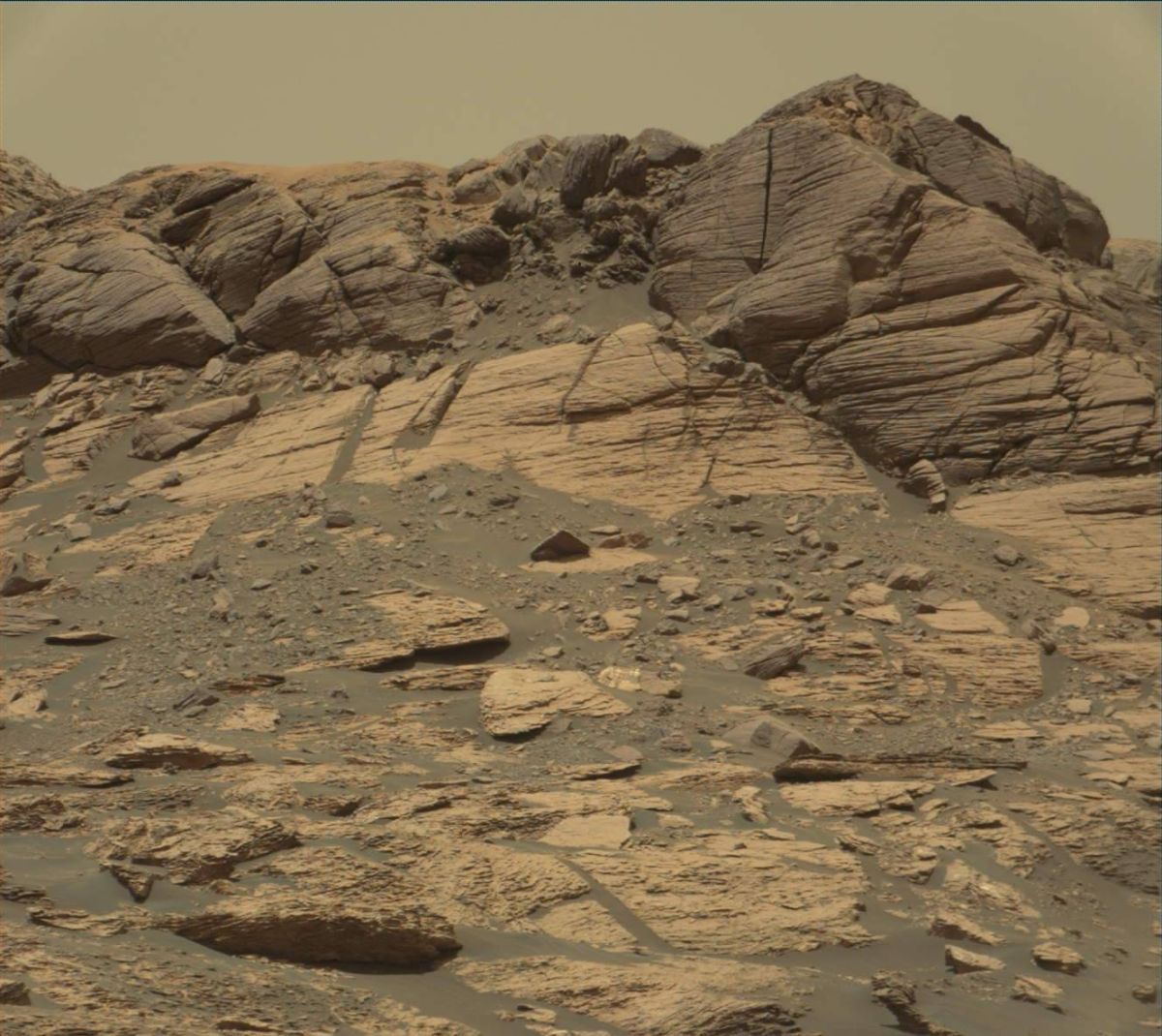
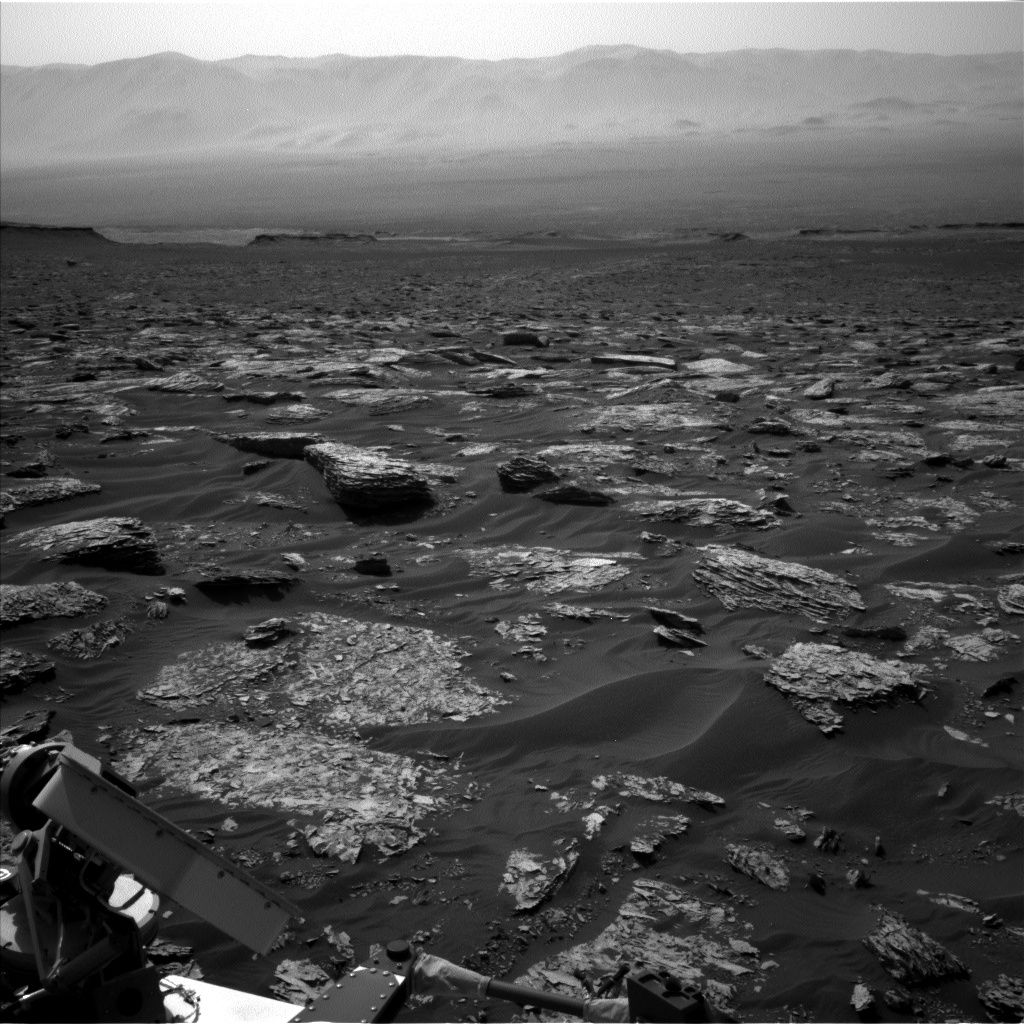
Curiosity Mastcam Right image taken on Sol 1727, June 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
The Curiosity Mars rover is now performing Sol 1729 science duties.
A drive by the NASA robot on Sol 1728 was successful, reports Abigail Fraeman, a planetary geologist at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California. “Our weekend plan will be chock-full of activities.”
Colorful workspace
On the first sol, Curiosity will do some contact science on a “rather colorful workspace that is currently in front of the rover,” adds Fraeman.
The schedule involves collecting Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) observations of two targets: “Frazer Creek” and “Lurvey Spring.”
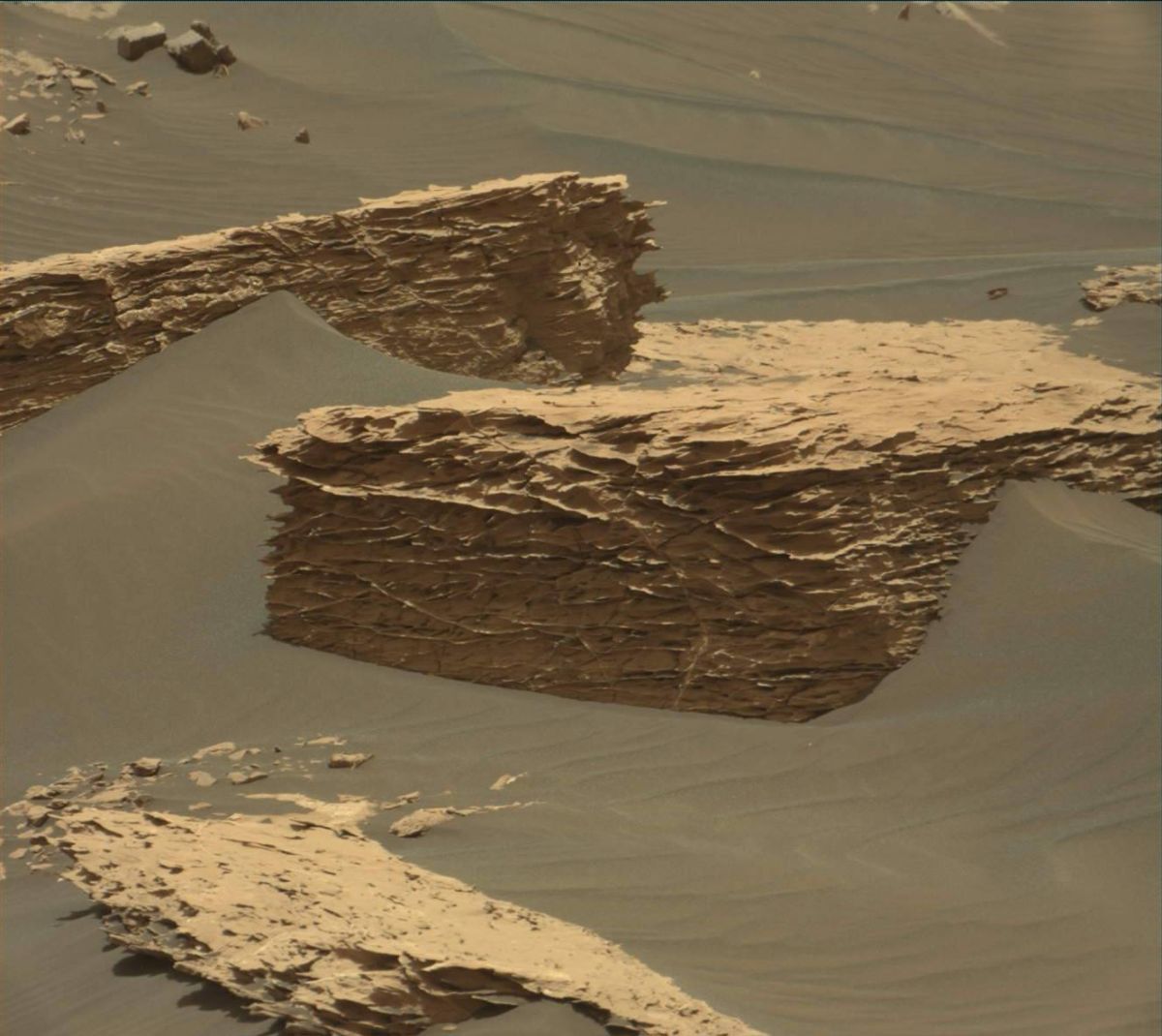
Curiosity Mastcam Right image taken on Sol 1727, June 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
Also planned is carrying out Chemistry and Camera (ChemCam) observations of “Mark Island” and “Frazer Creek” plus the corresponding Mastcam documentation images of these targets.
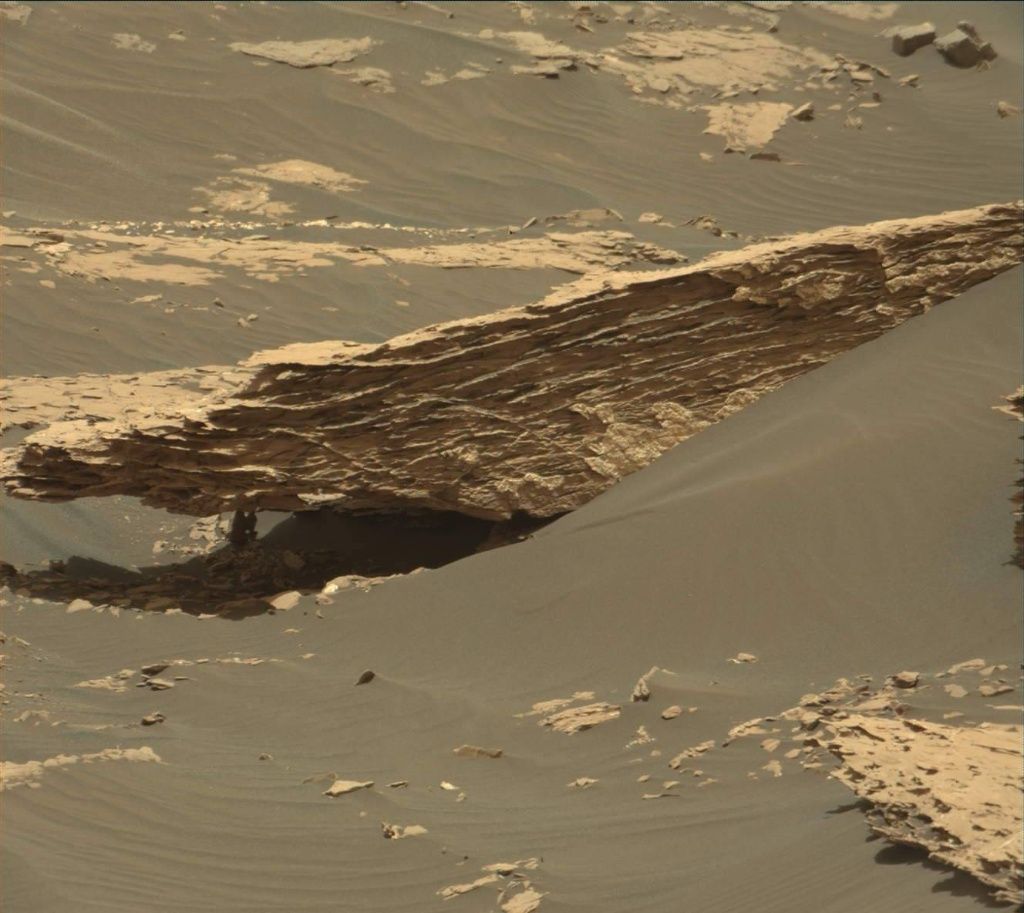
Curiosity Mastcam Right image taken on Sol 1727, June 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
In addition, full multispectral filter Mastcam observation of Mark Island, as well as additional Mastcam images of targets “Big Spencer Mountain” and “Monument Cove” will be done.
Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1728, June 16, 2017.
Credit: NASA/JPL-Caltech/LANL
Phobos observations
“Curiosity will wake up around three in the morning between the first and second sols of the plan to make a special observation of Mars’ moon Phobos,” Fraeman notes. “We are going to watch Phobos as it emerges from Mars’ shadow into sunlight. This will help us measure the amount and size of dust particles in Mars’ upper atmosphere.”
After the Sun rises on the second sol of the weekend plan, Fraeman continues, the rover will conduct full MAHLI wheel imaging. “We take images of our wheels using MAHLI throughout a full wheel rotation every few hundred meters to track the rate of wheel damage.”
Curiosity Navcam Left B image acquired on Sol 1728, June 16, 2017.
Credit: NASA/JPL-Caltech

Curiosity Navcam Left B image acquired on Sol 1728, June 16, 2017.
Credit: NASA/JPL-Caltech
Imaging stops
On the third sol of the plan, the robot is slated to drive and have a post-drive ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observation and dust devil search.
Fraeman says that this Curiosity drive will place it roughly 115 feet (35 meters) closer to the second Vera Rubin Ridge approach-imaging stop.
The data Curiosity collected during the first imaging stop earlier in the week,” Fraeman explains, have been coming down over the last few days, and they look absolutely spectacular.
Fine scale details
“I mapped Vera Rubin Ridge using orbital data as part of my PhD thesis five years ago,” Fraeman adds, “so it has been so exciting for me to see these images after staring at the area from above for so long.”
The fine scale details that the robot is able to collect with its instruments “will help us understand how Vera Rubin Ridge formed and any implications for past habitable environments at Gale Crater,” Fraeman concludes.
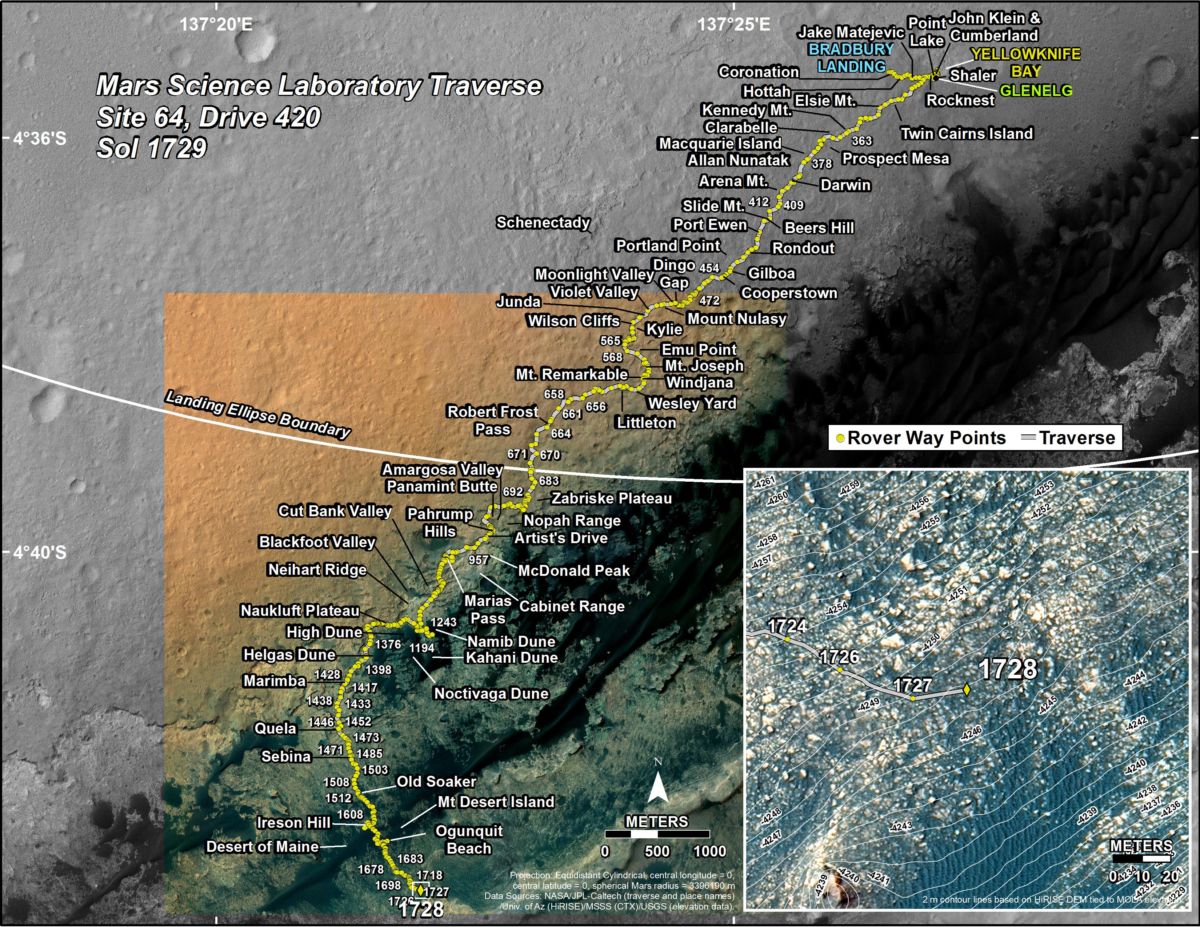
Credit: NASA/JPL-Caltech/University of Arizona
New road map
A new Curiosity traverse map through Sol 1728 has been posted.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1728 Martian day, or sol, of the rover’s mission on Mars (June 16, 2017). Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1727 to Sol 1728, Curiosity had driven a straight line distance of about 63.00 feet (19.20 meters), bringing the rover’s total odometry for the mission to 10.40 miles (16.74 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

