Archive for the ‘Space News’ Category

Credit: CCTV-Plus
Along with the booming sound of departing rockets, space tourism is booming in a south China city – at the Wenchang Satellite Launch Center.
The Wenchang launch center is China’s one-of-a-kind coastal launch site. This center will support the country’s space station construction activities in the 2020s, as well as hurling large exploration probes to the Moon – such as the Chang’e-5 lunar sample return mission later this year.
2016 launches
Construction of the site began in Sept 2009 and was completed in Nov 2014. The center has already seen the launch of the Long March-7 last June and the Long March-5 in November 2016.
Wenchang has two vertical assembly and testing plants, two launch towers, a command building and other facilities.
Visitors to the launch complex are shuttled to a launch tower with more areas reportedly opening to the public in the future.
Visitor increase
As reported on CCTV-Plus: “We’re averaging 100 to 200 tourists every day, consisting of locals, who live in Hainan, before November, and tourists who came here in the winter after November,” observed Wang Xiaojia, deputy manager of Wenchang Tourism Investment Holding Co., Ltd.

Credit: CCTV-Plus
The number of tourists in 2016 increased 15 percent year on year since the establishment of Wenchang Satellite Launch Center in 2014, according to the local tourism department.
Tourism town
Construction of a new “tourism town” is underway, reports CCTV-Plus, scheduled to be put into use in the first half of 2017.
In addition to a science and technology exhibit, the town will also use advanced technology — such as visual reality — to enable tourists to experience a realistic rocket launch space exploration missions.
To view a video clip on Wenchang tourism, go to:
http://cd-pv.news.cctvplus.com/2017/0130/8041988_Preview_2751.mp4

This artist’s rendering depicts NASA’s Mars 2020 rover, with its robotic arm extended.
Credit: NASA/JPL-CALTECH
NASA’s next Mars rover – known as Mars 2020 – has fallen under the watchful eye of the space agency’s Office of Inspector General, or IG.
It’s the role of the IG to conduct objective oversight of NASA programs and operations and independently report to the Administrator, Congress, and the public to further the Agency’s accomplishment of its mission.
In a new IG report on the Mars 2020 effort, a number of concerns have been identified, such as design stability of some of the rover’s hardware and science instruments, the rover’s actuators, and growth in the mass of the rover.
These and other issues, the IG reports in a just-issued report, may affect Mars 2020 Project managers need to achieve the mission’s technical objectives, meet Project milestones, and control costs.
Overly optimistic
As noted in the IG document, since 1964, NASA has spent more than $21 billion on missions exploring Mars, including four robotic rovers on the Martian surface, five static landers, and numerous satellite missions orbiting the planet.
Now in development, the Mars 2020 rover has several schedule-related issues that could indicate the Project is “overly optimistic,” the IG report explains.
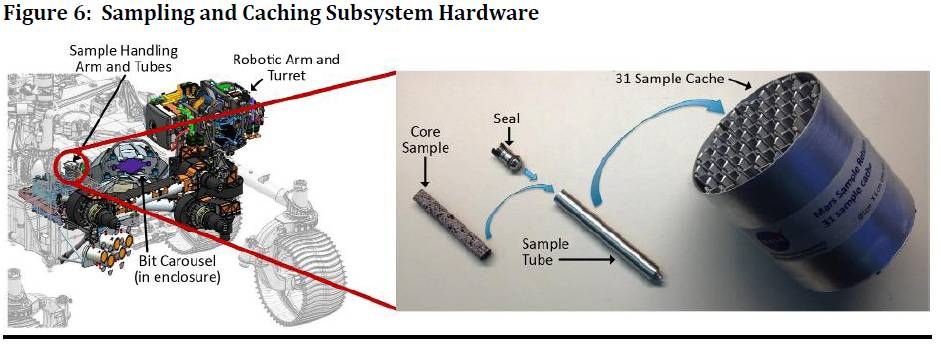
Caching hardware for Mars 2020 rover is depicted, but is a preliminary design that in December 2016 project personnel said was replaced with an alternative design.
Credit: NASA
Largest risk
According to the IG, the largest risk to the Mars 2020 schedule is the Project’s Sample and Caching Subsystem (Sampling System), which will collect core samples of Martian rocks and soil and place them on the planet’s surface for retrieval by a future robotic or human mission.
Three of the Sampling System’s critical technologies were below technology readiness level (TRL) 6 – meaning the prototype had not yet demonstrated the capability to perform all the functions required.
The report does note that by December 2016, Mars 2020 project personnel were showing all seven technologies as having reached TRL 6.
Other challenges
Several other challenges confront Mars 2020 project managers, the IG document reports, “including late delivery of actuators (the components responsible for moving and controlling parts and instruments on the rover); foregoing an engineering model of the Mars Oxygen In-Situ Resource Utilization Experiment (MOXIE) designed to assess the feasibility of producing oxygen on Mars as a cost savings measure; ensuring the rover does not exceed its designed mass limit of 1,050 kilograms; and addressing foreign partner funding issues that may affect their ability to timely deliver components to the Project.”

Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1591, January 26, 2017.
Credit: NASA/JPL-Caltech/MSSS
Mass monitoring
Within the IG report there’s note of a redesign of the rover’s wheels to minimize the premature wear and tear the now-on-Mars Curiosity rover has experienced.
The redesigned wheels are twice as thick as Curiosity’s and add 22 pounds (10 kilograms) of mass to the Mars 2020 rover. Mars 2020 engineers are considering software changes that could improve the rover’s ability to match wheel drive with the terrain.
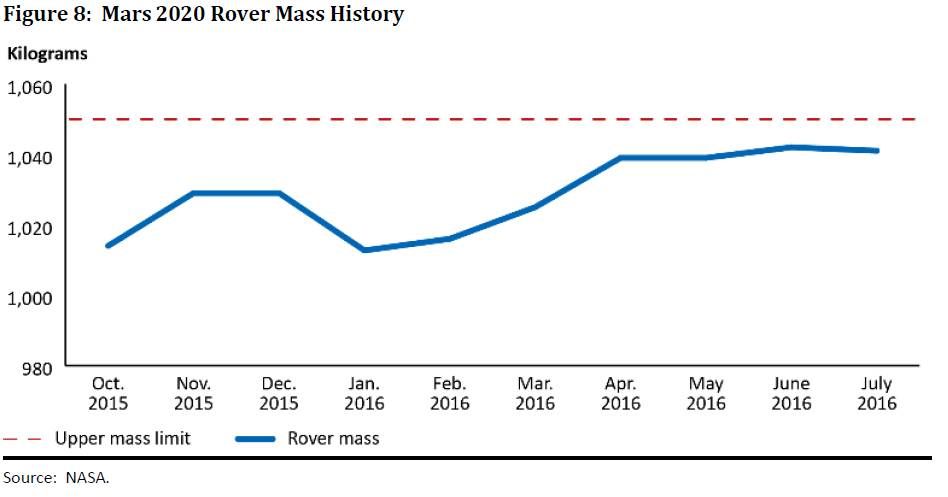
Credit: NASA IG
Noted in the IG document, although project managers do not foresee further mass growth of the Mars 2020 rover, they are monitoring the mass and volume of the turret. They indicated that, if necessary, additional steps can be taken such as removing a proposed helicopter technology demonstration from the mission to keep the mass below 2,315 pounds (1,050 kilograms).

Proposed helicopter for Mars 2020 rover may be scrapped.
Credit: NASA/JPL-CALTECH
Planned actions
NASA has concurred with IG recommendations and has described planned actions, as detailed in the report.
“We provided a draft of this report to NASA management who concurred with our recommendations and described planned actions to address them,” the IG report states.
To read the full OIG report – NASA’s Mars 2020 Project – issued January 30, 2017, go to:
https://oig.nasa.gov/audits/reports/FY17/IG-17-009.pdf

If successful, the Axiom International Commercial Space Station is billed as a “historic shift” in human spaceflight.
Credit: Axiom Space
Work is underway to orbit the world’s first private, international commercial space station, a complex that would serve a global community of sovereign and private astronauts.
The Axiom International Commercial Space Station is being pursued to enlarge the landscape of low Earth orbit, to create what they view as a “historic shift” in human spaceflight.

The Axiom International Commercial Space Station is intended to serve as a complex for astronauts, research and manufacturing missions. It can also become a base for trial-running deep space systems.
Credit: Axiom Space
By making the microgravity of space available to nations, organizations and individuals, living and working in Earth orbit can become commonplace, Axiom believes, to not only cater to markets here on Earth but also support deep space exploration.
For more information on Axiom planning, I invite you to go to my new Space.com story:
Private Space Station Coming Soon? Company Aiming for 2020 Launch
http://www.space.com/35488-private-space-station-2020-axiom-space.html

Shackleton Crater located on the south pole of the Moon. The Lunar Temple visible as bright dot on the left side.
Credit: Jorge Mañes Rubio/DITISHOE
Serenity now!
Future lunar dwellers may find solace atop a near-perpetually sunlit peak close to the Moon’s south pole – in a temple to celebrate the Moon as a powerful symbol of unity for humankind.
The temple would be built on the sunlit rim of Shackleton Crater, which is bathed much of the time in sunlight while overlooking the crater’s deep interior of everlasting shadow.
Shackleton crater has a diameter of 13 miles (21 kilometers) and is over 2.6 miles (4.2 kilometers) deep. This site is a potential candidate for a future outpost on the Moon due to its unique lighting conditions.

Credit: Jorge Mañes Rubio/DITISHOE
Symbol of unity
While some of its peaks receive almost continuous sunlight, its interior (one of the coldest and darkest places in the Solar System) may have captured water ice, key for a self-sustainable lunar settlement, explains an ESA statement on the temple concept.
A European Space Agency’s Advanced Concepts Team (ACT) includes the artistic touches of Jorge Mañes Rubio – the group’s artist in residence. His “Peak of Eternal Light art project” involves a “Moon Temple.” It is a structure meant to be a symbol of unity for humankind, reflecting the pull that our natural satellite has always had on the human imagination.
“So this Temple is intended as a mythic and universal structure that can hopefully bring people together in this new environment in novel ways,” Rubio explains.

Credit: Jorge Mañes Rubio/DITISHOE
Abode architecture
The nearly 165 foot (50 meters) high domed structure is envisioned by ESA materials specialists as a possible structure put in place in one-sixth gravity by 3D printing of lunar soil. The result might resemble “abode” architecture, Rubio adds, an ancient method of building that is still made use to this day.
Leopold Summerer, head of the ACT explains that these contemplative ideas about future lunar facilities “have been very valuable and stimulating, since they lead us to consider aspects of human exploration that aren’t usually considered by scientists and engineers.”
The Temple’s free-standing dome would allow patrons to view Earth for two weeks at a time, Rubio points out, inspiring more independent thinking. One opening in the dome will look Earthwards, while another at the top will peer out into deep space.

Artist Jorge Mañes Rubio.
Photo credit: Bret Hartman
Next steps
As a next step, Rubio aims to create small sculptures and “artefacts” out of simulated lunar materials, inspired by the simulated lunar environment at ESA’s European Astronaut Centre near Cologne, Germany.
Meanwhile, Johann-Dietrich Woerner, ESA’s Director General, has been very vocal on establishing a “Moon Village” – a robotic and human presence on the Moon, given the eventual decommissioning in 2024 of the International Space Station.
Rubio continues to work on his Peak of Eternal Light art project. An interactive VR experience and digital app is being planned. This free app will allow anybody to virtually travel to the south pole of the Moon and explore Shackleton crater in all its glory.
Resources
Peak of Eternal Light and the Moon Temple is an art project created by Jorge Mañes Rubio as artist in residence at the European Space Agency (ESA). Spatial design and visualization in collaboration with DITISHOE.
Take a look at this engaging video regarding the project:
https://www.youtube.com/watch?v=e8xqyromeL8
or

Candidate and confirmed RSL sites in the hydrated sulfate layered deposits or in craters near the layered
deposits. Background map is Mars Orbiter Laser Altimeter (MOLA) topography.
Credit: Stillman, et al.
One of the more intriguing findings on Mars of late has been spotting recurring slope lineae in certain areas of the Red Planet.
These dark fingers of mystery – RSL in Mars shorthand — emerge from steep, rocky exposures. They incrementally grow, fade, and reform on a seasonal basis.
But what RSL truly represent is controversial. Some researchers say they are suggestive that liquid water occurs on or near the surface of Mars today.
More to the point are RSL created via brine or just small rock/debris falls?
Opportunity rover observation
The upcoming 48th Lunar and Planetary Science Conference (LPSC), to be held March 20-24 in The Woodlands, Texas, promises to be a meeting of the minds on enigmatic RSL.

(Left) This HiRISE image shows the darkest and longest candidate RSL at Cape Victory on the SW rim of Victoria crater. Other HiRISE images show these candidate RSL recurring and fading.
(Right) False color Pancam image from Opportunity (MER-B) at Cape Verde on 04 November 4, 2006. This image shows the candidate RSL beneath Cape Victory as viewed by the rover. The arrow points to the same candidate RSL in (a) and (b).
Credit: Stillman, et al.
For example, new research is being presented that NASA’s Opportunity rover has detected candidate RSL sites in Cape Victory on the southwest side of Victoria crater and on the east side of Endeavour Crater.
Opportunity is a true veteran of Mars exploration. The wheeled robot just cruised past 13 years of service on the Red Planet; it landed on Mars on January 24, 2004.
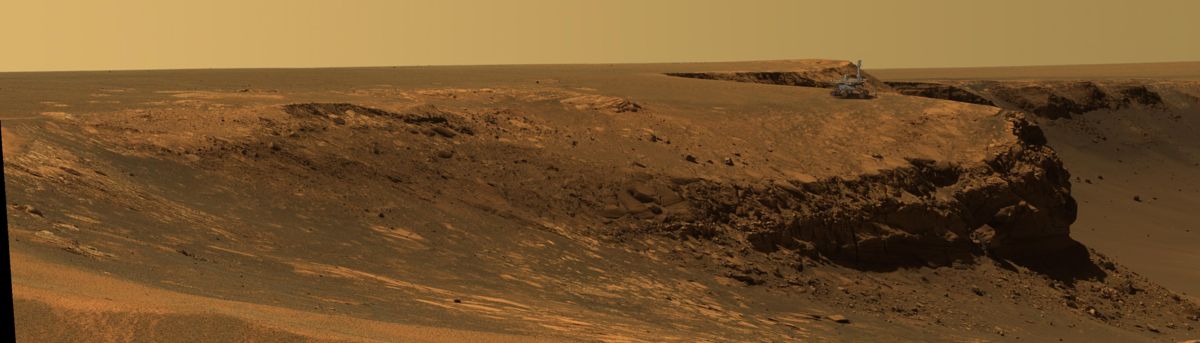
Superimposed Opportunity rover on Rim of Victoria Crater (Artist Concept).
Credit: NASA/JPL-Solar System Visualization Team
The rover is now heading south, across rough and steep terrain, along the rim of Endeavour Crater. Its current scientific objective is to investigate a gully about a kilometer south of its current location.
As of Sol 4623 (Jan. 24, 2017, the total odometry for Opportunity since landing is 27.26 miles (43.87 kilometers).
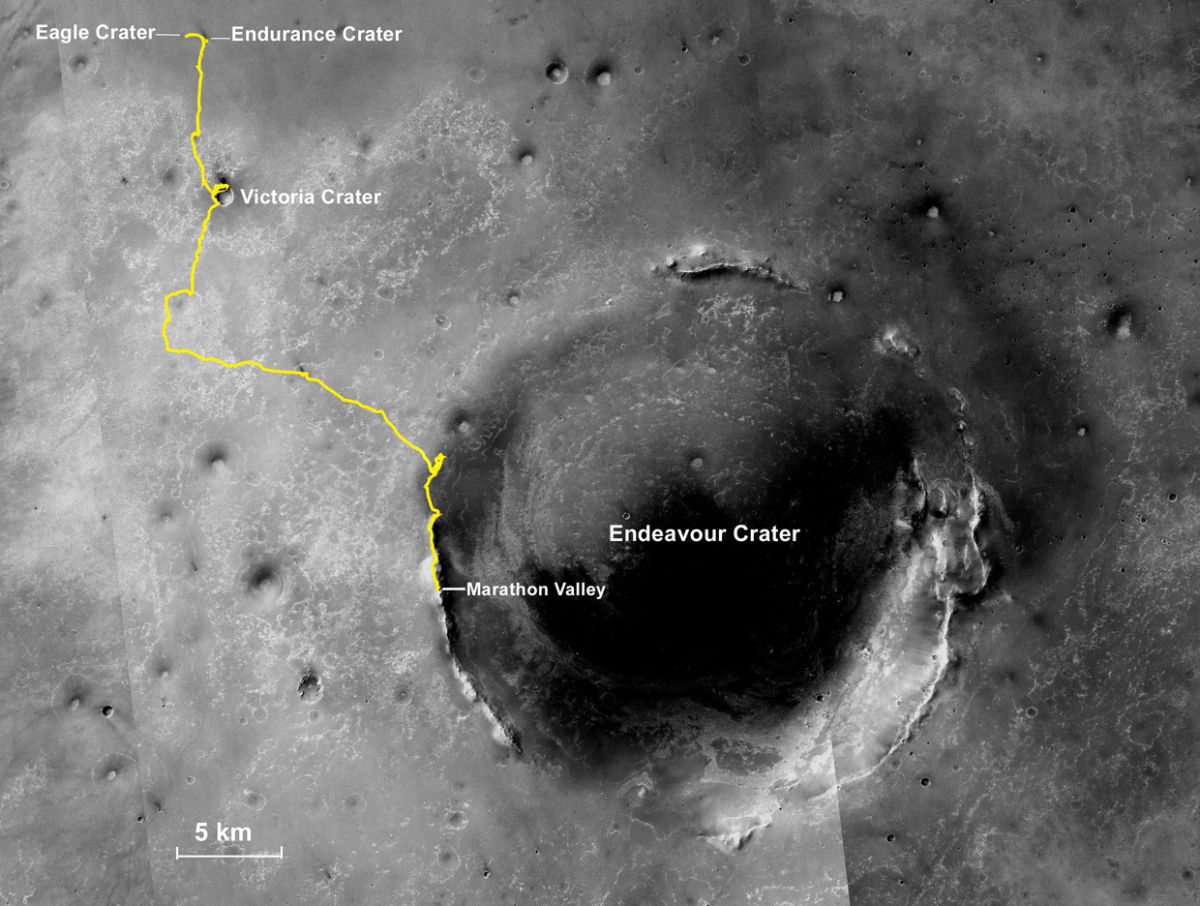
Opportunity traverse map.
Credit: NASA/JPL
Serendipitously imaged
Research led by David Stillman of the Southwest Research Institute in Boulder, Colorado, is to be presented at the LPSC – including a look at the first image of a candidate RSL recorded from the surface of Mars.
This feature was serendipitously imaged via the Panoramic Camera (Pancam) on Opportunity at Cape Verde back in November 2006, Stillman and his colleagues report.
The candidate RSL in Cape Victory is roughly 40 feet (12 meters) long and has been seen in over a dozen Mars Reconnaissance Orbiter HiRISE (High Resolution Imaging Science Experiment) images. Those images show recurrence and fading of the feature, but no incremental lengthening.
Confirmed, candidate sites
In introducing their research, Stillman and his fellow researchers note: “To gain insight into the formation and recharge mechanism(s) of recurring slope lineae (RSL), we have been using HiRISE images to search for candidate RSL sites. As of the December 2016 HiRISE release, we have cataloged 577 candidate RSL sites, of which 74 have been confirmed to exhibit RSL.”

Built by Ball Aerospace, the HiRISE camera system on the Mars Reconnaissance Orbiter yields unmatched views of layered materials, gullies, channels, and other science targets and also characterizes possible future landing sites for robotic and human missions.
Credit: NASA
Confirmed sites show recurrence, incremental lengthening, and fading of dark lineae, the researchers explain, while candidate RSL sites have dark lineae that look like RSL but do not possess all three of the characteristics in available imagery.
Close to Curiosity
Stillman and his research colleagues also note in their LPSC research – “Dark Lineae on the Equatorial Layered Deposits; Are these Recurring Slope Lineae (RSL) or Small Debris Flows?” — that candidate RSL near the Curiosity Mars rover have been detected to fade and recur.
This site is roughly 3 miles (5 kilometers) from Curiosity’s current locale, with plans for the rover to drive much closer to the feature, enabling future imaging of the candidate RSL.
In their research, Stillman adds that candidate RSL are detected in most HiRISE images covering layered deposits with hydrated sulfates.

Self image taken by NASA’s Curiosity Mars rover.
Can it probe makeup of RSL? Credit: NASA/JPL-Caltech
Exploration implications
“If additional HiRISE images are able to confirm that RSL are being formed at locations where groundwater reached and altered the surface billions of years ago, this finding would support the hypothesis that RSL are formed and recharged via groundwater and that discharge groundwater is accessible to search or extant life or to be used as a resource for human exploration,” the researchers conclude.
Alternatively, the research team adds, “if these dark lineae never show incremental lengthening, fading, and recurrence, then we conclude that dark lineae in the hydrated sulfate layered deposits are debris flows. This would suggest these layered deposits are weak and could be used to chemically extract water from as a resource for human exploration.”

Curiosity Mastcam Left image taken on Sol 1591, January 27, 2017.
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 1593, NASA’s Curiosity Mars rover is set to carry out an agenda of science duties.
The Red Planet robot drove 26 feet (8 meters) on Sol 1591, with this weekend’s plan calling for additional driving.
Curiosity has carried out a wheel inspection, images that show damage given the one-ton rover’s rolling over Martian rocks since landing.
Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1591, January 26, 2017.
Credit: NASA/JPL-Caltech/MSSS
Three sol plan
The three-sol plan — 1593-1595 — starts with a few data management activities for Mastcam and the robot’s Mars Hand Lens Imager (MAHLI), and a recovery sequence to restart the Chemistry & Camera (ChemCam) after it was marked “sick,” reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.

Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1591, January 26, 2017.
Credit: NASA/JPL-Caltech/MSSS
Also on tap is taking Mastcam mosaics of “Dead River” and “Boil Mountain” to investigate laminations within the Murray formation and provide some context imaging of the “Misery” outcrop.
Edgar reports that this duty will be followed by use of MAHLI and the Alpha Particle X-Ray Spectrometer (APXS) to study “Misery” and “Dead River,” with an overnight APXS integration on “Misery.”

Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1591, January 26, 2017.
Credit: NASA/JPL-Caltech/MSSS
Atmospheric opacity
On the second sol, Curiosity is to wake up early for some environmental monitoring observations, including some Navcam movies and Mastcam imaging to assess atmospheric opacity, Edgar adds.
The plan calls for another Mastcam mosaic of “Ireson Hill” to document the stratigraphy with long baseline stereo imaging.

Curiosity Navcam Left B image taken on Sol 1591, January 26, 2017.
Credit: NASA/JPL-Caltech
Contact science
The third sol includes additional environmental monitoring, a drive, post-drive imaging for targeting, and preparing for more contact science.
Edgar says that Curiosity will also perform a Sample Analysis at Mars (SAM) Instrument Suite evolved gas experiment to use the residual derivatization vapor in the sample manipulation system.

Curiosity Navcam Left B image taken on Sol 1591, January 27, 2017.
Credit: NASA/JPL-Caltech
Since landing in August 2012, through Sol 1591, Curiosity has driven 9.53 miles (15.34 kilometers).

Eu:CROPIS – short for Euglena and Combined Regenerative Organic-food Production in Space.
Credit: DLR (CC-BY 3.0)
A satellite is slated for launch later this year that will conduct plant growth experiments in both lunar and Martian gravity.
The spacecraft is Eu:CROPIS – short for Euglena and Combined Regenerative Organic-food Production in Space. Eu:CROPIS is an experiment by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR).
Rotational force
During its mission, the Eu:CROPIS spacecraft will rotate around its own axis at an altitude of over 370 miles (600 kilometers), initially producing the gravitational force of the Moon within it for six months, and will then replicate Martian gravity for another six months.
During this time, tomato seeds will germinate and grow into small space tomatoes under the watchful eye of 16 cameras.

Tomato seeds will germinate and grow into small space tomatoes under the watchful eye of 16 cameras.
Credit: DLR (CC-BY 3.0)
An entire group of microorganisms contained in a trickle filter will use synthetic urine to produce a nourishing fertilizer for the tomatoes; euglena will also be transported on board to supply the hermetic system with additional protection against excess ammonia and to produce oxygen.
LED light will be used to provide the day/night rhythm that the euglena and tomato seed require. A pressure tank will replicate the Earth’s atmosphere.
Local source of fresh food
The satellite, to be lofted via a SpaceX Flacon 9 booster this year, will be controlled by the German Space Operations Center (GSOC), which is operated by DLR in Oberpfaffenhofen near Munich, while the ground station in Weilheim, among others, will handle communications.
“Ultimately, we are simulating and testing greenhouses that could be assembled inside a lunar or Martian habitat to provide the crew with a local source of fresh food,” explains DLR biologist Jens Hauslage, head of the scientific part of the mission in a press statement. “The system would do this by managing the controlled conversion of waste into fertilizer.”

Eu:CROPIS spacecraft undergoes testing.
Credit: DLR (CC-BY 3.0)
Hauslage notes that in a lunar habitat, for instance, the greenhouse would be located in the astronauts’ ‘home’ in a simulated Earth atmosphere. Urine would be one of the waste products the astronauts would produce in abundance. Here, the plants would have to adapt to reduced gravity conditions – the gravitational pull on the Moon is approximately one sixth of what it is on Earth, and on Mars it is around one third.
Space test of technology
Once Eu:CROPIS and its scientific payload reach space, the first stage will be to activate the greenhouse that will simulate a lunar environment. The second greenhouse with Martian gravity will be activated six months later.
By this time, the microorganisms, tomato seeds and euglena will have been exposed to cosmic radiation for six months. That’s the equivalent to a flight to Mars. The DLR Institute of Aerospace Medicine will measure the radiation exposure inside and outside the satellite throughout the entire mission.

DLR technicians work on Euglena and Combined Regenerative Organic-food Production in Space experiment, to be launched later this year.
Credit: DLR (CC-BY 3.0)
“We are using Eu:CROPIS to space test technology for use in habitats on other celestial bodies, but it could be installed just as well in a terrestrial setting,” says Hauslage.
For instance, trickle filters can be fitted to make manure more effective and less odorous. Recycling urine in conurbations, for instance in greenhouses installed in high-rise buildings (vertical farms), would be another possible use.

Curiosity Mastcam Left image taken on Sol 1589, January 24, 2017.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is carrying out science duties during Sol 1591.
The Sol 1589 and Sol 1590 plan went well, with the robot wheeling roughly 102 feet (31 meters).
Still sick
Curiosity’s Chemistry & Camera (ChemCam) remains “sick” and some diagnostic activities are being planned for the upcoming weekend, reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Curiosity Navcam Left B image acquired on Sol 1590, January 25, 2017
Credit: NASA/JPL-Caltech
“We are approaching the Bagnold Dunes,” Anderson adds, “so in order to save time and allow more room for science activities at the dunes, today’s plan does not include a drive.”
Wheel inspection
Instead, on the plan is a Mars Hand Lens Imager (MAHLI) check-up of the rover wheels.

Curiosity Navcam Left B image taken on Sol 1590, January 25, 2017
Credit: NASA/JPL-Caltech
Prior to that wheel inspection, the Sol 1591 plan starts with Alpha Particle X-Ray Spectrometer (APXS) and MAHLI of the bedrock target “Munsungun,” followed by Mastcam of “Daniel Island” and “Chapman.”
Short bump
“After the MAHLI images of the wheels, we will do a short ‘bump’ drive to get in position for weekend science,” Anderson says.
Curiosity’s Sample Analysis at Mars (SAM) Instrument Suite is slated to do an evolved gas experiment overnight.
Then on Sol 1592, the robot’s Navcam is scheduled for a dust devil search and Mastcam has some multispectral images of Hematite Ridge.

Curiosity Navcam Right B image acquired on Sol 1589, January 24, 2017.
Credit: NASA/JPL-Caltech
Mastcam also has a small stereo mosaic of “Maple Mountain.”
Driving distance
A map the Curiosity rover’s location for Sol 1589 was released on January 25.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1589 Martian day, or sol, of the rover’s mission on the Red Planet that began in August 2012.
Numbering of the dots along the map line indicate the sol number of each drive. North is up.

The base image from this map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech
From Sol 1587 to Sol 1589, Curiosity has driven a straight line distance of about 94.78 feet (28.89 meters).
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.53 miles (15.34 kilometers).

Curiosity Navcam Left B image taken on Sol 1588, January 23, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is performing science duties as it works its way through Sol 1589.
This past weekend saw the robot drive roughly 92 feet (28 meters), reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.

Curiosity Navcam Right B image taken on Sol 1587, January 22, 2017.
Credit: NASA/JPL-Caltech
Heavy on observations
The plan for Sol 1589 has the rover continuing its slow ascent of Mt. Sharp. Curiosity’s Chemistry & Camera (ChemCam) remains in a “sick” condition, with ground teams trying to sort out the error that occurred last week.
The upshot is that the robot’s Sol 1589 science block is heavy on Mastcam observations.

Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1586, January 21, 2017. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
After Navcam does an observation to watch for dust devils, Ryan adds that Mastcam will collect mosaics of the targets “Cape Elizabeth,” “Mount Battle,” “Mount Blue,” and “Hematite Ridge.”
Squeezing between rocks
Following this planned duty, Curiosity’s Alpha Particle X-Ray Spectrometer (APXS) is slated to measure the composition of “Cape Elizabeth” and the Mars Hand Lens Imager (MAHLI) is on tap to take supporting pictures.
Once the robot’s arm activity is done the rover will drive about 98 feet (30 meters), squeezing between a couple of large rocks, Ryan notes, toward some bedrock that looks good for more contact science.

Curiosity Mastcam Left image taken on Sol 1587, January 22, 2017.
Credit: NASA/JPL-Caltech/MSSS
After the drive, Curiosity will carry out standard post-drive imaging.

Credit: CCTV-Plus
Work is underway in China to carry out the first Moon-sample return to Earth mission in over four decades.
Liftoff of Chang’e-5 is to occur at the end of November, according to the Xinhua news agency. The robotic craft is to ride atop China’s Long March-5 booster, departing from the Wenchang Space Launch Center in southern China’s Hainan Province.
Four-part probe
According to Chinese news services, the over 8-ton Chang’e-5 is comprised of four parts: the “orbiter” “lander” “ascender” and a “returner” – an Earth reentry module.

Credit: CCTV-Plus
The mission will be China’s first automated Moon surface sampling probe, a mission that involves the first robotic docking in a lunar orbit to transfer collected lunar samples for return to Earth.
The lander will place lunar samples in a vessel in the ascender after the Moon landing. Then the ascender will take off from the lunar surface to dock with the orbiter and the returner orbiting the moon, and transfer the samples to the returner.
The orbiter and returner then head back to Earth, separating from each other far from Earth, with the returner module reentering and parachuting to Earth.

China’s Chang’e 3 lander.
Chinese Academy of Sciences
Past history
If successful, the Chang’e-5 mission would be the first lunar sample return to Earth in over 40 years.
The former Soviet Union successfully executed three robotic sample return missions: Luna 16 returned a small sample (101 grams) from Mare Fecunditatis in September of 1970; February 1972, Luna 20 returned 55 grams of soil from the Apollonius highlands region; Luna 24 retrieved 170.1 grams of lunar samples from the Moon’s Mare Crisium (Sea of Crisis) for return to Earth in August 1976.
Relay station
China plans to fulfill three strategic steps with the launch of Chang’e-5, “orbiting, landing and returning.”
The first spacecraft of China’s Moon program, the Chang’e 1 lunar orbiter, was launched in 2007, after which Chang’e 2 was launched in 2010. Chang’e 3, included a lander and rover and was launched in December 2013, successfully soft-landing on the Moon.

China’s Yutu lunar rover.
Also on the country’s Moon exploration schedule is the launch of the Chang’e-4 lunar probe around 2018.
Chang’e-4 is designed to make the first soft landing on the far side of the Moon, and to conduct an in situ and roving detection and relay communications at the Earth-Moon L2 point, according to the China National Space Administration.
“The country plans to send robots to explore both lunar poles,” said the administration’s vice director Wu Yanhua late last year, adding that plans to send astronauts to the Moon were also being discussed, according to the Xinhua news agency.
Human exploration
Also last year, Tian Yulong, chief engineer of the State Administration of Science, Technology and Industry for National Defense (SASTIND) noted that “lunar exploration is endless.”
Tian said that China is in discussion with the European Space Agency and other countries “to build bases and carry out scientific investigations on the Moon, which will lay a technology and material foundation for human beings’ landing on the Moon in the future.”
For a behind-the-scenes look at getting China’s Chang’e-5 ready for its lunar mission, go to this CCTV-Plus video:
http://cd-pv.news.cctvplus.com/2016/1231/8039831_Preview_1806.mp4

