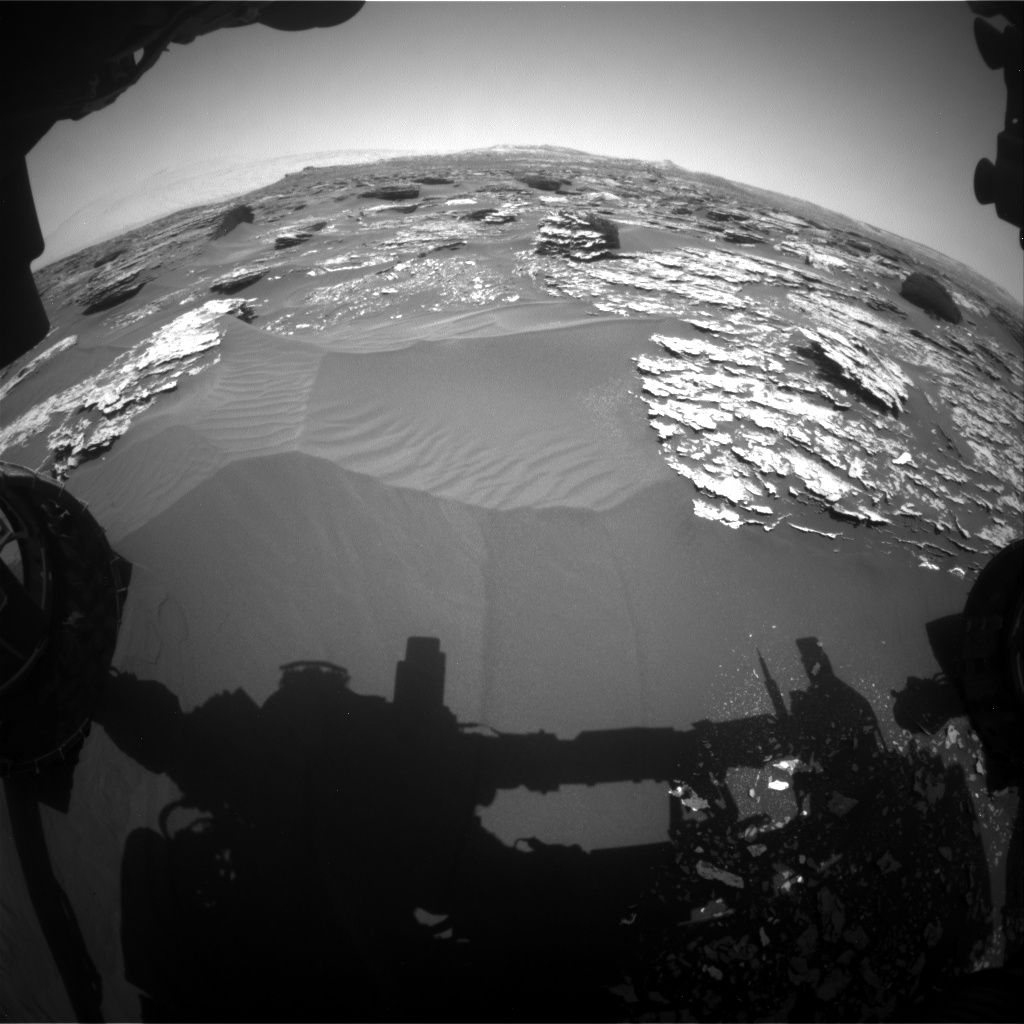
Curiosity Front Hazcam Left B image acquired on Sol 1703, May 21, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover has just begun Sol 1705 duties.
Abigail Fraeman, a planetary geologist at NASA Jet Propulsion Laboratory (JPL) in Pasadena, California reports that Curiosity is continuing to make progress towards Vera Rubin Ridge along the Mt. Sharp ascent route.
In the planning of two sols — Sol 1705 and Sol 1706 – the script calls for remote sensing science on the bedrock in front of the robot, including Chemistry and Camera (ChemCam) observations of targets: “Turtle Island,” “Stony Brook,” and “Dike Peak.”
Fracture fills
“Turtle Island is typical Murray bedrock, Stony Brook has an interesting dark streak running through it, and Dike Peak is a neat looking block with dark colored fracture fills,” Fraeman notes. “We will complement these observations with Mastcam documentation imaging.”
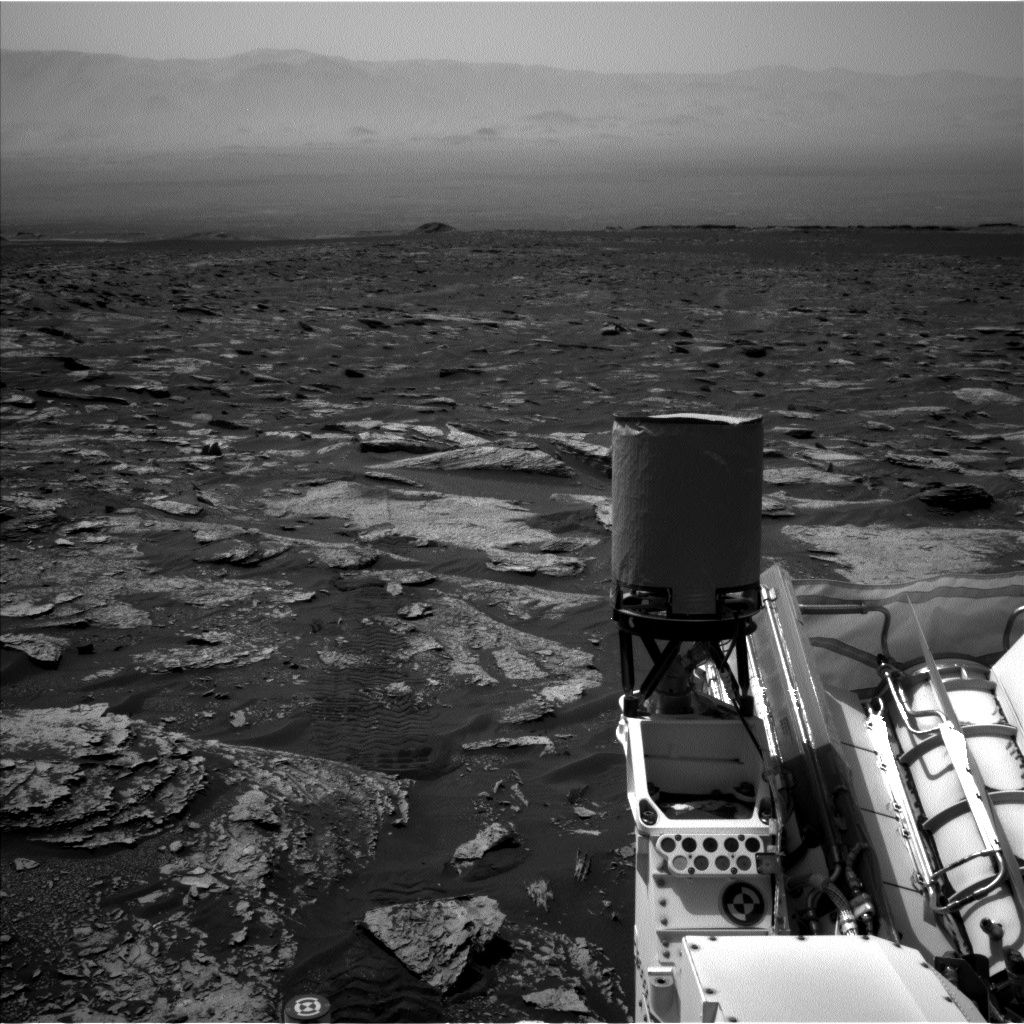
Curiosity Navcam Left B image acquired on Sol 1703, May 22, 2017.
Image Credit: NASA/JPL-Caltech
The plan then calls for the rover to take a short drive and perform post-drive imaging, as well as a ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observation.
Challenging terrain
On the second sol of the plan, Fraeman explains, “Curiosity will be focused on taking atmospheric observations, including a dust devil search and images of the crater rim and sky above us.”
“We didn’t drive as far as we thought we would over the weekend. Software onboard Curiosity sensed the rover was struggling to travel over the challenging terrain more than we had anticipated, so it ended the drive early,” Fraeman notes.
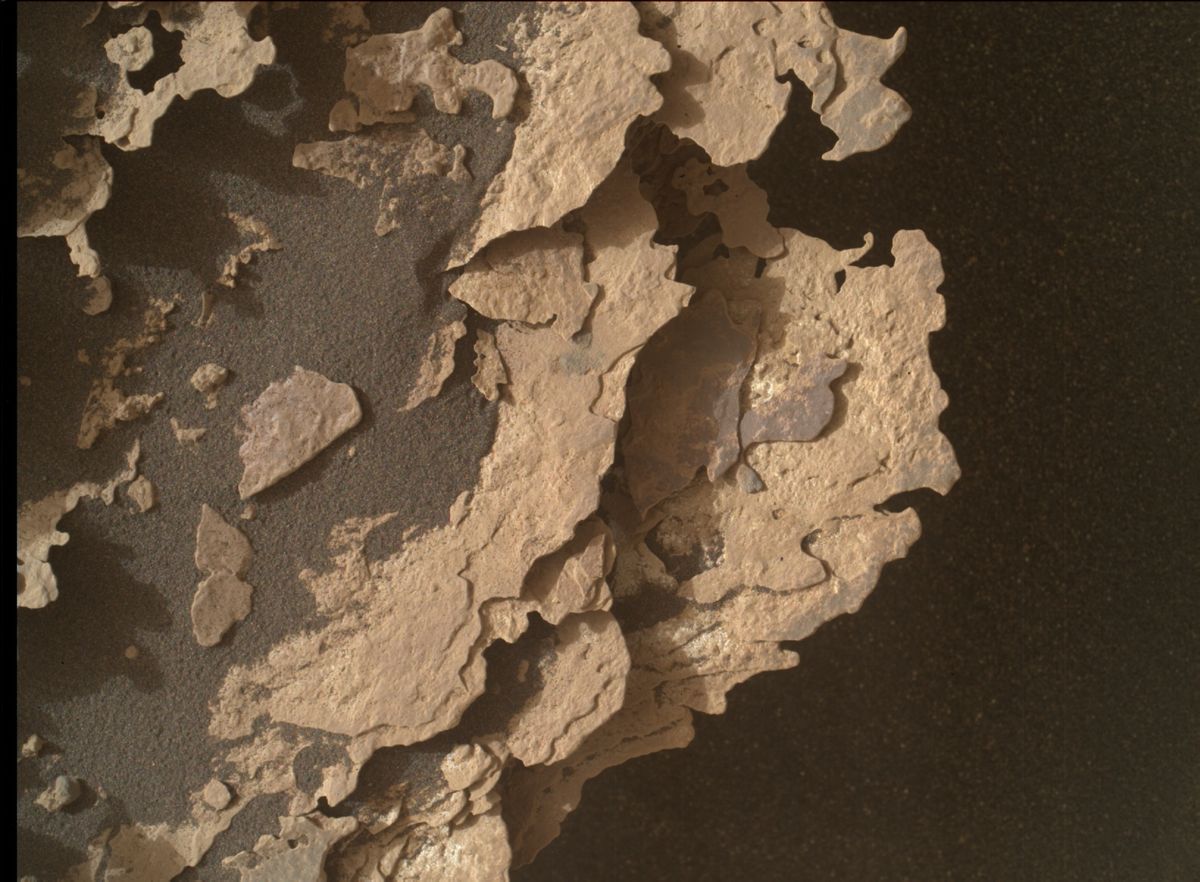
Curiosity Mars Hand Lens Imager (MAHLI) photo taken on Sol 1702, May 21, 2017. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Fraeman adds that she spent a shift looking at the Navcam and Hazcam data to understand what about the terrain was causing problems, and thinking about new paths to take that would still get the rover to the desired locale.
“I’m optimistic about our new drive route,” Fraeman concludes, “and I’m very glad we have six-wheel drive to help us climb this mountain!”
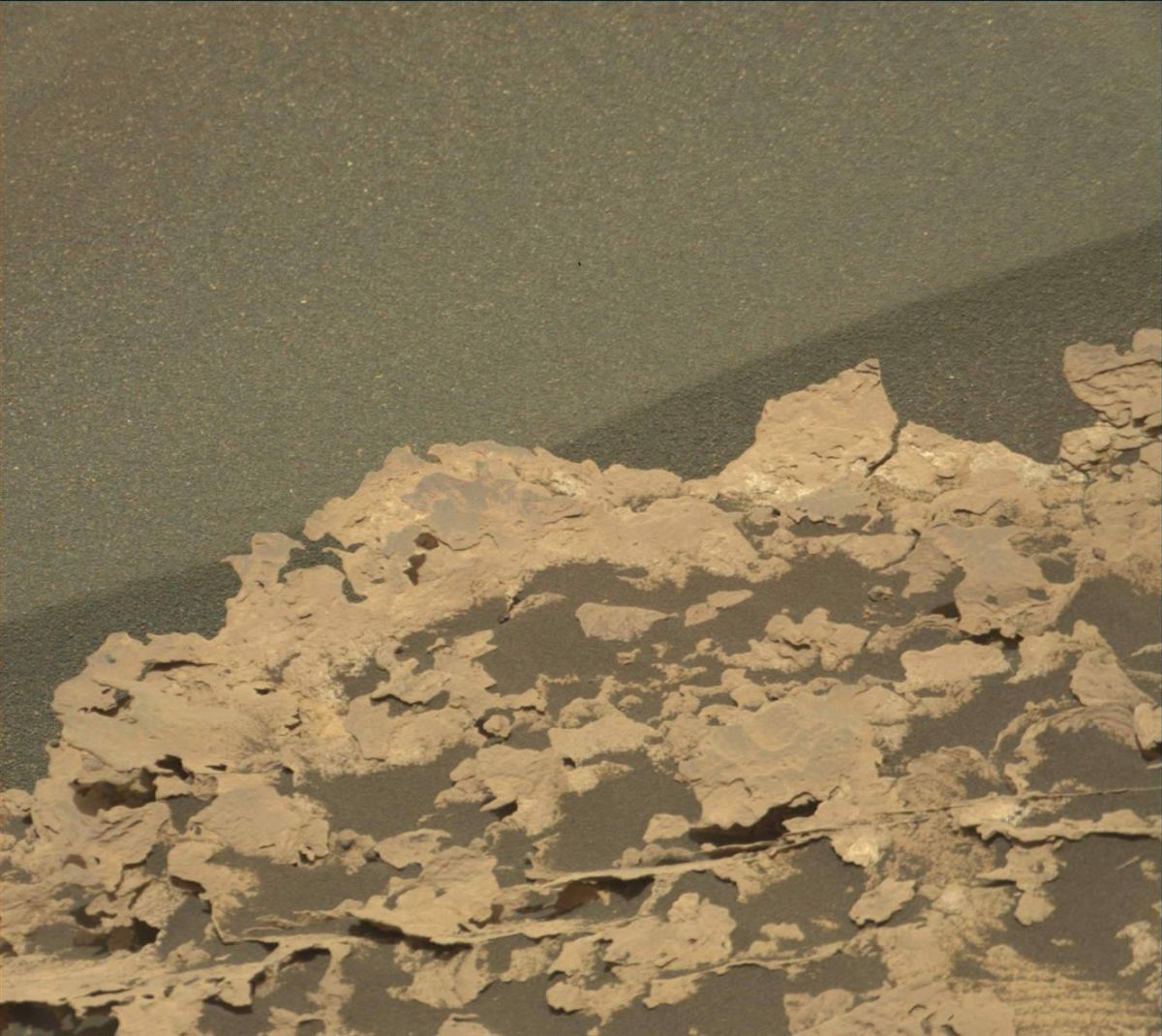
Curiosity Mastcam Right image acquired on Sol 1702, May 20, 2017.
Credit: NASA/JPL-Caltech/MSSS
New map
A new map of Curiosity’s traverse across Mars through Sol 1700 has been issued by JPL.
This map shows the route driven by NASA’s Mars rover Curiosity through the 1700 Martian day, or sol, of the rover’s mission on Mars (May 20, 2017).
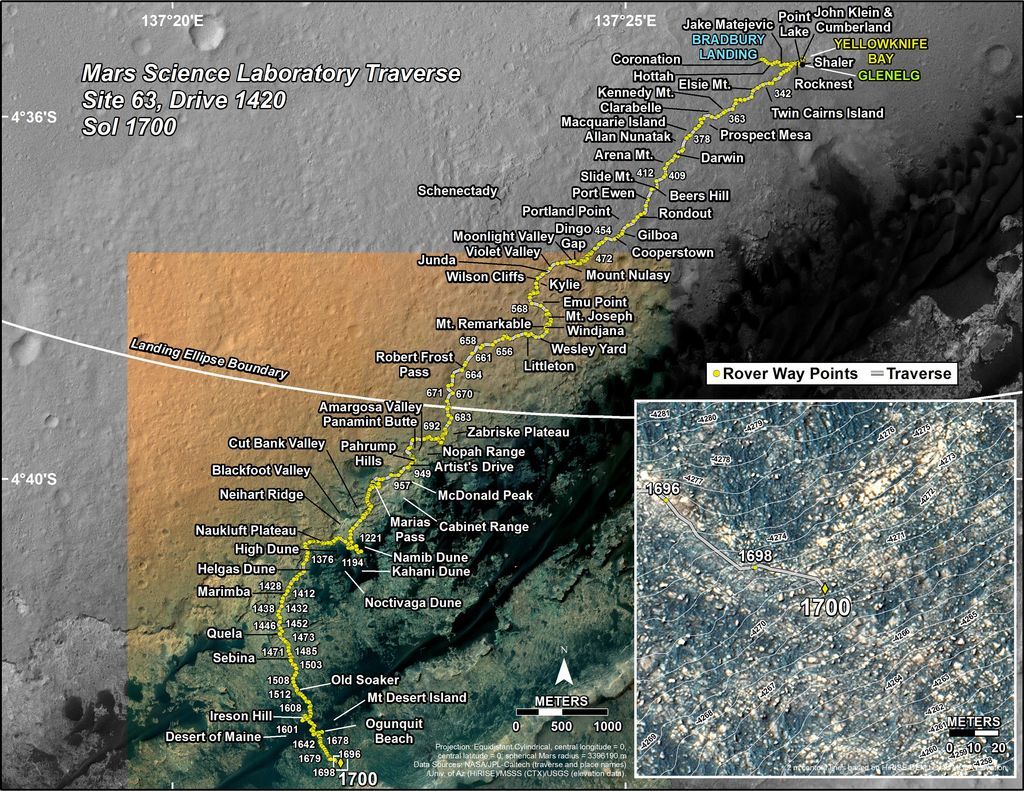
Credit: NASA/JPL-CALTECH/UNIV. OF ARIZONA
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1698 to Sol 1700, Curiosity had driven a straight line distance of about 98.00 feet (29.87 meters), bringing the rover’s total odometry for the mission to 10.24 miles (16.48 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) onboard NASA’s Mars Reconnaissance Orbiter.

