Archive for the ‘Space News’ Category
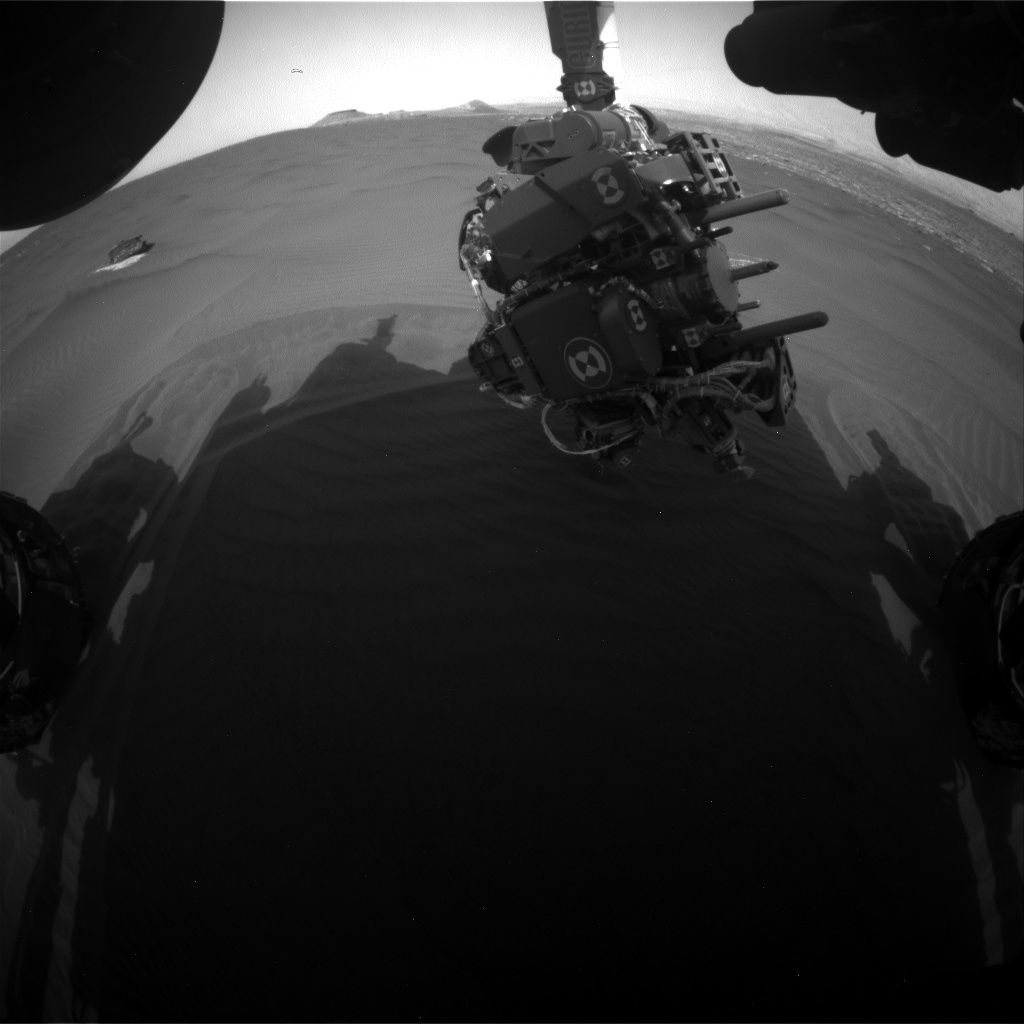
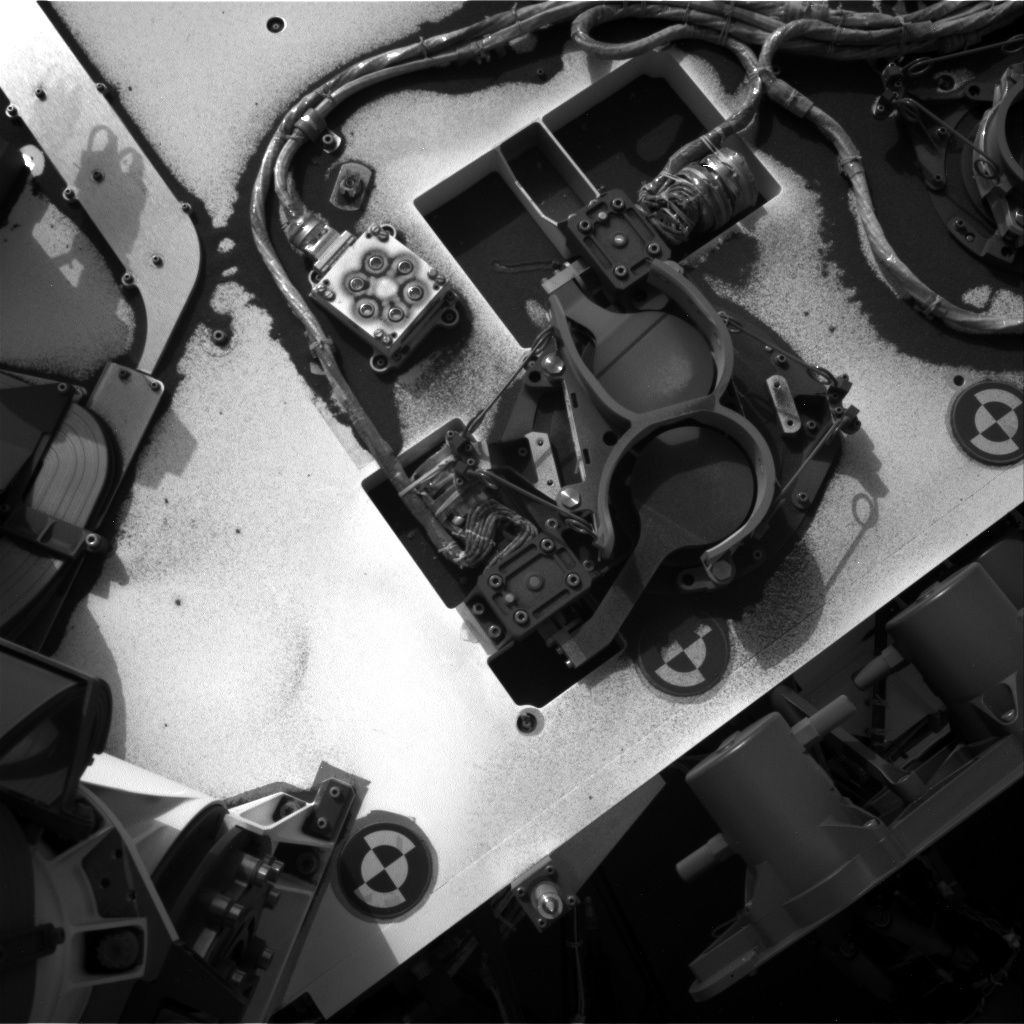
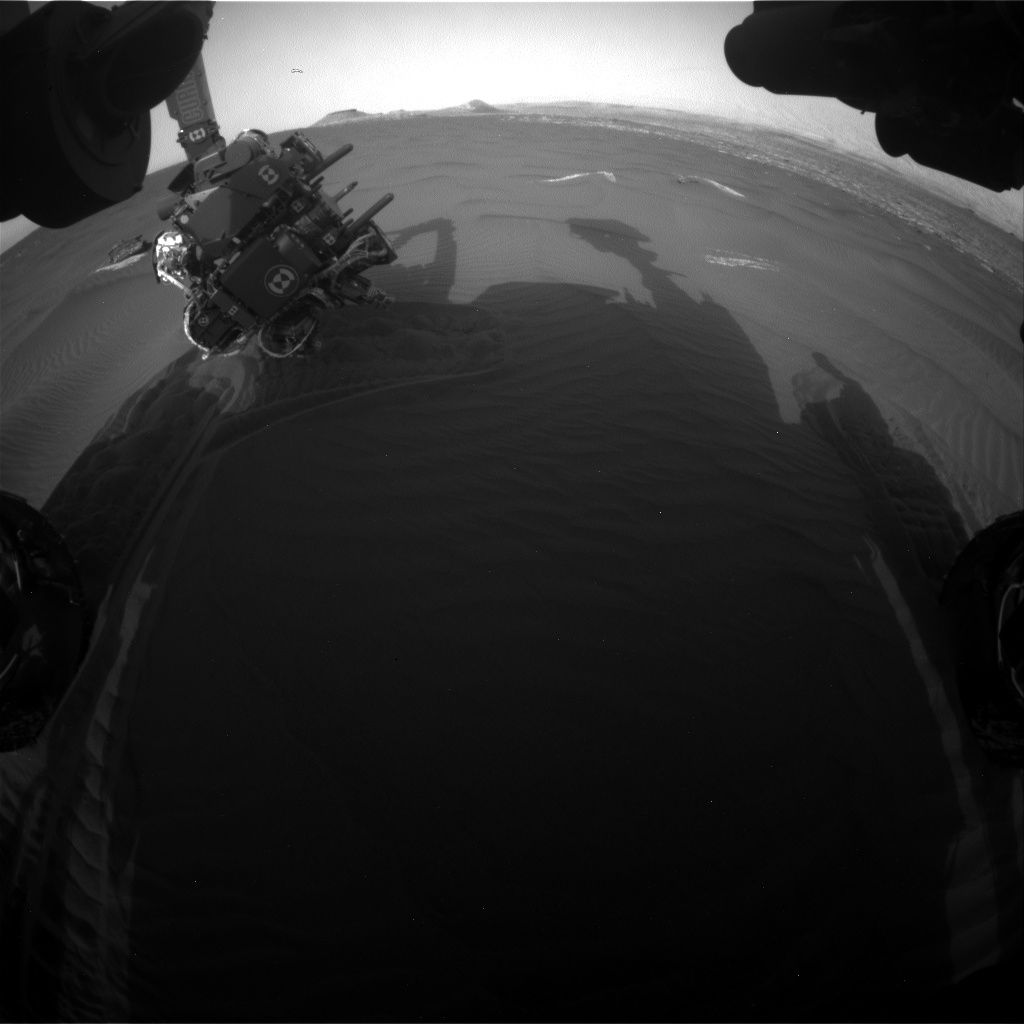
Curiosity Front Hazcam Right B on Sol 1657 April 4, 2017.
Credit: NASA/JPL-Caltech
Now in Sol 1658 on Mars, the Curiosity rover has been busy in a remote sensing science campaign.
Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona, reports that over the last weekend there was a problem with the Deep Space Network.
The DSN transmits commands to Curiosity, “so the rover didn’t receive its instructions and instead went into “runout” mode, Anderson notes. In that mode, the robot patiently waits for commands and does some basic environmental monitoring in the meantime.
“Do-over”
That means Curiosity controllers went into a “do-over” mode themselves, trying to cram everything from our weekend plan into two sols.
The Sol 1657 plan was to begin with a busy remote sensing science block.
Curiosity’s Navcam will take a couple of images of the workspace. Then the rover’s Mastcam will do a large multispectral mosaic of Vera Rubin Ridge and its interesting iron oxides.
This is then followed by a multispectral observation of the target “Fivemile Brook” and an image to monitor the rover deck, Anderson adds. Mastcam also has the first of several change monitoring observations in the science block. “These observations are repeated throughout the day to see if any sand moves, he says.
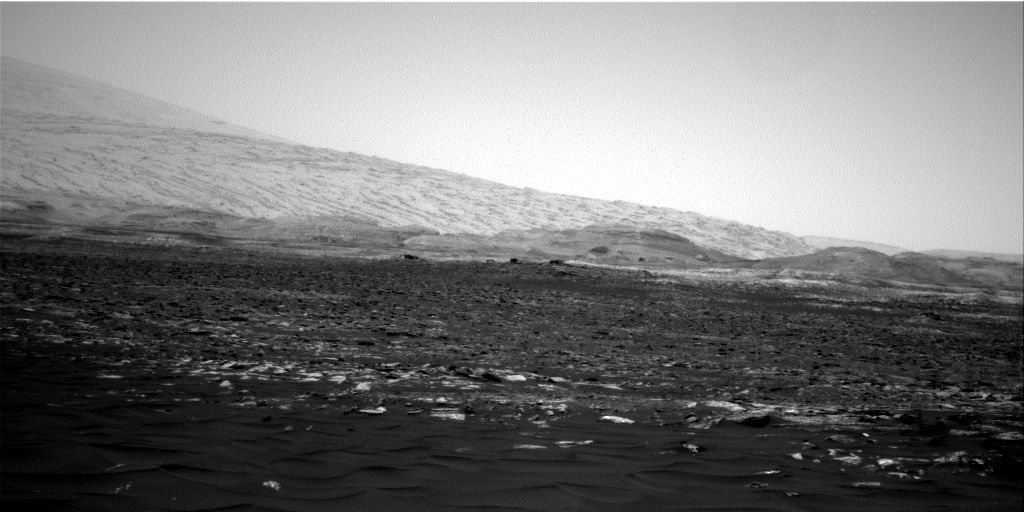
Curiosity Mastcam Right image taken on Sol 1653, March 31, 2017.
Credit: NASA/JPL-Caltech/MSSS
Long-distance observation
Once Mastcam is done, Chemistry & Camera (ChemCam) has a couple of passive calibration activities, followed by a long-distance observation of Mt. Sharp.
Later in the Sol 1657 plan, the robot’s Mars Hand Lens Imager (MAHLI) is slated to take documentation images of the scoop location at Ogunquit, and the Mars Descent Imager (MARDI) has a twilight observation of the ground under the rover’s wheels.
The Sample Analysis at Mars (SAM) Instrument Suite is also to have an engineering activity.
Change detection
On Sol 1658, the plan is to start off with morning atmospheric observations using Navcam and Mastcam, as well as the start of another set of Mastcam change detection images.
The main targeted science block on Sol 1658 has ChemCam observations of the targets “Kamankeag” and “Hamlik Peak” with accompanying Mastcam images. Navcam also has a dust devil movie and a cloud movie in this science block.
A little bit later in the afternoon, Mastcam will repeat its change detection image and do another couple of observations to measure the dust in the atmosphere.
The change detection images will continue on into the evening, and MARDI will also take another image to see what has changed beneath the rover, Anderson concludes.

Credit: CP Curtis Press
Book Review: No Bucks, No Buck Rogers: Creating the Business of Commercial Space by Derek Webber, CP Curtis Press; 2017; U.S. $42.95.
This is an engaging, well-written, and fact-filled book regarding commercial space exploration.
Webber has long been associated with giving space the business, and his insider looks at how best to build the economic case for space is documented in this volume.
This over 270-page book is divided into sections:
Military and Governmental Beginnings; Traditional Commercial Space Businesses; Transition-enabling Businesses; Commercial Space Exploration Businesses; and Creating the Business of Commercial Space.
You can tell by these section listings, this is a no-nonsense look into space engineering, marketing and finance along with other business aspects. The volume also serves up fascinating projections into the future – specifically, lunar commerce, asteroid mining, space solar power, as well as space settlement.

Author Derek Webber
The author provides the reader unique insights, including accounts and details of multi-million dollar satellite and launch vehicle negotiations.
As Webber explains, the intent of this personal look is to detail and document “a massive paradigm shift” from old space to new space. The author has pulled together, not only an impressive roster of past, present, and future enterprises, but also the cast of characters that have been, in my view, renaissance agents – those individuals that have helped shape commercial space.
I was particularly drawn to the more futuristic opportunities. There’s a very healthy dose of detail concerning space tourism – which often takes on the ambience of tapping fusion power. But as Webber notes, “without true re-usability, enabled by space tourism, none of the future economic developments would be possible.”
The book also includes valuable general reading citations and key data sources, along with a selection of illustrations and photos, many published for the first time.
In his career, Derek Webber has been engaged in many of the significant developments of commercial space. As the Director of Spaceport Associates, he developed key space tourism market research data, and is currently presiding over the “Gateway Earth” space policy initiative.
For more information on this highly-informative book, go to:

Credit: Lockheed Martin
An orbital Mars Base Camp could be circling the Red Planet in 2028, a facility housing researchers to unlock key questions about that complex planet as prelude to a human expedition setting foot on the far-away world.
Joystick exploration
Circling Mars in a highly elliptical orbit, the six-person Mars Base Camp would make use of virtual reality, immersive technology, and artificial intelligence to joystick advanced rovers and other craft on the planet in real-time.

Credit: Lockheed Martin
Thanks to continuous, high-data rate communications, the Mars Base Camp is designed to vastly amplify the collection of imagery and scientific facts gleaned from multiple sites on the planet – data amassed over a full year of real-time exploration.
For more information on this innovative approach to human exploration of Mars, go to my new Space.com story at:
‘Mars Base Camp’: Lockheed Fleshes Out Red Planet Space Station Plan
By Leonard David, Space.com’s Space Insider Columnist
April 3, 2017 08:00am ET
http://www.space.com/36312-mars-base-camp-astronauts-2028.html
Curiosity Front Hazcam Left B image taken on Sol 1653, March 31, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on Mars is now performing science duties during Sol 1654.
A three-sol plan has been scripted that involves the Mars Hand Lens Imager (MAHLI) photo shoot of the first scoop location (OG1). The fine-grained portion of “Ogunquit Beach” Scoop #1 (now named “OG1”).
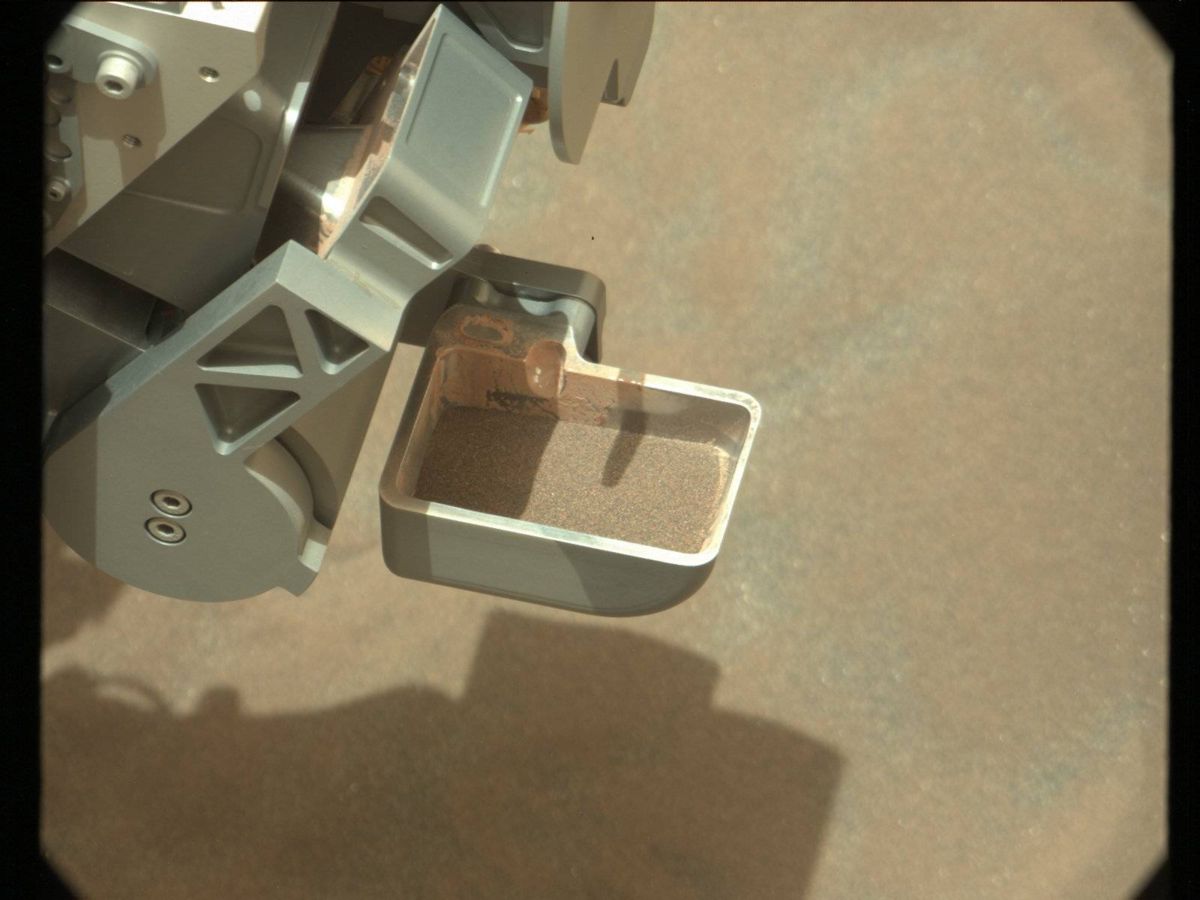
Here’s the scoop! Curiosity Mastcam Right image taken on Sol 1651, March 29, 2017.
Credit: NASA/JPL-Caltech/MSSS
Imaging suites
First sol work calls for use of Mastcam and Mars Descent Imager (MARDI) imaging for change detection. The second sol involves a number of remote sensing activities, starting with a long morning imaging suite for environmental monitoring observations, reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona and Michael Battalio, a Ph.D. candidate in atmospheric science at Texas A&M.
Sand laden topside of Curiosity rover. Navcam Right B image taken on Sol 1653, March 31, 2017.
Credit: NASA/JPL-Caltech
“The imaging suites are special observations that include Navcam cloud movies and dust opacity measurements from both Navcam and Mastcam at an early morning time, when the rover is usually asleep and recharging,” they report.
Mosaic of Vera Rubin Ridge
On the schedule, the sol 1655 imaging suite is a long version that also includes a Chemistry & Camera (ChemCam) passive sky measurement, which seeks to determine the chemical composition of the air near Curiosity.
Curiosity Navcam Right B image taken on Sol 1653, March 31, 2017.
Credit: NASA/JPL-Caltech
All of these measurements are duplicated in the afternoon to check for diurnal variability. Later in the afternoon, the script calls for taking a large Mastcam mosaic of “Vera Rubin Ridge,” for both stereo and multispectral analysis of the prominent ridge at the base of Mt. Sharp.
“We’ll also acquire a multispectral Mastcam image of the area observed by the Ground Temperature Sensor (GTS) to help with thermal modeling and grain size determination,” Edgar and Battalio report. The plan also includes the usual Rover Environmental Monitoring Station (REMS) and Dynamic Albedo of Neutrons measurements.
Additional REMS observations have been added to the plan to determine if the REMS GTS is affected by an increase in winds in the afternoon.
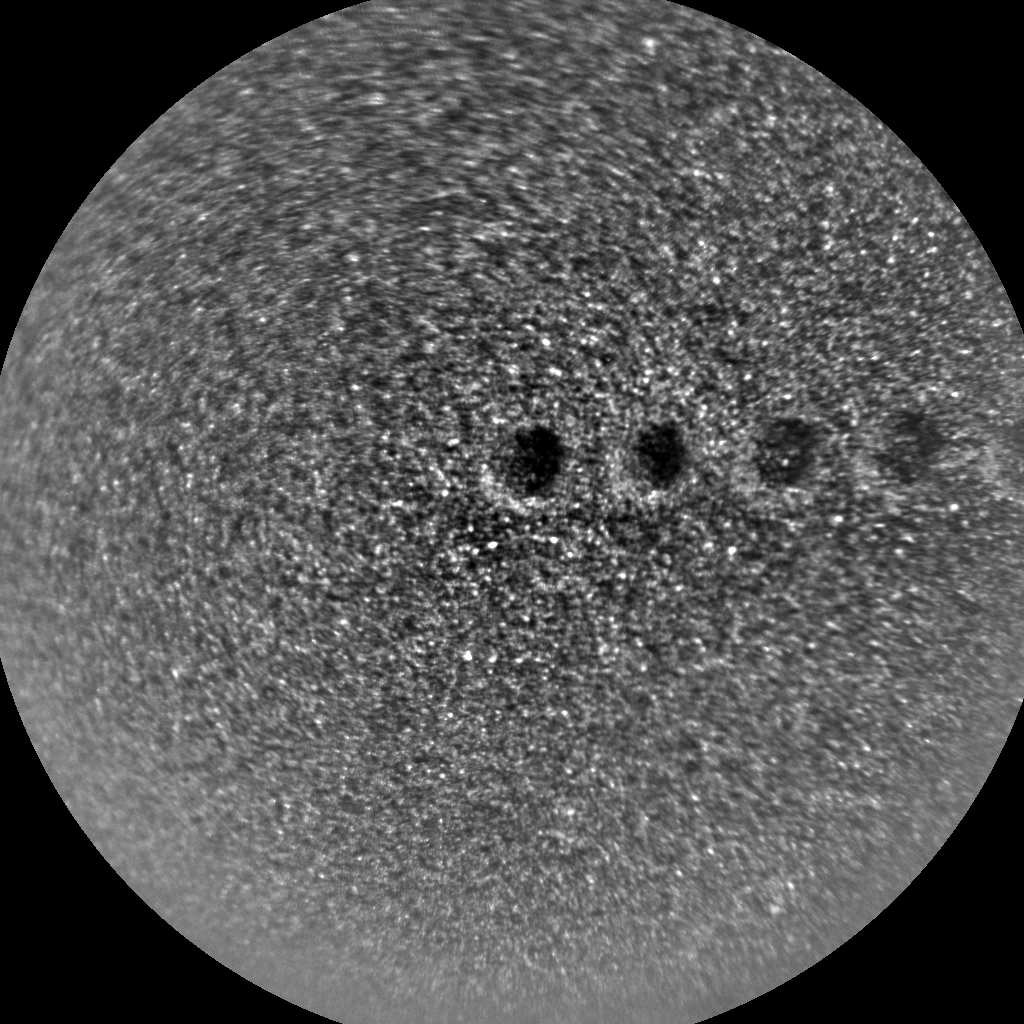
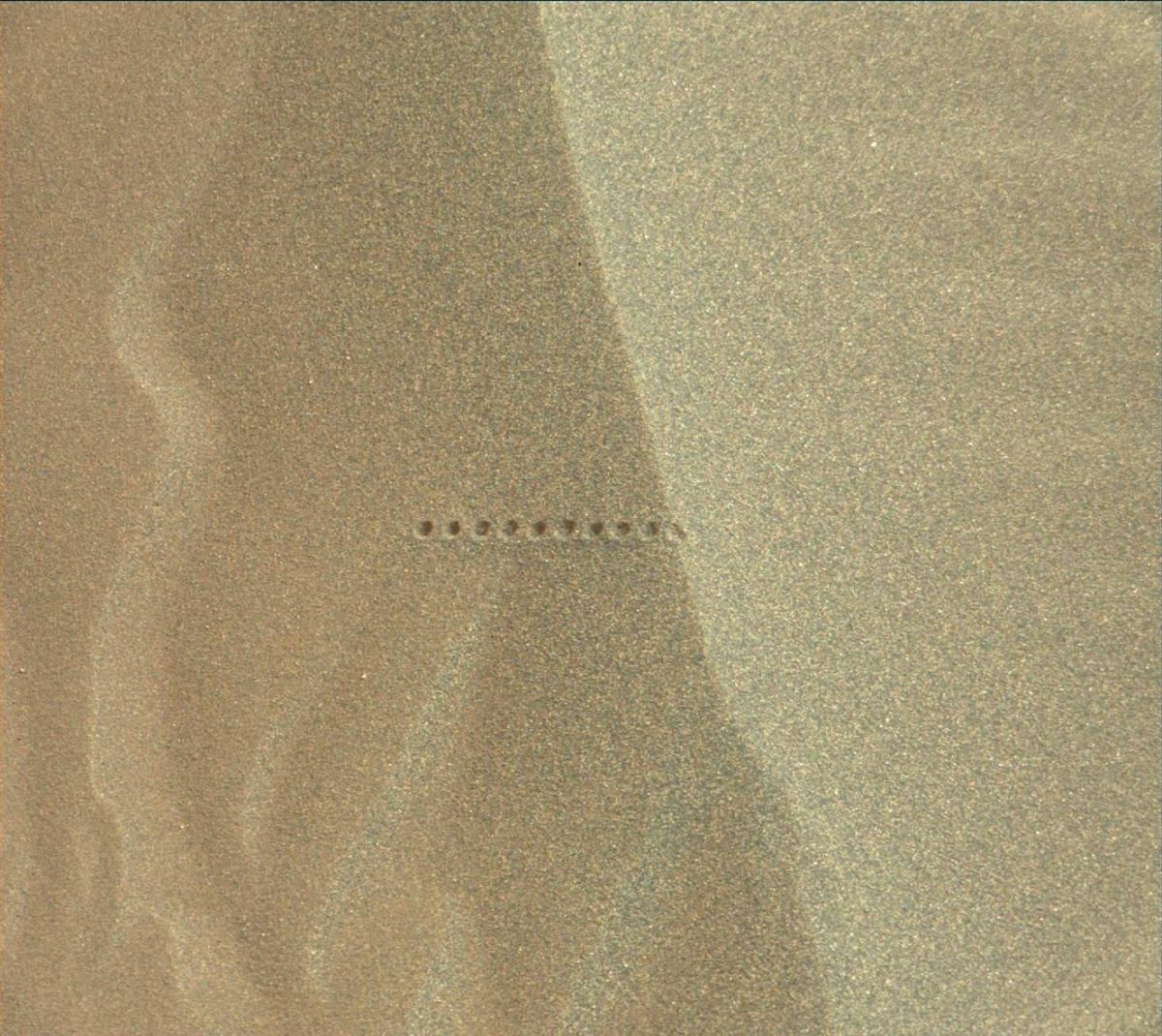
Laser pulses in Mars sand. Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1653 March 31, 2017.
Credit: NASA/JPL-Caltech/LANL
Dust devil movie
The second sol also includes more Mastcam change detection observations, and a large Navcam 15-frame dust devil movie to attempt to capture movement in individual dust devils and to estimate the amount of dust lifted by a range of vortex sizes.
Edgar and Battalio report that on the third sol, ChemCam will perform some calibration activities and analyze targets “Kamankeag” and “Hamlin Peak” to assess the composition of Murray bedrock and a small ripple.
Next week, look for more dune campaign activities.

Wang Xiaojun, commander-in-chief of Long March-7.
Credit: CCTV-Plus
Chinese space engineers are busily readying the country’s Tianzhou-1 – a resupply spacecraft.
A Long March-7 Y2 carrier rocket will boost the cargo vehicle into space next month, blasting off from China’s Wenchang Launch Center, Hainan Province.

China’s cargo ship will dock with the now-orbiting Tiangong-2 space lab and refuel that facility.
Credit: CMSE
The launch of Tianzhou-1 faces challenges as the rocket’s launch window has to be accurate to a second, explains Wang Xiaojun, commander-in-chief of Long March-7.
“Rockets are composed of a complex system. And the operational procedure before the launch is also very complex. If there is a problem in any step in the process, it will be difficult for us to guarantee the zero window launch,” Wang told CCTV in a video interview.
Zero launch window
The cargo spacecraft will dock with the already orbiting, but unoccupied, Tiangong-2 space lab, and that requires a precise launch window accurate to a second, hence the name “zero launch window.”

Tianzhou-1 supply ship.
Credit: CCTV-Plus
There’s another launch issue. That is, the rainy weather in south China’s Hainan Province that can impact the launch time.
Wang underscores the fact that rocket designers have made the rocket waterproof – reportedly China’s first carrier rocket capable of being launched in rain.
Space lab link-ups
If successfully launched, the Tianzhou-1 is expected to dock with the Tiangong-2 space lab three times to evaluate rendezvous, docking, and refueling techniques.
The rocket will be launched in April “when the time is right,” said Che Zhuming, a senior engineer at the launch center in a previous CCTV interview.
Meanwhile, China’s space monitoring and control vessel team has also entered a key phase of its preparation, at the ready for the upcoming Tianzhou-1 liftoff.
Future plans
Tiangong-2 (Heavenly Palace-2) was lobbed into space in mid-September 2016. A two-person Shenzhou 11 successfully docked with Tiangong-2 in October 2016. Veteran space flyer, Jing Haipeng commanded the mission, with first-time space flyer, Chen Dong, forming the inaugural crew for the space laboratory.
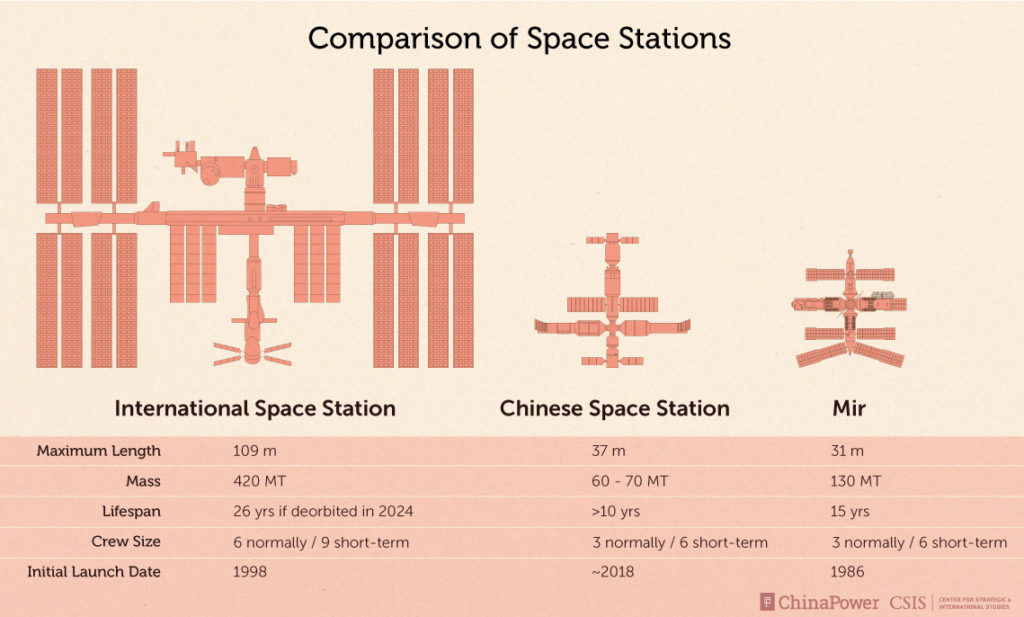
Credit: CSIS
The crew landed successfully after their 33-day space mission on November 18, 2016.
China’s Tianzhou-1 cargo vessel is a key element of the country’s future plans to construct a multi-module space station in the 2020s.
For a recent CCTV-Plus video on Tianzhou-1 launch preparations, go to:
http://cd-pv.news.cctvplus.com/2017/0311/8045131_Preview_8198.mp4

Artist rendering of Lockheed Martin-built Orion spacecraft in deep space.
Credit: Lockheed Martin
To get a leg up on leaving low Earth orbit, dispatching humans back to the Moon…or full throttle and go for the gusto by sending crews to Mars…or?

Private firm foothold on Mars? SpaceX Red Dragon makes use of Supersonic Retro-Propulsion (SRP) to land on Mars.
Credit: SpaceX
If you’re seeking advice look no further than the recent 48th Lunar and Planetary Science Conference (LPSC), held March 21-25. Scientists unleashed the latest findings regarding Earth’s Moon, Mars, asteroids, comets and a myriad of other objects of interest. Whereas robotic space exploration is the persistent currency of discovery, seeing humans return as beyond Earth exploration agents is viewed positively.
For more details, go to my new Scientific American story at:
Red Planet versus Dead Planet: Scientists Debate Next Destination for Astronauts in Space

Credit: Clouds AO
Yes, it’s filed under speculative, space, architecture.
But the New York-based Clouds Architecture Office (Clouds AO) has released details of “Analemma” and a system referred to as the Universal Orbital Support System (UOSS).

Credit: Clouds AO
This same group worked with NASA recently to create a Mars Ice Home.
Overall, the group’s new concept trump’s Trump Tower!
Super tall tower
In the group’s new idea, by placing a large asteroid into orbit over Earth, a high strength cable can be lowered towards the surface of earth from which a super tall tower can be suspended. Since this new tower typology is suspended in the air, it can be constructed anywhere in the world and transported to its final location.

Credit: Clouds AO
Clouds AO’s proposal calls for Analemma to be constructed over Dubai, which has proven to be a specialist in tall building construction at one fifth the cost of New York City construction.
The bottom line is that the concept inverts the traditional diagram of an Earth-based foundation, instead depending on a space-based supporting foundation from which the tower is suspended.
Figure-8 form
Orbital mechanics for Analemma: geosynchronous orbit matches Earth’s sidereal rotation period of one day. The tower’s position in the sky traces out a path in a figure-8 form, returning the tower to exactly the same position in the sky each day.

Credit: Clouds AO
Clouds AO explains that manipulating asteroids is no longer relegated to science fiction.
“Analemma can be placed in an eccentric geosynchronous orbit which would allow it to travel between the northern and southern hemispheres on a daily loop. The ground trace for this pendulum tower would be a figure eight, where the tower would move at its slowest speed at the top and bottom of the figure eight allowing the possibility for the towers occupants to interface with the planet’s surface at these points. The proposed orbit is calibrated so the slowest part of the towers trajectory occurs over New York City.

Credit: Clouds AO
Electromagnetic elevators
As detailed by Clouds AO, “Analemma would get its power from space-based solar panels. Installed above the dense and diffuse atmosphere, these panels would have constant exposure to sunlight, with a greater efficiency than conventional PV installations. Water would be filtered and recycled in a semi-closed loop system, replenished with condensate captured from clouds and rainwater. Developments in cable-less electromagnetic elevators have effectively shattered height restrictions imposed by elevator cable spool volume.”

Credit: Clouds AO
Height limit?
While researching atmospheric conditions for this project, Clouds AO experts realized that there is probably a tangible height limit beyond which people would not tolerate living due to the extreme conditions. For example, while there may be a benefit to having 45 extra minutes of daylight at an elevation of 32,000 meters, the near vacuum and -40C temperature would prevent people from going outside without a protective suit.
“Then again,” the Clouds AO website explains, “astronauts have continually occupied the space station for decades, so perhaps it’s not so bad?”

Credit: Clouds AO
High cost of construction
Analemma Tower is a proposal for the world’s tallest building ever.
“Harnessing the power of planetary design thinking, it taps into the desire for extreme height, seclusion and constant mobility. If the recent boom in residential towers proves that sales price per square foot rises with floor elevation, then Analemma Tower will command record prices, justifying its high cost of construction,” the Clouds AO website explains.
For more information on this innovative group, go to:
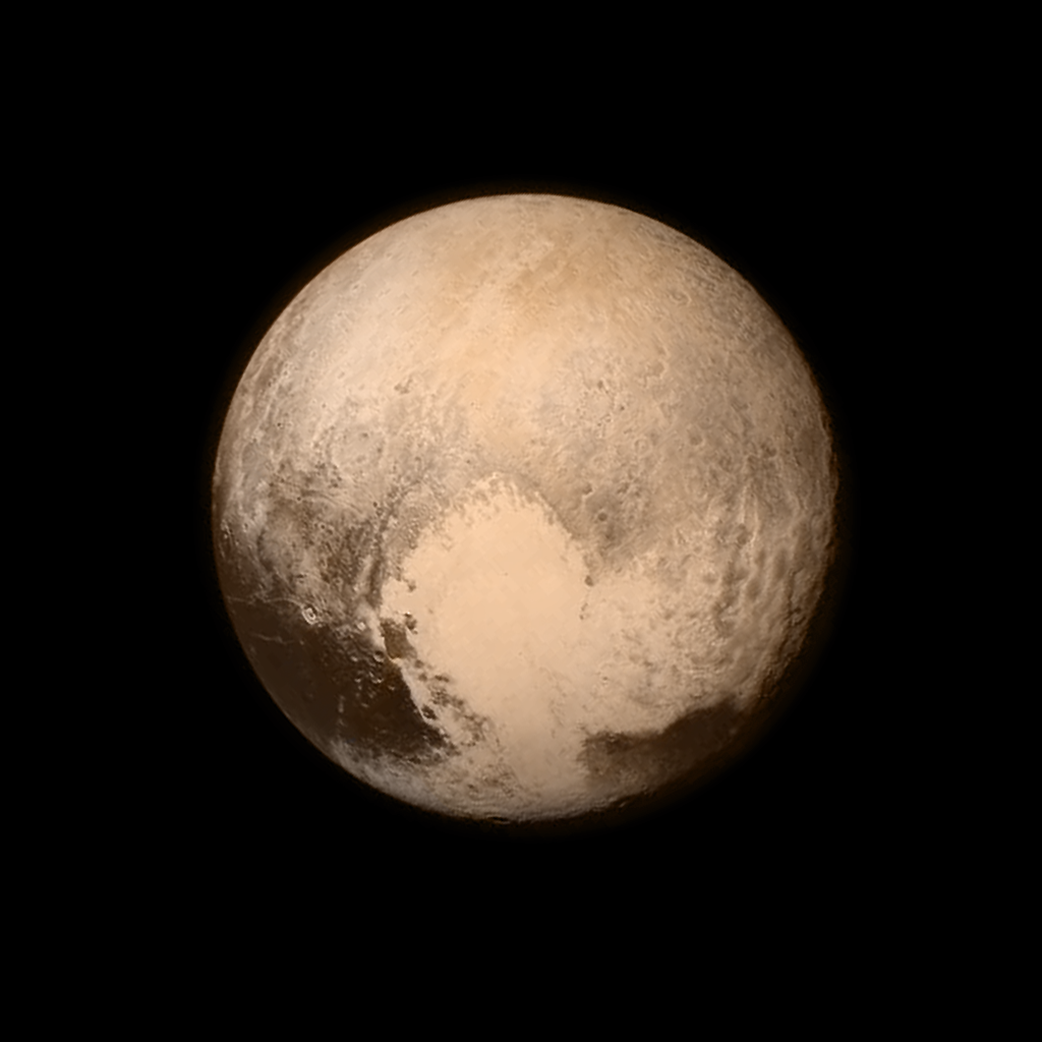
Pluto nearly fills the frame in this image from the New Horizon’s Long Range Reconnaissance Imager (LORRI).
Credit: NASA/APL/SwRI
After more than a decade of controversy, the debate over the icy world’s demotion to “dwarf planet” status shows no sign of stopping.
The upshot from the vote to downgrade Pluto as a planet to a dwarf planet in 2006 by the International Astronomical Union (IAU) continues to swirl around a major axis of dispute.
Turns out, it’s a world also caught in a vortex of nomenclature, planetary pedagogy, as well as a slight nudge from ambivalence.

Leonard David (left) at last week’s 48th Lunar and Planetary Science Conference in The Woodlands, Texas, interviewing Kirby Runyon about his Pluto as a planet campaign.
Courtesy: Kirby Runyon
New Horizons
There is no question that the July 14, 2015 flyby of Pluto by NASA’s New Horizons spacecraft – the first probe to do so – has sparked more debate about the famous object’s Solar System standing. That far flung craft revealed surprising, eye-opening detail about Pluto and its entourage of moons.
Back into the “planetary ‘hood?
But while plugging back Pluto into the “planetary ‘hood” is being advanced, it’s arguably a tough call.
For more on the debate, discussion, controversy, take a look at my new story for Scientific American at:

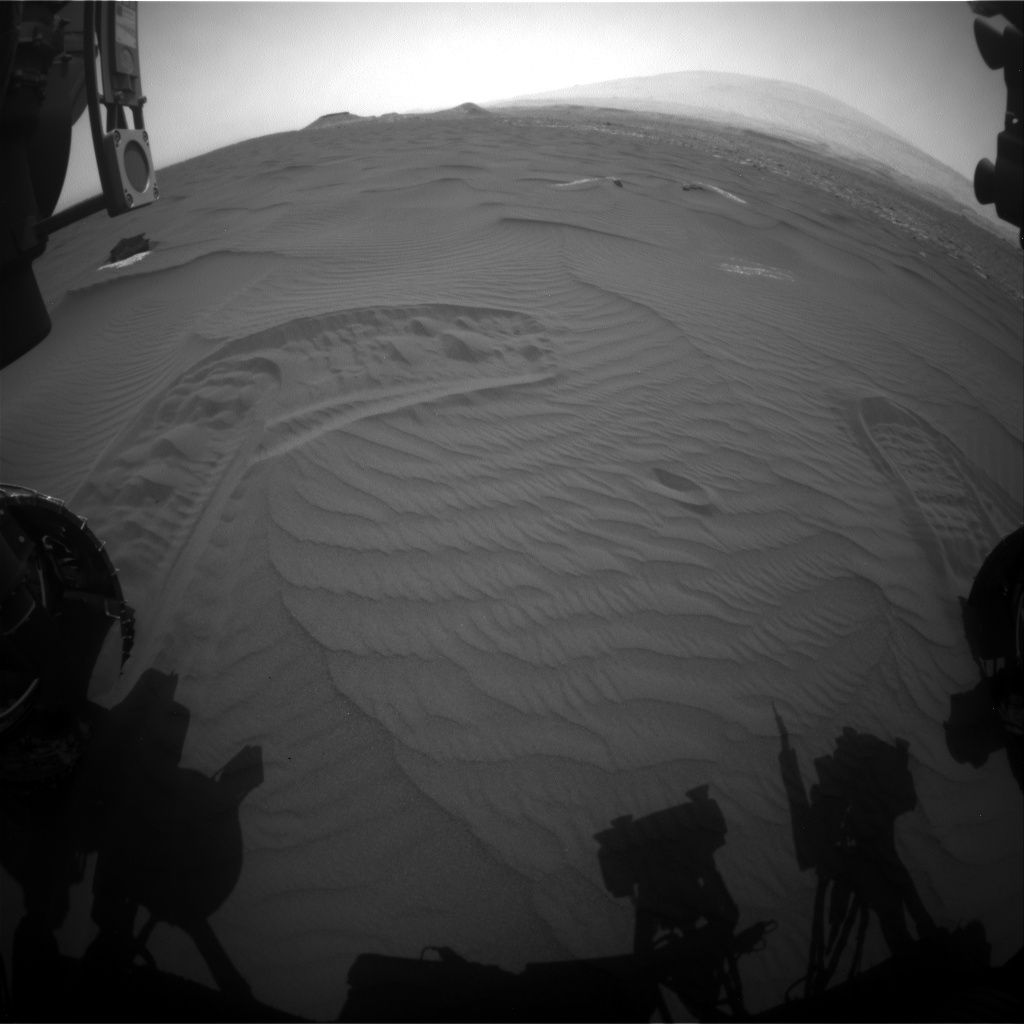
Mars rover Curiosity Navcam Right B image taken Sol 1648, March 26, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is busy working science duties, now in Sol 1651.
“Sol 1650 activities completed as expected, so it’s time to start scooping,” reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
The plan focused on acquiring Scoop #1 and dropping off a portion of the sample to the Sample Analysis at Mars (SAM) Instrument Suite.
Curiosity Front Hazcam Right B image acquired on Sol 1650, March 28, 2017.
Credit: NASA/JPL-Caltech
“This is the first of four intended scoops at this location, aimed at sampling different grain sizes and their composition,” Edgar adds.
Wheel scuff
In the plan, a Mastcam mosaic of “Kennebago Divide” is to document some possible layering exposed by the wheel scuff on the right side of the robot’s workspace.

Curiosity Navcam Right B image taken on Sol 1650, March 28, 2017.
Credit: NASA/JPL-Caltech
“We’ll also take several Mastcam images for change detection to monitor active sand movement,” Edgar notes. Then the arm backbone was slated to start retracting the arm and a vibration was to clean the Alpha Particle X-Ray Spectrometer (APXS).
Ripple crest
After that, the plan called for use of the Mars Hand Lens Imager (MAHLI) to image “Flanders Bay” and Scoop #1 locations (prior to
scooping), and a very close-up image of the “Avery Peak” ripple crest.
“Next up, we’ll acquire Scoop #1! The sample will be sieved, and the fine-grained portion (<150 microns) will be delivered to SAM. These are all very power intensive activities so there wasn’t much room for other science during Sol 1650, but the plan today should accommodate more activities and context observations.

Curiosity Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, acquired this image on Sol 1650, March 28, 2017.
Credit: NASA/JPL-Caltech/MSSS
“In the meantime, sitting on ‘Ogunquit Beach’ is providing a pretty great view,” Edgar concludes.
New traverse map
Meanwhile a new Curiosity traverse map has been released, showing the route taken by the robot trough Sol 1648.

The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CalTech/University of Arizona
This map shows the route driven by NASA’s Mars rover Curiosity through the 1648 Martian day, or sol, of the rover’s mission on Mars as of March 27, 2017.
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1646 to Sol 1648, Curiosity drove a straight line distance of about 23.97 feet (7.31 meters), bringing the rover’s total odometry for the mission to 9.89 miles (15.92 kilometers).

A future Mars protected from the direct solar
wind should come to a new equilibrium allowing an extensive atmosphere to support liquid water on its surface.
Credit: J.L.Green, et al.

Credit for background image: Michael Carroll
What are the prospects for altering the environment of Mars more to our liking?
Can the Red Planet be terraformed was recently spotlighted during last week’s Lunar and Planetary Science Conference (LPSC) held at The Woodlands, Texas.
Terraforming serves up a variety of meanings, be it raising the pressure and temperature enough to allow intermittent liquid water and possible plant growth, to increasing the pressure and temperature so that humans could work directly on the Mars surface, requiring only breathing apparatus to provide oxygen
Two phase approach
A “terraforming timeline” has been outlined by Aaron Berliner at the University of California Berkeley, Berkeley, and Chris McKay of the NASA Ames Research Center, Mountain View, California.
In their LPSC poster paper, they explain that terraforming Mars can be divided into two phases:
- Warming the planet from the present average surface temperature of -60ºC to a value close to Earth’s average temperature to +15ºC, and recreating a thick carbon dioxide (CO2) atmosphere. This warming phase is relatively easy and quick, and could take roughly 100 years.
- The second phase is producing levels of oxygen in the atmosphere that would allow humans and other large mammals to breathe normally. This oxygenation phase is relatively difficult and would take 100,000 years or more, unless one postulates a technological breakthrough.
Wanted: roadmap
The researchers propose, in part, that given the long-term timeline of a possible terraforming endeavor, there’s need to develop a roadmap that outlines the technological processes and advancements required to terraform the Red Planet.
That roadmap would involve adaptation of current and future robotic Martian missions for measuring specific elemental and mineral samples such that a geolocated Martian resource database can be constructed. Also there’s need for mathematical modeling of Martian terraforming to calculate costs for a specific set of terraform-related reactions.

Scene from “Mars,” a National Geographic Channel miniseries.
Credit: National Geographic, Imagine, RadicalMedia, Robert Viglasky
Start now
In addition, Berliner and McKay see a focused synthetic biology initiative for engineering organisms for Martian in-situ resource utilization. In addition they advise development of localized para-terraforming systems for evaluating processes in a controlled area on Martian surface and subsurface via probes.
Furthermore, the researchers envision a planetary protection agreement describing restrictions of terraforming processes “such that Mars can be maintained for future studies and terraforming can be explored beyond experimental and computational means.”
The Mars specialists report that such a roadmap should be started now, as it will require the input from many communities within space sciences, astrobiology, geosciences, and biological sciences.
CO2 deliverables
According to Bruce Jakosky of the Laboratory for Atmospheric and Space Physics at the University of Colorado, Boulder, the terraforming of Mars in the near term is not feasible.

Artist concept of NASA’s Mars Atmosphere and Volatile Evolution (MAVEN) mission.
Credit: NASA/Goddard Space Flight Center
Terraforming Mars would involve putting enough carbon dioxide back into the atmosphere to provide substantial greenhouse warming.
“Is enough CO2 available to do this? No,” explains Jakosky who is also the scientific leader of NASA’s now orbiting Mars Atmosphere and Volatile Evolution (MAVEN) mission that is busily studying the Martian atmosphere.
“It is not feasible today, using existing technology or concepts, to carry out any activities that significantly increase the atmospheric CO2 pressure and/or provide any significant warming of the planet,” he explains in a poster paper presented at the LPSC last week.
Extremely limited
Jakosky and his co-author, Christopher Edwards of Northern Arizona University in Flagstaff, Arizona, conclude that the ability to release enough CO2 into the Mars atmosphere to provide any significant greenhouse warming is “extremely limited.”
This is the case even if most of the CO2 present on early Mars still remained on the planet, locked up in adsorbed gas and carbonates. Greenhouse warming is further limited in the likely event that the bulk of the early CO2 has been lost to space, as suggested by recent measurements.
While greenhouse warming is still conceivable by large-scale manufacturing of chlorofluorocarbons, as some researchers have suggested, this approach “is very far into the future at best.”
To view the full abstracts and more information presented in the two papers, go to:
The Terraforming Timeline
http://www.lpi.usra.edu/meetings/lpsc2017/pdf/1032.pdf
Can Mars Be Terrraformed?
http://www.lpi.usra.edu/meetings/lpsc2017/pdf/1193.pdf

