Archive for February, 2019

Chang’e-4 lander as observed by Yutu-2 rover.
Credit: CNSA/CLEP
Five sites on the Moon’s farside now have official names, including the landing site of China’s Chang’e-4 mission.
The names have significance in Chinese culture, reflecting the background of the probe’s team.
The International Astronomical Union (IAU) Working Group for Planetary System Nomenclature has approved the name Statio Tianhe for the landing site where the Chinese spacecraft Chang’e-4 touched down on January 3 this year – the first-ever landing on the farside of the Moon.
The name Tianhe originates from the ancient Chinese name for the Milky Way, which was the sky river that separated Niulang and Zhinyu in the folk tale “The Cowherd and the Weaver Girl”.
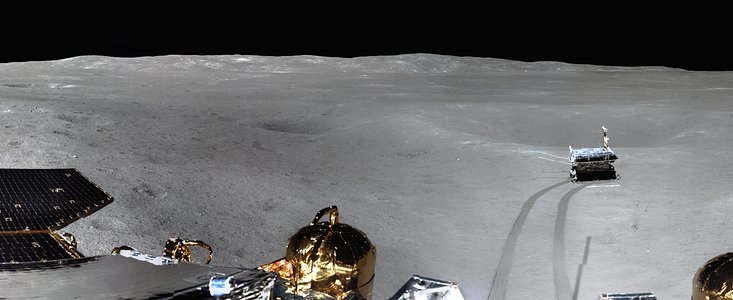
Yutu-2 rover after rolling off Chang’e-4 lander.
Credit: CNSA/CLEP
Other features named
In an IAU statement, four other names for features near the landing site have also been approved.
In keeping with the theme of the folk tale, three small craters that form a triangle around the landing site have been named Zhinyu, Hegu, and Tianjin, which correspond to characters in the tale. They are also names of ancient Chinese constellations from the time of the Han dynasty.
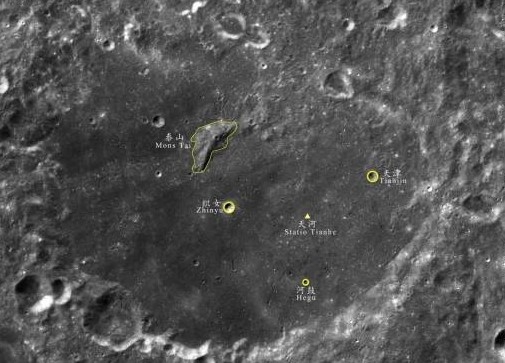
Credit: CNSA
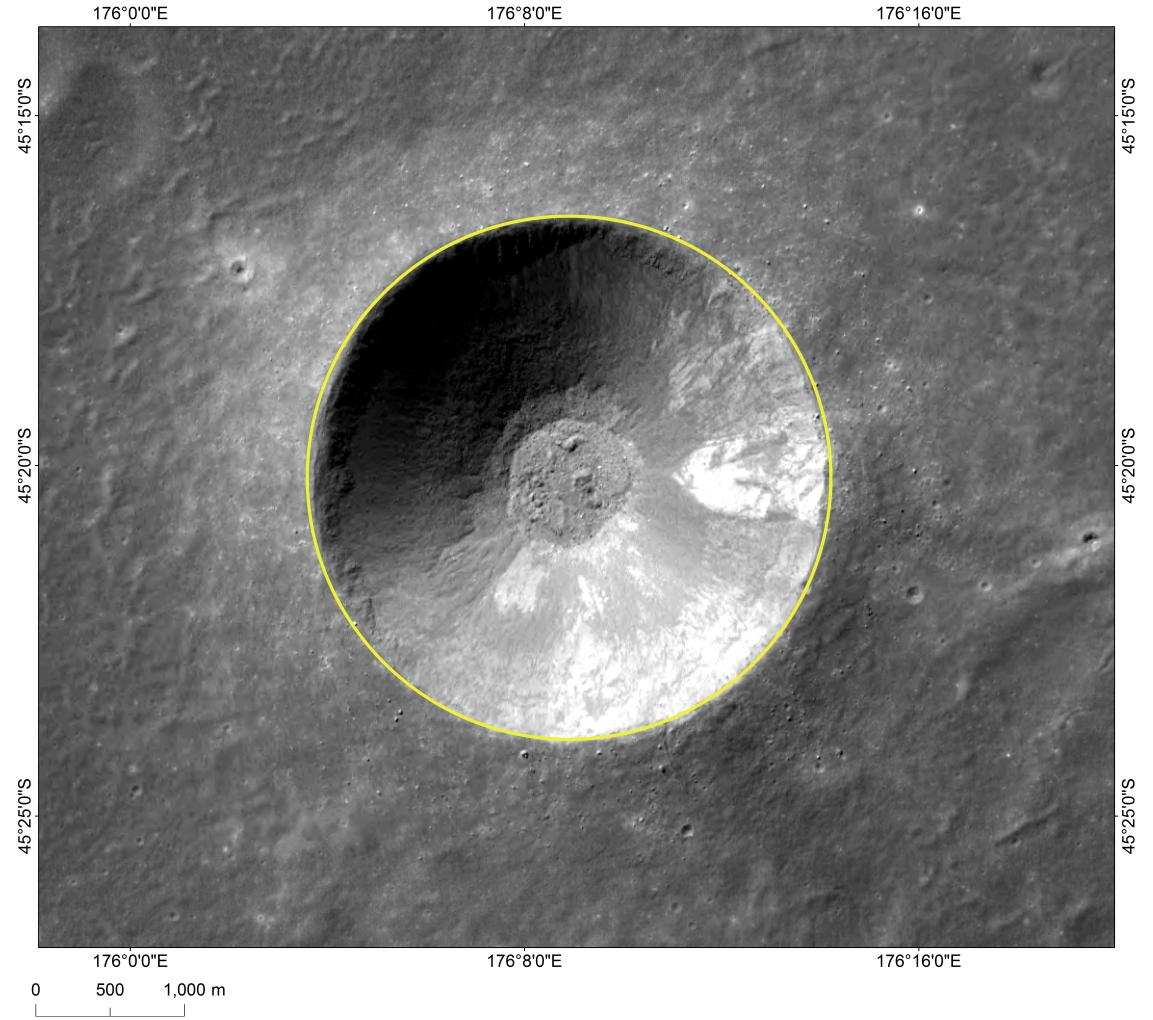
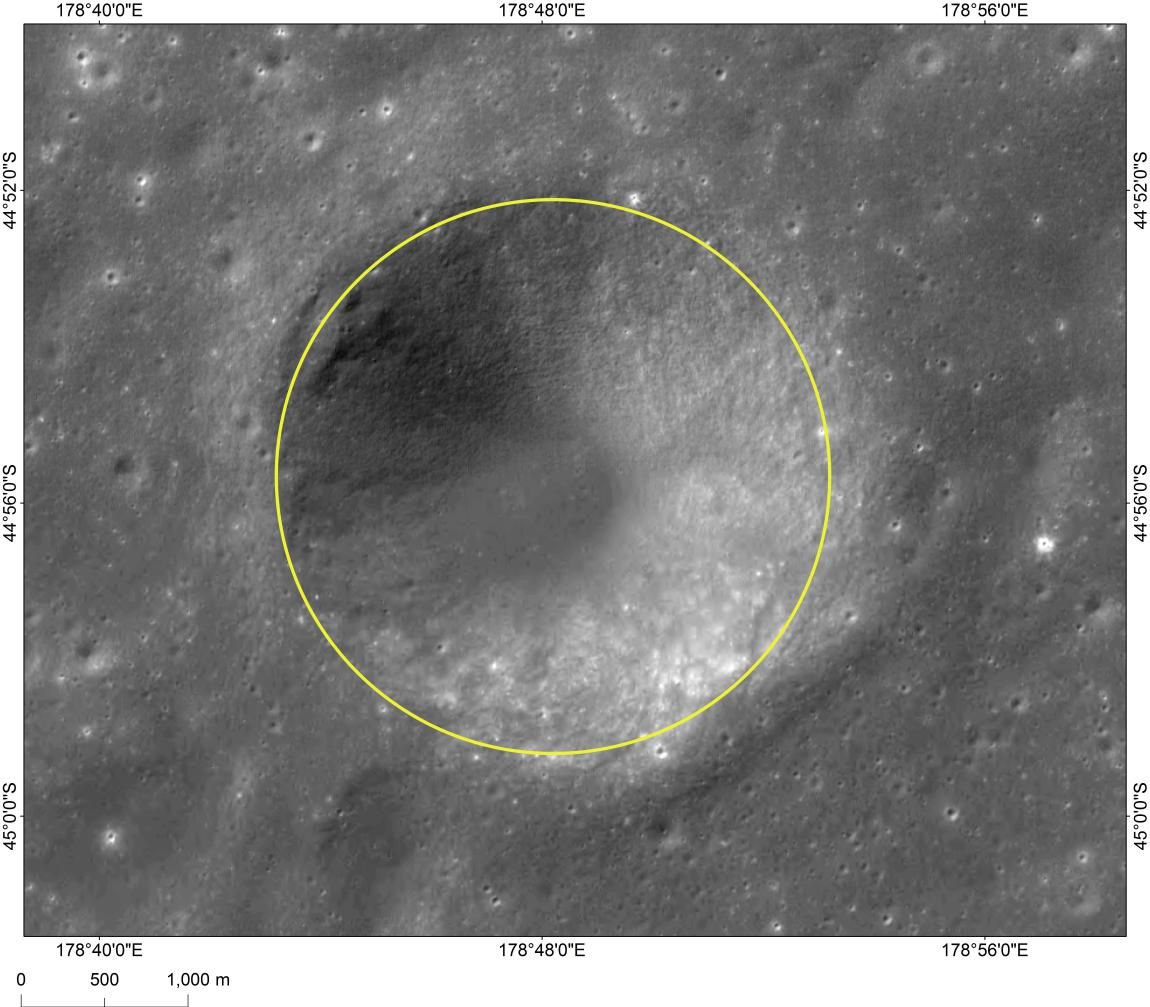
The fifth approved name is Mons Tai, assigned to the central peak of the crater Von Kármán, in which the landing occurred. Mons Tai is named for Mount Tai, a mountain in Shandong, China, and is nearly 30 miles (46 kilometers) to the northwest of the Chang’e-4 landing site.
The central peak, Mons Tai, in the lunar crater measures 1,565 meters in height from its base.

Image of Mons Tai, a hill near “Statio Tianhe”, the landing site of China’s Chang’e-4 lunar probe.
Credit: CNSA
Zhinyu crater
Credit: CNSA
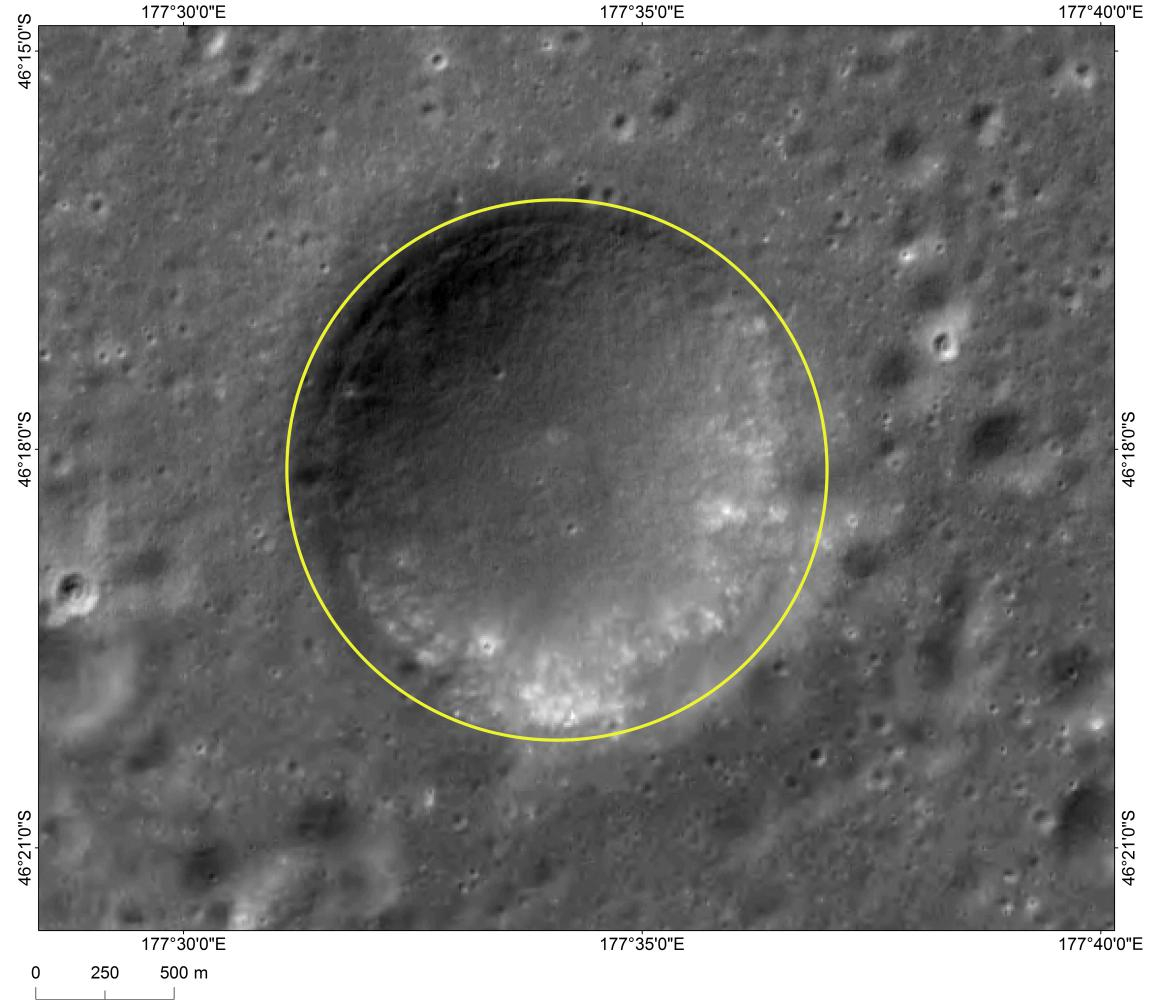
Hegu crater
Credit: CNSA
Tianjin crater
Credit: CNSA
Credit: Robotic Exploration Lab/Stanford University
NanoRacks has announced the firm has successfully completed its sixth CubeSat deployment mission from Northrop Grumman’s Cygnus spacecraft.
Cygnus (S.S. John Young) departed the International Space Station on February 8th, 2019 and performed a number of on-orbit activities, including the NanoRacks deployment on February 13th.

Northrop’s Cygnus departs International Space Station.
Credit: NASA
KickSat-2
One of those deployments was the KickSat-2, let loose well below the International Space Station altitude due to the satellite sub-deploying smaller “ChipSats,” also known as “Sprites.”
Given their size they are dubbed femtosatellites.
These ultra-tiny spacecraft include power, sensors, and communication systems on a printed circuit board measuring 3.5 by 3.5 centimeters, with a thickness of just a few millimeters and a mass of just a few grams.
Chip-scale sensors
The Sprite has a microcontroller, radio, and solar cells and is capable of carrying chip-scale sensors like magnetometers, gyroscopes, and radiation sensors.
To lower costs, Sprites are designed to be deployed hundreds at a time in low Earth orbit and to simultaneously communicate with a ground station receiver.
The ChipSats are expected to be in orbit for merely a few days before burning up.
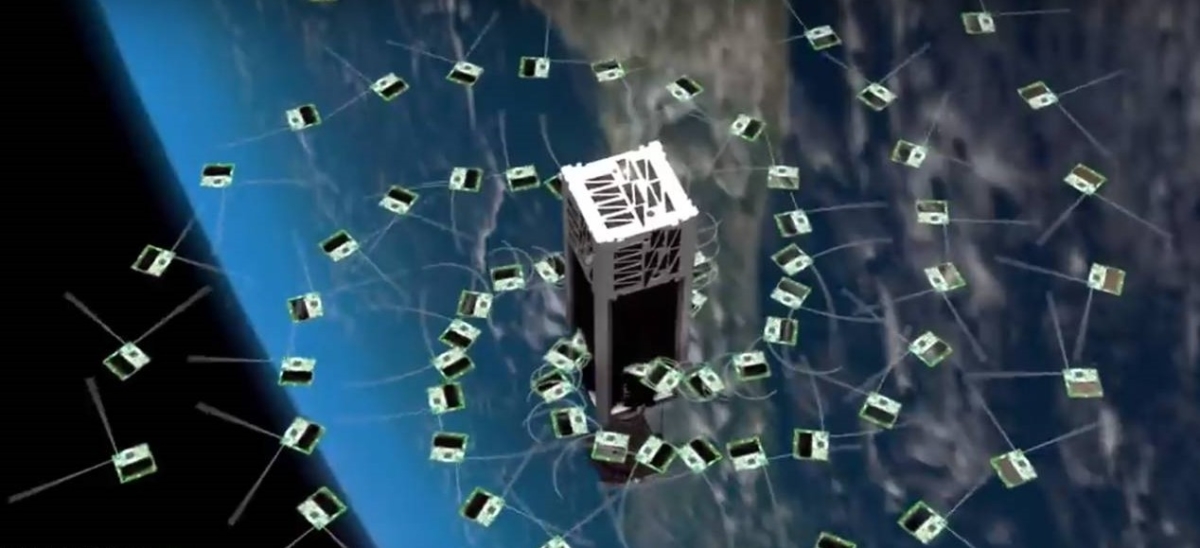
KickSat2 depiction of a hundred ChipSats.
Credit: Robotic Exploration Lab/Stanford University/Screengrab Inside Outer Space
Technology testbed
The goal of KickSat is to dramatically lower the cost of spaceflight, making it easy enough and affordable enough for anyone to explore space.
This can be realized by shrinking the size and mass of the spacecraft, allowing many to be launched together.
KickSat also serves as a technology testbed for networking and swarming algorithms for small spacecraft.
For a video on KickSat-2 effort, go to:
https://www.youtube.com/watch?time_continue=10&v=I7xvQgClMf0
For more information on the innovative NanoRacks company, go to:
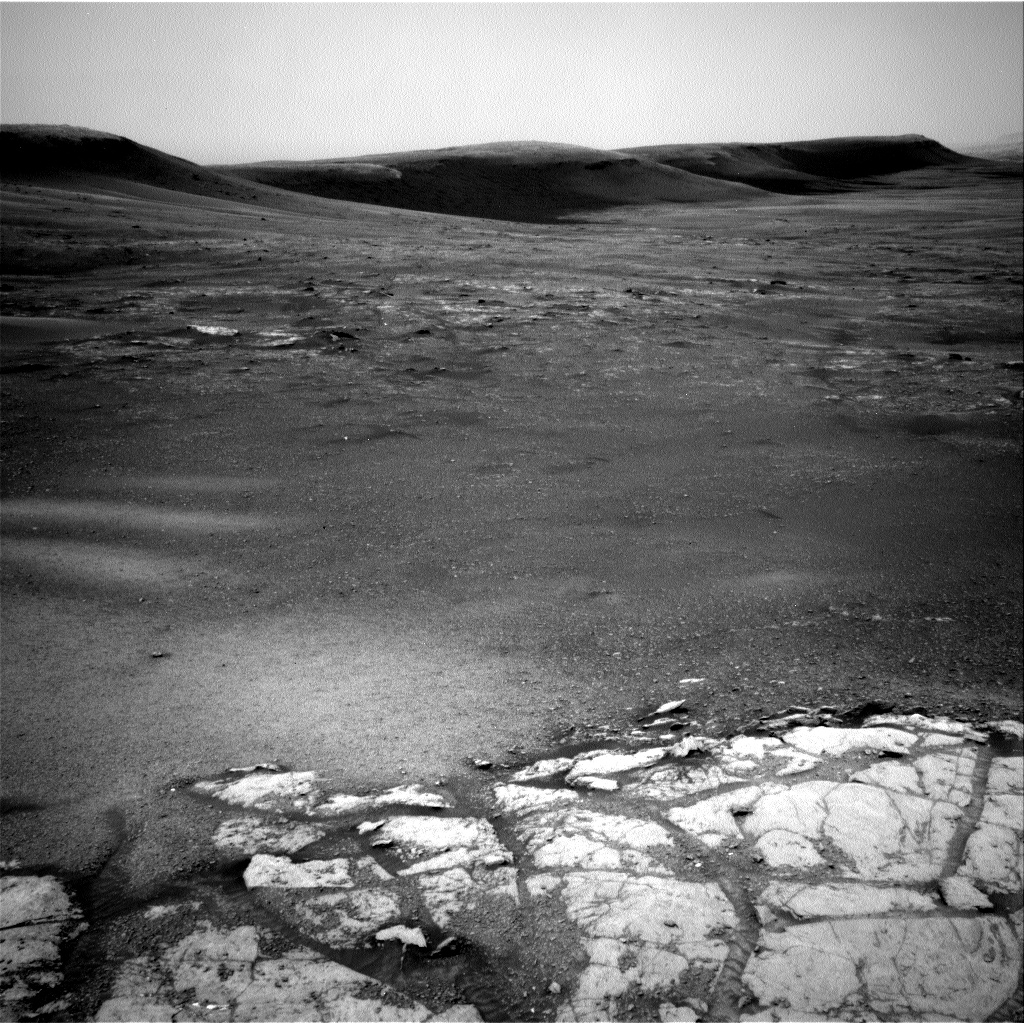
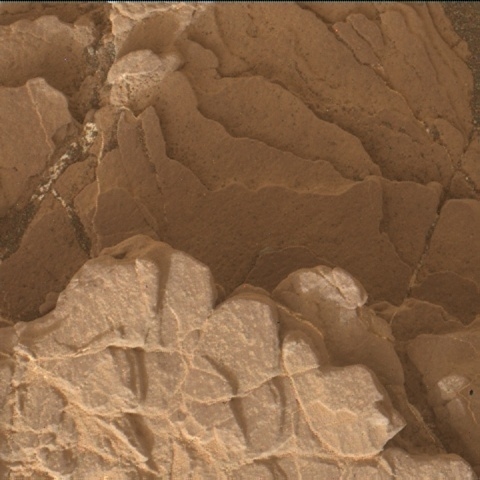
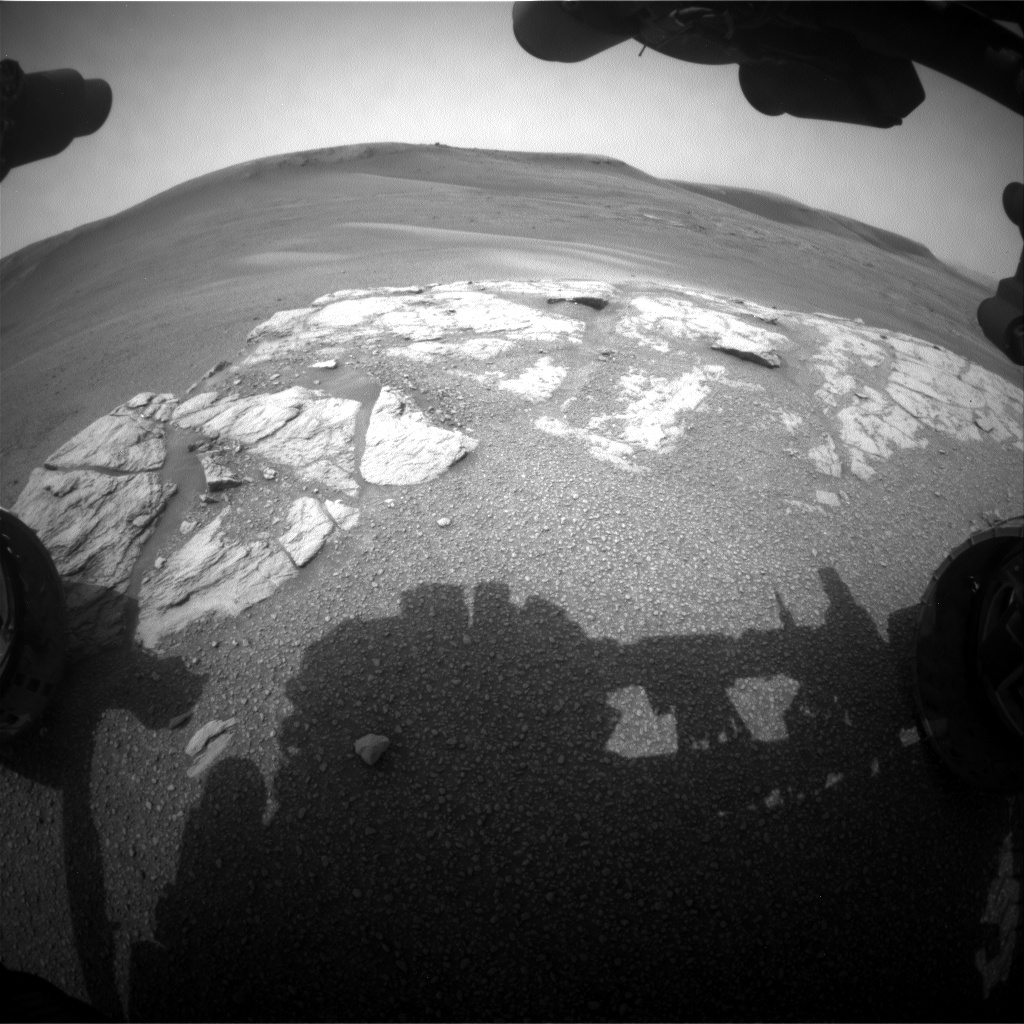
Image of the Glen Torridon area. The bright exposure of rock in the foreground is the top of the area being interrogated by the contact science instruments in the plan tosol. This gives way to the rubbly and sandy terrain in the background, with a few areas of bedrock exposure, flanked by the southern edge of the Vera Rubin Ridge behind.
Photo acquired by Curiosity Navcam Left A on Sol 2316, February 10, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2320 duties and at work within the Glen Torridon site.
Reports Lucy Thompson, a planetary geologist from the University of New Brunswick, Fredericton, New Brunswick, Canada: “Similar to its namesake in Scotland, the Glen Torridon area on Mars affords us stunning vistas, but in our case, of the relatively low-lying clay bearing (from orbit) unit flanked to the north by the higher ground of the Vera Rubin Ridge and to the south, by Mount Sharp.”
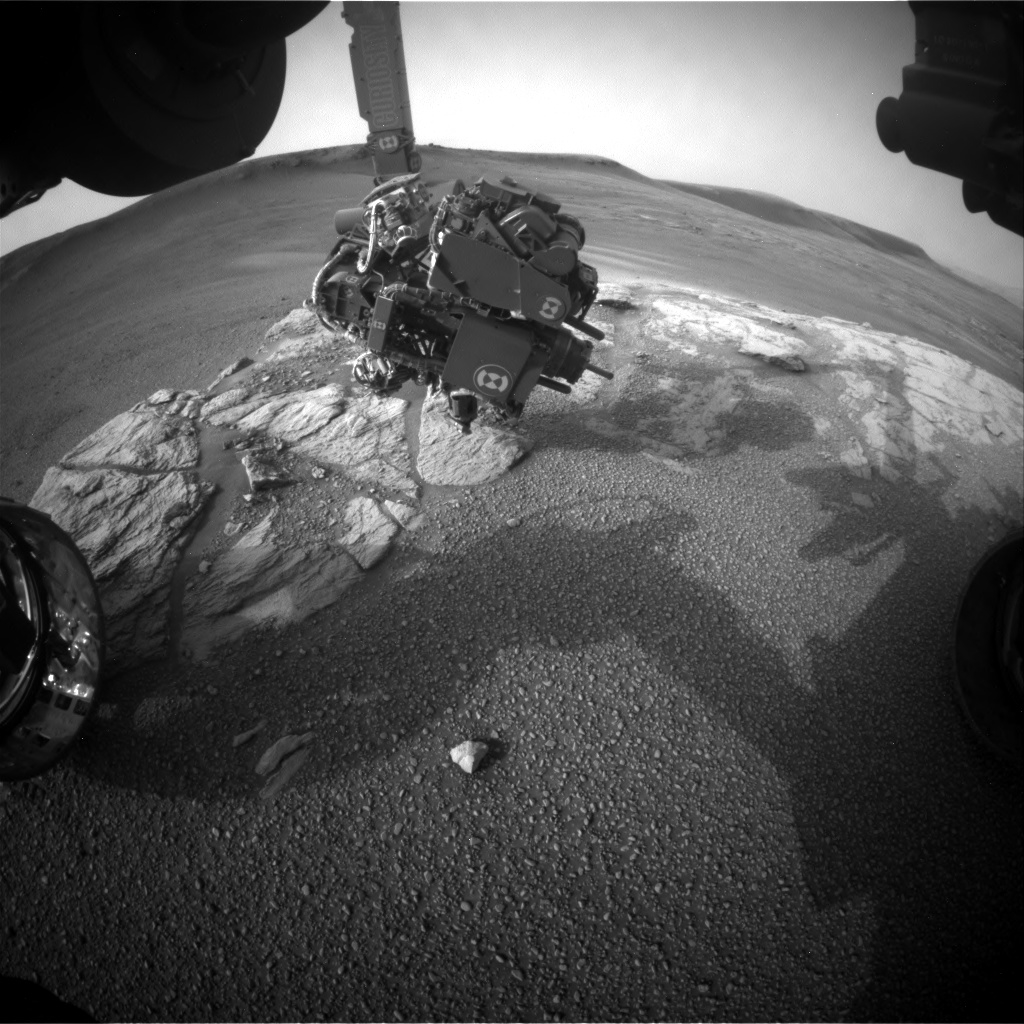
Curiosity Front Hazcam Left A image taken on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech
Scenic views
Mars scientists have been capturing the scenic views with the rover’s Mastcam, Navcam and Front Hazcam cameras, “and stopping for a taste of what this area has to offer by analyzing the local terrain with our suite of contact science instruments,” Thompson adds, as well as with the Chemistry and Camera (ChemCam) and Mastcam.

Curiosity Mastcam Left image taken on Sol 2317, February 11, 2019.
Credit: NASA/JPL-Caltech/MSSS
“The drive we took over the weekend went off without a hitch and placed us on one of the few examples of more coherent, in-place bedrock exposures in the area,” Thompson notes. “As such, we decided to put the brakes on and take some time to investigate in more detail.”
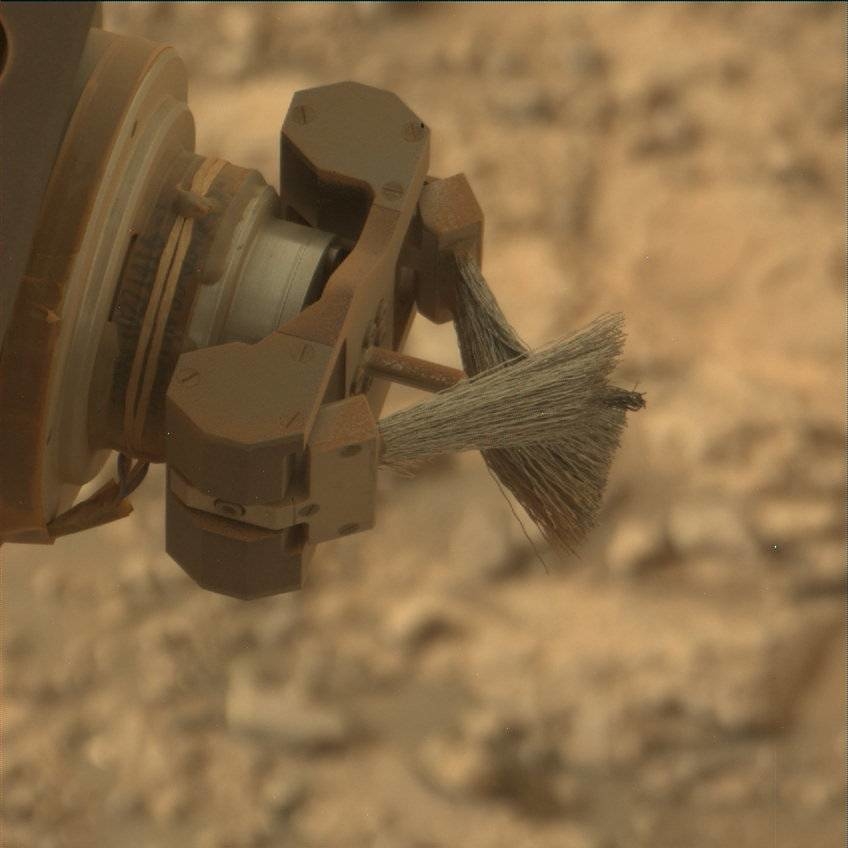
Bedrock brushing
The schedule calls for deployment of Curiosity’s robotic arm to first brush a typical area of bedrock called “Curlew.” This action removes as much of the Mars surface dust as possible, before taking close-up images of the target with the robot’s Mars Hand Lens Imager (MAHLI) and then analyzing it for chemistry with the Alpha Particle X-Ray Spectrometer (APXS).

Curiosity Mars Hand Lens Imager (MAHLI) produced on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech/MSSS
“The arm will also place us to take close up MAHLI images and obtain chemistry with APXS of another slightly different looking area (color and texture) of exposed bedrock (“Gannet”),” Thompson says. “To complement these observations, we also planned ChemCam laser-induced breakdown spectroscopy (LIBS) on the “Gannet” target, and Mastcam multispectral observations to cover both targets to look for spectral variations across the outcrop.”
Mixture of rubbly rock and sand
ChemCam is also set to investigate the composition of two other bedrock targets (“Beryl” and “Ladyburn”), and a pebble target (“Southness”) with LIBS and Mars researchers will increase the color image coverage of this exposure with Mastcam.
Curiosity Mars Hand Lens Imager (MAHLI) produced on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech/MSSS
The rover’s Dynamic Albedo of Neutrons (DAN) is slated to perform active and passive measurements, included to investigate the distribution of subsurface hydrogen in the bedrock and regolith.
“We also planned a large Mastcam mosaic to capture the view out the front window. It will include the cliffs of the Vera Rubin Ridge as well as the drive direction, which is a mixture of rubbly rock and sand and low-lying bedrock exposures, one of which (“Midland Valley”) we hope to drive to next,” Thompson reports.

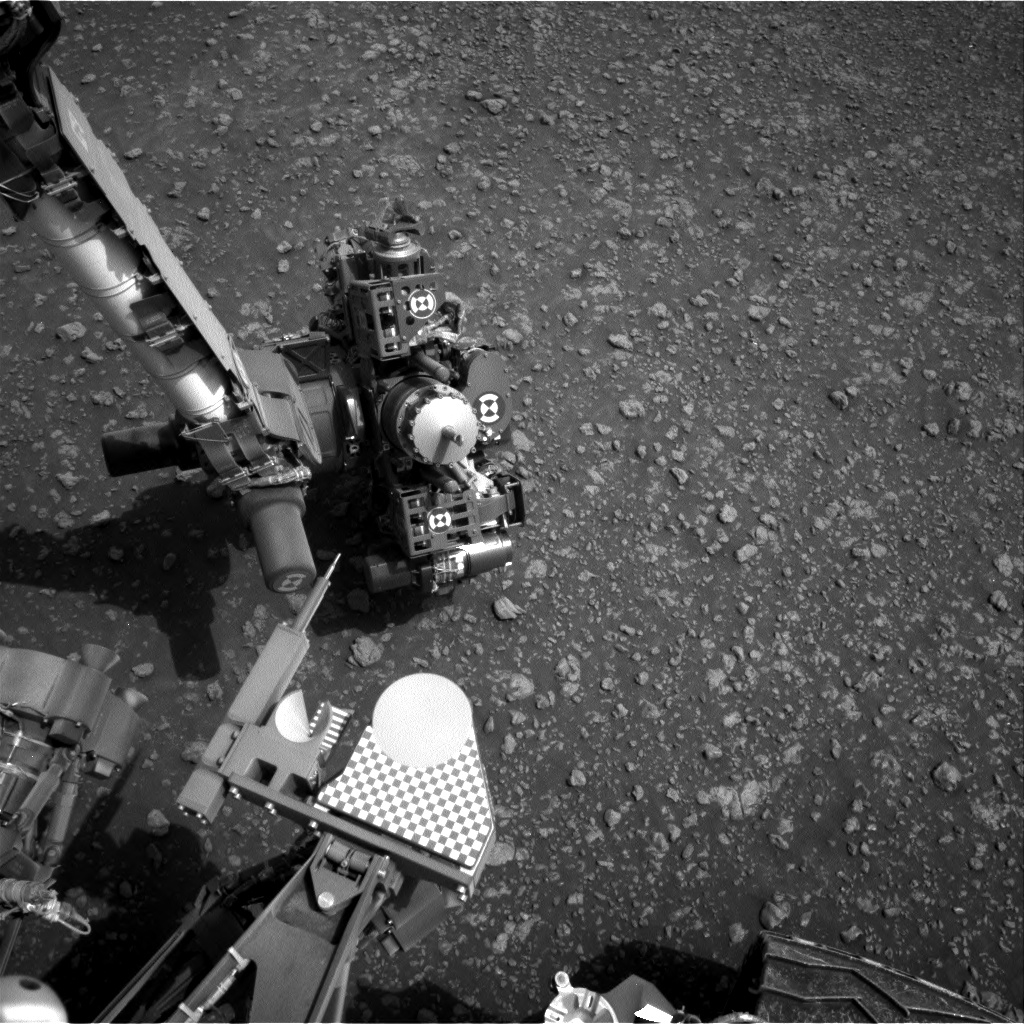
Curiosity Navcam Right A image acquired on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech
Fun, busy day
“The data we collect will help us to compare the Glen Torridon area with other regions we have encountered on the mission; specifically the rocks we analyzed on the Vera Rubin Ridge, as well as the other Murray formation sedimentary rocks we encountered prior to the Vera Rubin Ridge,” Thompson adds. “It will also allow us to place this area in context as we continue to climb Mount Sharp.”
Curiosity Mastcam Right photo taken on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech/MSSS
Curiosity is also monitoring the environment as the Mars machinery tours Glen Torridon.
Also included in the plan are standard background Rover Environmental Monitoring Station (REMS) activities that monitor the daily martian weather, two Navcam dust devil movies and a Navcam dust devil survey. Also to be done is monitoring the radiation environment with Curiosity’s Radiation Assessment Detector (RAD).
“A fun, busy day of planning on Mars with lots of great observations,” Thompson concludes.
I am pleased to be part of National Geographic’s yearlong journey – Starstruck — exploring the past, present, and future of space exploration.
My new book for National Geographic – Moon Rush: The New Space Race – will be launched in May, a volume that explores the Moon in all its facets, from ancient myth to future “Moon Village” plans; inside information about how the United States, allies and competitors, as well as key private corporations like Moon Express and Jeff Bezos’s Blue Origin, plan to reach, inhabit, and even harvest the Moon in the decades to come.
For more information on Moon Rush: The New Space Race, go to:
https://www.barnesandnoble.com/w/moon-rush-leonard-david/1129287265?ean=9781426220050
https://www.amazon.com/Moon-Rush-New-Space-Race/dp/1426220057
https://itunes.apple.com/us/book/moon-rush/id1425691045?mt=11
Official launch
National Geographic has officially launched Starstruck – a celebration of space across its global networks, magazines, books and more.
For starters, MARS: INSIDE SPACEX, premiered Monday, November 12, at 8 p.m. eastern, offering an unprecedented glimpse into SpaceX and Elon Musk’s plans to make Mars home.
For more information, go to:
http://www.natgeotv.com/int/mars-inside-spacex
Season 2 of National Geographic’s TV docudrama MARS premiered on November 12 at 9 p.m. eastern.
Credit: National Geographic
For more information, go to: https://www.nationalgeographic.com/tv/mars/
Please check out my book — Mars: Our Future on the Red Planet — the companion book to the National Geographic Channel MARS TV series that takes a look at the promise, problems, and potential pitfalls as humans land on and learn to live on Mars.
Go to:
https://www.amazon.com/Mars-Our-Future-Red-Planet/dp/1426217587
https://www.barnesandnoble.com/w/moon-rush-leonard-david/1129287265?ean=9781426220050
https://itunes.apple.com/us/audiobook/mars-our-future-on-the-red-planet/id1421162640

Credit: NASA
Apollo 11…and beyond
Culminating with the 50th anniversary of the historic Apollo 11 Moon landing next July and a coinciding week of Apollo programming on National Geographic channel, Starstruck will rally National Geographic’s unrivaled portfolio of storytelling platforms around the spirit of space exploration, and the nostalgia, curiosity and feeling of limitless possibility that it brings.
Join in on all the National Geographic activities… and don’t forget to look up.
For more information, go to:
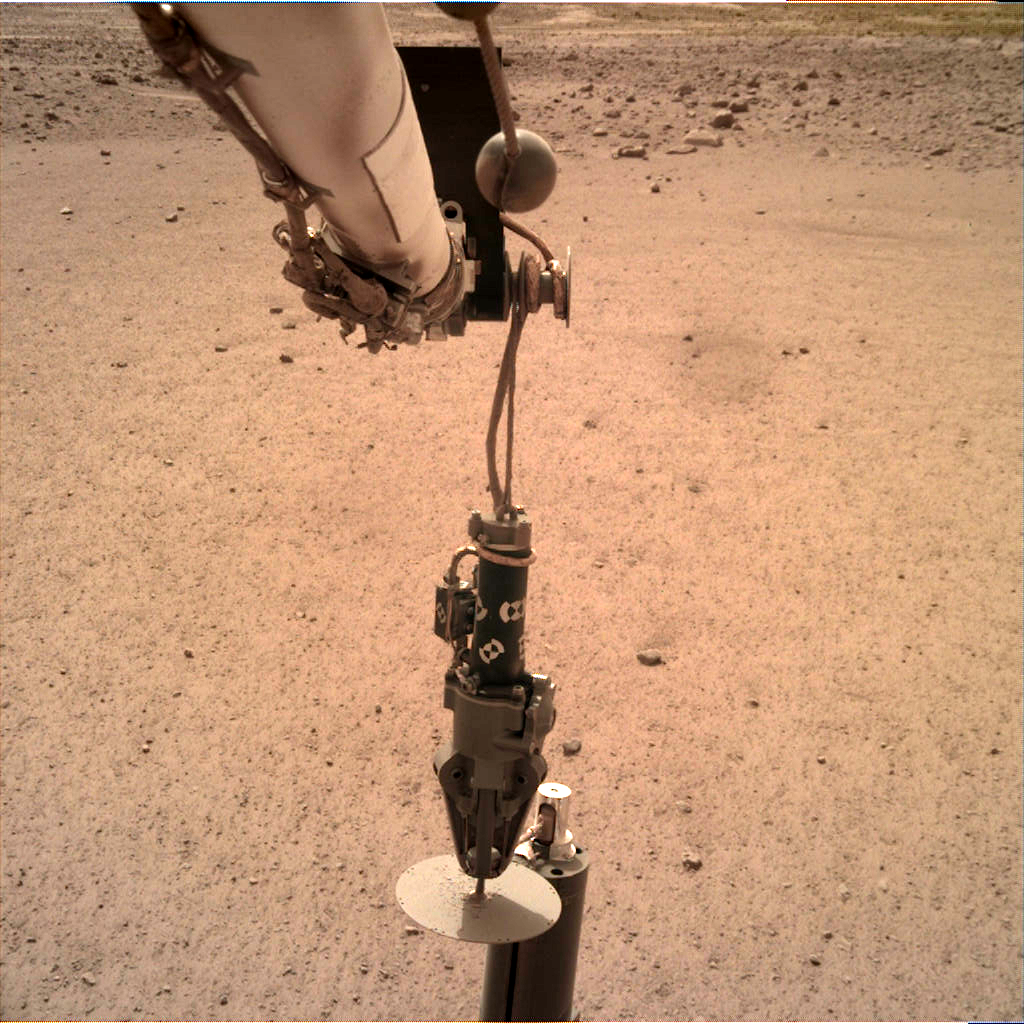
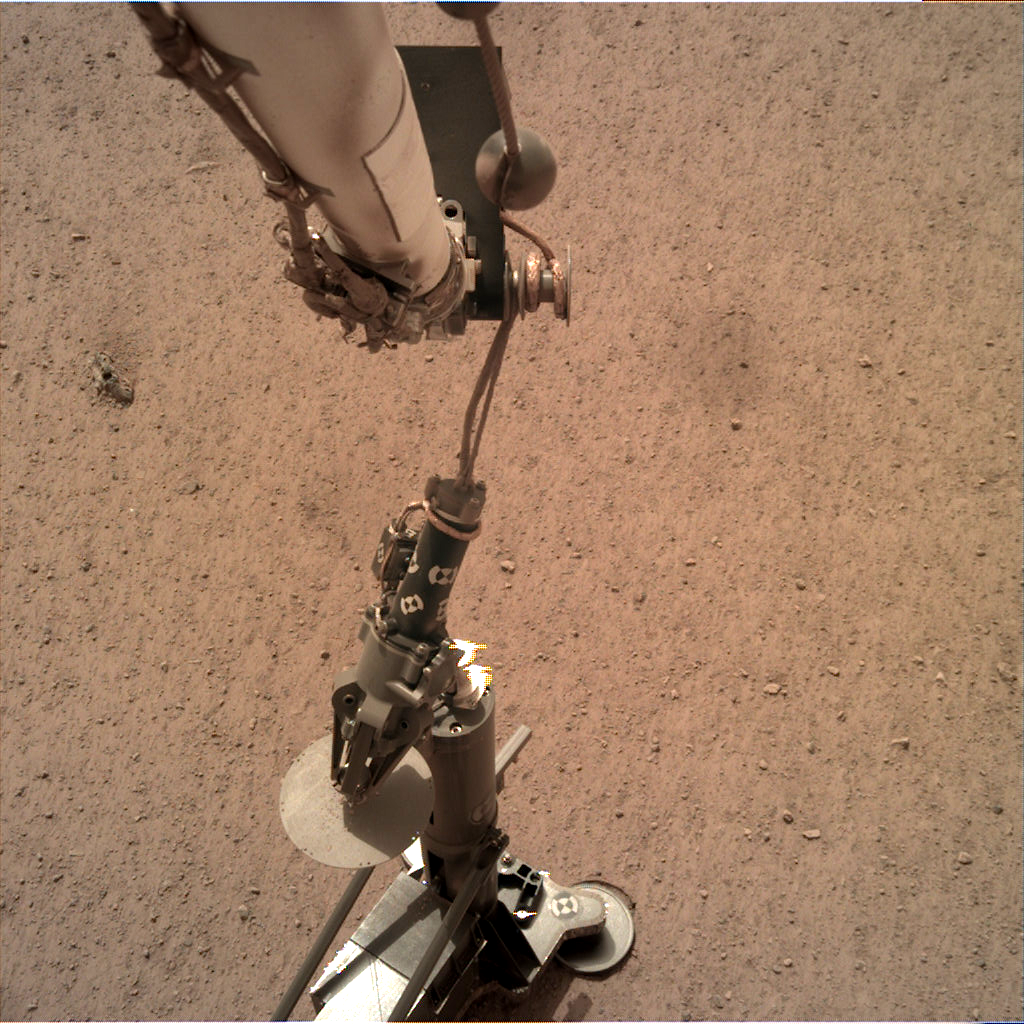
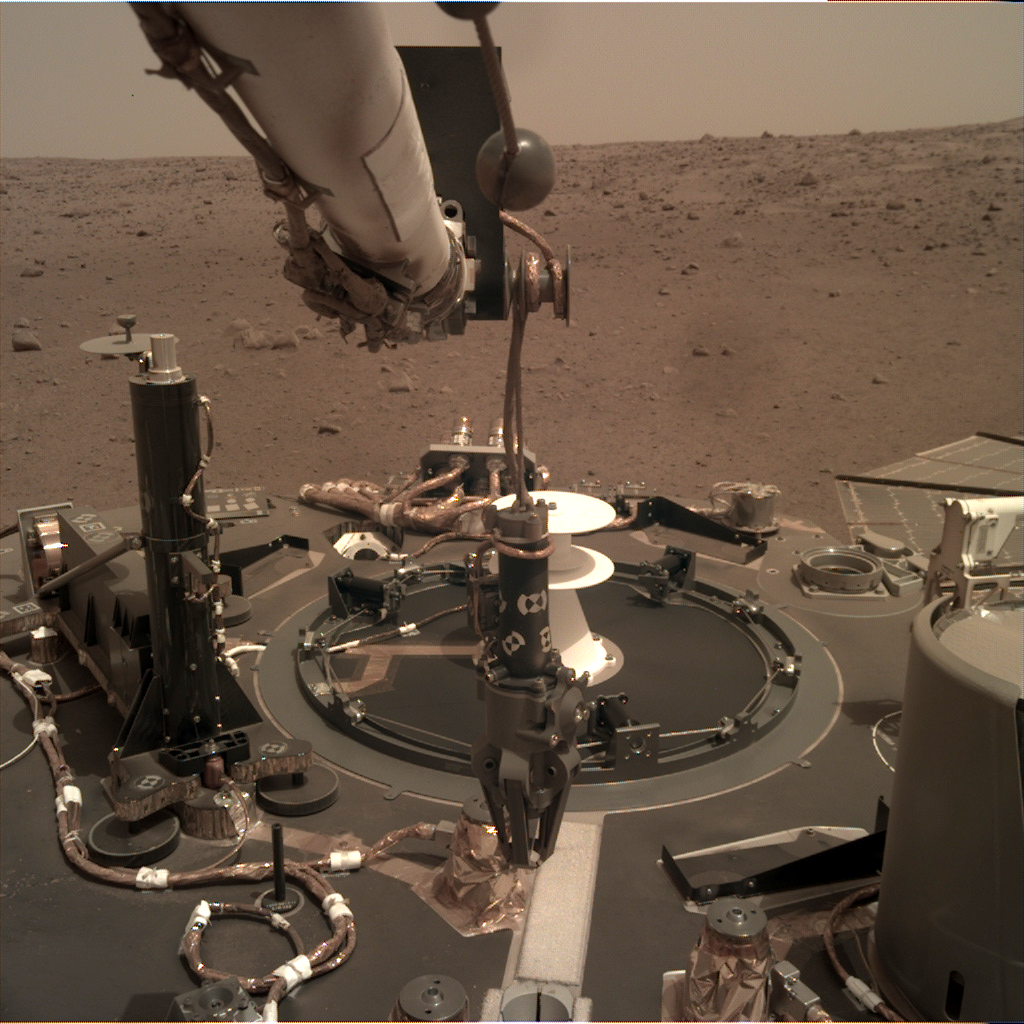
On Sol 76, February 12, 2019, InSight’s Instrument Deployment Camera (IDC)
acquired a series of images showing deployment of the Heat Flow and Physical Properties Package (HP3). Credit: NASA/JPL-Caltech
NASA’s InSight Mars lander has successfully achieve a major milestone by deploying the German-supplied Heat Flow and Physical Properties Package (HP3).
Like the seismometer and Wind and Thermal Shield, the HP3 was placed on the surface of Mars by InSight’s robotic arm.
HP3 is designed to burrow down beneath the Red Planet’s topside — with its tether embedded with heat sensors — to a depth of 16 feet (five meters). The HP3 is slated to plow deeper than any previous arms, scoops, drills or probes before it.
Mole on Mars
HP3 can take Mars’ temperature to reveal how much heat is still flowing out of the interior of the planet.
Weighing a little over 6.5 pounds (about 3 kilograms) HP3’s “Mole” hammers itself under the surface. A maximum of 2 watts of power is available while burrowing underneath the surface.
The German Aerospace Center’s (DLR) HP3 heat flow probe has the Mole pulling a ribbon cable equipped with 14 temperature sensors behind it. Once the probe has reached its target depth, the temperature will be measured by all of the sensors every 15 minutes for several months.
Stable position
“We are pleased that the deployment of our HP³ experiment onto the Martian surface went so smoothly,” says Principal Investigator Tilman Spohn from the DLR Institute of Planetary Research in Berlin.

Credit: DLR
HP³ is now in a stable position approximately 5 feet (1.5 meters) from the lander.
“We hope that the Mole will not encounter any large rocks on its way into the subsurface,” Spohn says. The Seismic Experiment for Interior Structure (SEIS) was deployed previously – complete with an additional cover to protect it against wind and temperature fluctuations – at a similar distance from the InSight lander.
SEIS and HP³ are roughly 3 feet (one meter) apart.
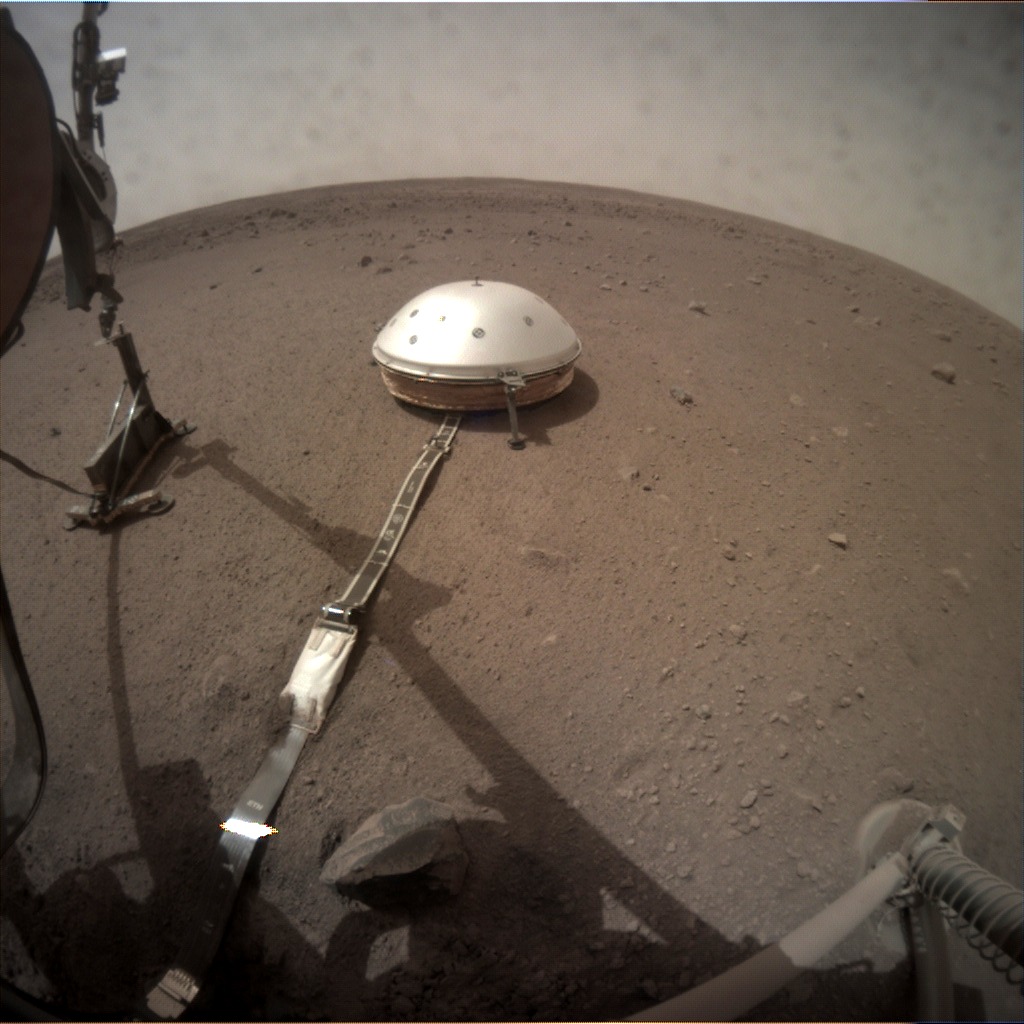
Sol 76 image taken by Instrument Context Camera (ICC) shows HP3 placed near seismometer. Photo acquired on February 12, 2019.
Credit: NASA/JPL-Caltech

HP3 on the surface of Mars to the right of the InSight seismometer, SEIS, the Seismic Experiment for Interior Structure device.
Credit: NASA/JPL-Caltech
The InSight Mars lander has successfully placed the self-penetrating temperature and thermal conductivity probe (HP3) down safely on the surface of Mars!
“The team here is extremely happy to have completed this step after waiting for more than a month for deployment,” reports Tilman Spohn, principal investigator of the device from the German Aerospace Center (DLR) Institute of Planetary Research in Berlin.
InSight Sol 71 image taken by Instrument Deployment Camera (IDC) on February 7, 2019. German Heat Flow and Physical Properties Package (HP3) is seen at left of robotic arm.
Credit: NASA/JPL-Caltech
Hammering sequence
“There will be check-outs for the remainder of this and most of next week, but Friday Feb 22nd we should be commanding the first hammering sequence to be executed on Saturday,” Spohn adds. “This will be Sol 86 on Mars (planning sol 87). We plan to start in the morning local Mars time (around 9am) with a hammering cycle of 4 hours to get to 70 centimeter depth.”

Components of the HP3 heat flow probe. Top left: the radiometer (RAD), which is used to measure the radiation temperature (roughly equivalent to the ground temperature) of the surface. Right: the casing with the mole penetrometer, the temperature measuring cable (TEM-P) and the data cable (ET) connected to the lander. In addition, the casing contains an optical length meter for determining the length of the temperature measuring cable that has been pulled from the casing. The mole contains the TEM-A active thermal conductivity sensor and the STATIL tiltmeter. Bottom left: the electronic control unit, known as the back end electronics (BEE), which remains on the lander and is connected to the probe via the ET.
Credit: DLR.
Tilman Spohn, principal investigator (right) celebrating successful HP3 deployment with colleague.
Credit: Tilman Spohn/DLR
According to Spohn, as they do not know what the resistance of the regolith will be like – they have their guesses – not known is how much progress they will get in 4 hours.
“The data are expected to come down in the early morning of Sunday PST or early afternoon CET,” a happy Spohn reports.

High-rise rocketry. Leo Aerospace prepares balloon to loft launch vehicle as a forerunner test for hurling microsatellites into Earth orbit.
Credit: Leo Aerospace/Purdue University
Leo Aerospace LLC has given notice that the group had a successful launch of a rocket from a high-altitude balloon – a concept that team members see as making space accessible to microsatellites.
The startup idea was developed while they were students at Purdue University.
Leo Aerospace is a Purdue University-affiliated startup based in Los Angeles, California.
Motivation behind the balloon-assisted rocket launch is to help end the backlog of microsatellites that wait months or longer to “hitch” a ride on larger rockets.

Up, up and away. Rocket departs balloon.
Credit: Leo Aerospace/Purdue University/Inside Outer Space Screengrab
Reusable launch pad
Leo Aerospace launched its first “rockoon,” a high-power rocket from a reusable balloon platform, from the Mojave Desert in southern California in December.
In a Purdue press statement, Leo Aerospace aims to revolutionize access to space for those looking to launch small satellites about the size of toasters, weighing up to 25 kilograms, or about 110 pounds. It plans to be a “dedicated” launch for microsatellites, serving one customer at a time.

Credit: Leo Aerospace
Using the high-altitude balloon as a launch pad will save money because it will deploy the rocket from up to 11 miles into the atmosphere. At that altitude, there is 95 percent less atmosphere, meaning there is much less drag. That means Leo Aerospace can use smaller rockets and less fuel.
Leo Aerospace already has begun taking letters of intent from microsatellite companies. In step-wise fashion, the group plans to begin doing suborbital launches next year and break the edge of space by 2021. Suborbital launches allow scientists to gather information about the atmosphere and other research data.
The goal is to be able to start launching microsatellites into orbit by 2022.
Go to this video showing the launch at:
For more information on Leo Aerospace, go to:

Credit: DIA Public Affairs
The Defense Intelligence Agency (DIA) has released “Challenges to Security in Space,” a report that examines the space and counterspace programs that could challenge U.S. or partner interests in the space domain.
The report notes that “space-based capabilities provide integral support to military, commercial and civilian applications” and that “longstanding technological and cost barriers to space are falling, enabling more countries and commercial firms to participate in satellite construction, space launch, space exploration and human spaceflight.”

Visualization: DIA, D3 Design • 1812-20432
Modern warfare
Among items detailed, the report notes that:
Chinese and Russian military doctrines indicate they view space as important to modern warfare and counterspace capabilities as a means to reduce U.S. and allied military effectiveness.
Both countries have developed robust and capable space services, including space-based intelligence, surveillance and reconnaissance.
Visualization: DIA, D3 Design • 1811-20013
China and Russia are making improvements to existing systems including space launch vehicles and satellite navigation constellations. These capabilities provide their militaries with the ability to command and control their forces worldwide with enhanced situational awareness, enabling them to monitor, track and target U.S. and allied forces.
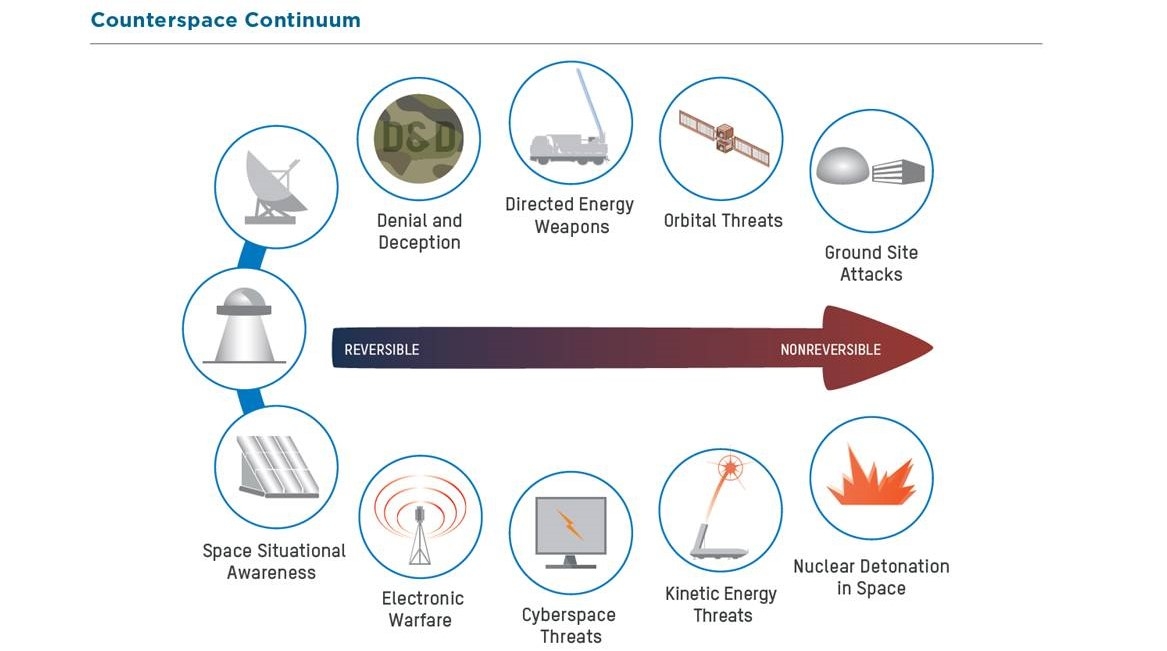
Reversible to non-reversible effects
The DIA report adds that Chinese and Russian space surveillance networks are capable of searching, tracking and characterizing satellites in all earth orbits. This capability supports both space operations and counterspace systems.
Both states are developing jamming and cyberspace capabilities, directed energy weapons, on-orbit capabilities and ground-based antisatellite missiles that can achieve a range of reversible to non-reversible effects.
DIA’s “Challenges to Security in Space” report is available here:

The Definitive Career Guide for Entrepreneurial Space declares that the commercial space revolution is here, and it’s hungry for talent.
Offered by Space Angels, a source of capital for early-stage space ventures, the guide is authored by Justus Kilian and Jessica Holland.
“We’ve created this guide to give you concrete steps to start your journey towards a career in space now,” they explain.
Radical transformation
As detailed in the guide:
“The space industry is in the midst of a radical transformation. When SpaceX started launching its rockets a decade ago–making it far easier for commercial space startups to enter the market–it triggered a wave of entrepreneurial innovation. Today, Space is a $400B market that touches every aspect of our lives, from location-based services to global finance. The next generation of space technology will be responsible for delivering global internet, fighting climate change, and taking humanity to Mars.”

Credit: SpaceX
“To accomplish such audacious goals, the industry will require talent with diverse skills and backgrounds from every walk of life. We spoke with the most influential companies and leaders across entrepreneurial space, who were generous in sharing detailed practical advice, big-picture guidance, and the stories of their own careers.”
Career tips
The guide carries a number of career tips, offered by individuals deep into their own space professions.
To download the guide, go to:
For detailed information on Space Angels, go to:
Curiosity Front Hazcam Right A photo taken on Sol 2316, February 10, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2317 tasks.
“Curiosity is driving across the clay-bearing unit, which is still a very new terrain with many details yet to be understood,” reports Susanne Schwenzer, a planetary geologist at The Open University, Milton Keynes in the U.K. “The region is covered in little pebbles – and has lots of small sand patches, too, both of which we continue to investigate.”
Curiosity Navcam Right A image acquired on Sol 2316, February 10, 2019.
Credit: NASA/JPL-Caltec
Little further north
A recent drive by the robot moved it a little further north – to be exact, Curiosity drove 95 feet (39 meters from its last location.
“The parking location presented us with the same pebbly-strewn surface as before, with the occasional small sand feature,” Schwenzer adds. With this terrain being new, and some small-scale sedimentary features spotted by the eagle-eyed sedimentologists on the team, there was a decision to use Curiosity’s Chemistry and Camera (ChemCam) on three pebbly targets, “Dauntless,” “Otter,” and Thistle.”
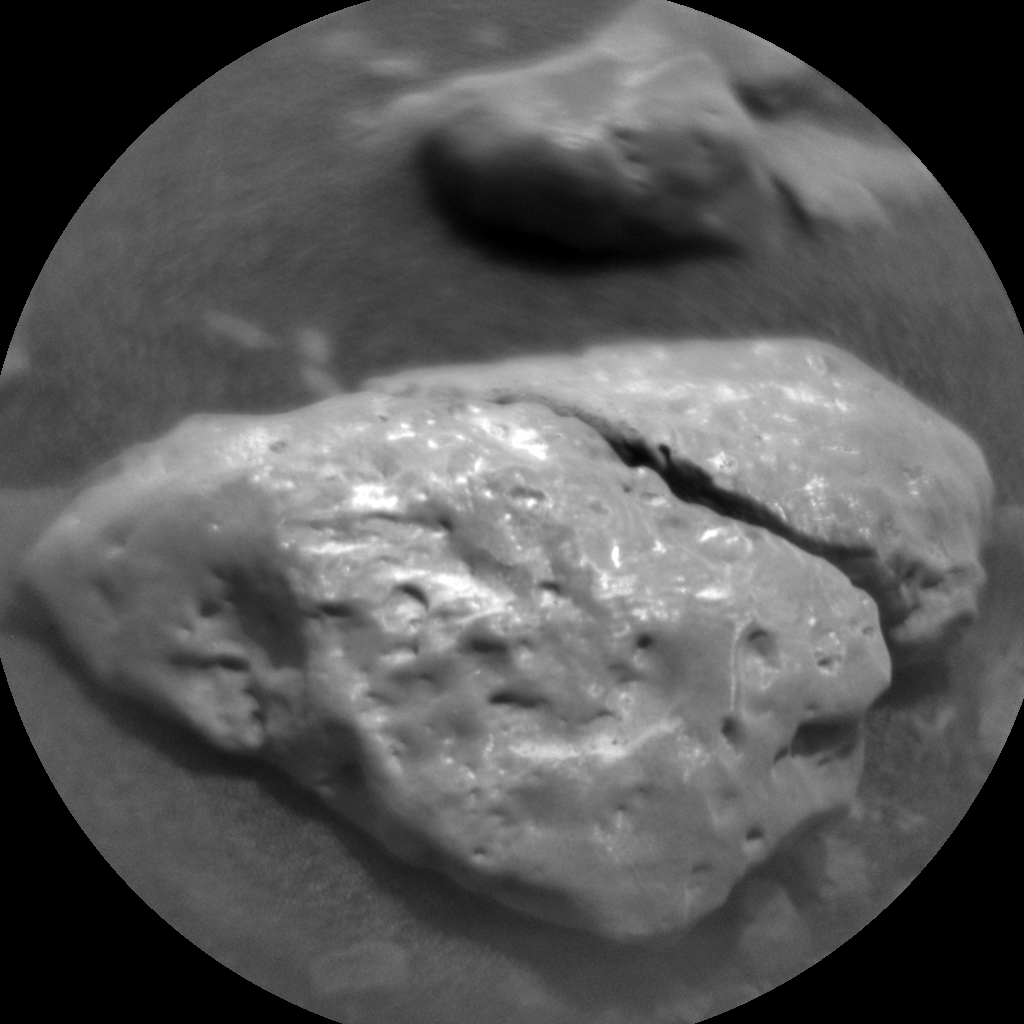
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2316, February 10, 2019.
Credit: NASA/JPL-Caltech/LANL
Large pebble
The team also found – for the first time in this new unit – a pebble large enough to get a full Alpha Particle X-Ray Spectrometer (APXS) raster on one continuous piece of rock.
“Yes, this is how small the pebbles are! We used the opportunity, named the target “Emerald,” and investigated it using a 3-spot APXS raster, accompanied by [Mars Hand Lens Imager] MAHLI observations on this target.
Explains Schwenzer: To put all the small pieces into context, scientists planned a large Mastcam multispectral raster investigation covering the workspace in front of the rover, and including the targets “Dauntless,” “Faoilean” (a sand patch), and the APXS target “Emerald.” That plan also covers some of the sedimentary details that were spotted in the post drive imaging. Two further Mastcam observations target aeolian features (target “River Brora”) and a small ridge ahead of the rover, named “Osprey.”

Curiosity Navcam Left A image taken on Sol 2316, February 10, 2019.
Credit: NASA/JPL-Caltech
Declining dust event
Mars environmental researchers included atmospheric opacity measurements with both Mastcam and Navcam, as well as cloud observation movies and a dust-devil survey in the weekly morning suite.

Curiosity Mars Hand Lens Imager (MAHLI) produced on Sol 2316, February 10, 2019. MAHLI, located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
“Now that the regional dust event has declined,” Schwenzer points out, “we are seeing an uptick in dust devils!”
A rover drive is targeted towards a small outcrop – the largest piece of continuous rock so far seen in the new terrain.
“Go, Curiosity, geo-minded Earthlings will love to get close and personal to an outcrop soon again!,” Schwenzer concludes.
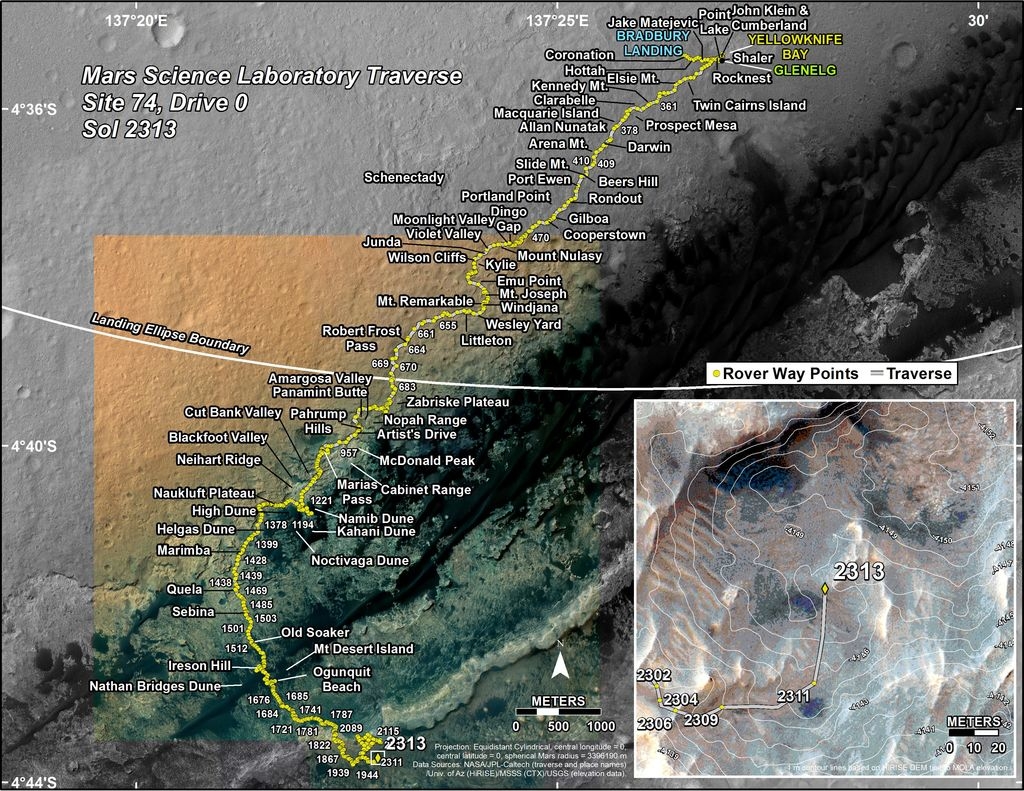
Credit: NASA/JPL-Caltech/Univ. of Arizona
New road map
Meanwhile, a new Curiosity traverse map through Sol 2313 has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2313 Martian day, or sol, of the rover’s mission on Mars (February 08, 2019).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2311 to Sol 2313, Curiosity had driven a straight line distance of about 127.94 feet (38.99 meters), bringing the rover’s total odometry for the mission to 12.53 miles (20.16 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

