Archive for the ‘Space News’ Category

The Museum of Contemporary Art on the Moon (MOCAM for short) was conceived in 2016 by visual artist Julio Orta. The concept is seen as a response to the inevitable creation of human communities on the moon in the near future.
According to a MOCAM mission statement:
“Although governments and private entities are working on tourism and colonization of the moon, they seem to have no concern whatsoever for the arts because they are not seen as a source of profit.”

Inaugural show
MOCAM is dedicated in displaying the most interesting, cutting edge, relevant art from the world.
MOCAM is on the watch for emerging artists, new works, and proposals from curators.
An inaugural show, Mystic Hyperstitians in the Heart of Empire, has been curated by Joey Cannizzaro, an undisciplinary artist, curator, and critic. The shows are currently presented on MOCAM’s website.
The intent is that the shows would be on display in the physical museum on the Moon.
Lunar acreage
One small step for art has been taken by Orta last year, procurement of 20 acres on the Moon via LunarLand.com.

Courtesy: Julio Orta
According to a “Moon Deed,” the property is located just South of craters Helicon and Leverrier, in an area identified as D6, Quadrant Charlie, Lot Number 1/0581-0600.
LunarLand.com’s website notes that since 1980, over 300 million acres have been sold.
Museum complex
The Moon-based museum architecture has been designed by Mauricio Mastropiero a Mexican architect.
“The Mountain” will be the first component built, and will host a visitor center, temporary galleries, storage areas, dressing rooms, restrooms, sleeping rooms, a restaurant, and a store.
The Moon structure also consists of the “Central Patio.” It is one the main areas for the exhibition of contemporary art. This outdoor esplanade features 480 poles used as structure for a light architecture that can be configured depending on different exhibition needs. This is a space to experience art under the moon’s natural environment.
At the core of the complex is “The Plateau”, a two-story building that levitates using electromagnetic technology. As the principal gallery, the interior of this building also features a controlled atmosphere and hosts the main exhibitions. The second level of this rotating building is the highest point of the museum, a viewpoint to gaze beyond its physical limits.

Resources
MOCAM is accepting proposals for 2017 shows.
For more information on the Museum of Contemporary Art on the Moon, go to:
For a video detailing the effort, go to:

Curiosity’s Front Hazcam Right B image taken on Sol 1617 February 22, 2017.
Credit: NASA/JPL-Caltech
The NASA Curiosity rover is now departing Sol 1617 activities.
Stuck in the middle on Mars – Curiosity’s right wheel.
That’s the word from Ken Herkenhoff of USGS’s Astrogeology Science Center in Flagstaff, Arizona.
“The drive planned for Sol 1616 halted early, apparently because the right rear wheel got stuck between two rocks,” Herkenhoff reports. “The mobility team concluded that it is safe to continue, so the drive planned for Sol 1617 is essentially the same as the previously-planned drive.”
Layered bedrock
Before the drive, the robot’s Chemistry and Camera (ChemCam) and Right Mastcam were set to observe a sand target named “New Sweden” and Right Mastcam will acquire mosaics of a layered bedrock outcrop dubbed “Hobbstown” and of the dunes that are the target of the drive. measure dust in the atmosphere before the drive begins, Herkenhoff notes.

Curiosity Navcam Left B image acquired on Sol 1617, February 22, 2017.
Credit: NASA/JPL-Caltech
Testing of drill
After the drive and more testing of Curiosity’s drill, along with post-drive imaging to support planning on Wednesday, ChemCam will use special software to autonomously select a target for chemical analysis.

Curiosity Mastcam Right image acquired on Sol 1614, February 19, 2017.
Credit: NASA/JPL-Caltech/MSSS
Meanwhile, a new map of Curiosity’s whereabouts has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1617 Martian day, or sol, of the rover’s mission on Mars (February 22, 2017).
From Sol 1616 to Sol 1617, Curiosity had driven a straight line distance of about 26.59 feet (8.11 meters). Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.71 miles (15.63 kilometers).

The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CALTECH/UNIV. OF ARIZONA

NASA’s Spitzer Space Telescope has revealed the first known system of seven Earth-size planets around a single star.This artist’s concept allows us to imagine what it would be like to stand on the surface of the exoplanet TRAPPIST-1f, located in the TRAPPIST-1 system in the constellation Aquarius.
Credit: NASA/JPL-Caltech
U.S. House Science, Space, and Technology Committee Chairman Lamar Smith (R-Texas) released the following statement today on NASA’s discovery of the first known system of seven Earth-size planets around a single star, three of which are in the habitable zone.
Public imagination
Chairman Smith: “Space discoveries have long captured the public’s imagination, and NASA’s discoveries like the one today continue to inspire us to explore beyond the boundaries of today,” Smith said.
“The discovery of seven Earth-size planets offers information from uncharted territory that will aid in scientific analysis. As these discoveries continue, we aim to put the United States back on top as a first rate space pioneer. My colleagues and I will ensure that NASA has the tools, resources, and guidance necessary to build upon these new developments and chart new courses space exploration for the next generation,” chairman Smith advised.
Bill in transition
The U.S. Senate recently passed the NASA Transition Authorization Act of 2017 which builds upon years of work by the House Science, Space, and Technology Committee.
“I look forward to seeing this bill pass the House quickly and move to the President’s desk for signature to unlock the mysteries of space as President Trump said in his inaugural address,” Smith concluded.

Credit: Tulane University
A novel approach to creating a reusable solar electric space (SEP) “tug” for toting payloads to the Moon, Mars or elsewhere is dubbed “Sunflower” – a Modular, Hexagonally Symmetric, SEP Cargo Transport Spacecraft.
Sunflower was the winner in NASA’s 2017 BIG Idea Challenge, a concept forged by students from Tulane University.

Credit: NASA
The Sunflower’s structure, power, and navigation systems are distributed across a large surface composed of 12 identical and connected modules. Each module contains an independent set of solar panels, fuel, propulsion, and navigation systems.
To form a 200 kilowatt array, the required surface area of solar panels is roughly 800 meters.
Docking techniques
The modules of the Sunflower are launched in two separate launch vehicles and aggregate in low Earth orbit within 60 days.
Sunflower modules are connected via reversible electro-permanent magnet joints, and a secondary mechanical locking mechanism. This docking technique eliminates the need for a secondary robotic assembly entirely.

Big Idea 2017 winning team from Tulane University are shown holding a model of their winning design.
Top row from left to right are: Professor Timothy Schuler, Otto Lyon and Matthew Gorban.
On the bottom row are Afsheen Sajjadi, Ethan Gasta, John Robertson and Maxwell Woody.
Credit: NASA/Harlen Capen
The power, mass, and thrust of the tug is proportional to the number of modules connected. Additional modules can be added to the Sunflower to achieve more power. Unwanted modules can be jettisoned from the Sunflower and replaced by new modules, allowing for operational refurbishment.
NASA’s Idea Challenge is a university-level design competition sponsored by NASA’s Space Technology Mission Directorate, managed by the National Institute of Aerospace (NIA), and hosted by NASA’s Langley Research Center in Hampton, Virginia.

UK Spaceports.
Credit: UK Space AgencyLaunch UK
The United Kingdom has put in motion a draft Spaceflight Bill, promoting the construction and operation of spaceports across the UK for the first time, as well as giving the go for spacecraft to be rocketed spaceward from British soil.
Tariq Ahmad, aviation minister, said: “We have never launched a spaceflight before from this country. Our ambition is to allow for safe and competitive access to space from the UK, so we remain at the forefront of a new commercial space age.” The UK’s space sector is the future of the British economy, he added.
Safe and cost-effective access to space
The bill has been presented to Parliament by the Secretary of State for Transport by Command of Her Majesty.

“This draft spaceflight legislation will be fundamental to enabling safe and cost-effective access to space from the UK so creating high-value jobs and economic benefits across the country. It is important we get this complex new legislation right to create a safe, competitive and sustainable commercial spaceflight market,” notes the foreword to the bill.
To review the draft UK bill, go to:

Mars attacks…this time in a new movie called Life.
To be released in the U.S. on March 24, the going-in theme as advertised for Life is that an international space crew discovers life on Mars.
That’s the good news.
But the delivery package of samples to their spacecraft from the Red Planet has an edgy side.

As one poster for the movie notes: “Be careful what you search for.”
This horror, sci-fi thriller features actors Rebecca Ferguson, Jake Gyllenhaal, and Ryan Reynolds. The film is directed by Daniel Espinosa known for Safe House (2012), Child 44 (2015) and Easy Money (2010).
Unintended consequences
At quick glance, the film appears part Andromeda Strain and Alien – but the outcome is TBD.

According to early details from Sony pictures, Life tells the story of the six-member crew of the International Space Station that is on the cutting edge of one of the most important discoveries in human history: the first evidence of extraterrestrial life on Mars.
As the crew begins to conduct research, their methods end up having unintended consequences and the life form turns out to be more intelligent than anyone ever expected.
The production company for Life is Skydance and will be distributed by Columbia Pictures.
To view a Life movie trailer, go to:
https://www.youtube.com/watch?v=_yzBSOQHjqY

The United Arab Emirates has the Red Planet in its sights, not only moving forward on a Mars orbiter but also establishing the first inhabitable human settlement on the planet by 2117.
Space visionary, His Highness Sheikh Mohammed bin Rashid Al Maktoum, is Vice President, Prime Minister and Ruler of Dubai. He recently unveiled, along with Deputy Supreme Commander of the UAE Armed Forces, His Highness Sheikh Mohamed bin Zayed Al Nahyan, the “Mars 2117 Project” during the 5th World Government Summit, held February 12 to 14 in Dubai.

Mars on his mind – His Highness Sheikh Mohammed bin Rashid Al Maktoum.
Credit: Government of Dubai Media Office
“The landing of people on other planets has been a longtime dream for humans. Our aim is that the UAE will spearhead international efforts to make this dream a reality,” Sheikh Mohammed bin Rashid Al Maktoum said.
First phase
According to the Government of Dubai Media Office website, the first phase of the project will focus on preparing the human cadres able to achieve scientific breakthrough to facilitate the arrival of human to the Red Planet in the next decades.
The Mars 2117 Project also aims to prepare an Emiratis scientists team and to develop an international scientific consortium to speed up the research project, the website explains. “The project will start with an Emiratis scientific team and will be extended to include international scientists and researchers, in addition to streamline the human efforts in term of exploring and settlement of the red planet.”
Lifestyle on Mars
The initiative also focuses on developing faster means of transportation to and from the Red Planet, along with integrating the scientific visualization the settlement itself, and how life will be sustained there in terms of such items as food, transportation and energy supplies.

Hope Mars orbiter.
Credit: UAE Space Agency
Earlier, the website adds, an Emirati team of engineers, along with a group of scientists and researchers, have sketched out the first human city on Mars, one that would be built by robots. The plan showcased during the recently held summit highlighted the expected lifestyle on Mars in terms of transport, power production and providing food, as well as materials used for the construction of the city.
Hope orbiter
Meanwhile, UAE engineers are at work on building the “Hope” Mars orbiter. It is the Arab world’s and Muslim nation’s first spacecraft to the Red Planet in a scientific exploration mission to be lofted in 2020 via Japan’s H-2A booster.

Credit: UAE Space Agency
Hope would arrive at Mars in 2021 to coincide with the 50th anniversary of the founding of the UAE. The orbiter’s science task is to search for connections between current weather and the planet’s ancient climate.
Orbital operations of the craft are to start mid-2021. Its primary science operations duration is two years, with a potential extended mission of two further years.
At the recent two-day Global Space Congress in Abu Dhabi, capital of the UAE, Hope is on track and on time, said Mohammed Al Ahbabi, director general of UAE Space Agency.
Go to this CCTV-Plus interview recorded during the UAE Global Space Congress:
http://cd-pv.news.cctvplus.com/2017/0202/8042153_Preview_8462.mp4

There are indications of U.S. President Donald Trump shaping his space policy agenda.
Among those agenda items:
— His policies will be aimed at human exploration of the solar system.
— His policies will make NASA’s prime mission to reach beyond low earth orbit.
— He will turn over non-military and intelligence activities in low earth orbit (LEO) exclusively to the commercial sector.
— He intends to use private-public partnerships to expand the resources available to do space exploration and create space investment.
Taking the beachhead

ROBERT S. WALKER
FORMER CHAIRMAN, SCIENCE, SPACE AND TECHNOLOGY COMMITTEE, U.S. HOUSE OF REPRESENTATIVES
That’s the view of Robert S. Walker, former Chairman of the Science, Space and Technology Committee, U.S. House of Representatives.
Walker was a Senior Space Policy Advisor to the presidential campaign of Donald J. Trump, served as an outside advisor to the Trump transition team, and currently provides outside advice to the administration’s beachhead teams working on civil, commercial, and space policy.
Walker expressed his space thoughts on The Cipher Brief, a digital, security-based conversation platform that connects the private sector with the world’s leading security experts.
For Walker’s space posting brief, go to:
Unlocking the Mysteries of Space—Trump Space Policy
https://www.thecipherbrief.com/article/unlocking-mysteries-space-trump-space-policy-1095
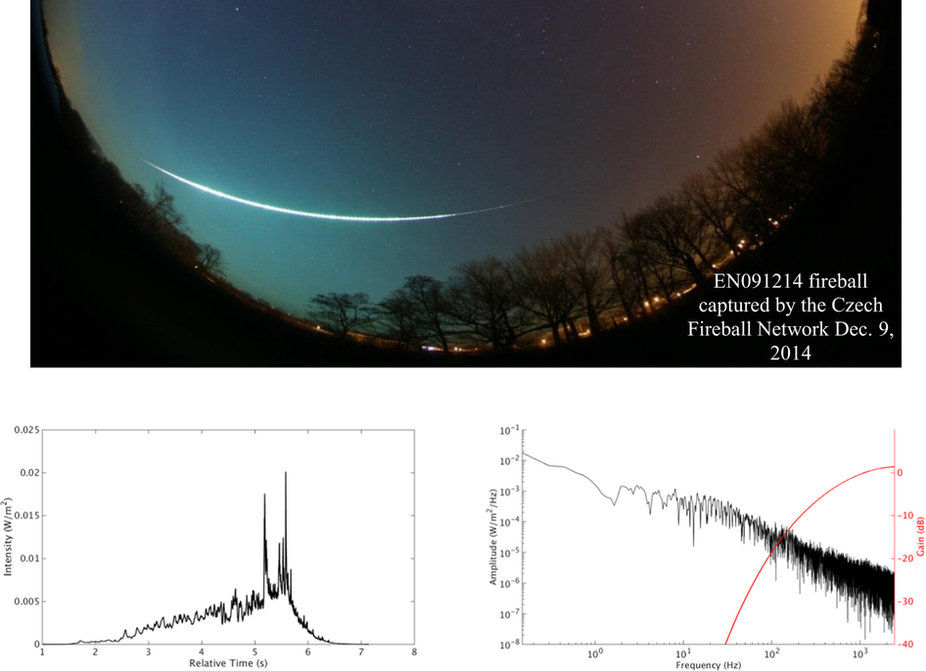
Open-shutter photograph of fireball EN09121418 taken by Pavel Spurný at the Czech Fireball Network along with related data regarding sound emitted from fireballs.
Credit: Spalding, R. et al.
Meteors emitting sizzling, rustling and hissing sounds as they descend seem contrary to the laws of physics.
What’s up with this observation?
Because sound travels far slower than light, the sounds should arrive several minutes after the meteor hits, rather than accompany or even precede it. These sounds cannot be attributed to direct acoustic propagation from the upper atmosphere for which travel time would be several minutes.
New idea

The late Sandia National Laboratories researcher and pioneer Richard Spalding, father of Meteor Allsky Networks.
Credit: Randy Montoya/Sandia National Laboratories
In an article published Feb. 1 in the journal Scientific Reports titled “Photoacoustic Sounds from Meteors,” the late Sandia National Laboratories researcher Richard Spalding and fellow researchers offered up a new idea.
Spalding and his colleagues reasoned that such intense light could suddenly heat the surface of objects many miles away, which in turn heats the surrounding air. This could create sounds near the observer.
Some new experimentally work has demonstrated and analyzed that effect.
Dark cloths and a wig
The investigative researchers found that objects with low conductivity, such as leaves, grass, dark paint and even hair, could rapidly warm and transmit heat into nearby air and generate pressure waves by subtle oscillations that create a variety of sounds.
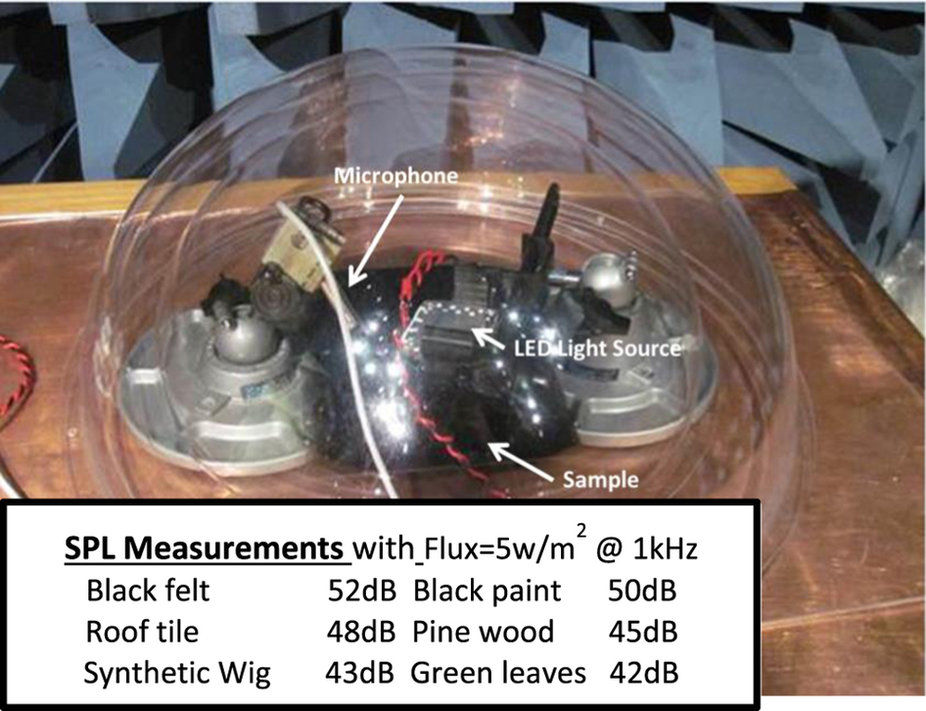
The experimenters exposed several materials, including dark cloths and a wig, to intense pulsing light akin to that produced by a fireball. The process produced faint sounds similar to rustling leaves or faint whispers. Computer models bear out the results.
The process is called photoacoustic coupling.
Acoustic waves
According to a Sandia news release, sounds concurrent with a meteor’s arrival “must be associated with some form of electromagnetic energy generated by the meteor, propagated to the vicinity of the observer and transduced into acoustic waves,” according to the article in Scientific Reports. “A succession of light-pulse-produced pressure waves can then manifest as sound to a nearby observer.”
A less extreme version of the photoacoustic effect had been observed in 1880 by Alexander Graham Bell.
At that time, Bell tested the possibilities of light for long-distance phone transmissions and he intermittently interrupted sunlight shining on a variety of materials and noted the sounds produced.
Resources
Along with Spalding, the other scientists engaged in the research:
Sandia National Laboratories, Albuquerque, New Mexico – John Tencer, William Sweatt, Benjamin Conley, Roy Hogan, Mark Boslough & GiGi Gonzales
Astronomical Institute, Czech Academy of Sciences, Ondřejov, Czech Republic – Pavel Spurný
To read the full paper, “Photoacoustic Sounds from Meteors” go to:

Rocket Lab’s Electron booster will soon take to the air.
Credit: Rocket Lab
The first orbital launch attempt from New Zealand is near at hand.
Rocket Lab has transported its Electron booster to a launch site in the Mahia Peninsula from the company’s Auckland facility.

Launch site in the Mahia Peninsula.
Credit: Rocket Lab
Rocket Lab’s mission is to make space accessible by offering small satellite customers a rapid-response orbital service that is frequent, reliable and affordable.
The Electron booster is now undergoing pre-flight testing. A trio of test flights is on tap prior to offering the launcher to customers.
Google Lunar X Prize competitor, Moon Express, is contracted with Rocket Lab USA. Their lunar mission is scheduled to take place in 2017 using the MX-1E lunar lander on Rocket Lab’s Electron rocket.

Rocket Lab’s New Zealand launch site.
Credit: Rocket Lab
High flight rate
According to a payload user’s guide provided to Inside Outer Space, the Electron is a two-stage vehicle intended to serve the emerging small satellite market and has been “designed with a high flight rate in mind.”
Electron is optimized, according to the company, for quickly launching constellations of small satellites.
The booster is configured to hurl 150 kg (330lbs) to a nominal 500 km sun-synchronous orbit from the private company’s Rocket Lab Launch Complex in New Zealand as well as from U.S. domestic range.
The standard launch of Electron starts at $4.9 million (2016) per launch. The vehicle is marketed as providing at least 100 flights per year.
New Zealand Space Agency
The Rocket Lab Launch Complex 1 was officially opened in late September of 2016.

Mason Bay dunes.
Credit: New Zealand Space Agency
The New Zealand Government has announced the development of a new regulatory regime for space and high altitude activities. A New Zealand Space Agency was formed in 2016 within the country’s Ministry of Business, Innovation and Employment (MBIE) and is encouraging New Zealand’s participation in the global space economy.
As noted by the MBIE, a key player is Rocket Lab, cited as a commercial space launch operator using innovative and disruptive technology developed in New Zealand and employing highly skilled people in New Zealand.
For a look at Rocket Lab’s preparations, go to this video:
https://www.youtube.com/watch?v=ZFnTpURe7UI
Also, go to the Rocket Lab website at:
For Rocket Lab’s Frequently Asked Questions, go to:
http://www.rocketlabusa.com/frequently-asked-questions/

