Archive for the ‘Space News’ Category

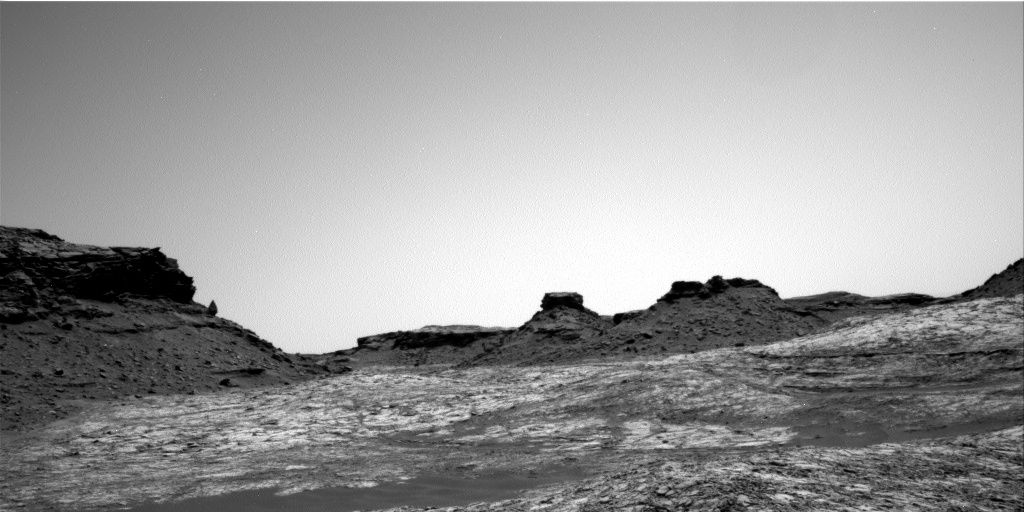
Curiosity Mastcam Left image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
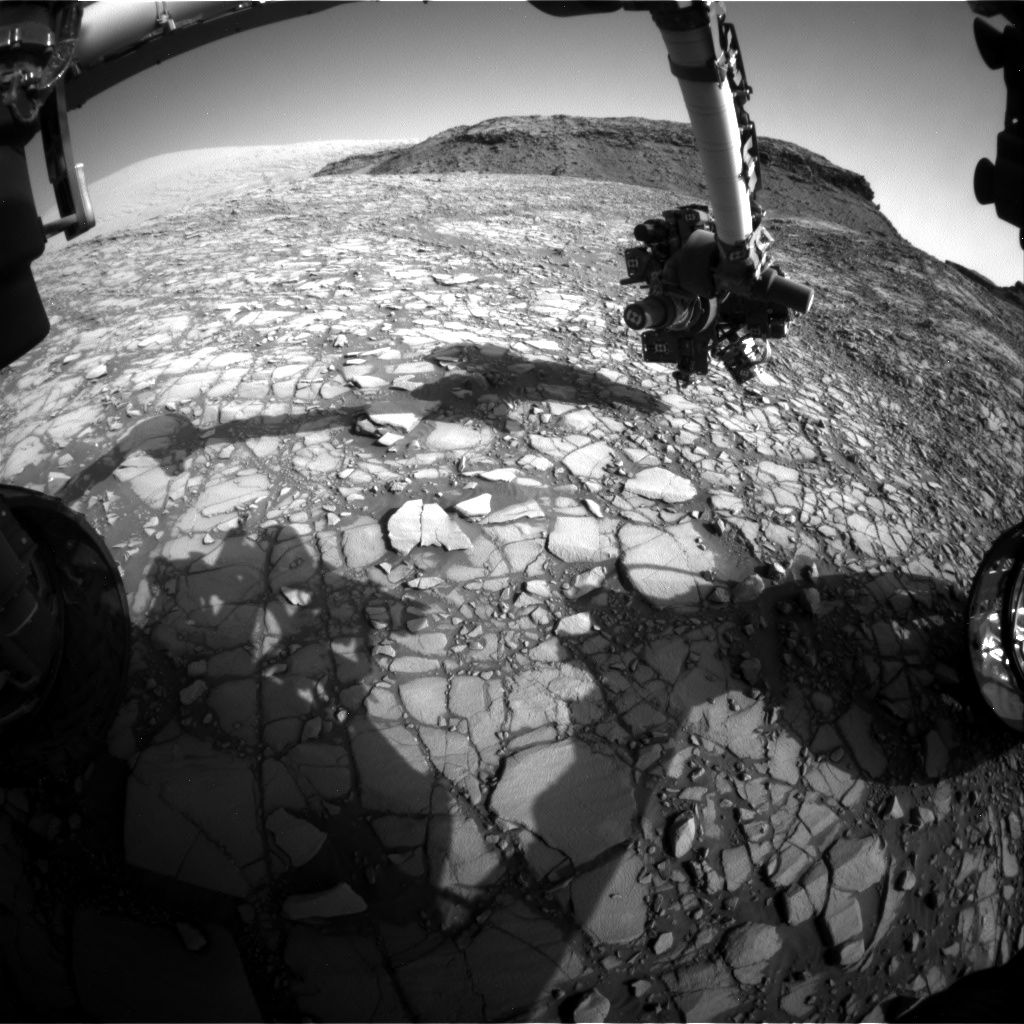
NASA’s Curiosity rover on Mars is wrapping up duties and soon departing Sol 1421 work on the Red Planet.
Ken Herkenhoff from the USGS Astrogeology Science Center in Flagstaff, Arizona reports that Sol 1419 activities were completed successfully, including cleaning the remaining Oudam sample out of Curiosity’s Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA) device.
The focus of Sol 1420 plans was the drilling into the Marimba bedrock target.

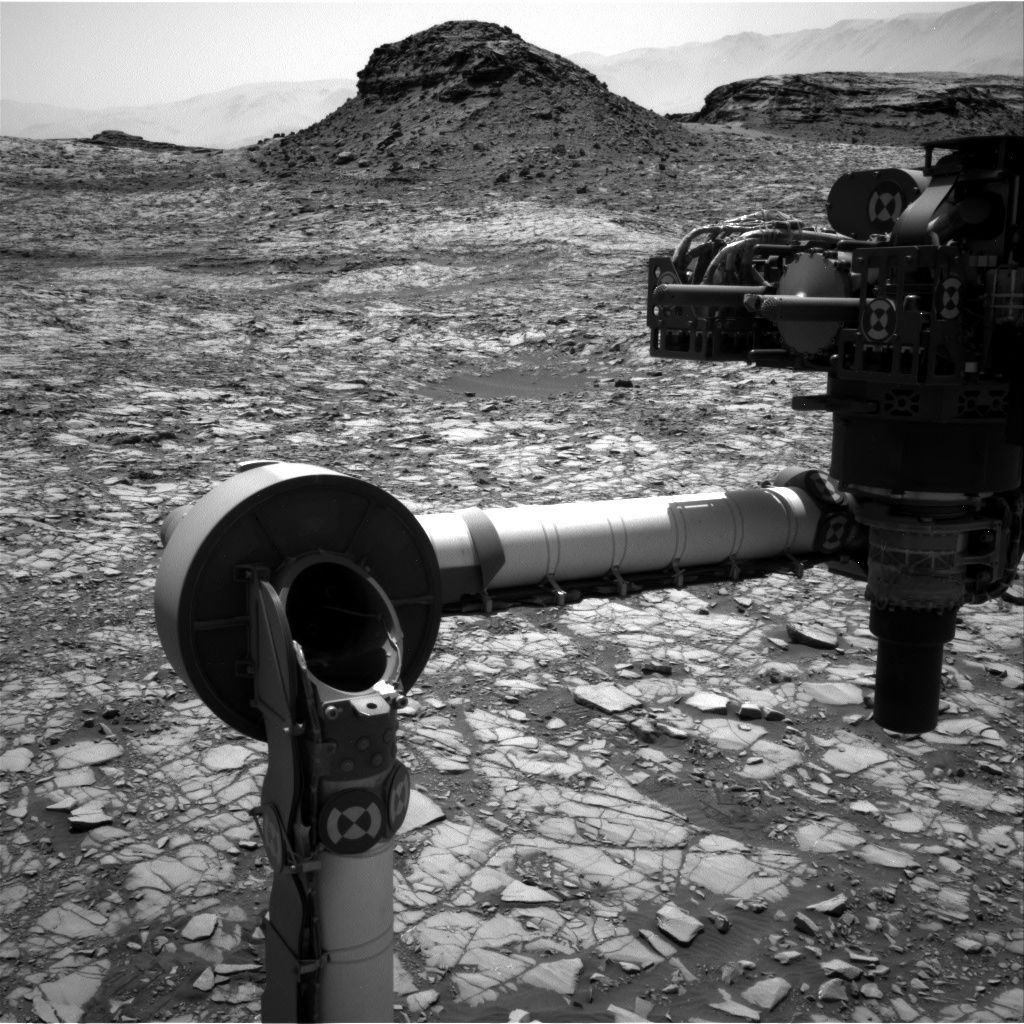
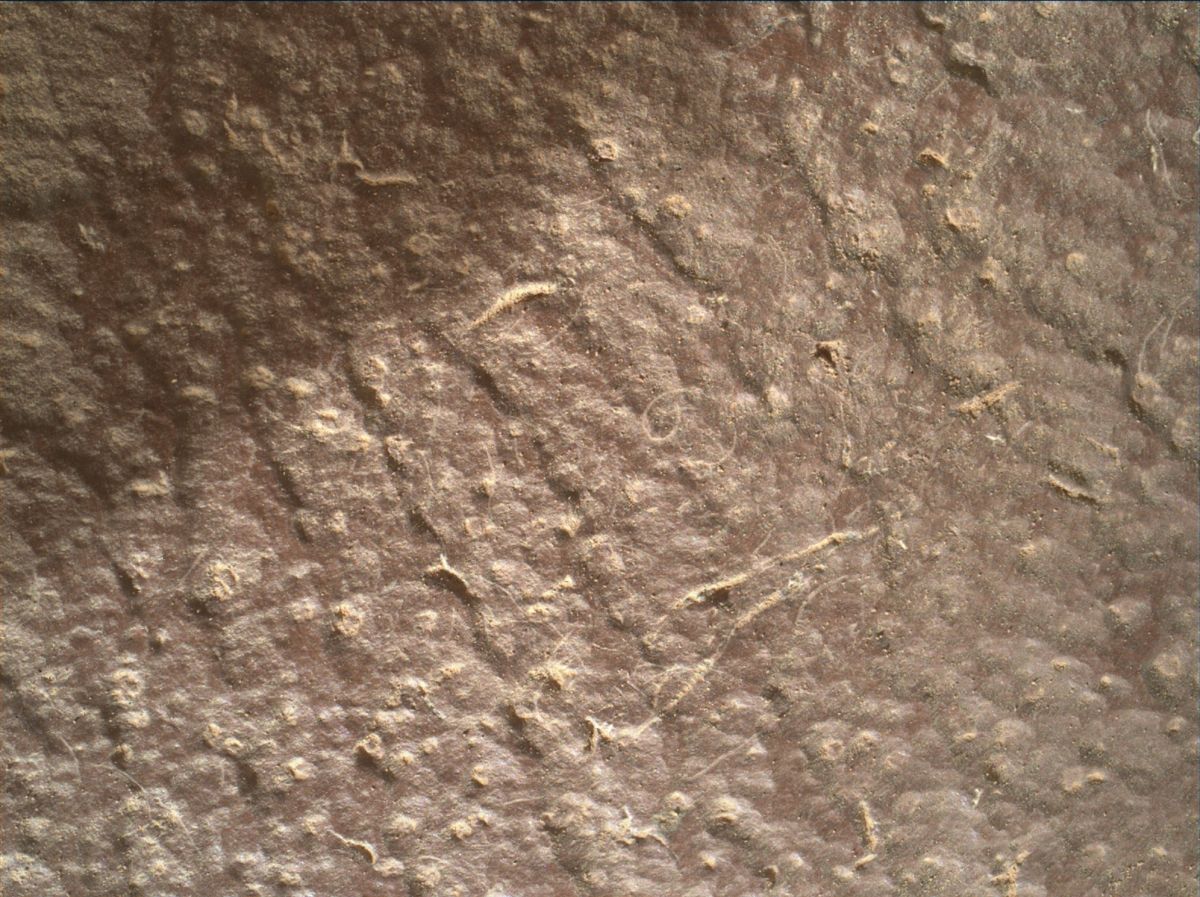
NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager, located on the turret at the end of the rover’s robotic arm, on August 4, 2016, Sol 1420.
Credit: NASA/JPL-Caltech/MSSS
Prior to this activity, the plan calls for the Mars Hand Lens Imager (MAHLI) to image the “noseprint” of the Alpha Particle X-Ray Spectrometer (APXS) contact sensor in the Oudam dump pile and the drill target from various distances, Herkenhoff adds.
After the drilling has completed, the drill bit and the new drill hole was imaged by many of the MSL cameras.

Curiosity Mastcam Right image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
Changes in sand deposits
“And once again, we were able to fit some additional Mastcam observations into the plan,” Herkenhoff explains, such as measurements of dust in the atmosphere, a stereo mosaic extending coverage of the arm workspace, images of targets “Cota 1” and “Cota 2” to serve as a baseline for detecting changes in sand deposits this weekend, and two stereo pairs to improve coverage of one of the Murray Buttes.
Curiosity Navcam Left B image taken on Sol 1421 August 5, 2016.
Credit: NASA/JPL-Caltech
As always, dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Curiosity Front Hazcam Left B image taken on Sol 1420, August 4, 2016.
Credit: NASA/JPL-Caltech

Frame grab Image of Tiangong-2 via CCTV/GB Times
China is dispatching two of its Long March II F or CZ-2F carrier rockets to the country’s Jiuquan launch site. They are being readied to support launch of the Tiangong-2 space laboratory and the Shenzhou-11 piloted spacecraft.
According to a report on CCTV-Plus news, this is the first time that two CZ-2F rockets have been transferred to the launch center at the same time.
One of the carrier rockets is set to launch in the third quarter of this year (next month) the Tiangong-2 space laboratory. The other booster is to lift off later with two astronauts to dock with the space laboratory.
Final battle
Tiangong-2 arrived at the Jiuquan launch complex early last month and is going through tests prior to its launch.
The Shenzhou-11 piloted craft will carry out a variety of scientific researches and applications, as well as appraise some key techniques and checking on the possibility of long-term human residence in space.
“Let’s put it this way…it’s the start of the final battle of the mission of Tiangong-2 space laboratory. We are going to complete the en-masse lifting and thorough checking of the rocket, upon its arrival at the launch center,” says Jing Muchun, chief commander of CZ-2F rockets on CCTV-Plus.
“The rockets have to be sent into space without a hitch hidden or otherwise. This is our ultimate goal,” says Jing.
If all goes according to plan, the Tianzhou-1 cargo resupply vessel will be hurled into Earth orbit next year to support Tiangong-2 operations. The supply ship will be sent spaceward atop a Long March 7 rocket from the Wenchang launch center in the first half of 2017.
A short CCTV-Plus video is available here showing launch preparations and graphics depicting the Tiangong-2 mission:
http://pv.news.cctvplus.com/2016/0803/8028732_Preview_1470223827673.mp4
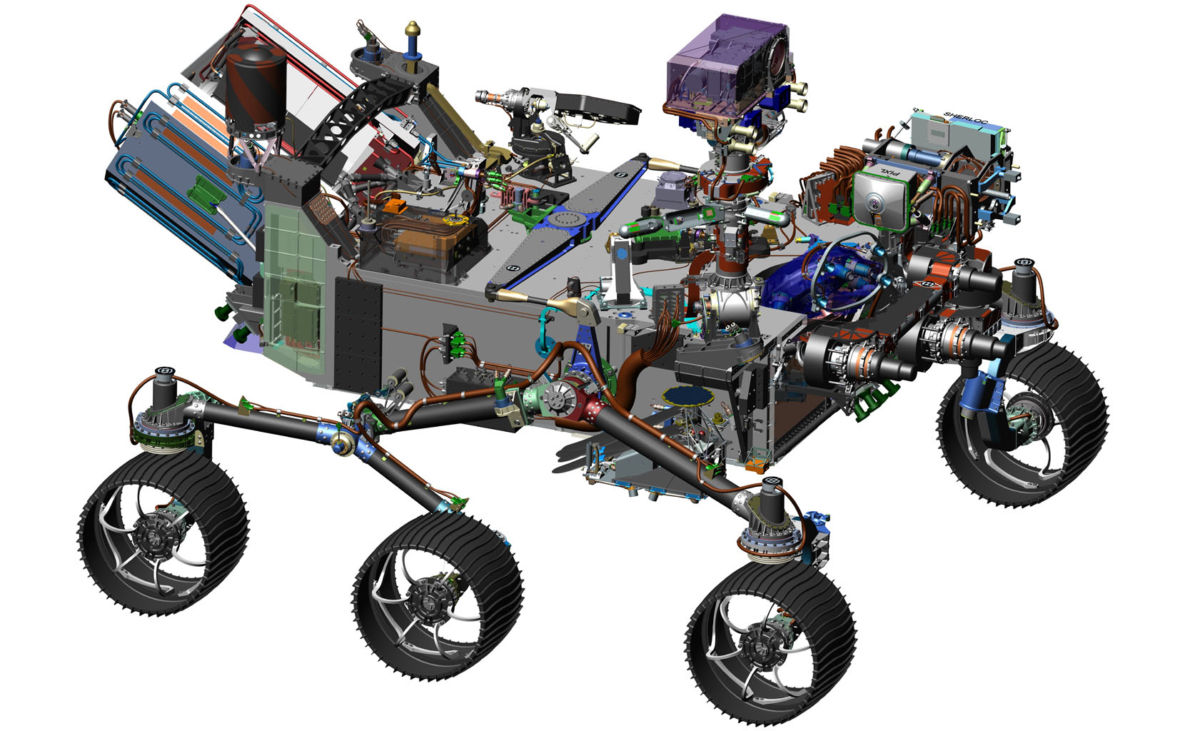
The listening robot. New computer generated image of Mars 2020 rover.
Credit: NASA/JPL/Caltech
NASA’s 2020 Mars rover is to carry special cameras and microphones to capture stunning views and sounds of its barnstorming entry, descent and landing on the Red Planet.
The hardware will not only give the public a unique ringside seat to exploration. Such equipment can also help engineers design future robotic and human landing systems for Mars.
If all goes to plan, the Mars 2020 mission will be the most documented landing in history.

Screaming in! Mars 2020 rover’s entry, descent and landing – microphones and cameras will capture the sounds and sights.
Credit: NASA/JPL-Caltech
For more information on how the Mars robot will be “all ears and eyes,” go to my new Space.com story:
Mic’d Up on Mars! 2020 Rover Will Capture Sounds of Red Planet
By Leonard David, Space.com’s Space Insider Columnist
August 4, 2016 07:00am ET
http://www.space.com/33637-nasa-mars-2020-rover-microphone.html

China is pressing forward on its Tiangong space lab program.
Credit: CAST
China’s Tiangong-2 space lab is being prepared for launch, a true “Space Lab” that will verify key technologies for building China’s space station, explains its chief designer, Zhu Zongpeng.
Zhu explains in a new interview with China Central Television (CCTV) that the Tiangong-2 is being prepared for liftoff in the third quarter of this year.
The piloted Shenzhou-11 spacecraft – with two persons onboard — is also being readied for launch, later to dock with the Tiangong-2.
Three major missions
The space lab will complete three major missions, according to Zhu, who said the Tiangong-2 can be called “China’s first space lab in terms of its function.”
“The Tiangong-2 can be called the first space laboratory of China, and its missions mainly includes mid-term stay,” Zhu adds.
After the docking of the Shenzhou-11 spacecraft with the Tiangong-2, the astronauts will enter the space lab to work and live in the orbiting facility for 30 days.
The second mission, Zhu says, is to dock with a cargo ship next year to implement on-orbit propellant re-supply.
The third mission is to carry out some experiments for China’s future space station, including technical experiments and some relevant experiments involving repair work.

China’s Shenzhou-11 piloted spacecraft in testing.
Credit: CCTV/framegrab via GBTimes.
Key technology
The orbit altitude of the Tiangong-2 will reach 393 kilometers from Earth, the same as that of the future space station.
“The orbit altitude of the Tiangong-2 was designed according to the altitude for operating the space station in the future, and is higher than that of the Tiangong-1, mainly aimed at verifying docking and rendezvous technologies for the space station,” said Zhu.
The on-orbit propellant resupply will also be a key technology for the stable operation of the space station.
“We must collect gas from the fuel tank of the Tiangong-2 into a cylinder, so that a pressure difference will be formed to ensure that the propellant will be supplied from the cargo ship to the space lab,” says Zhu, adding that precise and sealed connection of the re-supply pipelines will also be ensured.

China’s 60-ton medium-size space station is depicted in this artwork.
Credit: CNSA
Pre-launch testing
Compared with the Tiangong-1, the Tiangong-2 has more facilities to ensure a comfortable stay for the astronauts, including equipment for receiving television programs from Earth and sending e-mails, according to Zhu.
At least 14 experiments will be carried out in the Tiangong-2.
The Tiangong-2 is now under pre-launch testing at the Jiuquan Satellite Launch Center.
China’s space officials note they want to put a permanent human-staffed space station into service around 2022. The construction of the country’s first orbiting space station will be completed by around 2020.
For a review of their plans, go to this site (in Chinese) with graphics:
Credit: IHMC
Check out an up-close, podcast interview with Pascal Lee, co-founder and chairman of the Mars Institute, director of the NASA Haughton-Mars Project at NASA Ames Research Center, and senior planetary scientist at the SETI Institute.
This summer marks Lee’s twentieth summer field trip on Devon Island, the largest uninhabited earth with geological evidence similar to what Lee suspects would be found on Mars.
Extending human capabilities
This STEM-Talk discussion is offered by the Institute for Human & Machine Cognition (IHMC), a group that pioneers technologies aimed at leveraging and extending human capabilities.

Phobos encampment.
Credit: NASA/Langley Research Center
Lee talks about preparing for the exploration of Mars and its moons: Phobos & Deimos.
Lee is also noted for his Mars research in the upcoming National Geographic book – Mars: Our Future on the Red Planet — to be released October 25th.
Resources
To listen in on this special STEM-Talk interview with Lee, hosted by Dawn Kernagis (in 2016, Dawn was selected as one of six crew members to join NASA’s 21st undersea mission, NEEMO) and IHMC senior research scientist Tom Jones, a veteran NASA astronaut, go to:
https://www.ihmc.us/stemtalk/episode-17/
For more information on this soon-to-be-released volume, go to:
https://shop.nationalgeographic.com/product/books/books/new-books/mars
Also go to Amazon at:
Curiosity Navcam Right B image taken on Sol 1417, August 1, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover has just entered Sol 1419 of its exploration of Mars.
A scripted plan now being implemented is focused on setting up the robot for its next drill hole.
“Originally there was going to be no science block at all, but we ended up with a little bit more power than expected,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center and a member of the Chemistry & Camera (ChemCam) team on the mission.
Curiosity Navcam Right B image taken on Sol 1417, August 1, 2016.
Credit: NASA/JPL-Caltech
“So we managed to fit in a ChemCam observation of the expected drill target, called ‘Marimba’ along with Mastcam documentation,” Anderson adds.
The brush off
Once that was done, Curiosity dumped its sieved sample from a previous drill at “Oudam” and did some contact science on Marimba.

The dust off! NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI) — located on the turret at the end of the rover’s robotic arm — on August 2, 2016, Sol 1418.
Credit: NASA/JPL-Caltech/MSSS
This included Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) activities of the drill location before and after brushing the dust off, Mastcam inspection of various rover components, and the “pre-load” test where researchers make sure the rock can handle the pressure exerted by the drill.
“If all of that goes well,” Anderson reports, “we should be able to drill later this week!”

VSS Unity begins to stretch its legs with the first tests conducted out of the Air and Space Port hangar in Mojave, California.
Credit: Virgin Galactic
The U.S. Federal Aviation Administration’s Office of Commercial Space Transportation (FAA-AST) has awarded Virgin Galactic an operating license for SpaceShipTwo – a passenger-carrying suborbital space ship.
In an August 1 statement from Virgin Galactic, Virgin Galactic Senior Vice President of Operations Mike Moses reports:
“The granting of our operator license is an important milestone for Virgin Galactic, as is our first taxi test for our new spaceship. While we still have much work ahead to fully test this spaceship in flight, I am confident that our world-class team is up to the challenge,” Moses said.
“August is off to a good start! More on recent progress & ongoing testing coming soon,” says a Virgin Galactic blog today.
New vehicle
In late October of 2014, the SpaceShipTwo program suffered a major catastrophe, killing one pilot and seriously injuring the other.
The license award announced today comes as the new vehicle — VSS Unity — begins to stretch its legs with the first tests conducted out of the Air and Space Port hangar in Mojave, California.

Virgin Galactic’s suborbital vehicle – VSS Unity.
Credit: Virgin Galactic
Unity conducted the first taxi test today to evaluate and calibrate the navigation and communications/telemetry systems, according to Virgin Galactic.
License review process
“The license award, which will ultimately permit commercial operations of the vehicle, was the culmination of several years of in-depth interaction with the FAA,” adds the Virgin Galactic press statement. “The license review process consists of an in-depth review of the vehicle’s system design, safety analysis and flight trajectory analysis, culminating in FAA-AST approval.”
Virgin Galactic was founded by Sir Richard Branson and owned by the Virgin Group and Aabar Investments PJS.

Earlier image of Sir Richard Branson, founder of Virgin Galactic.
Credit: Virgin Galactic
To date, 700 men and women from over 50 countries have reserved places to fly on Virgin Galactic’s reusable space launch system, consisting of carrier aircraft WhiteKnightTwo and spacecraft SpaceShipTwo.
SpaceShipTwo and WhiteKnightTwo are manufactured and tested in Mojave, California by its manufacturing wing, The Spaceship Company. Spaceflight operations will be based at Spaceport America in New Mexico, the world’s first purpose-built commercial spaceport.
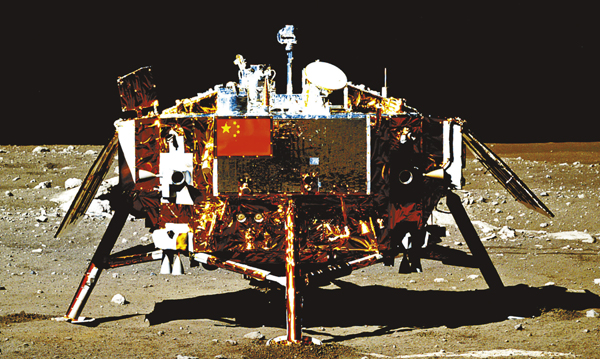
China’s Chang’e 3 Moon lander, imaged by Yutu lunar rover. continues to serve as an astronomical observation outpost.
Credit: NAOC
China’s lunar lander, Chang’e-3, with the country’s first lunar rover aboard, successfully landed on the moon on December 14, 2013. That event marked China’s first successful soft-landing on the surface of an extraterrestrial body.
Chinese space officials noted last week that the lander has entered its 33rd dormancy period, calling it a record for the longest work time by a lunar probe.
The still active lander has collected significant amounts of data and images of the Moon in the past two and half years, “getting three ‘first’ research findings in the human lunar exploration history,” according to the State Administration of Science, Technology and Industry for National Defense.

Image of China’s Chang’e 3 lunar lander taken by Yutu rover. Equipment on the stationary lander continues to operate after landing on the Moon in December of 2013.
Credit: Chinese Academy of Sciences
Lunar penetrating radar
The Chang’e-3 lander is equipped with three categories of scientific devices, including a descent camera, a lunar-based optical telescope, and an extreme ultraviolet imager, exploring the lunar, the universe and the plasmasphere around the Earth.
As reported in a July 29th CCTV-Plus video: Chang’e-3 obtained the world’s first geological section map of the Moon with a lunar penetrating radar, which provided an important scientific basis to know the evolution history of the Moon and explore its resources.
The map showed the features and the evolution history of the geological structure that is 330 meters deep under the lunar surface, and discovered a new rock – the lunar basalt.
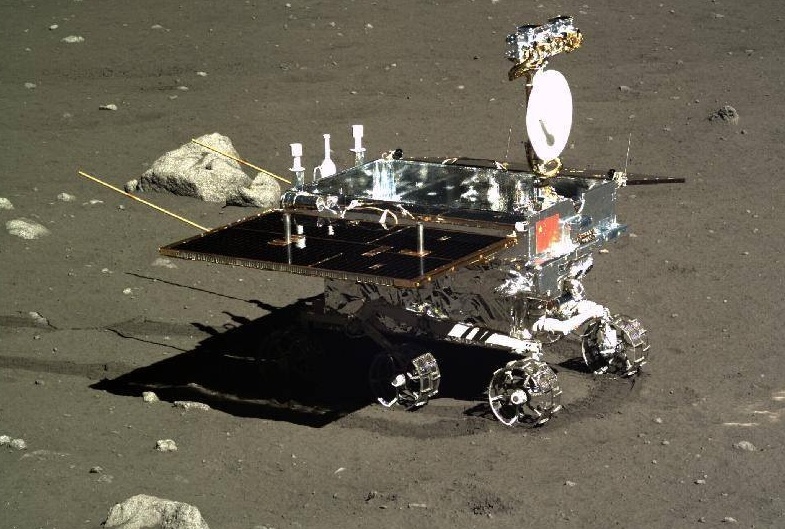
China’s Yutu Moon rover.
Credit: Chinese Academy of Sciences
“The radar detected three layers of basalt under the ground…especially that the top layer was 195 meters deep. This indicates that until the late period, about more than two billion years, there were still huge amounts of magma that were erupting. This shows that the activity of the magma on the Moon lasted longer than expected before,” explains Lin Yangting, a researcher of the Institute of Geology and Geophysics, Chinese Academy of Sciences.
Chang’e-3’s latest data showed that the lunar soil is five meters deep, almost doubling the previous data obtained by other countries.
Water on the moon
According to the CCTV-Plus video, Chang’e-3’s optical telescope working in the ultraviolet band got the latest data about the water content on the lunar surface, “proving for the first time that there is no water on the Moon.”
“We measured the content of water on the lunar surface and above, and got the historically smaller value, which is also in line with the expectations of the experts on the formation of the Moon,” said Wei Jianyan, researcher of National Astronomical Observatory, Chinese Academy of Sciences.
“The smaller the measured value, the smaller possibility of existence of water in figuring out whether there is water on the Moon,” the CCTV-Plus video adds.
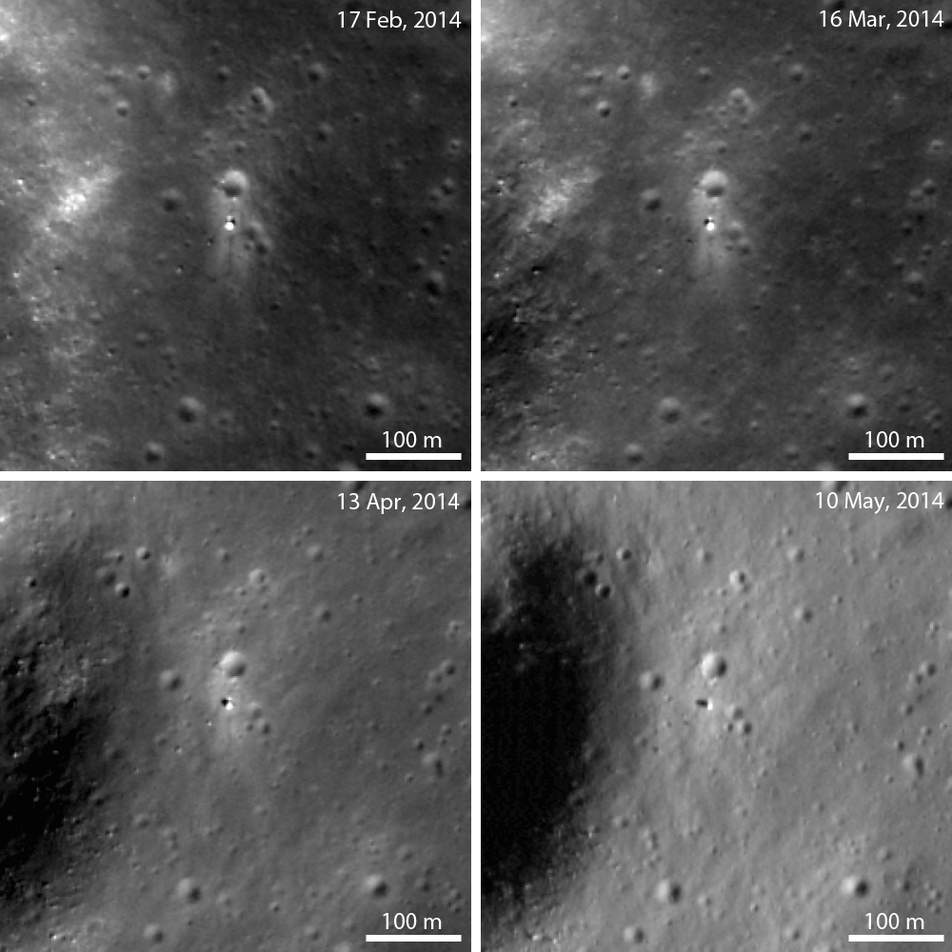
The shadow knows! China’s Chang’e 3 landing site as seen via NASA Lunar Reconnaissance Orbiter.
Credit: NASA/GSFC/Arizona State University

Credit: National Astronomical Observatories of Chinese Academy of Sciences
Earth’s plasmasphere
The world’s first extreme ultraviolet imager installed on the Chang’e-3 lander also obtained a large amount of plasmasphere images of the Earth.
The plasmasphere is the first of the natural screens surrounding the Earth, which can extend to around 40,000 kilometers away from the surface of the Earth. It can prevent the interference of the solar wind, high-energy particles and most of the cosmic rays.
“The Earth’s plasmasphere is in the innermost of the Earth’s magnetosphere. If the magnetosphere is interfered, the shape, position and structure of the plasmasphere will be affected. Therefore by detecting the structure and evolution of the Earth’s plasmasphere, we can monitor the influence of the solar activities to the earth,” says He Han, associate researcher of National Astronomical Observatory, Chinese Academy of Sciences.
1,300 images
The huge impulse of the solar storm will severely destroy the communication functions of the artificial objects that are running along the earth, such as the navigation satellite, the communication satellite and manned spacecrafts.
It is the exclusive ability of Chang’e-3 to observe the change of the plasmasphere as an indicator to monitor the solar storm.
The extreme ultraviolet imager on the Chinese lander has already collected more than 1,300 images of the Earth’s plasmasphere.
Curiosity Front Hazcam Left B image taken on Sol 1416, July 31, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is presently at work on Sol 1417.
Back on Sol 1414, the rover drove nearly 145 feet (44 meters), wheeling into an area with larger blocks of bedrock.
“This looks like a good area to drill into the Murray Formation, so nearby targets were selected and we are planning a short drive to position the vehicle for drilling,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
But first, the robot’s Chemistry & Camera (ChemCam) and Mastcam were slated to observe bedrock targets “Chibia” and “Dondo.”

Curiosity Navcam Left B image taken Sol 1416, July 31, 2016.
Credit: NASA/JPL-Caltech
Brushed spot
Mastcam will also measure the dust in the atmosphere and take an image of the Sol 1414 ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) target.
From there, the arm was to be deployed for lots of contact science and standard images of the wheels, Herkenhoff adds.
Curiosity’s Mars Hand Lens Imager (MAHLI) was on tap to take pictures of Chibia before the robot’s Dust Removal Tool (DRT) was to brush it off, then take lots of stereo images of the brushed spot.

Mars Hand Lens Imager (MAHLI) image taken on Sol 1417, July 31, 2016.
MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Search for clouds, dust devils
MAHLI was also set to acquire a full suite of images of Dondo before the Alpha Particle X-Ray Spectrometer (APXS) was to measure its elemental chemistry.
After sunset, the APXS was to be placed on Chibia for an overnight integration.
Early on Sol 1417, Curiosity’s Navcam is scheduled to search for clouds and dust devils. Mastcam was also to measure atmospheric dust, and ChemCam will measure atmospheric chemistry.
Drill campaign
“The bump to the potential drill targets will be followed by acquisition of imaging and other data needed to plan the drill campaign and other activities next week,” Herkenhoff explains.
Mars Hand Lens Imager (MAHLI) image taken on Sol 1417, July 31, 2016.
MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Finally, the AEGIS is slated to be used for the first time to autonomously select two targets and acquire ChemCam data on both of them.
“This is a very full and complex plan,” Herkenhoff concludes.
From Sol 1410 to Sol 1412, Curiosity had driven a straight line distance of about 147.85 feet (45.06 meters).
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 8.40 miles (13.51 kilometers).
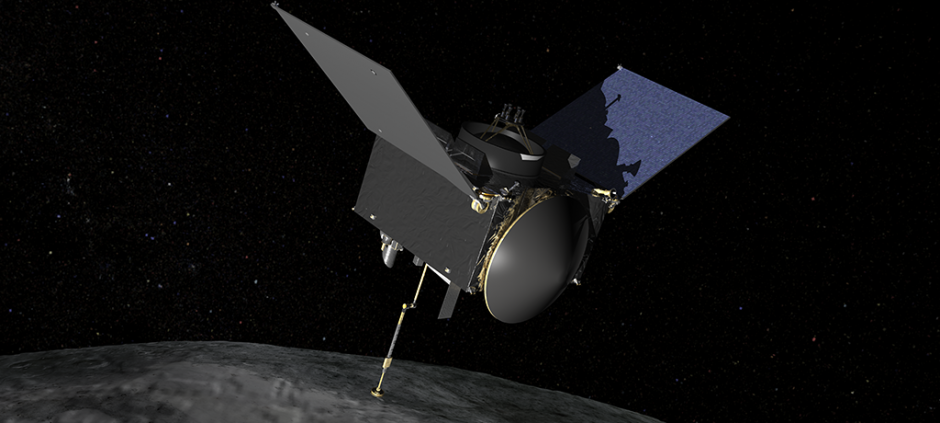
NASA’s Origins, Spectral Interpretation, Resource Identification, Security – Regolith Explorer asteroid sample return mission.
Credit: NASA/Goddard
NASA’s Origins, Spectral Interpretation, Resource Identification, Security – Regolith Explorer asteroid sample return mission is best called — for breathing purposes — as OSIRIS-REx). It is the first U.S. mission to collect a sample of an asteroid and return it to Earth for study.
OSIRIS-REx is scheduled to be launched on September 8, 2016 from Space Launch Complex 41 at Cape Canaveral Air Force Station, Florida.
The launch window opens at 7:05pm EDT and lasts for approximately 120 minutes.

OSIRIS-REx undergoing pre-launch checkout.
Credit: NASA/KSC
The big day
“With only 39 days to go until we launch OSIRIS-REx our schedule is packed with activities,” explains Dante Lauretta, a professor of planetary science in the Lunar and Planetary Laboratory at the University of Arizona. He is the Principal Investigator for the NASA OSIRIS-REx Asteroid Sample Return Mission.
“The big day!” is near at hand. “If the weather is clear and we don’t have any wayward aircraft or boats in restricted areas,” the Atlas V will send OSIRIS-REx on its way to Bennu and back, Lauretta notes via a July 31 blog.
“If launch is delayed – we can try again on September 9. Our last opportunity to launch this year is October 12 so we have plenty of chances to get off the Earth,” Lauretta explains.
Hit list
The OSIRIS-REx spacecraft is traveling to Bennu, a carbonaceous asteroid whose regolith may record the earliest history of our solar system. Bennu may contain the molecular precursors to the origin of life and the Earth’s oceans.
This asteroid is also on the “hit list” – that is it’s one of the most potentially hazardous asteroids, as it has a relatively high probability of impacting the Earth late in the 22nd century.
OSIRIS-REx will determine Bennu’s physical and chemical properties, which will be critical to know in the event of an impact mitigation mission.
On the more cheerful side, asteroids like Bennu contain natural resources such as water, organics, and precious metals. In the future, these asteroids may one day fuel the exploration of the solar system by robotic and crewed spacecraft.
Site inspection
If the launch of the spacecraft goes as planned, in August 2018 the approach by OSIRIS-REx’s to Bennu will begin, rendezvousing with the space rock.
The spacecraft will begin a detailed survey of Bennu two months after slowing to encounter Bennu.
This “site inspection” process will last over a year, and, as part of it, OSIRIS-REx will map potential sample sites.
Touchy-feely technology
In picking the final site, the spacecraft will then briefly touch the surface of Bennu to retrieve a sample. The sampling arm will make contact with the surface of Bennu for about five seconds, during which it will release a burst of nitrogen gas.

The Touch-and-Go Sample Arm Mechanism (TAGSAM) is tested in a Lockheed Martin facility, developer of the hardware. The TAGSAM arm will be responsible for collecting a sample from Bennu’s surface.
Credit: Lockheed Martin Corporation
This touchy-feely procedure will cause rocks and surface soil to be stirred up and captured in the sampler head.
The spacecraft has enough nitrogen to allow three sampling attempts, to collect between 60 and 2000 grams 2–70 ounces (60–2000) grams.
Back home
In March 2021, the window for departure from the asteroid will open, and OSIRIS-REx will begin its return journey to Earth, arriving two and a half years later in September 2023.
The sample return capsule will separate from the spacecraft and enter the Earth’s atmosphere. It will be slowed by a heat shield and then a parachute, landing at the Utah Test and Training Range.
Lockheed Martin Space Systems Company built OSIRIS-REx at its facility near Denver. NASA’s Goddard Space Flight Center is providing overall mission management, systems engineering and safety and mission assurance for OSIRIS-REx. OSIRIS-REx is the third mission in NASA’s New Frontiers Program. NASA’s Marshall Space Flight Center in Huntsville, Alabama, manages New Frontiers for the agency’s Science Mission Directorate in Washington, D.C.

