Credit: ESA
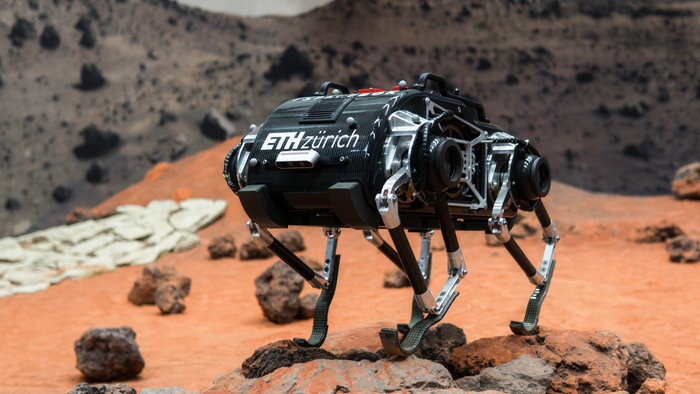
The walking and hopping quadruped robot is currently being tested in the European Space Agency’s (ESA) Mars Yard.
“Legged robots can traverse unstructured terrain and could be used to explore areas of interest, such as craters, which rovers are unable to reach,” explains team member Patrick Barton. “As they are very versatile, they can change gait to adapt to different terrain.”
SpaceBok has been designed by a Swiss student team from ETH Zurich and ZHAW Zurich, under the supervision of Professor Marco Hutter and PhD student Hendrik Kolvenbach.
Built for hopping
SpaceBok is primarily built for hopping and on the Moon the robot could reach a height of four meters off the lunar terrain. “This would allow for a fast and efficient way of moving forward,” says team member Elias Hampp in an ESA press statement.
In low gravity environments hopping proves to be energetically more efficient than walking.
The aim of the research effort is to build a jumping robot capable of overcoming large obstacles and thus increase the operation range of mobile robots for data collection.
To see SpaceBok in action, go to this video:

