Archive for the ‘Space News’ Category

Curiosity’s Multi-Mission Radioisotope Thermoelectric Generator (RTG) is shown in this recent Navcam Left B image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech
A short in Curiosity’s Multi-Mission Radioisotope Thermoelectric Generator (RTG) has curtailed a drive of the Mars rover of roughly 50 feet (15 meters). The problem with the rover’s RTG has happened before on several occasions, reports Lauren Edgar a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
“Because the fault is understood, we were able to proceed with the weekend plan from our current location,” Edgar explains.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Internal short
Back in early 2013, it was reported that Curiosity’s RTG power source experienced an internal short.
“Due to resiliency in design, this short does not affect operation of the power source or the rover. Similar generators on other spacecraft, including NASA’s Cassini at Saturn, have experienced shorts with no loss of capability. Testing of another Multi-Mission Radioisotope Thermoelectric Generator over many years found no loss of capability in the presence of these types of internal shorts,” explained a JPL rover update on January 25, 2013.
The RTG issue was resolved, and Curiosity continued onward.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Local bedrock
The Mars machinery is now in Sol 1287.
The first sol of the weekend plan was set to be devoted to targeted remote sensing.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
“We’ll start with some environmental monitoring observations to assess atmospheric opacity and composition,” Edgar adds. On tap was also acquisition of Chemistry & Camera (ChemCam) and Mastcam observations on the targets “Sesriem Canyon,” “Omaheke,” and “Varianto” to assess variations in composition and sedimentary structures in the local bedrock.
Also slated was taking a large Mastcam mosaic of Mt. Sharp, “to take advantage of the low atmospheric opacity right now…which means that the conditions are great for imaging,” Edgar adds.

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Drive rescheduled
A second weekend sol is focused on contact science. The rover’s Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) are to investigate two selected targets.
“The first target exposes some nice bedding in the Stimson formation, and the second includes some interesting bright material for comparison,” Edgar says. “Then on the third sol, we’ll again try to drive towards the ridge to the northwest and acquire post-drive imaging for targeting.”

Curiosity Mastcam Left image taken on Sol 1285, March 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Curiosity Navcam Right B image taken on Sol 1284, March 17, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is still working its way across the Naukluft Plateau and is now into Sol 1285.
On Sol 1284 Curiosity drove roughly 88 feet (27 meters, which brings the rover’s total traverse distance to roughly 8 miles (12,549 meters) reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
In the morning, Curiosity was slated to use its Mastcam and Chemistry & Camera (ChemCam) on targets named “Mulden” and “Koigab” to characterize the bedrock that the robot has been driving over. A Mastcam mosaic was on the plan to investigate the local stratigraphy.
“Then Curiosity will continue driving towards the northwest, and will take post-drive imaging to prepare for contact science over the weekend,” Edgar adds.

Curiosity Rover’s Location for Sol 1284
This map shows the route driven by NASA’s Mars rover Curiosity through the 1284 Martian day, or sol, of the rover’s mission on Mars (March, 17, 2016).
Numbering of the dots along the line indicate the sol number of each drive. North is up. From Sol 1283 to Sol 1284, Curiosity had driven a straight line distance of about 79.25 feet (24.16 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Early the next morning, Curiosity will take several Navcam, Mastcam, and ChemCam observations to monitor the atmospheric composition and opacity and search for clouds.
![]()
A House Space Subcommittee grilled NASA chief, Charles Bolden regarding NASA’s proposed budget for Fiscal Year 2017.
The hearing held today was titled “An Overview of the Budget Proposal for the National Aeronautics and Space Administration for Fiscal Year 2017.”
![]()
Realistic budget?
In a statement, Space Subcommittee Chairman Brian Babin (R-Texas) noted: “Unfortunately, this administration has once again done a disservice to NASA, its employees, and our nation by providing a budget request that ignores the budget agreement, requesting mandatory funding for NASA. I had hoped that the administration would demonstrate leadership by proposing a realistic budget, but instead we were presented with a list of unfunded priorities.
Grounded astronauts
From Chairman Lamar Smith (R-Texas): “There are some areas of agreement between the Committee and the administration in NASA’s Fiscal Year 2017 budget request. But this proposed budget continues to tie our astronauts’ feet to the ground and makes a Mars mission all but impossible.

Credit: Lockheed Martin
Resources:
1)
The hearing charter, loaded with information on NASA programs, is available at:
2)
NASA’s Charles Bolden’s prepared testimony is available at:
3)
To video view the entire hearing held on Thursday, March 17, 2016 – 10:00am | 2318 Rayburn House Office Building, go to:
https://www.youtube.com/watch?v=ry9BwJRmeYk
4)
The full opening statement from Smith is here:
5)
The Opening statement of Chairman Brian Babin (R-Texas) is here at:

European interest is growing in staging a new campaign of lunar exploration.
Earth’s Moon and cis-lunar space will likely see a “renewed and sustained international effort” in the next decade, a concerted effort to engage in exploration missions beyond low Earth-orbit.
A new brochure now circulating underscores key findings from an international gathering of experts that took part in the International Symposium on Moon 2020 – 2030: a New Era of Human and Robotic Exploration held at the European Space Agency’s ESTEC center in December 2015.
“One driver of this renewed interest in the Moon is to assess the economic feasibility of using lunar resources for sustaining human surface exploration activities,” states the new brochure that details meeting outcomes.
Scientific case
The brochure stresses that there is a strong scientific case for lunar surface exploration.
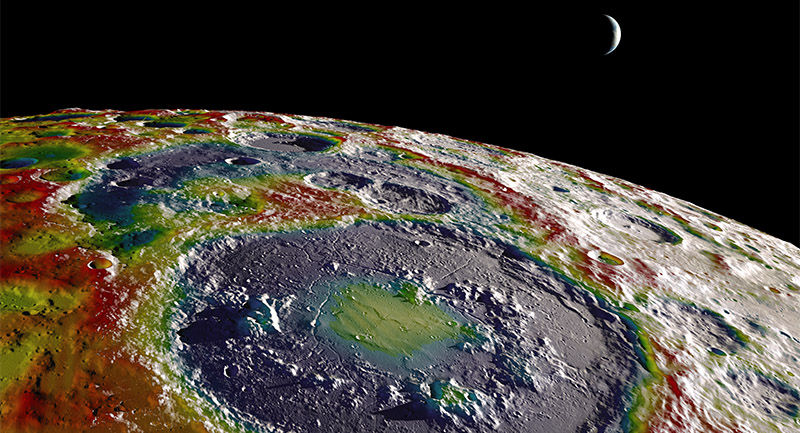
Credit: ESA
“Data from recent orbital missions and new analysis of Apollo samples using modern techniques show that the Moon is the closest place to Earth where we can find clues to the history of the Solar System, including that of the early Earth and of the formation of the Earth-Moon system,” the brochure notes.
Furthermore, “insights into the environment, in which life began on Earth more than three billion years ago could be preserved in previously unexplored areas, such as the poles, the highlands and the far side of the Moon.”
Roadmap towards Mars
Citing that the development and assembly of the International Space Station is complete, slated to operate until at least 2020, “it is time to build on this partnership and open it to new partners to continue the journey beyond low Earth-orbit.”
ESA’s exploration strategy is in line with the Global Exploration Roadmap drawn up by the International Space Exploration Coordination Group. That European strategy considers the Moon as the next destination for humans venturing beyond low Earth-orbit. Doing so is viewed as an integral part of the roadmap towards human missions to Mars.

Credit: Public Domain/Dylan O’Donnell
Lunar orbit infrastructure
Among recommendations stemming from last year’s gathering:
- Make maximum use of lunar orbit infrastructure already planned by agencies to advance lunar exploration goals.
- Some elements of exploration-enabling infrastructure and services may be best delivered by the private sector, allowing agencies to focus on enabling strategic technologies and infrastructure addressing scientific questions. The private sector is ready to invest and requires commitments from governments to ensure that a market exists.
- Robotic missions to the lunar surface should be implemented in the early 2020’s. These surface missions should be coordinated internationally to ensure that a maximum benefit is derived for human missions, for example by returning pristine samples obtained by robotic missions with the crew. Once an infrastructure is in place near the Moon, precursors to human visits to the lunar surface can include teleoperations of assets on the surface.
Technologies
A number of technologies are flagged in the informative brochure, such as:
- Navigation sensors and control for rendezvous and surface operations with an emphasis on lightweight, efficient navigation systems for human and human-robotic integrated systems
- Propulsion systems – in particular, in Europe, the high-thrust chemical propulsion systems, but also other approaches to efficient chemical propulsion.
- Power and thermal systems for cold, dark destinations (e.g. the lunar poles or Mars), such as radio-thermal generators and fission power
- Teleoperations and shared autonomy as an operational concept for exploration.
The participants that took part in Moon meeting, the brochure explains positively received the ESA Director General’s vision of a lunar village.
For more information on the International Symposium on Moon 2020 – 2030: a New Era of Human and Robotic Exploration, go to:
http://spaceflight.esa.int/humanrobotics/
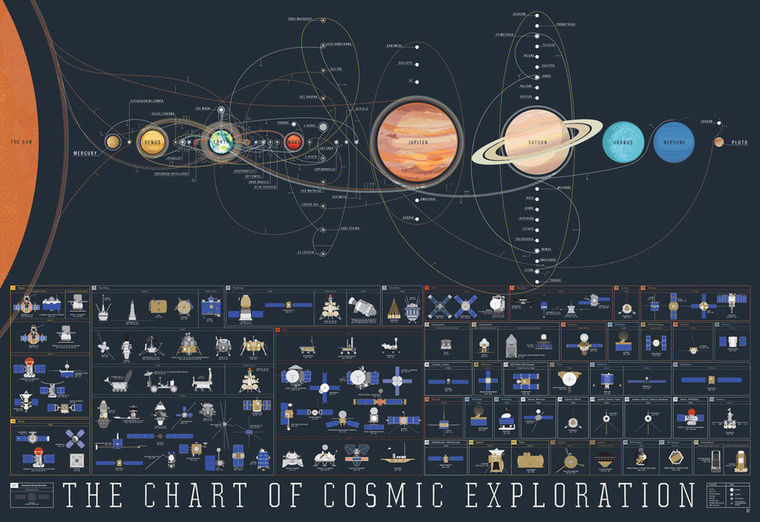
Credit: Pop Chart Lab
A new color-coded chart is available from the Pop Chart Lab that traces the trajectories of every orbiter, lander, rover, flyby, and impactor to ever slip the surly bonds of Earth’s orbit and successfully complete its mission
Probe the solar system from Mercury to Pluto with this stellar schematic of space exploration: From the Luna 2 in 1959 to the NOAA DSCOVR spacecraft in 2015
The chart depicts and array of over 100 exploratory instruments in all. Featuring hand-illustrated renderings of each spacecraft juxtaposed against the giants of our solar system, this 39″ by 27” galactic survey is available for $38.00.
Using 100 lb. archival stock certified by The Forest Stewardship Council, this poster is pressed in Long Island City with vegetable-based inks.
This print is available for preorder. Orders containing it begin shipping Monday, March 28th.
For more information, go to:
https://www.popchartlab.com/products/the-chart-of-cosmic-exploration

Curiosity Mastcam Left image taken on Sol 1282, March 15, 2016.
Credit: NASA/JPL-Caltech/MSSS
Curiosity successfully wheeled itself 85-feet (26-meters) on Sol 1282 “giving the rover nice views of interesting features in the Stimson unit,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
“Some of these features appear to be the result of erosion by windblown sand,” Herkenhoff adds and are the subject of Curiosity’s Right Mastcam mosaic planned for today, on Sol 1283.

Curiosity Navcam Left B image taken on Sol 1283, March 16, 2016
Credit: NASA/JPL-Caltech
The rover’s Chemistry & Camera (ChemCam) is on tap to measure elemental chemistry at the edge of one of the bedrock blocks and Mastcam will acquire another mosaic of a fracture named “Welwitschia Wash” before the rover drives away.
First-rate viewing
The view from the intended location, Herkenhoff reports, is roughly 130 feet (about 40 meters) toward the west and is expected to be excellent “because much of the Gale crater rim and Mt. Sharp will be visible, and the atmosphere is not as dusty as usual.

Curiosity Mastcam Left image taken on Sol 1281, March 14, 2016.
Credit: NASA/JPL-Caltech/MSSS
Other rover post-drive observations include ChemCam remote micro-imager (RMI) and Right Mastcam mosaics of features on Mt. Sharp that are so far away that they can be targeted accurately using available image data.
Also, the Left Navcam will be used to search for clouds and dust devils, Herkenhoff notes.
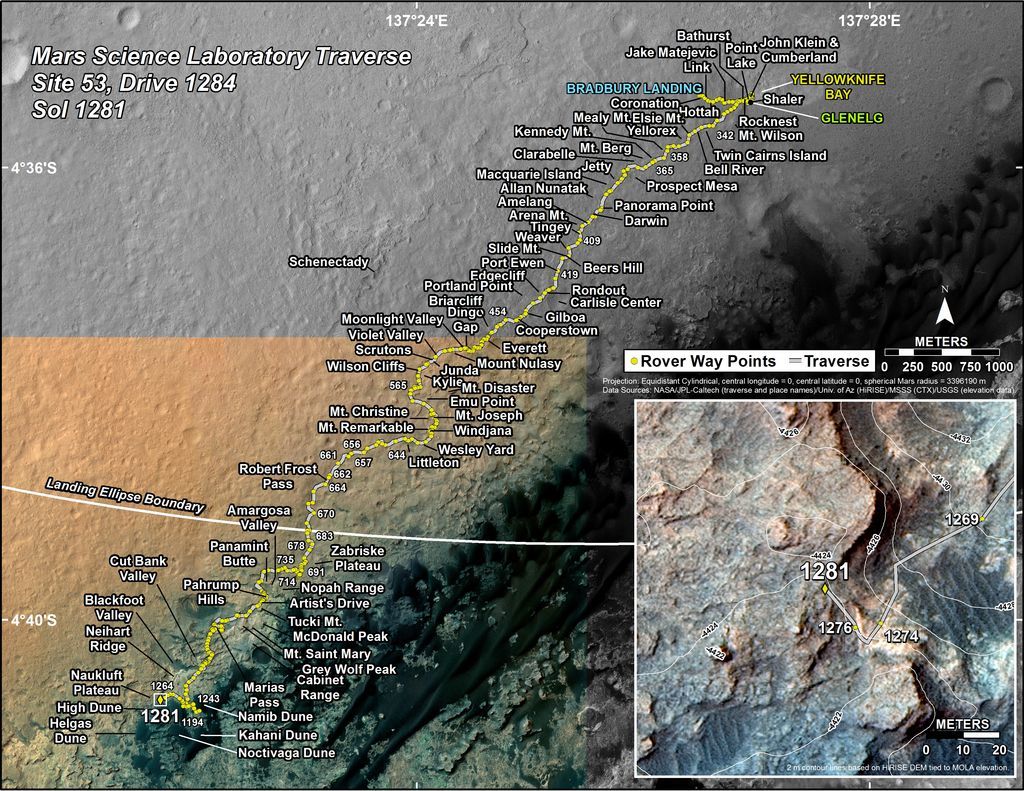
This map shows the route driven by NASA’s Mars rover Curiosity through the 1281 Martian day, or sol, of the rover’s mission on Mars (March, 14, 2016).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile). From Sol 1276 to Sol 1281, Curiosity had driven a straight line distance of about 43.73 feet (13.33 meters).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
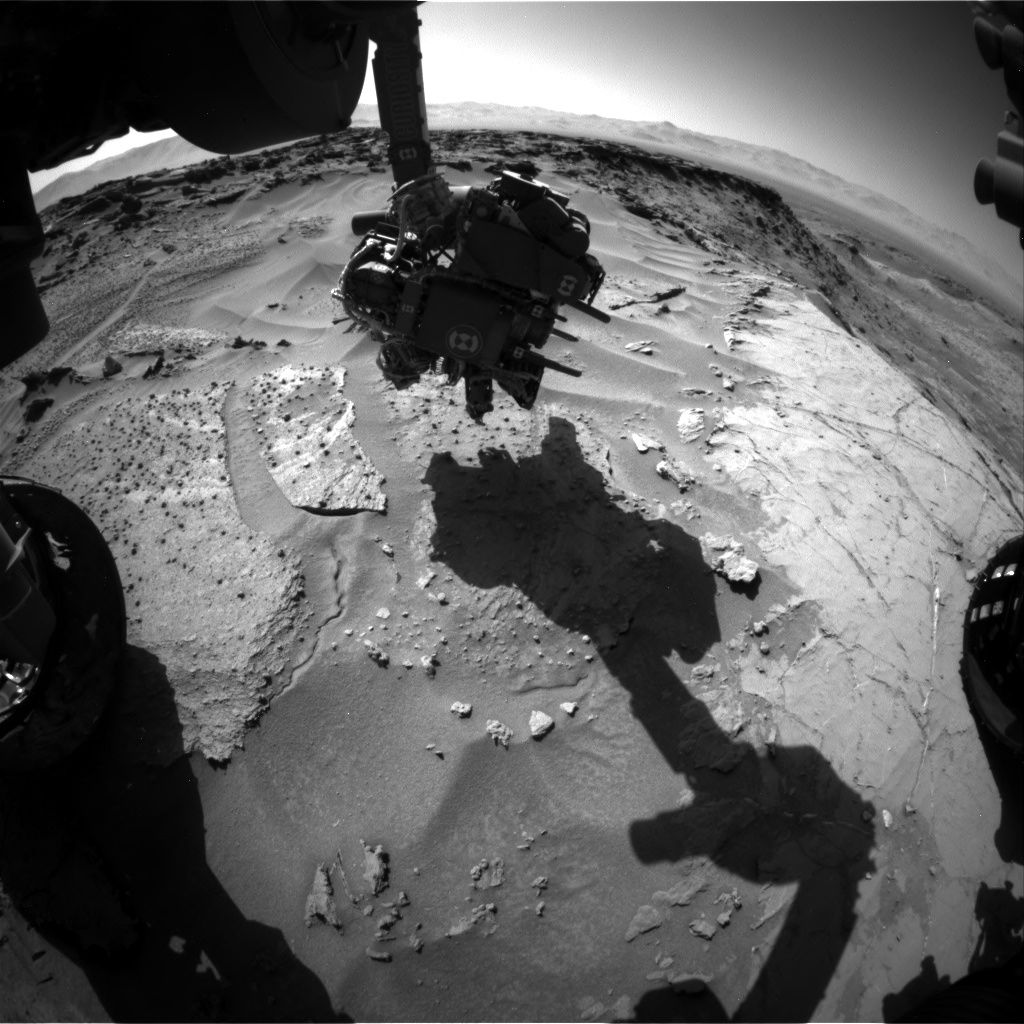
Curiosity Front Hazcam Left B image taken on Sol 1279, March 12, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover is a few hours from entering Sol 1280.
Reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona: “It’s time to wrap up our investigation of the interesting nodules at the contact between the Murray and Stimson formations and resume driving!”

Knobbly textured sandstone on Mount Sharp. Patches of Martian sandstone visible in the lower-left and upper portions of this view from the Mast Camera (Mastcam) of NASA’s Curiosity Mars rover have a knobbly texture due to nodules apparently more resistant to erosion than the host rock in which some are still embedded.
Credit: NASA/JPL-Caltech/MSSS
The weekend starts off focused mostly on contact science.
Nodule looks
On Sol 1279, the Alpha Particle X-Ray Spectrometer (APXS) instrument was slated to analyze two neighboring locations on a group of nodules collectively called “Khomas”, and then on Sol 1280 APXS will analyze a third location on Khomas.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm. Image taken on March 11, 2016, Sol 1278.
Imagery of this nodule shows individual grains of sand and laminations from the sandstone deposit in which the nodule formed. This nodule is about one inch (two centimeters) across.
Credit: NASA/JPL-Caltech/MSSS
The plan also tags Curiosity’s Mars Hand Lens Imager (MAHLI) to collect supporting images, taking pictures of the targets “Etendeka” and “Maieberg”.
In the morning on Sol 1280, the rover is scheduled to make some atmospheric measurements using Navcam, Mastcam, and the Chemistry & Camera (ChemCam), followed by a 20-spot ChemCam analysis of the target “Marienfluss”, right across the Murray-Stimson contact.
Mastcam is set to take a support image of Marienfluss, plus a small mosaic of a target called “Kerpfenkliff”.
Driving onto Naukluft plateau
“Then on Sol 1281, we will get moving again with a roughly 70 meter drive that should take us up onto the Naukluft plateau,” Anderson explains. During that drive of 230 feet, the rover’s Mars Descent Imager (MARDI) is scheduled to collect images of the terrain underneath the rover.
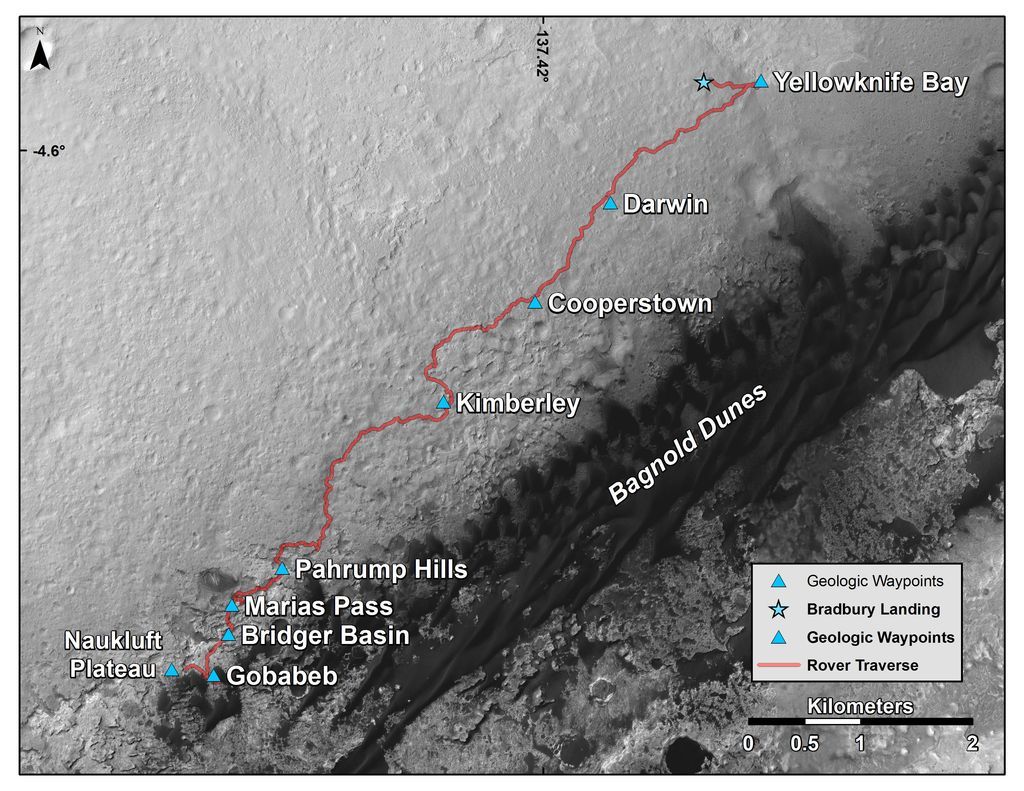
This map shows the route driven by NASA’s Curiosity Mars rover from where it landed in 2012 to its location in early March 2016, approaching “Naukluft Plateau.” As the rover continues up Mount SharpThe scale bar at lower right represents two kilometers (1.2 miles).The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter. North is up. Bagnold Dunes form a band of dark, wind-blown material at the foot of Mount Sharp.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Anderson notes that after the drive, the plan is to take post-drive imaging using Navcam to snag photos of Mt. Sharp. Doing so will help target potential long distance ChemCam remote micro-imager (RMI) images next week.
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Roll out completed, launcher in vertical position on the pad: Proton-M launcher from Baikonur, Kazakhstan.
Credit: ESA – B. Bethge
The European Space Agency’s ExoMars 2016 spacecraft is primed and ready to go – slated for liftoff on March 14 atop a Russian Proton-M launcher from Baikonur, Kazakhstan.
This first mission of ESA’s ExoMars program consists of a Trace Gas Orbiter plus an entry, descent and landing demonstrator module, known as Schiaparelli.
Launch is scheduled for 09:31 GMT (10:31 CET) on March 14 with first acquisition of signal expected at around 21:29 GMT (22:29 CET).
An objective of the mission is to search for evidence of methane and other trace atmospheric gases that could be signatures of active biological or geological processes and to test key technologies in preparation for ESA’s contribution to subsequent missions to Mars.
For a video view of the rollout, go to:
http://www.esa.int/spaceinvideos/Videos/2016/03/ExoMars_2016_rollout
NOTE: Livestreaming of the launch will begin on March 14 at 08:30 UTC (09:30 CET) available at:
http://www.esa.int/Our_Activities/Space_Science/ExoMars/Watch_ExoMars_launch

ExoMars 2016 is encapsulated into the payload fairing. Credit: ESA-B. Bethge

Artist’s impression of the ExoMars 2016 Trace Gas Orbiter (TGO) and Schiaparelli – the entry, descent and landing demonstrator module.
Credit: ESA/ATG medialab

Credit: NASA
There is now a 360 degrees view that allows you to explore the International Space Station’s first module, Zarya.
Launched on November 20, 1998, the Zarya module was joined three weeks later by the U.S. Unity module.
Zarya is also known as the Functional Cargo Block, the module is now mainly used for storage.
Explore this module in Flickr, Facebook or Youtube format with your mobile phone and virtual-reality headset or take the full tour including all Space Station modules with videos and extra information included.
The European Space Agency (ESA) is releasing a new Space Station module view in 360° every week on Thursday.
For this eye-catching new perspective, go to:

Curiosity Mastcam Left image taken on Sol 1276, March 9, 2016.
Credit: NASA/JPL-Caltech/MSSS
In a few hours NASA’s Curiosity Mars rover will enter Sol 1278.
Recent images from the robot show it busily working in a new location, inspecting veins and textures in nearby rocks.

Curiosity Front Hazcam Left B image taken on Sol 1276, March 9, 2016.
Credit: NASA/JPL-Caltech

Curiosity Navcam Left B image taken on Sol 1276, March 9, 2016.
Credit: NASA/JPL-Caltech

Curiosity Navcam Right B image taken on Sol 1276, March 9, 2016.
Credit: NASA/JPL-Caltech

