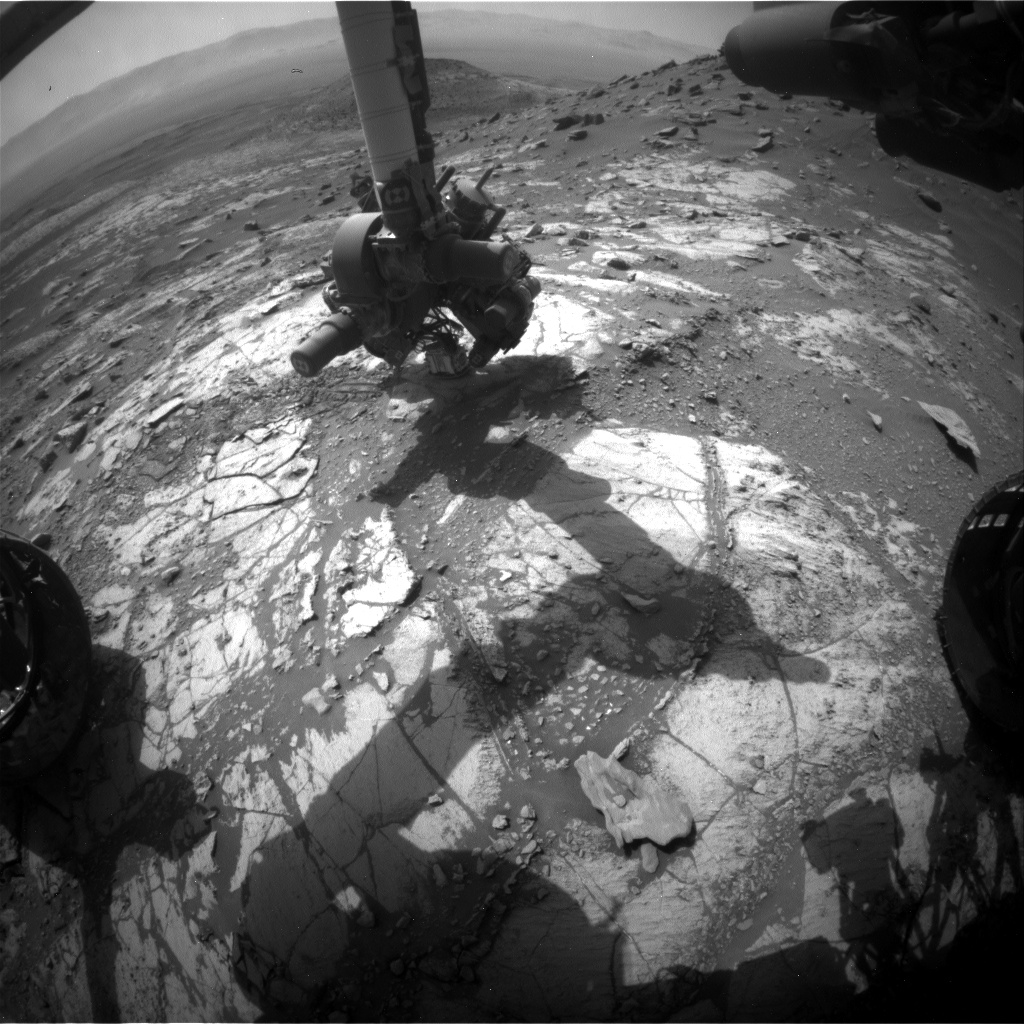
Curiosity Front Hazard Avoidance Camera Right B image taken on Sol 2665, February 4, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2666 duties.
Mars scientists are scoping out new assignments for the rover, notes Claire Newman, an atmospheric scientist at Aeolis Research in Pasadena, California.
There were three options at the start of planning:
(1) Stay put and prepare to drill;
(2) Do a “bump” to get into a better position to drill; and
(3) Perform a longer drive to find a better location.
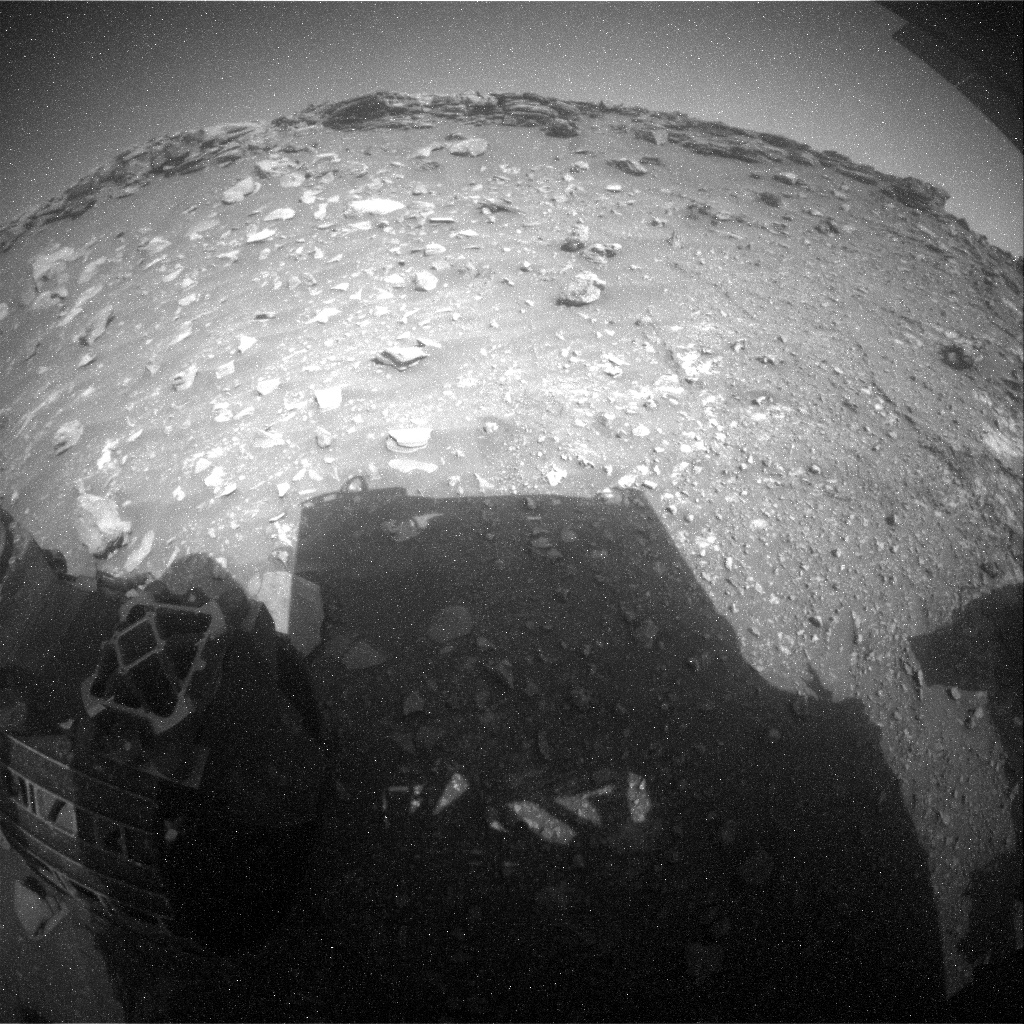
Curiosity Rear Hazard Avoidance Camera Left B photo taken on Sol 2665, February 4, 2020.
Credit: NASA/JPL-Caltech
Significant tilt
“The issue with (1) was that, while the drive over the weekend left Curiosity in front of a very interesting outcrop, it also left the rover with significant tilt. So it was initially unclear whether we would pass the Slip Risk Assessment Process (SRAP), as required to be able to drill here,” Newman reports.

Curiosity Right B Navigation Camera image taken on Sol 2665, February 4, 2020.
Credit: NASA/JPL-Caltech
“For this reason, both the GEO (geology) and ENV (environmental) science theme groups had to come up with a few different plans! Due to power and other constraints, the science block was only 37 minutes long, which didn’t leave enough time to do ChemCam [Chemistry and Camera] activities as well as everything else,” Newman adds.

Curiosity Left B Navigation Camera image taken on Sol 2665, February 4, 2020.
Credit: NASA/JPL-Caltech
Close to the contact
However, this location is of great interest for ChemCam, Newman explains, because it’s close to the contact between the Greenheugh Pediment and Murray formation, hence chemical analysis could reveal important information on processes affecting the rocks immediately beneath Mount Sharp’s capping unit.
“The ENV group and Mastcam therefore agreed to give up all of our activities to ChemCam if we were going to immediately drive away (option 3). If, however, we were going to stay put or ‘bump’ (options 1 and 2),” Newman continues, “we decided that ENV and Mastcam activities would take up all of the time, leaving the ChemCam activities until a later sol.”
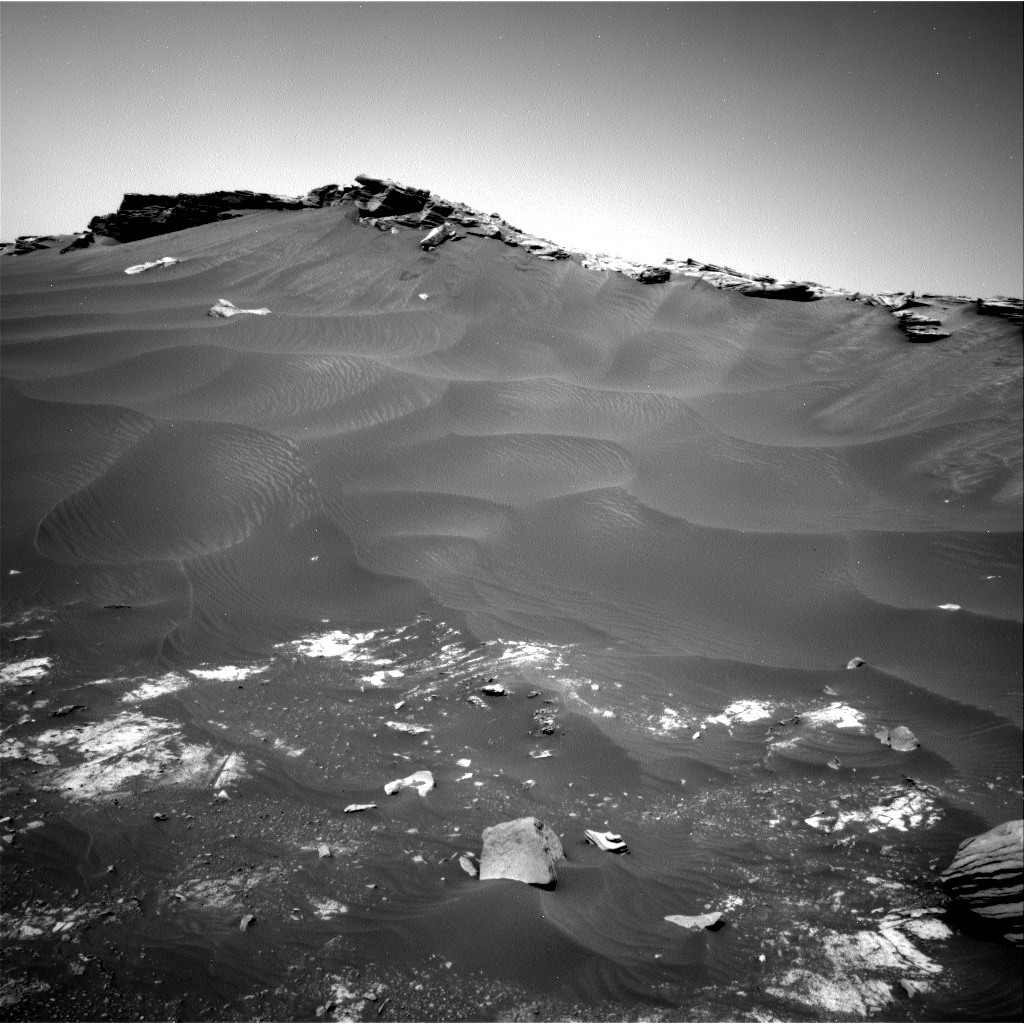
Curiosity Right B Navigation Camera photo taken on Sol 2664, February 3, 2020.
Credit: NASA/JPL-Caltech
Even then, the science activities varied depending on whether Curiosity stayed put or moved a little. For example, ENV dust devil movies are ideally taken during a period with Rover Environmental Monitoring Station (REMS) coverage, because then scientists can compare any imaged dust devils (dusty vortices) with measurements of vortex pressure drops made by REMS.
“The ‘stay put’ plan (option 1) had the science block at about 2pm local true solar time on Mars, which was covered by REMS; however, the ‘bump’ plan (option 2) had the science block earlier, during a period with no REMS coverage. So if we went with option 2, we would have pulled the dust devil movie to make room for other activities,” Newman says.
Stay put
In the end, scientists discovered that the rover had passed SRAP and we would be staying put to drill (option 1).
“We therefore stuck with our bevy of ENV and GEO Mastcam activities,” Newman explains. “For ENV, these included a Suprahorizon cloud movie (looking for clouds above the north crater rim), a Navcam dust devil movie, and a Navcam ‘line of sight’ measurement of the dustiness across the crater.”
ENV activities were somewhat limited, as many of them rely on being able to image some distance away (e.g. to look for dust devils in all directions or to look for cloud shadows on Mount Sharp), whereas we are surrounded by high topography in many directions at this location.
Potential drill target
For GEO, activities included Alpha Particle X-Ray Spectrometer (APXS) of the potential drill target “Hutton,” followed by Dust Removal Tool (DRT) use, then a center and offset APXS on the potential drill spot.
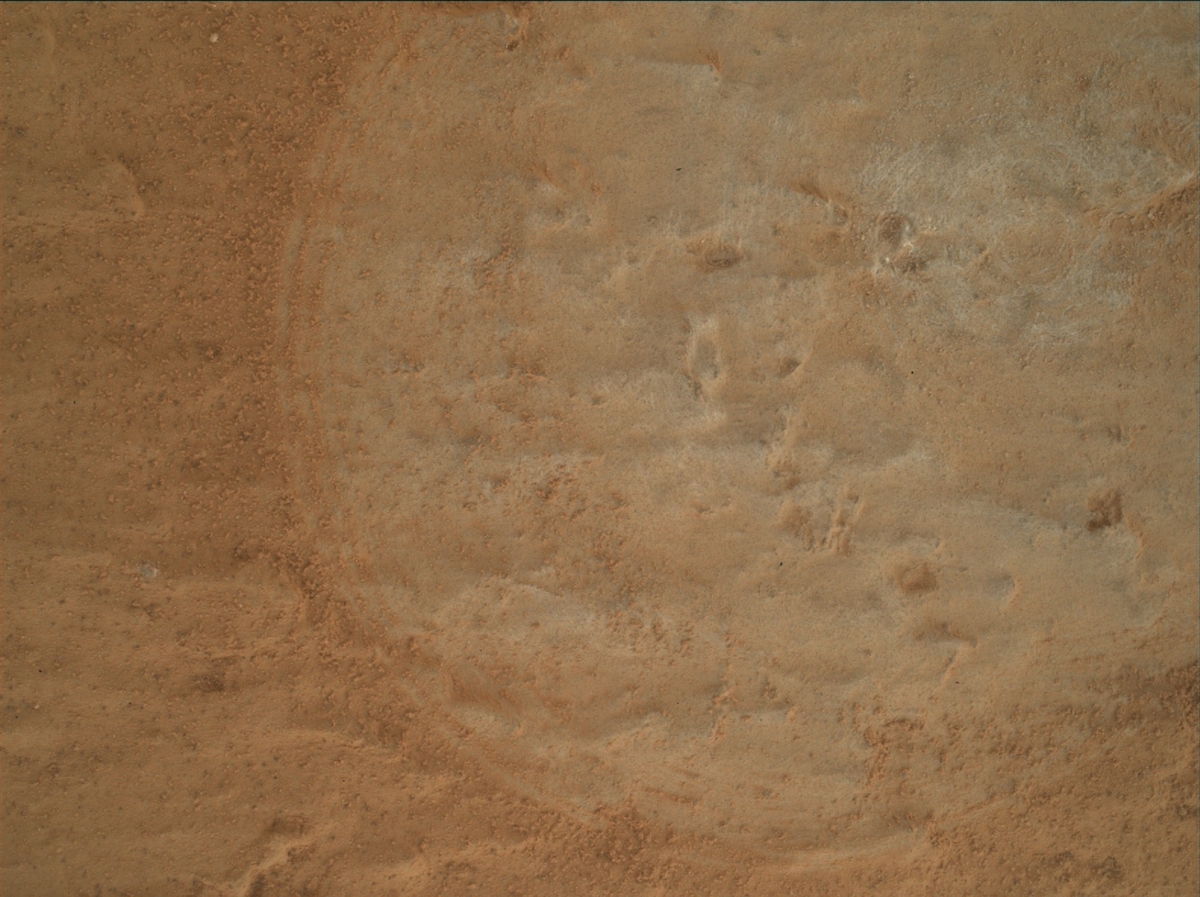
Dust Removal Tool (DRT) result. Curiosity Mars Hand Lens Imager photo produced on Sol 2665, February 4, 2020.
Credit: NASA/JPL-Caltech/MSSS
Also in the plan, a Mastcam mosaic of the top of “Tower Butte” to document sedimentologic structures, a Mastcam observation of a light-toned target named “Dumfriesshire,” and finally Mastcam on a on a portion of the bedrock that had been scuffed by the rover’s wheel, to look for surface changes.
“The latter will be used to infer wind strength and direction at our current location,” Newman concludes, “which is valuable both for comparison with Mars atmospheric models and to determine the risk of drill samples being blown away.”

