Archive for the ‘Space News’ Category
Credit:
Bob Sauls/XP4D
M. Wade Holler
Director, Digital Content and Media Strategy
Explore Mars, Inc.
Used with permission.
Explore Mars, Inc. has produced the first annual Humans to Mars Report (H2MR).
This report provides updates on challenges, plus progress in areas such as mission architecture design and development, scientific discoveries, policy, public perception, international cooperation and competition, and new private capabilities.
Analytical tool
As noted in the report’s introduction, authored by Chris Carberry, Chief Executive Officer of the group, and its President, Artemis Westenberg:
“We can expect new players to emerge and political, economic, and international variables to impact the trajectory of the pathway to Mars; still, it will be far easier to chart our path to Mars if there is an independent annual analysis of progress, challenges, and developments. The Humans to Mars Report will serve as this analytical tool.”
Mars myth

Phobos with the red planet Mars in the background.
Credit: M. Wade Holler
Director, Digital Content and Media Strategy
Explore Mars, Inc.
Used with permission
Among the report’s many recommendations:
— Dispel the $1 trillion myth: Human missions to Mars should only cost a fraction of this amount.
— Better story telling: NASA and the space community need to better explain a clear path to Mars and how current programs will advance that path.
This well written and useful report is enriched by a look forward over the next five years, as well as a detailed look at key elements to humans on Mars architecture. Lastly, a section examines public perception of Mars exploration and what factors influence that perception.

Credit: M. Wade Holler
Director, Digital Content and Media Strategy
Explore Mars, Inc.
Used with permission
Resources
To access this informative report, go to:
http://www.exploremars.org/wp-content/uploads/2015/06/HumansToMarsReport_i.pdf
While there, take a look at other items offered at:

Artwork: David Egge
Going up? Attention space elevator button pushers!
A feature-length documentary called Sky Line is being released this month, an impressive view that follows a group of scientists and entrepreneurs as egos collide in an attempt to reach for the stars.
The film, which centers on the real-life building of the once fantastical space elevator concept, will debut at DOC NYC 2015 – America’s largest documentary festival — and will be released on all major On Demand platforms on November 20th, 2015.
Historical note
In his 22nd century-set 1979 novel, The Fountains of Paradise, science fact/fiction writer, Arthur C. Clarke imagined an elevator connecting Earth with an orbiting satellite, eliminating the need for costly and environmentally destructive rockets. While scientists have considered such a project, they have been hampered by the lack of sufficiently advanced technology… until now.

Courtesy: Sky Line
“At its heart, Sky Line is a movie about chasing your dreams, and this was one of ours,” says director Miguel Drake-McLaughlin. “What drives a person to devote his life to pursuits that may take generations to achieve? We set out to answer that question when we first went to Seattle to begin filming the folks involved in the Space Elevator Conference. We didn’t have much of a plan, but we knew everyone had a story – and we found the people that became the backbone of this film.”
For several years, Drake-McLaughlin adds, the documentarians would revisit these eccentric and brilliant characters, resulting in Sky Line.
On demand platforms
With a running time of 74 minutes, Sky Line will be available on all major On Demand platforms, including Amazon Instant Video, Google Play, iTunes, Vudu, and Xbox, beginning on November 20th, 2015.
Sky Line is co-directed by Miguel Drake-Mclaughlin and Jonny Leahan, and executive produced by Robert Wood. The distribution deal was negotiated by Sam Scupp of FilmBuff – an award-winning full-service distribution company, with a focus on delivering high quality, compelling film and video to targeted audiences.
For a Sky Line trailer, go to:
For detailed information on the documentary, go to:

International Space Station.
Credit: NASA
In outer space everyone should hear you wash your hands!
It turns out that the International Space Station (ISS) is a factory for churning out microbes that make for an unhealthy work place.
The results of a new study provide “strong evidence” that specific human skin-associated microorganisms make a substantial contribution to the ISS microbiome – which is not the case in Earth-based cleanrooms.

NASA astronaut Scott Kelly, a flight engineer for Expedition 43 and a member of the one-year crew, is seen here inside the ISS Unity module.
Credit: NASA
Furthermore, the data gathered demonstrate the value of measuring viable cell diversity and population size at any sampling site. This research can be utilized to spot sites on the ISS that can be targeted for more stringent cleaning. Lastly, the new results permit comparisons with other built sites and facilitate future improvements on the ISS that will ensure astronaut health.
Filter and cleaner bag debris
The particulate samples analyzed during this study were gleaned from an ISS HEPA filter, as well as vacuum cleaner bag debris.
The ISS environmental control system includes a distributed ventilation system that contains HEPA filter elements to remove suspended particulate matter from the cabin atmosphere and protect humidity control and air purification equipment from debris accumulation and biofouling.

Flying on a vacuum cleaner. Every Saturday, ISS astronauts vacuum the filters and clean all surfaces.
Credit: ESA/NASA
The new assessment — Microbiomes of the dust particles collected from the International Space Station and Spacecraft Assembly Facilities — explores the environmental microbiome of the ISS as a closed environment.
The work has been published in the scientific journal, Microbiome, led by Aleksandra Checinska of the Jet Propulsion Laboratory’s Biotechnology and Planetary Protection Group in Pasadena, California.
Microbial ecology
Key highlights of the research:
— As long-duration human missions are planned in the future, detection of human pathogens and possible mitigation practices must be developed. In addition, understanding of the ISS microbiome could facilitate the necessary maintenance of this closed habitat and thereby assist in preventing degradation of its components by some microorganisms.
— This study is the first to analyze samples from the ISS air and surface using traditional and state-of-the-art molecular techniques and assays to measure the abundance of microorganisms (i.e., live and dead cells).
— The microbial diversity of the ISS was compared with samples from JPL spacecraft assembly facility cleanrooms, which also represent closed and environmentally controlled built ecosystems.
— The safety and health of spaceflight crewmembers are of the highest importance for current and future missions. Individuals living and/or working in built environments are often susceptible to health issues associated with microorganisms. Moreover, the microbial ecology of ISS remains largely unknown, as study efforts have been mostly focused on microbiological surveillance using cultivation procedures.
Skin shedding
Credit: Checinska et al. Microbiome 2015 3:50 doi:10.1186/s40168-015-0116-3
As noted in the research, it has previously been observed that a high level of visible dust was found in the ISS Node 3 cabin, to the extent it was sticking to the walls. Flight surgeons indicated that this had been reported not just in Node 3 but also throughout the U.S. on-orbit segment and expressed a concern for crew health. Dust on the ISS is expected, with humans being major contributors (via skin shedding, eating, exercising, etc.). Other sources such as on-orbit maintenance activities can release dust from sources such as payloads and systems, clothing, and visiting vehicles.
Part of the new research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with NASA. This new work is expected to facilitate future studies to determine how stable the ISS environment is over time.
For an Open Access look at this research, wash your hands and then go to:
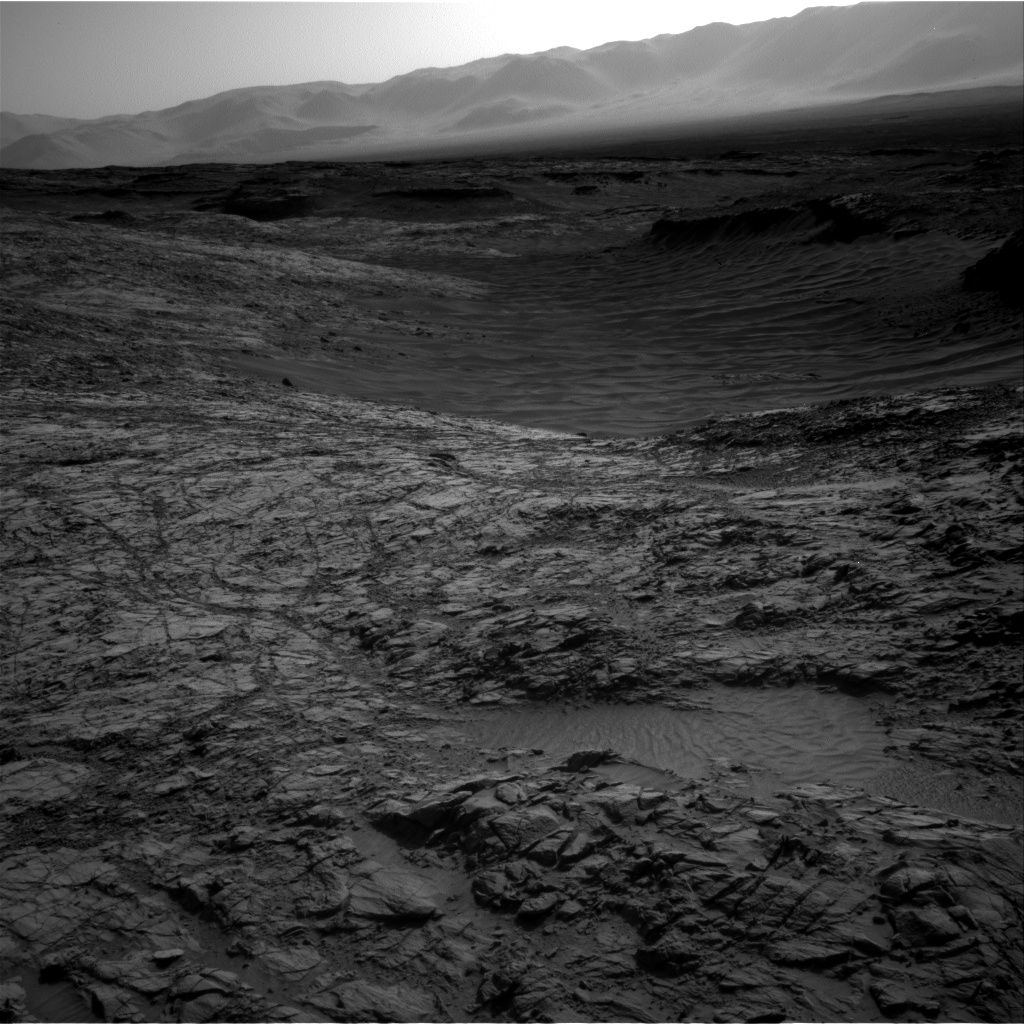
This image was taken by Curiosity’s Right B Navcam on November 3, 2015, Sol 1153.
Credit: NASA/JPL-Caltech
An issue with the Deep Space Network curtailed some Curiosity rover activity. In addition, the intentional “safe mode” status of the Mars Reconnaissance Orbiter (MRO) has meant less exchange between Earth and the Mars robot.
“Still, even with limited data we were able to put together a good plan,” notes Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Recent planning “was a bit challenging,” Anderson reports, “because we only got a few Navcam images down to show us possible science targets, which limited our choices for ChemCam observations.”
Sand dunes ahead
On Sol 1155, the Chemistry & Camera (ChemCam) was to observe the targets “Thermopolis” and “Pinckney” to get measurements of the typical bedrock and typical soil or sand in the area, plus a long-distance image of one of the sand dunes that the rover is approaching, Anderson adds.
Also, on tap, the rover’s Mastcam was set to take documentation images of those two ChemCam targets and the distant sand dune, plus a 13×3 mosaic of a nearby outcrop.
Following those duties, Curiosity was slated to drive and take standard post-drive images.
Looking for clouds
On Sol 1156, Anderson notes, several environmental and atmospheric measurements, including a couple Mastcam observations to measure the amount of dust in the atmosphere were on the books, as was making Dynamic Albedo of Neutrons (DAN) observations, and a Navcam movie to look for clouds.
Lastly, the Mars Descent Imager (MARDI) also has a post-drive image of the ground under the rover.
“The weekend plan,” Anderson concludes, “looks like it will be focused on contact science, but we should be able to fit some ChemCam in there too!”
As always, projected dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Upcoming call for more NASA astronauts.
Credit: NASA
For all you wannabe astronauts, keep an eye out for NASA’s next call for space explorers!
The agency will accept applications from Dec. 14 through mid-February and expects to announce candidates selected in mid-2017. From pilots and engineers, to scientists and medical doctors, NASA selects qualified astronaut candidates from a diverse pool of U.S. citizens with a wide variety of backgrounds.
NASA has noted: “The next class of astronauts may fly on any of four different U.S. vessels during their careers: the International Space Station, two commercial crew spacecraft currently in development by U.S. companies, and NASA’s Orion deep-space exploration vehicle.”
To date, NASA has selected more than 300 astronauts to fly on missions to explore space. Today, there are 47 astronauts in the active astronaut corps, and more will be needed to crew future missions to the space station and destinations in deep space.
For more information about a career as a NASA astronaut, and application requirements, visit:
http://www.nasa.gov/astronauts
Applications for consideration as a NASA Astronaut will be accepted at:
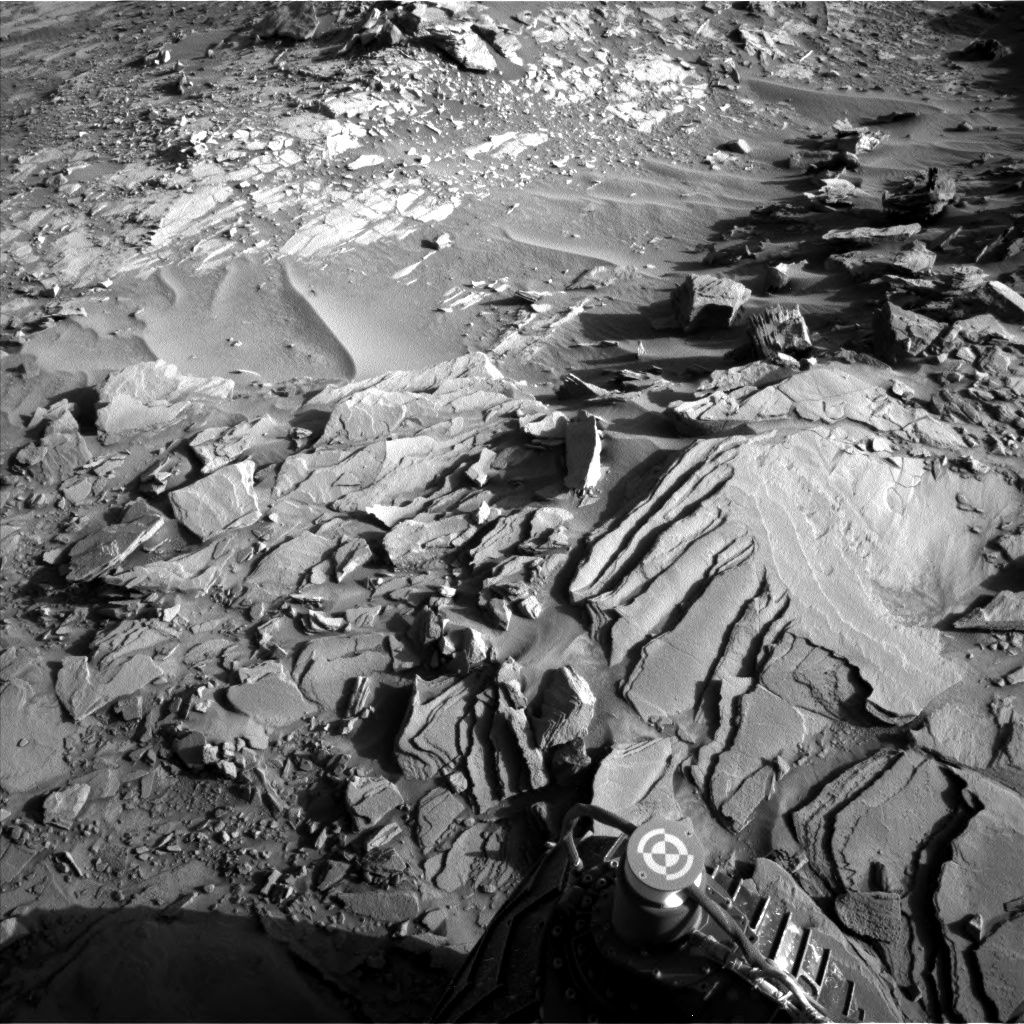
This image was taken by Navcam: Left B onboard NASA’s Mars rover Curiosity on Sol 1151, November 1, 2015
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now in Sol 1152 with the robot focused on analyzing its new surroundings after a drive of some 105 feet (32 meters).
That drive on Sol 1148 last week put the rover “in range of some interesting rocks,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Anderson is a member of the ChemCam team on the Mars Science Laboratory (MSL).
The recent plan for Sol 1150 called for use of Curiosity’s Mastcam to take an 8×4 mosaic of some interesting layered rocks, Anderson explains. That was to be followed by ChemCam and Mastcam observations of the targets “Dunkirk” and “Duperow”.
After the remote sensing is done, Anderson adds, on tap are three Alpha Particle X-Ray Spectrometer (APXS) measurements to be made, checking the abundance of chemical elements in rocks and soils of targets “Exshaw”, “Ellis Canyon”, and “Ennis”.

This map shows the route driven by NASA’s Mars rover Curiosity through the 1151 Martian day, or sol, of the rover’s mission on Mars (November, 02, 2015).
Numbering of the dots along the line indicate the sol number of each drive. North is up. From Sol 1148 to Sol 1151, Curiosity had driven a straight line distance of about 25.74 feet (7.85 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
On Sol 1151, the rover’s Mastcam is slated to take an 18×2 mosaic of the “Carlile” area and a 9×2 mosaic of the “East Glacier” target.
This is to be followed by ChemCam observations of Ennis and Exshaw and the accompanying Mastcam documentation images. ChemCam fires a laser and analyze the elemental composition of vaporized materials from Martian rocks and soils.
In the afternoon on Sol 1151, the plan called for a short drive to the southeast which should provide data to allow a longer drive in the next plan.
Finally, on Sol 1152, the plan is to do Navcam, Mastcam, and ChemCam atmospheric observations, plus some ChemCam focus tests, Anderson notes.
Planned Curiosity activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Newly released documents reveal a wide variety of duties for the classified Air Force project, the Manned Orbiting Laboratory (MOL).
Credit: NRO
A treasure-trove of historical data – pictures, film and numerous documents – has been released by the National Reconnaissance Office (NRO) regarding the secretive Cold War U.S. Air Force project known as the Manned Orbiting Laboratory (MOL).

The first of three MOL astronaut groups.
Credit: U.S. Air Force
The NRO release of MOL information was timed for an event held on October 22 at the National Museum of the U.S. Air Force located at Wright-Patterson Air Force Base near Dayton, Ohio.
Former MOL crew members took part in the event under the title: “The Dorian Files Revealed: The Manned Orbiting Laboratory Crew Members’ Secret Mission in Space.”

Credit: NRO
The audio from the museum’s October 22 event has been posted at:
http://www.nationalmuseum.af.mil/Portals/7/av/mol_panel.mp3?ver=2015-10-28-121530-427
Note: Special thanks to Rob Bardua in the public affairs division at the National Museum of the U.S. Air Force for providing the link.
The MOL program ran from December 1963 until its cancellation in June 1969. According to the National Reconnaissance Office, the MOL program spent $1.56 billion during the program’s life.
As reported earlier, you can dig into thousands of pages of declassified documents on MOL, along with pictures and other resources, by going to:
http://www.nro.gov/foia/declass/MOL.html

New Horizons en route to Pluto and beyond!
Credit: Johns Hopkins University Applied Physics Laboratory/Southwest Research Institute
After a voyage that lasted more than nine years, NASA’s New Horizons probe and its flight through the Pluto system last July conjures up feelings of the little spacecraft that could.
Launched back in 2006, New Horizons has “staying power.” The piano-sized probe weighed at liftoff a modest 1,054 pounds (478 kilograms), energized by a single radioisotope thermoelectric generator.

New Horizons Principal Investigator Alan Stern of Southwest Research Institute (SwRI), Boulder, CO., left, Johns Hopkins University Applied Physics Laboratory (APL) Director Ralph Semmel, center, and New Horizons Co-Investigator Will Grundy Lowell Observatory hold a print of an U.S. stamp with their suggested update since the New Horizons spacecraft has explored Pluto, Tuesday, July 14, 2015 at the Johns Hopkins University Applied Physics Laboratory (APL) in Laurel, Maryland. Photo Credit: (NASA/Bill Ingalls)
New Horizons is slipping through space in great shape, prepared to chalk up even more history in an extended mission mode. If approved by NASA, the craft could eye a Kuiper Belt Object (KBO) in January 2019. At that moment the spacecraft will be at a distance roughly a billion miles beyond Pluto. KBOs are small icy bodies that reside in the enormous region of space that begins a billion miles beyond Neptune’s orbit.

Pluto…and beyond! NASA Associate Administrator for the Science Mission Directorate John Grunsfeld, left, New Horizons Principal Investigator Alan Stern of Southwest Research Institute (SwRI), Boulder, CO, second from left, New Horizons Mission Operations Manager Alice Bowman of the Johns Hopkins University Applied Physics Laboratory (APL), second from right, and New Horizons Project Manager Glen Fountain of APL.
Credit: NASA/Joel Kowsky
The spacecraft remains healthy and continues to spit out data stored on its digital recorders from its fly of Pluto.
I recently sat down with Alan Stern, New Horizons principal investigator from SwRI in Boulder, Colorado, to discuss the historic mission and what lies ahead.
Go to this new Space.com story at:
On Pluto Time: Q&A with New Horizons Leader Alan Stern
by Leonard David, Space.com’s Space Insider Columnist
Date: 27 October 2015 Time: 08:00 AM ET
http://m.space.com/30934-pluto-new-horizons-alan-stern-interview.html

The New Horizons team spells out a token of their appreciation for Pluto encounter supporters at the Johns Hopkins University Applied Physics Laboratory in Laurel, Maryland.
Credit: APL
Newly released documents reveal a wide variety of duties for the classified Air Force project, the Manned Orbiting Laboratory (MOL).
Credit: NRO
A mother lode of information – documents, pictures and a film – has been released by the National Reconnaissance Office (NRO). The material focuses on the classified Cold War U.S. Air Force project known as the Manned Orbiting Laboratory (MOL).
Among duties of MOL crews included satellite reconnaissance activities called Project Dorian, but other tasks were considered.

Credit: NRO
According to the NRO, MOL was a 1960s Air Force program “with the ostensible mission to place military personnel in orbit to conduct scientific experiments to determine the ‘military usefulness’ of placing man into space and the techniques and procedures for doing so if the need ever arose.”
“The Air Force controlled development of the satellite, which was consistent with MOL’s unclassified mission, while the NRO ran development of the covert reconnaissance mission of the program, including the camera system and other subsystems,” according to the NRO.

Credit: NRO
At the start of the program in December 1963 until its cancellation in June 1969 the MOL program spent $1.56 billion, but never launched a manned vehicle into space.

MOL-assigned duties included underwater trial-runs of astronaut mobility.
Credit: NRO
The NRO release of MOL information was timed for an event held on October 22 at the National Museum of the U.S. Air Force located at Wright-Patterson Air Force Base near Dayton, Ohio.
Former MOL crew members took part in the event under the title: “The Dorian Files Revealed: The Manned Orbiting Laboratory Crew Members’ Secret Mission in Space.”
For an informative account of the Wright-Patterson event, go to:
To begin your digging into 20,681 pages of released documents on MOL, along with pictures and other resources, go to:

Curiosity’s Mastcam Right image from Sol 1141, taken on October 22, 2015.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover is just entering Sol 1143 on Mars.
Recent rover research in the last few days involved both daytime and nighttime activities.
According to Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona, unsieved parts of the recently collected Greenhorn drill sample are being dumped onto nearby ground.
Using the rover’s Mastcam and Mars Hand Lens Imager (MAHLI), pictures of the resulting pile were taken.
Also slated, using the rover’s Mastcam and Chemistry & Camera (ChemCam) to observe the target “Maywood” to better characterize the variations in silica content near the rover.
After dusk, the script had MAHLI using its LEDs to take pictures of the walls and bottom of the drill hole. MAHLI will also take close-up images of the drill tailings, Herkenhoff added.

Curiosity ChemCam Remote Micro-Imager shows laser strikes down the hole on Sol 1141, October 22, 2015.
Credit: NASA/JPL-Caltech/LANL
Laser blasting
Recently, images of the drill hole were used to have Curiosity’s ChemCam fire the instrument’s laser down the hole. Doing so allows scientists to analyze the elemental composition of vaporized materials. The technique should be useful in measuring variations in chemistry among individual sand grains and in detecting thin veins.

The strata in the foreground dip towards the base of Mount Sharp, indicating flow of water toward a basin that existed before the larger bulk of the mountain formed. Note that the colors are adjusted so that rocks look approximately as they would if they were on Earth, to help geologists interpret the rocks. This “white balancing” to adjust for the lighting on Mars overly compensates for the absence of blue on Mars, making the sky appear light blue and sometimes giving dark, black rocks a blue cast.
Credit: NASA/JPL-Caltech
Ancient depression
Curiosity has been busy inspecting the strata at the base of Mount Sharp.
That strata dips towards the base of Mount Sharp, indicating the ancient depression that existed before the larger bulk of the mountain formed, according to a Jet Propulsion Laboratory website dedicated to Curiosity activities.
Back on the road
In a late Friday update, the weekend plan calls for Curiosity to depart the current exploration site.
Lauren Edgar, a research geologist at the USGS Astrogeology Science Center, explains: “After several weeks at ‘Big Sky’ and ‘Greenhorn’, it feels good to be getting back on the road…and by road I mean completely uncharted territory on another planet!”

