Archive for the ‘Space News’ Category

China’s Shenzhou-11 atop Long March booster.
Credit: CCTV
China’s next piloted space mission is ready for liftoff at the Jiuquan Satellite Launch Center in northwest China.
The spacecraft launch is scheduled at 07:30 on Monday, October 17, local Beijing time. (7:30 p.m. eastern time, Sunday)
The Long March-2F carrier rocket to hurl the two-person Shenzhou-11 craft into Earth orbit is under final fueling and checkout processes.
Shenzhou-11 will carry two male astronauts, veteran space traveler, Jing Haipeng and first-time flyer, 38-year old, Chen Dong.

Shenzhou-11 will carry two male astronauts, veteran space traveler, Jing Haipeng (left) and first-time flyer, 38-year old, Chen Dong.
Crew photos: ChinaSpaceflight.com
The 50-year-old Jing will be commander of the mission. It will be Jing’s third spaceflight following his Shenzhou-7 mission in 2008 and Shenzhou-9 mission in 2012.
Month-long voyage
Two days after launch, the spacecraft will dock with the orbiting space lab Tiangong-2. The astronauts will stay in the space lab for 30 days. Doing so would mark the longest-ever spaceflight for Chinese astronauts.

The mission of Shenzhou-11 is a key to improve space station building techniques.
Credit: CCTV
Shenzhou-11 will dock with orbiting space lab Tiangong-2 within two days after launch.
After a month attached to the space lab, the Shenzhou-11 spaceship will separate with Tiangong-2 and return to Earth within one day.

Credit: CCTV
More experiments
The Shenzhou-11 mission aims to transport personnel and materials between Earth and Tiangong-2, and examine rendezvous, docking and return technologies.
In a press conference, Chen Dong described the upcoming mission:
“The features of this mission are long duration with more experiments,” Chen said. “We have improved capacities to deal with on-orbit emergencies, first-aid capacities and capacities to conduct space experiments. I think only when we treat the ground training as the real mission in space, can we be confident and calm enough to deal with the real mission easily as we were trained on the ground,” he said.

Credit: CSU
Veteran space flyer, Jing Haipeng, commander of Shenzhou-11explained:
“As an astronaut to conduct missions more than once, I think it is our dream,” Jing said. “This time I have the honor toconduct my third space mission, and I want to express my thanks for my motherland and the people, for the efforts and support from thousands of aerospace science and technology staff. I will stay true to the mission and do my best to be a good astronaut.”

Credit: CSU
Trio of alterations
At a press conference at the Jiuquan Satellite Launch Center Spokeswoman,Wu Ping said the main functions and technical parameters of Shenzhou-11 remain almost the same as that of Shenzhou-10, she said.
Wu pointed to a trio of alterations that were made to satisfy the coming flight’s needs and further improve its reliability and safety and to verity the future space technology.
“The first is to satisfy the needs of this space flight mission. We adjusted the orbit control strategy and flight procedure. The purpose is to satisfy the needs of the change of the rendezvous docking orbit and return orbit from 343 kilometers to 393 kilometers,” Wu said.
At the same time, she added, the layout of the cargo loading was optimized and adjusted in order to further improve the transportation capabilities of the flight.

Tiangong-2 satellite deployer.
Credit: CSU
“The second is to further improve safety and reliability. We newly mounted the broad-band relay communication terminal. The purpose is to significantly enlarge the coverage rate of the telemetry tracking and communication and elevate the space-and-ground communication support capabilities when the spaceship altitude is changing rapidly,” Wu said. “This thus improved the safety of the astronauts and the reliability of the spaceship.”
Wu said that the third is to verify the future space technology. “To satisfy the space station’s long-life requirements in the future, we made some upgrades in the equipment of docking measurement of Shenzhou-11.”
To watch the launch, go to CCTV-News, China’s preeminent 24-hour English language television channel:

ESA’s mission control in Darmstadt, Germany – ready for ExoMars 2016’s mission to begin.
Credit: ESA
On Sunday, October 16, 2016, the European Space Agency’s ExoMars 2016 Trace Gas Orbiter (TGO) will release its entry, descent and landing demonstrator, Schiaparelli, towards the Red Planet.
ESA will livestream this critical and milestone-making event, starting on October 16th at 10:30 AM Eastern Time.
Go to:
www.esa.int/Our_Activities/Space_Science/ExoMars/Watch_ExoMars_arrival_and_landing

Artist’s impression depicting the separation of the ExoMars 2016 entry, descent and landing demonstrator module, named Schiaparelli, from the Trace Gas Orbiter.
Credit: ESA/ATG medialab
Several missions in one
ExoMars is several missions in one.
Its orbiter is a science and relay mission. The TGO will search for evidence of gases, such as methane, that may be associated with geological or biological processes.
The Schiaparelli lander is a technology demonstrator to test key technologies for future missions to Mars.
The landing site for Schiaparelli is an elliptical region close to the equator in the planet’s Meridiani Planum area.

Artist’s impression of Schiaparelli, the ExoMars entry, descent and landing demonstrator module, as it approaches the Martian surface.
Credit: ESA/ATG medialab
Wobble time
At ESA’s ESOC control centre in Darmstadt, Germany, control teams are preparing for separation of Schiaparelli from the TGO.
For separation, releasing the 1,272 pound (577 kilograms) lander will make TGO wobble. This could affect the very sensitive antenna pointing needed to ensure a full data link, so mission controllers will monitor progress only via the basic radio carrier signal, with the signal acting like a beacon.
To obtain an update on the ExoMars 2016 mission, ESA has issued a set of videos: ExoMars at Mars; Mars arrival orbits; and Schiaparelli’s descent to Mars.
To access these informative videos, go to:
http://livestream.com/ESA/marsarrival/videos

All is go as ESA’s ExoMars 2016 approaches Mars. The ExoMars Trace Gas Orbiter is set to dispatch its entry, descent and landing demonstrator module, Schiaparelli, on October 19.
Credit: ESA/ATG medialab
The European Space Agency’s ExoMars 2016 mission has made its final pre-arrival orbit correction maneuver.
ExoMars 2016 is a two part mission: the Trace Gas Orbiter approaches and enters orbit around the Red Planet, and the Schiaparelli module lands on its surface
Next major milestone is on October 16 with separation of Schiaparelli from the orbiter at 14:42 GMT/ 16:42 CEST.
Separation on Sunday
According to ESA, the October 14th burn was the last push needed to perfectly line the Trace Gas Orbiter (TGO) up on the right orbit to deliver Schiaparelli onto the surface three days after separation on Sunday.
Flight Director Michel Denis reported a very tiny underperformance from TGO’s thrusters, but the burn overall was very good.
The next TGO engine burn is scheduled for 12 hours after separation of Schiaparelli on October 17, raising the TGO’s orbit above Mars.

ESA’s Schiaparelli landing at Meridiani Planum on Mars on October 19, 2016.
Credit: ESA/ATG medialab
On October 19, Schiaparelli is slated to carry out its entry, descent and landing on Mars. Atmospheric entry expected 14:42 GMT / 16:42 CEST, landing 14:48 GMT / 16:48 CEST).

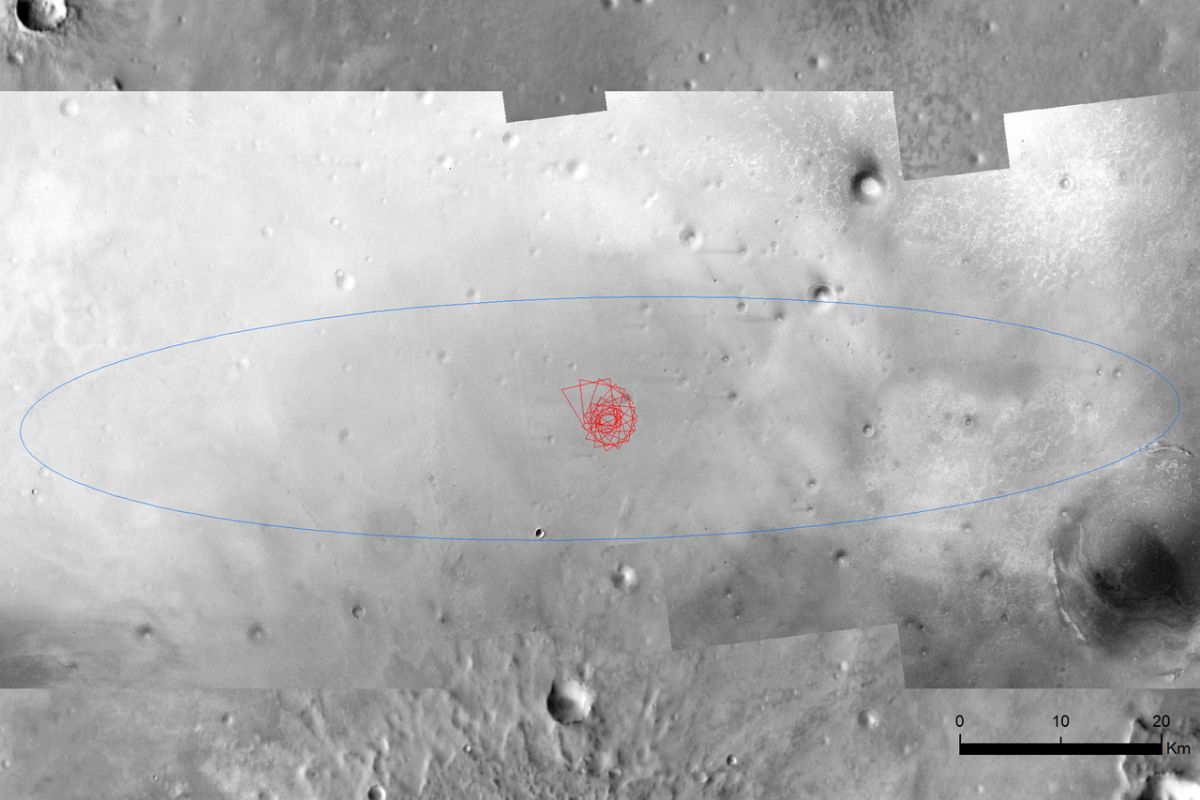
The “footprints” of Schiaparelli’s 15 descent camera images will follow a roughly clockwise order, from larger to smaller fields-of-view. In this simulated view, the first image is taken at about 3 kilometers (km) altitude and covers roughly 17 square km, while the final image is taken at about 1.5 km and covers 4.6 square km. The images are to be taken every 1.5 seconds.
Credit: Background map – NASA/JPL/MRO; simulation: ESA
All go!
Both the TGO orbiter and Schiaparelli demonstration lander are “go” for arrival, according to an ESA statement: “Schiaparelli is GO for entry, descent, landing and surface operations. TGO is GO for Mars orbit insertion.”
ESA’s ExoMars Project Manager Don McCoy said: “People have put their hearts and souls into this. We’re ready to go.”
Live coverage
Live coverage of ExoMars Trace Gas Orbiter arrival and Schiaparelli landing on Mars will begin on October 16 with the separation of the two spacecraft.
Watch all livestreaming events here at:
http://www.esa.int/Our_Activities/Space_Science/ExoMars/Watch_ExoMars_arrival_and_landing

Curiosity Mastcam Left image taken on Sol 1485, October 9, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover has officially chalked up over nine miles of driving since landing on Mars in August 2012.
Now in Sol 1489, the word is that the Mars machinery has wheeled itself up nearly 330 feet (100 meters) of Mount Sharp.
Up and Climbing
Curiosity has reached an elevation that is 100 meters above the Confidence Hills site, where it first encountered the Murray formation.
“That means that in the last two years we’ve climbed through 100 meters of stratigraphy forming the base of Mount Sharp,” notes Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Edgar calls the ascension “amazing progress,” and adds: “Keep climbing Curiosity!”
New drill site
The current plan for rover work is focused on bumping to a next drill location as the robot continues to systematically sample the Murray formation.

Curiosity Navcam Right B image taken on Sol 1487, October 12, 2016.
Credit: NASA/JPL-Caltech
That two-sol plan includes a Curiosity Mastcam look at crater rim extinction to measure atmospheric opacity, Edgar notes. Then Curiosity will acquire several Chemistry and Camera (ChemCam) observations of the targets “Sangwali,” “Orapa,” and “Katima Mulilo” to assess the composition of the local bedrock.
Also on tap is acquisition of two Mastcam mosaics to characterize the lamination style in the Murray. “Then we’ll drive to the intended drill location, and take post-drive imaging to prepare for contact science and drill activities,” Edgar adds. “We’ll also squeeze in a ChemCam calibration activity in the afternoon.”
Rim watch
Sol 1490 is to be relatively quiet, Edgar points out, with a Navcam observation to look for clouds above the north rim of the crater and a Mars Descent Imager (MARDI) image to document the terrain post-drive.

Curiosity Mastcam Left image taken on Sol 1487, October 12, 2016.
Credit: NASA/JPL-Caltech/MSSS
“We’re keeping it light on data volume to prepare for all of the drill activities,” Edgar explains.
From Sol 1485 to Sol 1487, Curiosity drove a straight line distance of about 57.30 feet (17.46 meters).
As of October, 12, 2016 – since touching down on Mars in August 2012 — Curiosity has driven 9.01 miles (14.51 kilometers).
Credit: National Geographic/Griffith Observatory
The Griffith Observatory in Los Angeles, California staged on Friday, October 28th an “All Mars Considered” panel discussion and book signing based on the book and documentary MARS: Our Future on the Red Planet.
Joining Griffith Observatory Curator and evening host of the event, Laura Danly, is Leonard David, Rob Manning, and Andre Bormanis.
The newly released book — MARS: Our Future on the Red Planet – is authored by Leonard David. This book considers the imminent settlement of humans on Mars as part of a major National Geographic Mars initiative this fall, including a documentary in partnership with Ron Howard, whose foreword opens the book.

Scene from “Mars,” a National Geographic Channel miniseries due to air in November.
Credit: National Geographic, Imagine, RadicalMedia, Robert Viglasky
Event horizon
Rob Manning is JPL’s Engineering and Science Directorate Chief Engineer and has taken us — or our robot proxies — to Mars again and again over the past decade.
Andre Bormanis is co-executive producer of the unique television documentary-drama series, MARS set to air in November on the National Geographic Channel.
“All Mars Considered” was held at Griffith Observatory’s Leonard Nimoy Event Horizon.
The Friday, October 28th discussion is now on Griffith Observatory TV.
Go to:
http://livestream.com/GriffithObservatoryTV/AMC2016
For more information on Griffith and its events, go to:

Approximate region in box where Schiaparelli lander may be visible above horizon by Opportunity if incoming vehicle goes long.
Credit: James Rice/MER/JPL
Call it the Schiaparelli sky show – and if you happen to be NASA’s Opportunity Mars rover, it’s coming to a sky near you.
On October 19th, the European Space Agency’s (ESA) ExoMars 2016 entry, descent and landing demonstrator module is set to plunge through the Martian atmosphere, descend and land on the planet’s landscape, all within six minutes.
Its descent involves use of a heatshield, parachute, thrusters and a crushable structure for the landing.

Artist impression of the Schiaparelli module on the surface of Mars.
Credit: ESA
Robotic eye-witness
The information gleaned by Schiaparelli during this short period is designed to test and demonstrate technologies required to deliver a lander or rover safely onto the surface of the Red Planet.
Once released by its mothership – ESA’s Trace Gas Orbiter – on October 16th, the Schiaparelli is targeted to plop down in a relatively flat area in Meridiani Planum, close to the equator in the southern hemisphere.
This region has been imaged extensively from orbit, including by ESA’s Mars Express and NASA’s Mars Reconnaissance Orbiter.

Opportunity rover’s current location at Spirit Mound. Will it catch the Schiaparelli sky show?
Courtesy: James Rice/MER/JPL
In position as a robotic eye-witness to the craft’s landing is the Opportunity rover.
West toward the east
The Schiaparelli Entry, Descent and Landing Demonstrator Module (EDM) will enter the Martian atmosphere and be moving from the west toward the east in the sky above its landing site in Meridiani Planum.
That’s the spot where NASA’s Opportunity rover landed in early 2004 and is currently exploring Endeavour Crater in its 10th extended mission, explains astrogeologist Jim Rice, Mars Exploration Rover geology team leader and senior scientist at the Planetary Science Institute in Tucson, Arizona.

Credit: Spacecraft – ESA/ATG medialab; simulated views based on NASA MRO/CTX images (credit: NASA/JPL/MRO); landing ellipse background image: THEMIS daytime infrared map from Mars Odyssey; simulation: ESA
Remote chance
“We will attempt to image Schiaparelli as it arrives in our neck of the woods on October 19th,” Rice told Inside Outer Space. “But if the entry and descent of the Schiaparelli EDM is nominal, the Opportunity rover will not see anything because its path will be blocked by the topography of the western rim of Endeavour crater,” he said.
“However, there is a remote chance we could see it above the crater rim if the descent trajectory is long toward the east,” Rice added. “Bottom line is that we will be giving it our best effort and, hopefully, we get lucky.”
Credit: central region: NASA/JPL/MRO; background image: THEMIS daytime infrared map from Mars Odyssey; simulation: ESA
Approaching surface shots
Meanwhile, as the ExoMars Schiaparelli module descends onto Mars it will capture 15 images of the approaching surface, notes ESA. Scientists have simulated the view seen from the module’s descent camera.
Those 15 black and white images snapped by a small camera named DECA — the DEscent CAmera — during Schiaparelli’s descent can be used to reconstruct the module’s trajectory and its motion, as well giving context information for the final touchdown site.
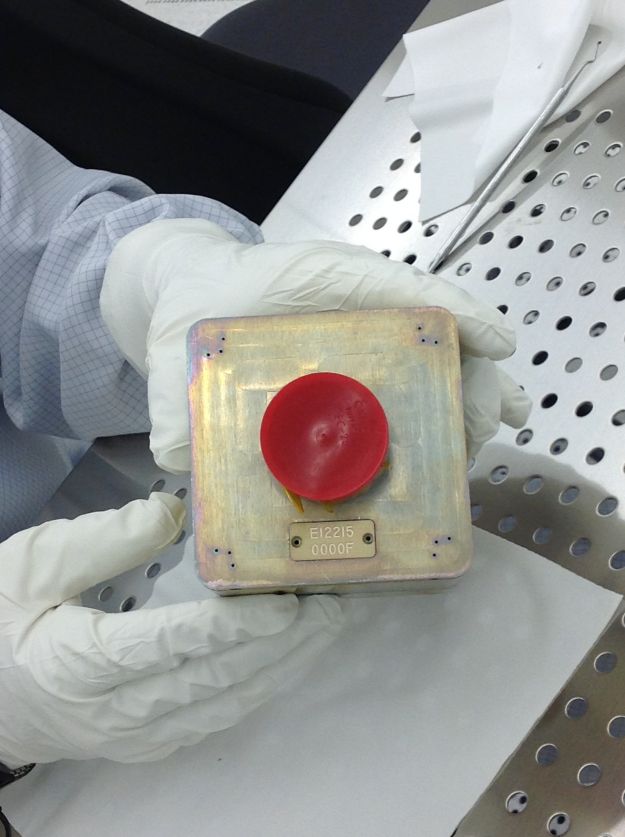
Pre-checkout with protective lens cap on, the DEscent CAmera (DECA) on Schiaparelli, the ExoMars 2016 entry, descent and landing demonstrator module.
Credit: ESA
DECA will start taking images after the front-shield of Schiaparelli has been jettisoned during the journey through the Martian atmosphere to the planet’s surface. It will take the 15 images at 1.5 second intervals.
Local memory
The images will be stored in the vehicle’s local memory. To avoid electrostatic discharges affecting the instrument, there will be a delay of several minutes after Schiaparelli has landed on the surface of Mars, before the data are read out by Schiaparelli’s computer and subsequently downlinked to Earth.
DECA was designed and built by Optique et Instruments de Précision (OIP) in Belgium for ESA.
ESA’s Schiaparelli landing at Meridiani Planum on Mars on October 19, 2016.
Credit: ESA/ATG medialab
Cooperative project
The ExoMars effort is a cooperative project between ESA and Russia’s Roscosmos.
ExoMars 2016 comprises two missions: the Trace Gas Orbiter and the Schiaparelli entry, descent and landing demonstrator module, which were launched on March 14, 2016.
The follow-on ExoMars rover and surface platform is scheduled for launch in 2020.
Take a look at this simulated landing video at:

Credit: NASA/Langley
Mark your calendar for the White House “Frontiers Conference” – an October 13th event that brings together the Nation’s top innovators to discuss how new frontiers in science and technology will help improve lives and shape the future.
A featured aspect of the webcast day is “Interplanetary Frontiers” designed to reach out to the “final frontier” and the next stage of space exploration, including the journey to Mars.

Credit: Bob Sauls – XP4D/Explore Mars, Inc. (used with permission)
Five frontiers
The unique program embraces voices from five frontiers of innovation—personal, local, national, global, and interplanetary.
From developing personalized treatments for diseases like Alzheimer’s or cancer, to harnessing the power of artificial intelligence to improve lives, to sending humans to Mars, the conference will explore innovations that hold the potential to address some of the world’s most pressing challenges and keep America on the cutting edge.
Access to space
A discussion on increasing access to space is on tap with panelists including NASA Deputy Administrator Dava Newman, Erika Wagner from Blue Origin, and Anousheh Ansari, the first female private space explorer.

Blue Origin’s New Shepard booster takes flight.
Credit: Blue Origin
Other space-related speakers include:
- Ellen Stofan, Chief Scientist, NASA
- Rod Roddenberry, Jr., CEO of Roddenberry Entertainment and Founder of the Roddenberry Foundation
- George Whitesides, CEO, Virgin Galactic
Other speakers will include: Moon Express; Space Systems Loral; The Tauri Group; Jet Propulsion Laboratory; Adler Planetarium; Vanderbilt University; Planet, Made in Space; Astrobotic/CMU; and University of Colorado.

WIRED up
U.S. President Obama will travel to Pittsburgh, PA, on October 13 to host the White House Frontiers Conference.
The convening will include topics inspired by the November issue of WIRED, which is guest-edited by the President on the theme of “Frontiers.” The conference will focus on building U.S. capacity in science, technology, and innovation, and the new technologies, challenges and goals that will continue to shape the 21st century and beyond.
The White House is co-hosting the Frontiers Conference with the University of Pittsburgh and Carnegie Mellon University (CMU).
For more information on this webcast event, go to:
http://www.frontiersconference.org/
For specifics on the interplanetary track, go to:

The first X-37B Orbital Test Vehicle waits in the encapsulation cell of the Evolved Expendable Launch vehicle on April 5, 2010 at the Astrotech facility in Titusville, Fla. Half of the Atlas V five-meter fairing is visible in the background.
Credit: U.S. Air Force
The secretive mission of the United States Air Force’s X-37B space plane has cruised by 500 days of operation in Earth orbit.
The robotic mini-space plane was sent spaceward on the program’s fourth flight on May 20, 2015, orbited by a United Launch Alliance Atlas V rocket from Florida’s Cape Canaveral Air Force Station, kicking off a mission dubbed OTV-4 (short for Orbital Test Vehicle-4).
What the winged space plane’s on-orbit duties are continue to remain a tight-lipped affair, and how long the vehicle will remain in orbit has not been detailed.
Track record
The first OTV mission began April 22, 2010, and concluded on Dec. 3, 2010, after 224 days in orbit. The second OTV mission began March 5, 2011, and concluded on June 16, 2012, after 468 days on orbit. The OTV-3 mission chalked up nearly 675 days in orbit.

A third mission of the Boeing-built X-37B Orbital Test Vehicle was completed on Oct. 17, 2014, when it landed and was recovered at Vandenberg Air Force Base in California following a successful 674-day space mission. The upcoming space plane flight – on the program’s fourth mission — may land at the Kennedy Space Center in Florida.
Credit: Boeing
There is no word on where the craft will wheel to a full-stop. In the past, all three X-37B missions ended at Vandenberg Air Force Base in California, gliding to a landing strip on auto-pilot.
New landing site?
Progress has been made, however, to consolidate its space plane operations, including use of NASA’s Kennedy Space Center (KSC) in Florida as a landing site for the X-37B. A former KSC space-shuttle facility known as Orbiter Processing Facility (OPF-1) was converted into a structure that will enable the Air Force “to efficiently land, recover, refurbish and relaunch the X-37B Orbital Test Vehicle (OTV),” according to Boeing.

Recovery crew members process the X-37B Orbital Test Vehicle at Vandenberg Air Force Base after the program’s third mission complete.
Credit: Boeing
The X-37B vehicle development falls under the Boeing Space and Intelligence Systems in El Segundo, California, the firm’s center for all space and experimental systems and government and commercial satellites.
The Air Force Rapid Capabilities Office is leading the Department of Defense’s OTV initiative, by direction of the Under Secretary of Defense for Acquisition, Technology and Logistics and the Secretary of the Air Force.
Fleet size
Only two reusable X-37B vehicles have been confirmed as constituting the fleet. This current OTV-4 trek is the second flight of the second X-37B vehicle built for the Air Force by Boeing.
Looking like a miniature adaptation of NASA’s now-retired space shuttle orbiter, the reusable military space plane is 29 feet (8.8 meters) long and 9.6 feet (2.9 meters) tall, and has a wingspan of nearly 15 feet (4.6 meters).
The space drone has a payload bay about the size of a pickup truck bed. It has a launch weight of 11,000 pounds (4,990 kilograms) and is powered on orbit gallium arsenide solar cells with lithium-ion batteries.

Air Force X-37B robotic space plane is shown after Vandenberg AFB landing. Third mission of the program is now being flown in Earth orbit – the longest duration flight of the winged spacecraft.
Credit: USAF/Boeing
Onboard payloads
A few payloads onboard the OTV-4 craft have been identified.
Aerojet Rocketdyne has announced that its XR-5A Hall Thruster had completed initial on-orbit validation testing onboard the X-37B space plane.
It is also known that the vehicle carries a NASA advanced materials investigation, as well as an experimental propulsion system developed by the Air Force.

Former shuttle processing area at the Kennedy Space Center has been overhauled by Boeing to prep the military’s secretive X-37B space plane.
Credit: Malcolm Glenn
“It remains a very useful way to test out things,” Winston Beauchamp, deputy undersecretary of the Air Force for Space told Inside Outer Space during last month’s American Institute of Aeronautics and Astronautics (AIAA) meeting in Long Beach, California.
Asked about any interest in increasing the X-37B fleet size, Beauchamp said that the number of vehicles in use is fine due to the pace of experiments it conducts.
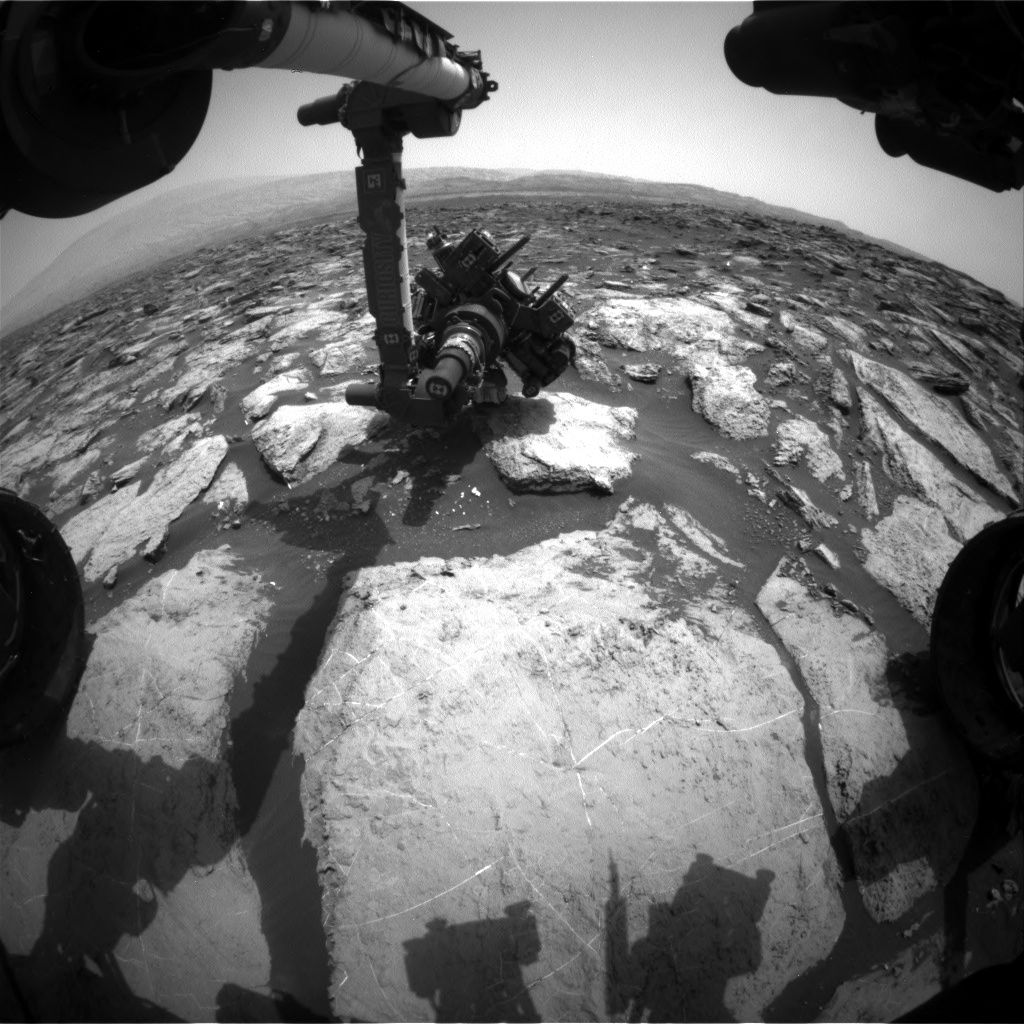
Curiosity Front Hazcam Right B image taken on Sol 1484, October 8, 2016.
Credit: NASA/JPL-Caltech
Now in Sol 1485, NASA’s Curiosity rover recently made a drive of over 130 feet (40 meters) up the flank of Mt. Sharp on Sol 1482.
After that trek, the rover was in position to explore multiple bedrock blocks within reach of the robot’s arm for carrying out a weekend plan, reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Brush off
A smooth patch on a nearby block named “Serowe” was selected for brushing by the rover’s dust removal tool (DRT).
The Sol 1484 plan includes two dropoffs of the latest drill sample to the Sample Analysis at Mars (SAM) Instrument Suite. A full suite of Mars Hand Lens Imager (MAHLI) images are on tap to be taken, along with a short Alpha Particle X-Ray Spectrometer (APXS) measurement of “Tobane,” another bedrock block.

Curiosity Mars Hand Lens Imager (MAHLI) photo taken on October 6, 2016, Sol 1482.
Credit: NASA/JPL-Caltech/MSSS
New drive on schedule
Herkenhoff notes the plan calls for APXS to be placed on Serowe for an overnight integration. Early the next morning, the robot’s Navcam was to search for clouds and dust devils, and Mastcam will measure the amount of dust in the atmosphere.
Later on Sol 1485, the arm was to be stowed to allow Chemistry & Camera (ChemCam) and Mastcam observations of Serowe and Tobane. The rover’s Right Mastcam is to acquire a mosaic of laminated bedrock dubbed “Masunga.”
Then another drive is planned, along with the usual post-drive imaging.

Rover wheel damage is surveyed by Curiosity’s Mars Hand Lens Imager (MAHLI). Photo taken on October 6, 2016, Sol 1482.
Credit: NASA/JPL-Caltech/MSSS
Auto-science
The Autonomous Exploration for Gathering Increased Science (AEGIS) software is slated to be used to select a ChemCam target on Sol 1486, and Mastcam will again measure dust in the atmosphere.
Finally, Curiosity will sleep in preparation for Monday’s activities, Herkenhoff adds.
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Nearing 9 miles of travel since August 2012 landing.
Credit: NASA/JPL-Caltech/Univ. of Arizona
New map
A new map has been issued showing the Curiosity rover’s location for Sol 1482.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1482 Martian day, or sol, of the rover’s mission on Mars.
Numbering of the dots along the line indicate the sol number of each drive. North is up.
From Sol 1480 to Sol 1482, Curiosity had driven a straight line distance of about 127.51 feet (38.87 meters).
Since touching down in August 2012, Curiosity has driven 8.98 miles (14.45 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

China’s Shenzhou-11 piloted spacecraft in testing.
Credit: CCTV/framegrab via GBTimes.
China is readying its Shenzhou-11 piloted spacecraft for a mid to late month sendoff.
The craft will dock with the recently launched Tiangong-2 space lab, and two still-unnamed male astronauts will stay in the space lab for 30 days before returning to Earth.
“This is going to provide evidence of astronauts’ long-term stay in space for the development of China’s space station in the future,” explains Lei Fanpei, chairman, China Aerospace Science and Technology Corporation in a recent CCTV-Plus interview.

China’s 60-ton medium-size space station is depicted in this artwork.
Credit: CNSA
China plans to build the world’s third “orbit-assembled” space station in the 2020s.
Booster business
After the launch of the Shenzhou-11, China will conduct the maiden flight of China’s powerful new entry in the booster business. Flight of the Long March-5 is slated for early November. It is the largest carrier rocket that the country has ever built.
“The Long March-5 has the ability of carrying 25 tons of equipment into the low Earth orbit,” Lei notes. The application of a new major structure with a five-meter-diameter and the new engine using liquid oxygen/hydrogen and liquid oxygen/kerosene propellants, the carrying capacity of the Long March-5 has been greatly improved.
“It is currently undergoing technical tests at the Wenchang Satellite Launch Center in Hainan. It is estimated that the rocket will be positioned onto the launch pad by the end of October. The core module of the future space station will be launched by this rocket, as well as the Chang’e-5 lunar probe. So the launch of the Long March-5 will be of great importance to China’s development of its space station and the exploration of deep space,” adds Lei.

Credit: CCTV/China Spaceflight.com
Mars parachute test
In related news, GBTimes has reported that China recently tested an experimental supersonic, low density parachute for use in its robotic Mars exploration program.
That test involved a Tianying sounding rocket, launching the sub-scale test parachute to high altitude above Earth to simulate conditions within the thin Martian atmosphere.
According to the Finland-based GBTimes, the flight test gathered aerodynamic data useful for evaluating a full-sized parachute for Mars duty. The test was performed by the Academy of Aerospace Solid Propulsion Technology under the China Aerospace Science and Technology Corporation .
China is aiming to hit the Mars launch window of 2020, rocketing toward the Red Planet a combination orbiter, lander and a rover.
For a video report on China’s upcoming space agenda, go to:
http://l3-pv.news.cctvplus.com/2016/1008/8033870_Preview_1475896857154.mp4
Also, check out this CCTV video courtesy of GBTimes on the supersonic parachute test for 2021 Mars landing. Go to:

