Archive for the ‘Space News’ Category

A unique panel of experts will tackle Thursday, October 8 just how are private companies and technology changing the way we get to and operate in space.
Tune in October 8 from 9:00 AM – 11:30 AM Eastern Standard Time.
New space economy
Where is the commercial space sector headed?
What challenges remain that must be overcome?

The 3D Printer during testing in the Microgravity Science Glovebox (MSG) Engineering Unit at Marshall Space Flight Center.
Credit: NASA
In an era in which NASA is manufacturing new parts mid-flight via 3-D printer, how are innovations creating a new space economy, and how will manufacturing and digitalization take shape in the last frontier?
The Atlantic | AtlanticLIVE | TheAtlantic.com stage the event: “Bold Bets: Commercializing the Cosmos.”
Shrinking government budgets
The Atlantic will survey a shifting landscape in which public and private partnerships are filling a void left by shrinking government budgets, new technologies are being developed to usher in the era of in-space manufacturing and the world is looking to the future of commercial spaceflight.
In an era in which NASA is manufacturing new parts in space via 3-D printer, how are innovations like additive manufacturing and digitalization shaping and creating a new space economy?
Being held at The Biltmore in Atlanta, Georgia, panel discussions are:
— The Commercialization and Personalization of Space
— The Future of Space Exploration

Experts on tap
Taking part in the program: Salvatore T. “Tory” Bruno, President and Chief Executive Officer, United Launch Alliance (ULA); George Nield, Associate Administrator for Commercial Space Transportation, Federal Aviation Administration, John Roth, Vice President Business Development, SNC Space Systems and Frank Slazer, Vice President of Space Systems, Aerospace Industries Association.
Also onboard, Steve Justice, Director, Georgia Center of Innovation for Aerospace; Michael Paul, Mission Director and Space Systems Engineer, Penn State Lunar Lion Program and Applied Research Laboratory, Pennsylvania State University; Eric Spiegel, President and CEO, Siemens USA; and Jilda Garton, Vice President, Research and General Manager, Georgia Institute of Technology Applied Research Corporation.
The program concludes with a “Headline Interview” with NASA’s Ellen Stofan, Chief Scientist.
Live stream details
Tune in October 8, 9:00 AM – 11:30 AM Eastern Standard Time.
Annie Bruce of TheAtlantic.com told Inside Outer Space that individuals can view the conference via live stream at a special website here:
http://www.theatlantic.com/live/events/bold-bets5/2015/
There will also be videos posted online afterwards, if participants are not able to tune in live, Bruce added.
Underwriter of this event is Siemens.
In the series of Past Bold Bets, the topics involved: Future of Manufacturing; Tomorrow’s Industrial Entrepreneurship (And How Everything Will Change); Fast Forward to the Connected City; and California on the Move?

Credit: World Space Week/2015
In honor of World Space Week, astronaut Buzz Aldrin shared his dream for the future of space travel with AOL.com.
“For my part, I have been blueprinting a vision for the Red Planet: Establishing Cycling Pathways to Occupy Mars,” explains Aldrin.

Onward to Mars! Generational space explorers!
Credit: Christina Korp
“When I look into the coming years, I envision a sequential buildup of a cycling spaceship network. The Earth, the Moon, and Mars become interlaced and will be a busy nucleus of people, cargo and commerce that navigate throughout the inner Solar System,” Aldrin says.
For the entire story and Aldrin’s unique perspective, go to:
Buzz Aldrin: “Earth isn’t the only world for us anymore”

Carol Armstrong, ship sponsor for the Auxiliary General Oceanographic Research (AGOR) research vessel (R/V) Neil Armstrong (AGOR 27), breaks a bottle across ship’s bow during a March 2014 christening ceremony at Dakota Creek Industries, Inc. shipyard in Anacortes, Washington. Joining Armstrong on the platform are Rear Adm. Matthew Klunder, left, chief of naval research, Mr. Dick Nelson, president, Dakota Creek Industries, Inc., and Kali Armstrong, granddaughter of the late astronaut.
Credit: U.S. Navy photo by John F. Williams
The Office of Naval Research (ONR) has delivered a state-of-the-art research vessel – the R/V Neil Armstrong — to the Woods Hole Oceanographic Institution in Massachusetts.
The ship is outfitted to carry out scientific studies of the marine environment.
Last month, the Dakota Creek Industries shipyard in Anacortes, Washington delivered R/V Neil Armstrong to the oceanographic institute – a private, nonprofit organization dedicated to marine research.
The research vessel successfully completed acceptance trials last August, the Navy reported.
According to the ONR, the R/V Neil Armstrong will replace the Navy-owned R/V Knorr, which Woods Holehas operated since 1970. The Knorr served as the command ship during the discovery of the deep ocean thermal vents (nicknamed “black smokers”) in 1977 and the wreck of the RMS Titanic in 1985.

Tam O’Shaughnessy, ship’s sponsor for the auxiliary general oceanographic research (AGOR) vessel R/V Sally Ride (AGOR 28), breaks a bottle across the bow during a christening ceremony in August 2014 at the Dakota Creek Industries, Inc., shipyard in Anacortes, Washington.
Joining O’Shaughnessy on the platform are Dick Nelson, president, Dakota Creek Industries, Inc., Matron of Honor, the reverend Dr. Bear Ride, Matron of Honor, Kathleen Ritzman, assistant director, Scripps Institution of Oceanography, University of California San Diego, Kathryn Sullivan, undersecretary of commerce for oceans and atmosphere and administrator, National Oceanic and Atmospheric Administration, and Rear Adm. Matthew Klunder, chief of naval research.
Credit: U.S. Navy photo by John F. Williams
Neil Armstrong and its sister ship, R/V Sally Ride (AGOR-28), will conduct coastal and deep ocean research with oceanographic research organizations under charter agreements, according to Megan Eckstein at U.S. Naval Institute News.
Range of scientific studies
A deep-ocean, general-purpose research vessel used for a wide range of scientific studies, the R/V Neil Armstrong will study ocean chemistry and geology, underwater acoustics, marine biology and ecosystem management, and marine technology development.
The 238-foot vessel can sail on cruises as long as 40 days and accommodate both a 20-person crew and up to 24 scientists.
R/V Neil Armstrong has multi-beam bottom-mapping sonar, advanced meteorological sensors and satellite data transmission systems. It also features the latest navigation and ship-positioning systems and a specially designed hull that improves sonar acoustic sensing.
The R/V Neil Armstrong “will provide a continuum of exploration for the next 50 years,” said Carol Armstrong, the astronaut’s widow and sponsor of the ship,” during March 29, 2014 christening ceremonies of the Navy’s newest research ship.
According to the Woods Hole’s Oceanographic Institution website, they will contribute $350,000 annually toward the operation and maintenance of R/V Neil Armstrong. In exchange, its scientists will receive preferential access to the ship schedule for about ten days a year.
Shake-down cruises
Now at Woods Hole, the ship is in for a month of being outfitted with equipment, spare parts, food and other supplies needed for research cruises.
It will then embark on “shake-down” cruises: a transit through the Panama Canal and maintenance on the East Coast; the ship’s science equipment will be installed, such as a high-tech sonar system and other ocean sensors.
Early in 2016, the R/V Neil Armstrong will undergo a series of science verification cruises to test its installed mission systems and ensure its readiness for conducting research missions.
The ship’s first science mission is planned for May 2016 in the North Atlantic.
Sister ship
Neil Armstrong, the first man to walk on the Moon in 1969, also served as a naval aviator flying nearly 80 combat missions during the Korean War.
The late Sally Ride was America’s first woman space traveler in 1983.
The R/V Sally Ride will collaborate with scientists at the Scripps Institution of Oceanography at University of California San Diego – where Ride worked as a professor and scientist during her career.

“The Martian” – Mark Watney
Credit: 2015 Twentieth Century Fox
Every step you take!
Thanks to Scientists from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) you can view the steps of NASA astronaut Mark Watney in the new movie blockbuster: “The Martian.”
DLR experts typically use their talents producing highly accurate topographical maps of Mars.

The route that Mark Watney in “The Martian” had to take to have a chance of being rescued is thousands of miles long. He had to abandon his Mars station in Chryse Planitia and go through Mawrth Vallis (right of centre) in the Martian highlands.
By the way, Mawrth Vallis is one of the potential choices for the landing module of the ESA ExoMars mission.
Credit: ESA/DLR/FU Berlin – CC BY-SA 3.0 IGO
Spectacular Mars terrain
But this time they reconstructed Watney’s route using stereo image data acquired by the High Resolution Stereo Camera (HRSC) on board the European Space Agency’s Mars Express spacecraft.
They then compiled this data into a 3D film that shows the spectacular landscape that the protagonist would see “in the future.”
Maps of this kind are the foundation of all scientific work relating to Mars.

The route of ‘The Martian’ – from Chryse Planitia over Arabia Terra in the Martian highlands to Ares 4.
Credit: ESA/DLR/FU Berlin – CC BY-SA 3.0 IGO
Schiaparelli Crater
For almost 12 years, the DLR Institute of Planetary Research has been using image data acquired by HRSC to produce digital terrain models of the surface of Mars. The Berlin-based DLR Institute is a world leader in the field of planetary surveying and mapping.
In the movie, astronaut Watney endeavors to reach the Ares 4 rocket that NASA had “parked” in Schiaparelli Crater and to use it to leave Mars.
DLR scientists recently presented a broad swath of this terrain – roughly two-and-a-half million square kilometers of precisely mapped landscape that covers the areas described.
This data was released as part of a project to map the entire surface of Mars.

The last hurdle for Mark Watney in the hit movie, “The Martian” – the edge of Schiaparelli crater. Schiaparelli crater is located in the eastern Terra Meridiani region of the equator of Mars. This topographical map shows that the terrain is steep in places and therefore, dangerous for ‘The Martian’ Mark Watney and his fragile vehicle. Based on topographical data, he had to find the least steep route possible.
Credit: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
Travel map
“Thanks to this animation, we have even noticed a few new details that we had not seen in a larger spatial context,” explains Ralf Jaumann from the DLR Institute of Planetary Research, Principal Investigator for the High Resolution Stereo Camera.
“That is why we made the film – it helps everyone see what it would be like for Watney to travel through these areas… the clouds were the only creative touches we added, because, fortunately, they do not appear in the HRSC data.”
Take a video view of this unique product at:
https://www.youtube.com/watch?v=Opg6x4IKE3Y

Credit: 2015 Twentieth Century Fox
Update:
Stranded astronaut Mark Watney spends most of his time at the “Ares 3” site in southern Acidalia Planitia. The book describes Acidalia as flat and easy to drive over; he even drives to the Pathfinder landing site and back.
This region of Mars is actually far more diverse, interesting, and hazardous to drive over than depicted in the novel.
Views of several sites, and other locations pertinent to the fictional story, are in the latest weekly release of images from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter.
They are available online at http://uahirise.org/martian
Or go to:

This composite image looks toward the higher regions of Mount Sharp within Gale Crater,
Credit: NASA/JPL-Caltech
This composite image looking toward the higher regions of Mount Sharp within Gale Crater was taken on September 9, 2015 by NASA’s Curiosity Mars rover and released by the Jet Propulsion Laboratory (JPL) last week.
In the foreground — about 2 miles (3 kilometers) from the rover — is a long ridge teeming with hematite, an iron oxide. Just beyond is an undulating plain rich in clay minerals. And just beyond in this photo re a multitude of rounded buttes – all high in sulfate minerals.
Further back in the image are striking, light-toned cliffs in rock that may have formed in drier times and now is heavily eroded by winds.
“The changing mineralogy in these layers of Mount Sharp suggests a changing environment in early Mars, though all involve exposure to water billions of years ago,” explains the JPL Curiosity website.
Grey Mars
It may not be 50 shades of grey.

Grey Mars as imaged by Curiosity’s Mastcam Right, snapped on September 30, 2015, Sol 1120.
Credit: NASA/JPL-Caltech/MSSS
But I asked noted Marsologist, Chris McKay at the NASA Ames Research Center in California about “the greying of Mars” – what’s going on?
“I list the ‘grey Mars’ as one of the four major results of Curiosity – nitrates, fluoride, meteroritic-like organics are the other three,” McKay told Inside Outer Space.
McKay said that virtually all other Mars missions have only accessed the surface of “red Mars.”
Mars stinks!
“The non-porous mudstone at Gale Crater has provided a way to easily reach ‘grey Mars’…even with the rather wimpy drill on Curiosity,” McKay said.
As expected, McKay points out, grey Mars releases Hydrogen sulfide (H2S) when heated and it smells like rotten eggs.
“Unexpectedly it is low in organics — although some are found in Cumberland and has perchlorate,” McKay notes. “I think this is due to cosmic radiation and implies that we need to drill deeper to find pristine grey Mars – probably 16 feet (5 meters) deep at the Yellowknife Bay site.”
Methane measurement
In related news about the new drill hole and tailings: The weekend plan called for an after dusk use of the Mars Hand Lens Imager (MAHLI). That instrument will make use of its LEDs to look inside of the drill hole and image the drill tailings.

This image was taken by ChemCam: Remote Micro-Imager onboard NASA’s Mars rover Curiosity on October 4, 2015, Sol 1123.
ChemCam fires a laser and analyzes the elemental composition of vaporized materials from areas smaller than 1 millimeter on the surface of Martian rocks and soils.
Credit: NASA/JPL-Caltech/LANL
That operation is to be followed by use of the Alpha Particle X-Ray Spectrometer (APXS) and placing that device over the tailings for an overnight measurement.
MAHLI is also slated to image the pre-sieve dump pile and APXS will be placed over it for another overnight integration.
The Sample Analysis at Mars (SAM) Instrument Suite is to be used for an atmospheric methane measurement. SAM is being put to use because Mars recently went through the path of comet Damocles.
“Dust ejected from comets is often carbon-rich, and therefore is a possible source of the elevated methane concentration that has occasionally been observed by SAM,” explains Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.

Credit: Space Telescope Science Institute
Survey information by YouGov research reveals that majorities of the public in Britain, Germany and the U.S. believe that living creatures who have the ability to communicate and do not come from Earth do exist.
“You are not alone: most people believe that aliens exist” is the title of the YouGov data set posted last month by the group’s Will Dahlgreen.

Fermi Paradox: Where are they?
YouGov notes that Stephen Hawking has described the search for extra-terrestrial life as “the most exciting quest in 21st-century science” and backed a new project, the Breakthrough Initiative. It is the largest effort yet to search for alien intelligence.
A particularly interesting aspect of the research focuses on the Fermi Paradox.
The Fermi Paradox explores the idea that the lack of evidence for intelligent life contradicts the incredibly low chance that ours is the only planet where it exists in the 1,000,000,000,000,000,000,000,000 planet universe.
Among Americans who believe in extra-terrestrial life, backwards human technology (42%) is the reason why we have not contacted other intelligent life forms, YouGov finds.

Concealing contact
As noted in the research, one conspiratorial possibility is that we have contacted intelligent life but the government has covered it up.
Nearly a third of Americans (30%) believe that the government has deliberately concealed contact with aliens from us.
The research also looks into the recently announced project by the Breakthrough Initiative that aims to send a digital message describing life on Earth to other intelligent civilizations distant from our planet.
“Scientists are now unsure on whether they should contact extra-terrestrial intelligent life,” observes YouGov.
Digital message
“The question still remains of whether it’s a good idea to even try to contact alien life – Hollywood at least would suggest it probably is not,” the YouGov research explains.

Green Bank Telescope (GBT) will join in the search, receiving roughly $2 million per year for 5 years. The 100-meter GBT is the world’s largest fully steerable radio telescope, located in West Virginia.
Credit: NSF
The YouGov question asked: On balance, do you think the digital message should be sent?
Their finding: Americans tend to say we should send a digital message describing life on Earth to other civilizations.
However, (43% say we should, 31% say we should not) and men (48%) are more supportive on the idea than women (39%).
Resources
YouGov is a leading online market research company based in the UK.
“Our mission is to supply a live stream of continuous and accurate data and insight into what people are thinking and doing all over the world, all of the time, so that companies, governments and institutions can better serve the people that sustain them.”
The new research on ET contact involved a sample of 1,000 adult interviews carried out September 14 – 16, 2015.
For full details on this intriguing YouGov ET survey, go to:
https://today.yougov.com/news/2015/09/28/you-are-not-alone-most-people-believe-aliens-exist/
Also go to:
Breakthrough Search for ET: A “Major Escalation” in Looking for Other Starfolk

Big Sky drilling result. NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on September 29, 2015, Sol 1119 of the Mars Science Laboratory Mission.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover has entered Sol 1122, landing on the Red Planet back in August 2012.
Operators of the Mars machinery are reporting success in using the rover’s drill on “Big Sky.”
It went perfectly, reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona and a member of the ChemCam team on the Mars Science Laboratory mission.
Minerals on Mars
The plan called for the rover to transfer some of the powder from Big Sky to the Chemistry and Mineralogy instrument, or CheMin for short. That instrument is built to identify and measure the abundances of various minerals on Mars.
Also on Sol 1121, the Chemistry & Camera (ChemCam) was slated to observe the target “Minnekahta.”
The rover’s Mastcam was scheduled to document the ChemCam location and also take a picture of the location on the ground where Big Sky material will be dumped, Anderson explains.
Search for clouds
On Sol 1122, Anderson said ChemCam would observe targets “Kippen,” “Kalispell,” and “Big Snowies.”
Anderson adds that Mastcam is to document these targets and take a 4×1 mosaic of the lower portion of Mt. Sharp. Also, Navcam will be used to take a movie about the northern rim of Gale crater to search for any clouds.
“We are all eagerly looking forward to the CheMin results from Big Sky,” Anderson concludes, “to compare with our previous results from ‘Buckskin!’”
Implementation of planned rover activity is subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Inventor Dan Slater uses Remote Acoustic Sensor (RAS) technology during a test firing of the five-segment rocket motor headed for use on NASA’s Space Launch System booster.
Credit: Sandy Slater
A novel technique is being tested to visually and audio-record scenes ranging from exo-atmospheric rocket events to microbial life on other worlds.
Tagged as a Remote Acoustic Sensor (RAS), this new type of technology is suitable for use on rockets, spacecraft and other high-performance aerospace vehicles.
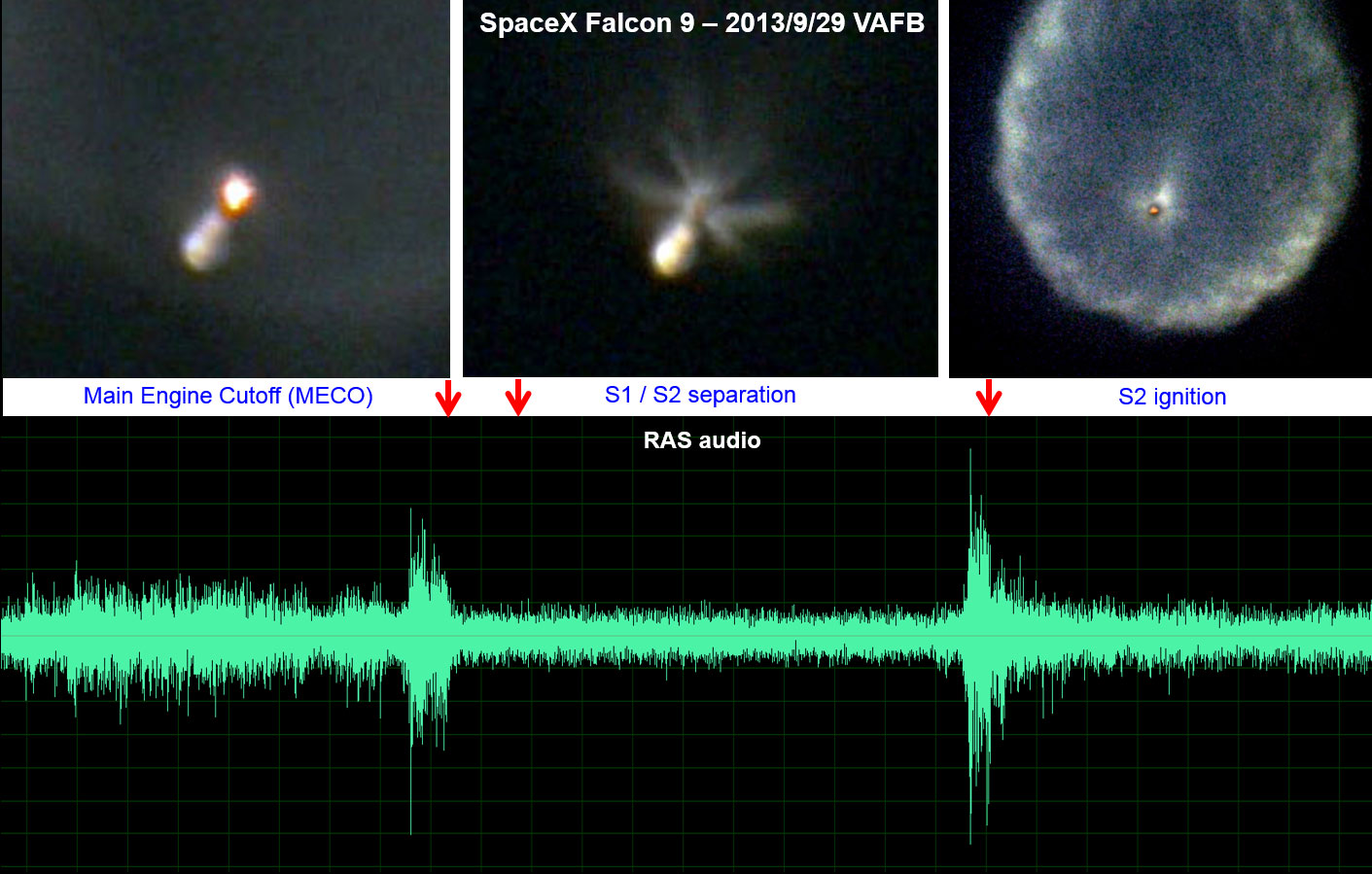
A ground based long range Remote Acoustic Sensor (RAS) telescope provided visual and aural views of the September 29, 2013 launch of a SpaceX Falcon 9 rocket. This example shows main engine cutoff, stage separation and second stage engine start high above the Earth.
Credit: Dan Slater
Yet another idea is a miniaturized version of the device that could find its way onto the surface of Mars or upon the frozen ice fields of Jupiter’s Europa – to eavesdrop for signs of life.
For details on this technology, go to my new Space.com story at:
Listening for Alien Life: Could New Tech Detect Microbe Movements? by Leonard David, Space.com’s Space Insider Columnist October 01, 2015 07:09am ET
http://www.space.com/30709-space-noise-sensor-alien-life.html

Color-coded topographic map of Occator crater on Ceres produced from Dawn spacecraft imagery.
Blue is the lowest elevation, and brown is the highest. The crater, which is home to the brightest spots on Ceres, is approximately 56 miles (90 kilometers wide).
Credit: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
Data gleaned by NASA’s Dawn spacecraft at Ceres has provided another type of look at the puzzling Occator crater.
NASA has released a color-coded topographic map of the bright spots found within the 56 miles (90 kilometers wide) crater.
The topographic images of Occator (oh-KAH-tor) show the brightest spots and a cone-shaped 6-mile-high (4-kilometer-high) mountain.

This view, made using images taken by NASA’s Dawn spacecraft, features a tall conical mountain on Ceres.
Elevations span a range of about 5 miles (8 kilometers) from the lowest places in this region to the highest terrains. Blue represents the lowest elevation, and brown is the highest. The white streaks seen running down the side of the mountain are especially bright parts of the surface.
Credit: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA/PSI
Scientists are still trying to identify processes that could produce these and other unique “Cerean” phenomena.
Closer looks slated
The Dawn spacecraft is currently orbiting Ceres at an altitude of 915 miles (1,470 kilometers). At that height the spacecraft will image the entire surface of the dwarf planet up to six times in this phase of the mission.
Each imaging cycle takes 11 days.
Starting in October and continuing into December, Dawn will descend to its lowest and final orbit, an altitude of 230 miles (375 kilometers).
The spacecraft will continue imaging Ceres and taking other data at higher resolutions than ever before at this last orbit. It will remain operational at least through mid-2016.
Twofer targeting
Dawn is the first mission to reach a dwarf planet, and the first to orbit two distinct extraterrestrial targets: It arrived at Ceres on March 6, 2015 and carried out observations of Vesta in 2011 and 2012.
Dawn’s mission is managed by the Jet Propulsion Laboratory (JPL) for NASA’s Science Mission Directorate in Washington.
More information about Dawn is available at the following sites:

NASA’s Mars rover Curiosity Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, captured this image on September 26, 2015, Sol 1116.
Credit: NASA/JPL-Caltech/MSSS
Today is Sol 1119 for the Mars Curiosity rover mission.
Over last weekend, a mini-drill has cleared the way for drilling “Big Sky.”
“The hope is that this location will provide a good sample of the ‘typical’ rock in the area to compare with some of the interesting alteration we’ve been seeing,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.

Roughly an hour later, this image was taken by Mars rover Curiosity’s Mars Hand Lens Imager (MAHLI).
Credit: NASA/JPL-Caltech/MSSS
Along with the drilling, there will be a number of Mars Hand Lens Imager (MAHLI) documentation images taken of the hole from varying distances and angles.
Anderson reports that on sol 1120, the rover’s Chemistry & Camera (ChemCam) will target the drill tailings, along with the targets “Devil’s Basin,” “Livingston,” and “Deadwood.”
Curiosity’s Mastcam is slated to document the drill hole and all of the ChemCam targets. Then, later in the day on sol 1120, Navcam and Mastcam both have some atmospheric observations.
The robot’s Dynamic Albedo of Neutrons (DAN), the Radiation Assessment Detector (RAD), and the Rover Environmental Monitoring Station (REMS) are scheduled to perform routine monitoring, Anderson adds.
Actual dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

