Archive for the ‘Space News’ Category

Credit: Michael Carroll via Chris McKay
A new plan for the “terraformation” of Mars has been scripted by a research team – a blueprint for the red planet to terraform a site on Mars in 2036.
Called the Lake Matthew Team their Mars Terraformer Transfer (MATT) concept is designed to accelerate Mars exploration, settlement and commercial development.

Mars Terraformer Transfer (MATT) plan makes use of the Shepherd to steer an impactor into Mars.
Credit: Optonicus Corporation
City-region development
“Terraformation need not engineer an entire planetary surface. A city-region is adequate for inhabitation. MATT hits this mark,” explains the group’s website.
Key to the plan are a Shepherd satellite and a small body shepherded for use as an impactor. That impacting body injects heat into Martian bedrock, producing melt water for a lake that persists for thousands of years within the warmed impact zone.
On Mars, the “Omaha Crater” bedrock will remain warm to the touch for thousands of years.

Omaha Crater layout.
Credit: Lake Matthew Team
MATT habs
“Whereas prior designs of habitation structures (habs) were limited to thousands of cubic meters, MATT habs can scale to millions of cubic meters – stadium scale, or greater,” the website notes. Furthermore, the impact site’s treated lake water is sufficient to cover and protect subaqueous domes.

The Omaha Crater site has abundant ground ice to fill and refill the crater’s Lake Matthew.
Credit: Lake Matthew Team
“With scaling, the first Mars habs transition quickly into settlements, with capacity for self-sufficiency, even provisioning of expeditions worldwide. This cuts the Earth-shipped cargo mass, and the expense, of crewed missions,” the website explains.
Museum display
“The MATT Shepherd’s long mission ends with a small adjustment of the satellite’s orbit, placing it into a Mars-resonant orbit that is a bit like an Aldrin cycler orbit,” team members told Inside Outer Space.”
“This positions the Shepherd for retrieval by the colonists at a later date, notionally for museum display on Mars.”
For more information on the group and its Mars Terraformer Transfer (MATT) idea, go to:

Artist concept of the Tianzhou-1 cargo resupply spacecraft now in Earth orbit.
Credit: CMSA
China’s bid to establish a permanently crewed space station got a boost today by the launch of the country’s first cargo supply spacecraft – the Tianzhou-1.
The Tianzhou-1 cargo resupply spacecraft departed in the early evening hours of April 20 atop a Long March-7 Y2 booster from the Wenchang Satellite Launch Center in the southern island province of Hainan.
Space program officials in China declared mission success shortly after launch and the vehicle deployed its solar panels.
The commander of the launching site headquarters of the Tianzhou-1 mission, Zhang Xueyu, announced later that the launch of Tianzhou-1 succeeded as the carrier rocket had sent the vessel into its designated orbit.
“Let me declare now that the launch of Tianzhou-1 is a complete success,” Zhang said at the Wenchang Space Launch Center.

Larger Chinese space station to be constructed on orbit in the 2020s.
Credit: CMSA
Vital element
Tianzhou-1 is a vital element in China’s space station to be pieced together in the 2020s. The supply ship is expected to linkup with the now orbiting, but currently unoccupied Tiangong-2 space lab. A major objective of the mission is to perform refueling tests of the space lab – a prelude to China maintaining a larger space complex in the near-future.
After entering orbit, according to CCTV-Plus interviews with Chinese space officials, Tianzhou-1 is slated to conduct a first docking with Tiangong-2 space lab in a few days. Then the combination will have a two-month in-orbit flight to test the liquid propellant refueling as well as the cargo spaceship’s control of the combination.
The two spacecraft will respectively fly for three months, during which the cargo spaceship will complete its own space science experiments. Then the two will have the third docking to test the automatic fast-docking technology – a test to complete the docking within six hours.

Credit: CMSA
Extensive ground testing
According to Chinese space authorities, there have been more than 600 ground tests that demonstrated Tianzhou-1/Tiangong-2 docking hardware.
“A space station has two docking ports, forward and backward. So a cargo spacecraft must be able to dock with the station from both directions. This time Tianzhou-1 will separate from Tiangong-2’s backward port and then fly around it to dock from the forward port to examine the docking ability. This is the primary mission of the combination,” said Bai Mingsheng, chief designer of the Tianzhou-1 cargo spaceship from the China Academy of Space Technology.
“These are new experiments,” said Bai. “A shorter docking time for manned spaceships is of great significance as it will make astronauts more comfortable,” Bai added to the CCTV-Plus interview.
After its boost into Earth orbit, Tianzhou-1is now on track to dock with the Tiangong 2 space laboratory, or “Heavenly Palace 2”, where two astronauts spent a month last October in China’s longest ever piloted space trek – a Shenzhou-11 mission that totaled 33 days.
For CGTN video of the Tianzhou-1 liftoff, go to:
https://news.cgtn.com/news/3d41544f30557a4d/share_p.html
For a CCTV-Plus video of the liftoff, go to:
http://pv.news.cctvplus.com/2017/0420/8048405_Preview_1285.mp4

Tianzhou-1 supply ship.
Credit: CCTV-Plus
A key element in China’s hope to establish a permanent space station is set for liftoff on Thursday.
China’s automated Tianzhou-1 vehicle is scheduled for launch at 19:41 Thursday (local time) from Wenchang Space Launch Center in southern China’s Hainan Province, officials of the Office of China’s Manned Space Program said Wednesday.
Space lab docking
The cargo spacecraft will be carried into orbit by a Long March-7 Y2 carrier booster. It made its maiden flight in June 2016.
Tianzhou-1 is expected to operate in orbit at an altitude of 380 kilometers before docking with the orbiting and currently unoccupied Tiangong-2 space lab. A major objective is to perform refueling tests of the space lab – a prelude to China maintaining a larger space complex in the 2020s.
Combo control
After entering orbit, according to CCTV-Plus, Tianzhou-1 is slated to conduct a first docking with Tiangong-2 space lab. Then the combination will have a two-month in-orbit flight to test the liquid propellant refueling as well as the cargo spaceship’s control of the combination.
Credit: CMSA
“A space station has two docking ports, forward and backward. So a cargo spacecraft must be able to dock with the station from both directions. This time Tianzhou-1 will separate from Tiangong-2’s backward port and then fly around it to dock from the forward port to examine the docking ability. This is the primary mission of the combination,” said Bai Mingsheng, chief designer of the Tianzhou-1 cargo spaceship from the China Academy of Space Technology.
Fast-docking
After the experiment, Tianzhou-1 will separate again from Tiangong-2 space lab.
The two spacecraft will respectively fly for three months, during which the cargo spaceship will complete its own space science experiments. Then the two will have the third docking to test the automatic fast-docking technology – a test to complete the docking within six hours.
“These are new experiments,” said Bai. “A shorter docking time for manned spaceships is of great significance as it will make astronauts more comfortable,” Bai added to the CCTV-Plus interview.

China’s medium-size space station for the 2020’s is depicted in this artwork.
Credit: CNSA
Relay satellite
In related news, China’s Tianlian-1 relay satellite, through three relay routes on the Tianzhou-1, will be able to track its docking with the Tiangong-2 space lab and the propellant fuelling.
“The spacecraft is equipped with relay terminals. It now becomes less dependent on ground stations as the space-based observation and communication system works with the help of the relaying satellites,” said Zhu Ke, deputy chief designer, Tianzhou-1 Cargo Spacecraft Observation and Communication System Department, Fifth Academy of China Academy of Space Technology.
“Therefore, we can expand the system’s coverage from previous 20 percent to current 88 percent,” Zhu said in a CCTV-Plus interview.
According to Zhu, the system will also greatly accelerate the spacecraft’s communication speed.
Go to these CCTV-Plus videos regarding the upcoming launch of the supply ship and the use of the Tianlian-1 relay satellite system:
Also, go to:
http://pv.news.cctvplus.com/2017/0419/8048263_Preview_1672.mp4
http://pv.news.cctvplus.com/2017/0419/8048319_Preview_4900.mp4
Lastly, go to this informative article by Namrata Goswami:
Why China’s New Cargo Space Ship Is So Important
The Tianzhou cargo ship may not grab headlines, but it’s another step forward in China’s long-term space plan.
http://thediplomat.com/2017/04/why-chinas-new-cargo-space-ship-is-so-important/

NASA’s Spitzer Space Telescope has revealed the first known system of seven Earth-size planets around a single star.This artist’s concept allows us to imagine what it would be like to stand on the surface of the exoplanet TRAPPIST-1f, located in the TRAPPIST-1 system in the constellation Aquarius.credit:
Credit: NASA/JPL-Caltech
Breakthrough Initiatives is holding its second annual scientific conference on April 20-21 at Stanford University.
The event is set to bring together leading astronomers, engineers, astrobiologists and astrophysicists to advance discussion surrounding recent discoveries of potentially habitable planets in nearby star systems.
Novel methods of exploration

Credit: Breakthrough Initiatives
The two days of discussions will focus on newly discovered Earth-like “exoplanets” in the Alpha Centauri and TRAPPIST-1 planetary systems, and new evidence that these planets could be habitable, as well as their potential as targets for novel methods of space exploration.
“The Breakthrough Discuss conference brings together many of the leading minds to advance the conversation on the potential for life on other worlds and to interrogate the conflicting theories and hypotheses prompted by this new data,” explains S. Pete Worden, Executive Director of the Breakthrough Initiatives in a press statement.

Credit: Breakthrough Initiative
Practical interstellar probe
The two-day event will feature three sessions of 19 presentations and 15 panelists.
— Recent observations of nearby planets, including Proxima b, and new techniques for observing them.
— The possibility of intelligent life in Earth’s cosmic neighborhood, and recent attempts to search for it with Breakthrough Listen.
— The third session will assess the significance of the newly-discovered exoplanets for the long-term Breakthrough Starshot endeavor, a program spearheaded by Yuri Milner to develop a practical interstellar space probe.
Join live
The conference on April 20-21 will be broadcast on Facebook Live at:
www.Facebook.com/BreakthroughPrize
A detailed schedule can be found at:

Tianzhou-1 atop Long March-7 Y2 carrier rocket.
Credit: CGTN
Preparatory work for launch of China’s first cargo spacecraft launch – the Tianzhou-1 — continues.
Work is in the homestretch for a launch that is set between Thursday and next Monday.
On Feb. 13, the Tianzhou-1 was delivered to Wenchang Space Launch Center in south China’s Hainan Province.
On March 11, the Long March-7 Y2 carrier rocket was transported to the center. The Tianzhou-1 will blast off on the Long March-7 Y2.
A week later, the vertical assembly of the Long March-7 Y2 carrier rocket was finished.
A Chinese tracking ship, Yuanwang-7, set sail on April 10 for its first independent voyage into the Pacific Ocean to start its maritime space monitoring and communication mission for Tianzhou-1.
Credit: CMSA
In-orbit testing
Last Monday, the Tianzhou-1 was vertically transported to the launch tower in 2.5 hours.
If the supply ship is successfully orbited, it will dock with the Tiangong-2 space lab for three times to test in-orbit liquid propellant refueling.
The mission is viewed by China’s space planners as a crucial step toward China’s goal of establishing its own space station around 2022.
Wenchang visitors
In a related CCTV-Plus story, as final preparations move forward on the Tianzhou-1 liftoff, space enthusiasts and students are taking the opportunity to visit a nearby space science education center to learn more about the wonders of space exploration.

Wenchang Space Launch Center in south China’s Hainan Province.
Credit: CCTV
Located just a short walk from China’s newest and only coastal launch site, the Wenchang Space launch center, visitors to the education center can learn about the history of space flight, gaze at rocket components and model spacecraft, and even immerse themselves in virtual reality experiences to get a better understanding of China’s developing space program.
Theme park
The space education center is only part of a larger space theme park, with the park’s investors planning to build more facilities in the future to integrate tourism with academic exchanges and science education.
“In addition to this science center, we are going to introduce more high-tech experience facilities and provide better services for tourists. This space theme park will build on the experiences of the Houston Space Center in the U.S. and other space theme parks around the world,” said Wang Xiaojia, deputy manager of the Wenchang Tourism Investment Holding company, during the CCTV-Plus interview
The park is expected to be finished by the end of this year.
Space day
Meanwhile, China is also ready to celebrate its second Space Day.
According to the State Administration of Science, Technology and Industry for National Defense, China designated April 24 as the Space Day last year, when the country marked the anniversary of the country’s first satellite launch Dongfanghong-1 in 1970.

Dongfanghong-1 – China’s first satellite.
Courtesy: Sven Grahn
As reported by CCTV-Plus, the celebration activities will include talks by astronauts, an exhibition at the Northwestern Polytechnical University and other activities focusing on the applications of space technology in economic and social development, the Administration announced on Monday.
Aerospace facilities
The exhibition will show the achievements in China’s lunar probe and the BeiDou satellite navigation system. Some aerospace facilities, labs and workshops will be open to the public, especially to middle and primary school students on the day.
To be present at the main theater of the activities in Xi’an City, Shaanxi Province, northwest China, representatives from the United Nations Office for Outer Space Affairs and the Asia-Pacific Space Cooperation Organization, and foreign diplomats from a dozen countries including Egypt, Saudi Arabia and Chile.
Xi’an is home to more than 200 aerospace research centers and enterprises.
There will be more than 200 events in other cities as well.
To view the CCTV-Plus videos, go to:
Tianzhou-1 Launch preparations:
http://cd-pv.news.cctvplus.com/2017/0418/8048156_Preview_9607.mp4
Wenchang Education center:
http://cd-pv.news.cctvplus.com/2017/0417/8048069_Preview_7520.mp4
China Space Day:
http://cd-pv.news.cctvplus.com/2017/0418/8048194_Preview_1276.mp4
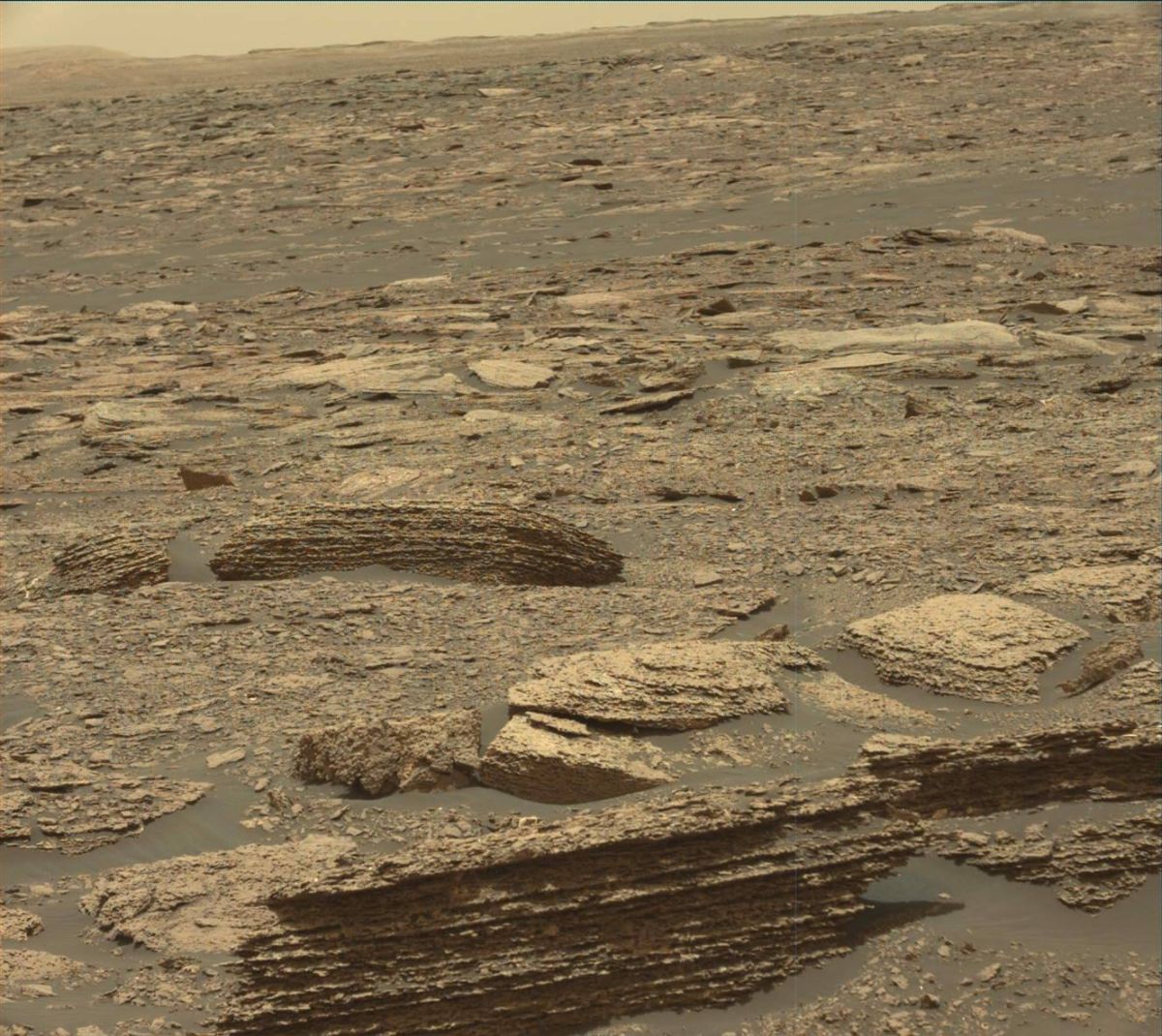
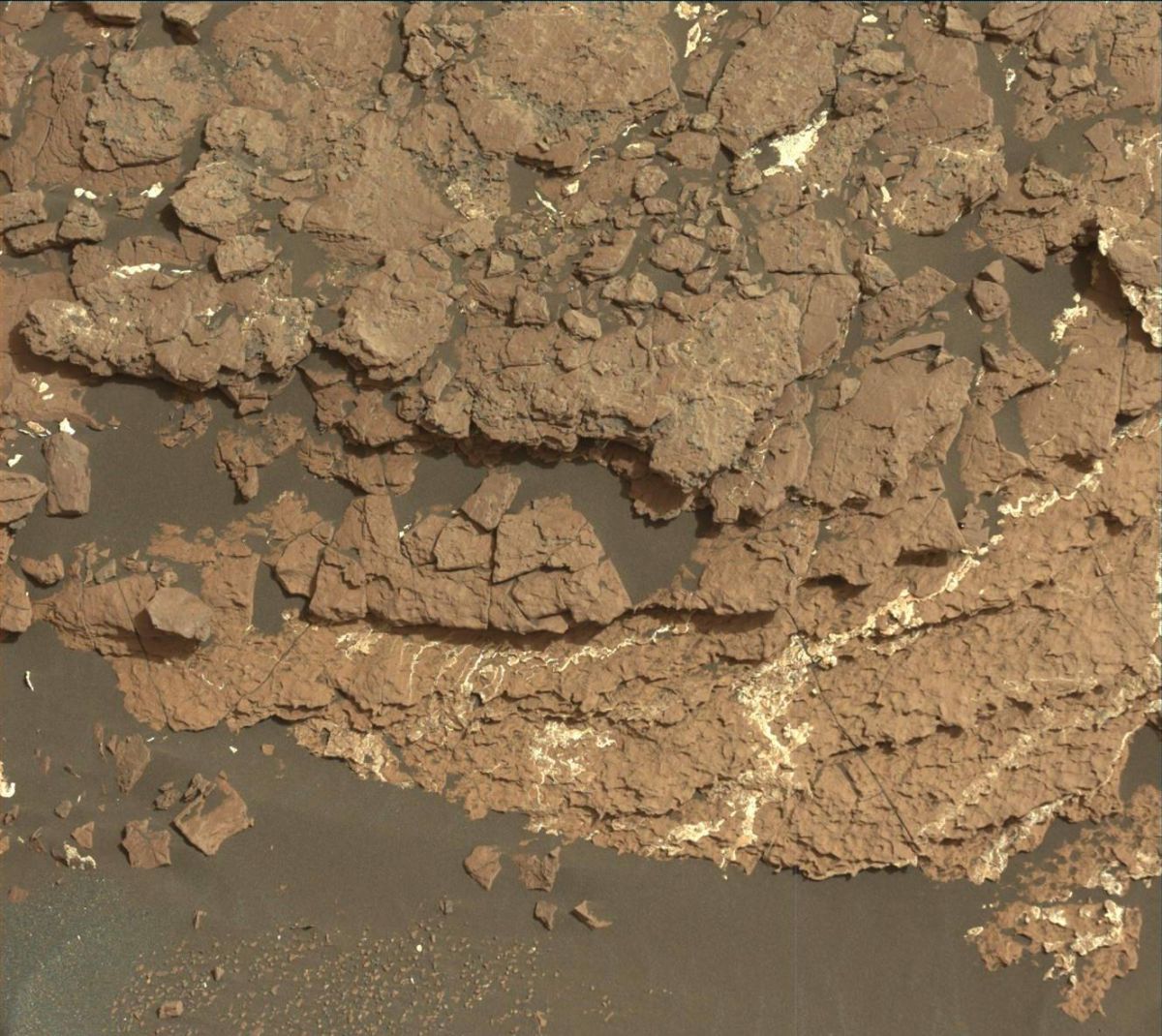
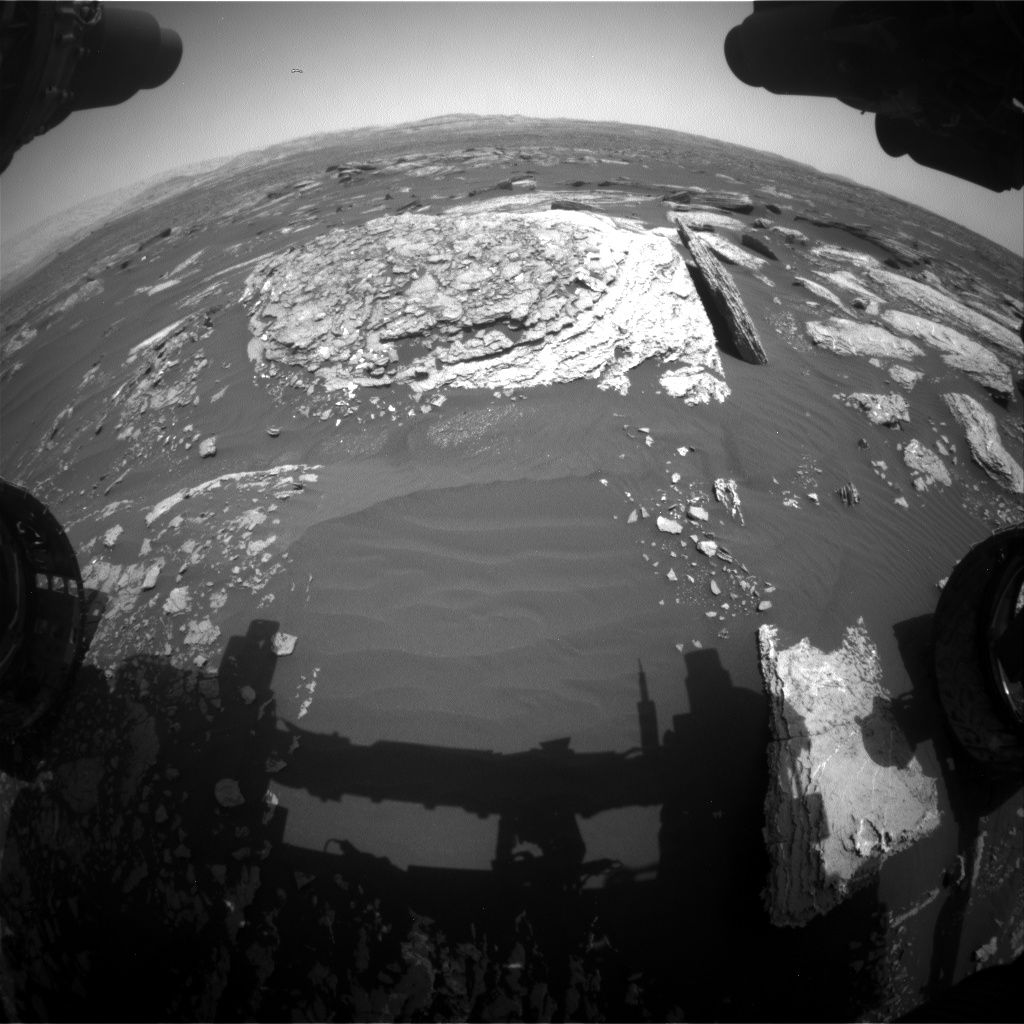
Curiosity Mastcam Left image acquired on Sol 1669, April 17, 2017.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover has just begun Sol 1671 activities.
Reports Roger Wiens, Curiosity’s Chemistry & Camera (ChemCam) Principal Investigator, the rover has nailed a drive of 112 feet (34 meters) to another rock exposure identified in orbital images.
Mud cracks
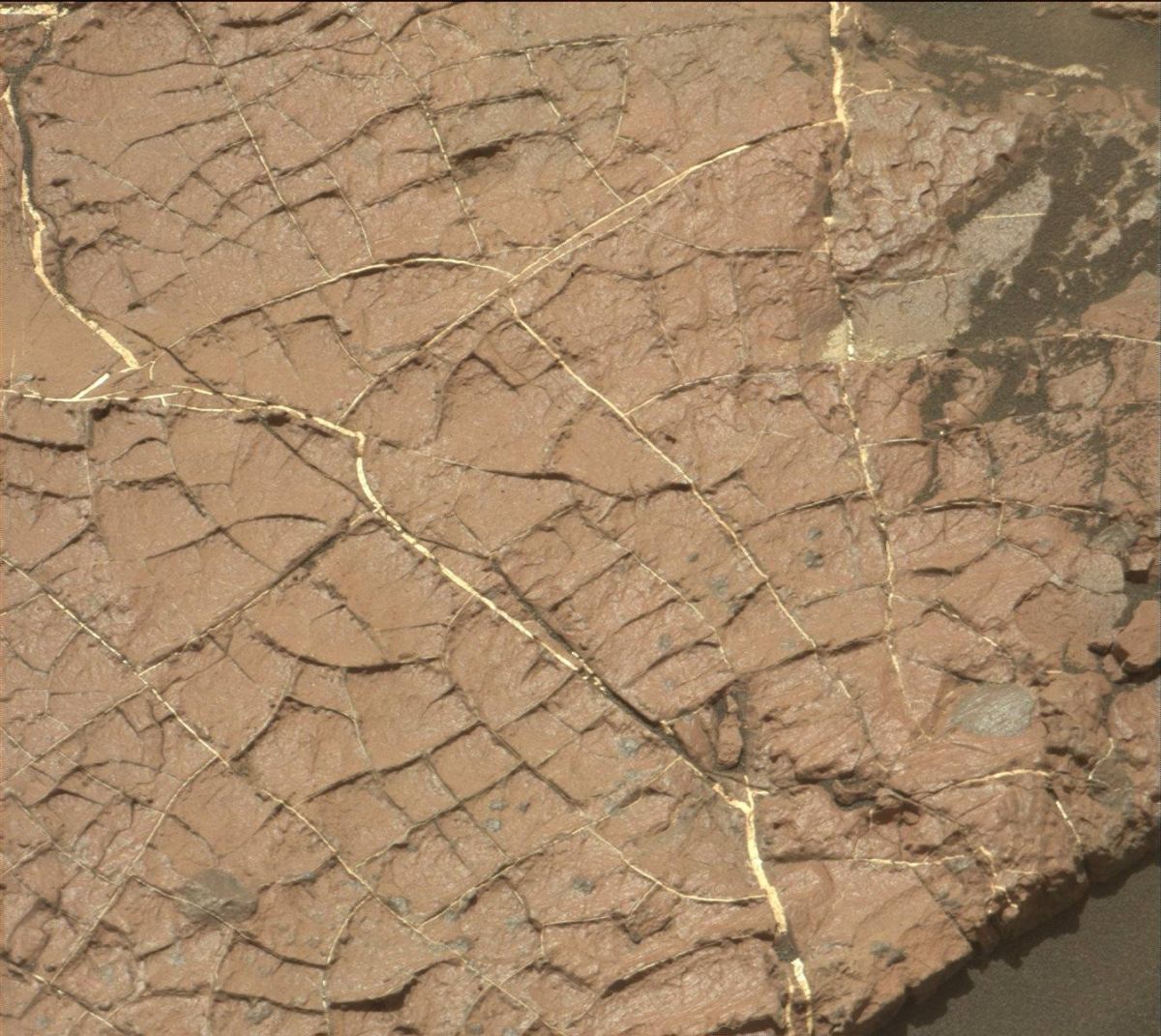
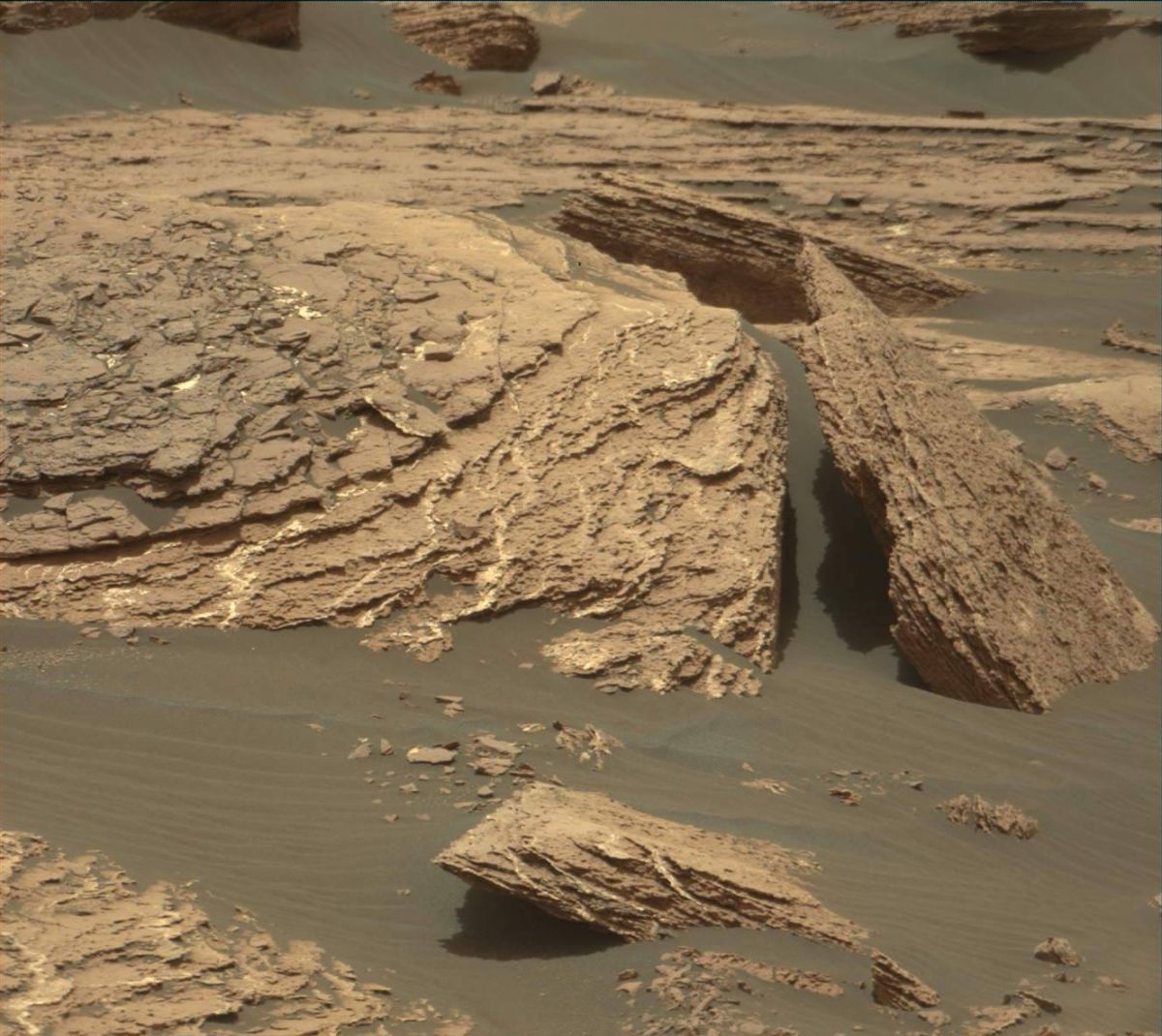
Curiosity Mastcam Right image of “Old Soaker,” taken on Sol 1568, January 3, 2017. Credit: NASA/JPL-Caltech/MSSS
“Ever since we observed possible mud cracks at Old Soaker,” Wiens said, “the rover team has been pursuing the idea that Curiosity is exploring strata that represent occasional dry-lake periods.”
Interesting rocks
As the rover drives further from the dunes, Wiens added, “it is nice to be seeing more and more interesting rocks out the front window.”
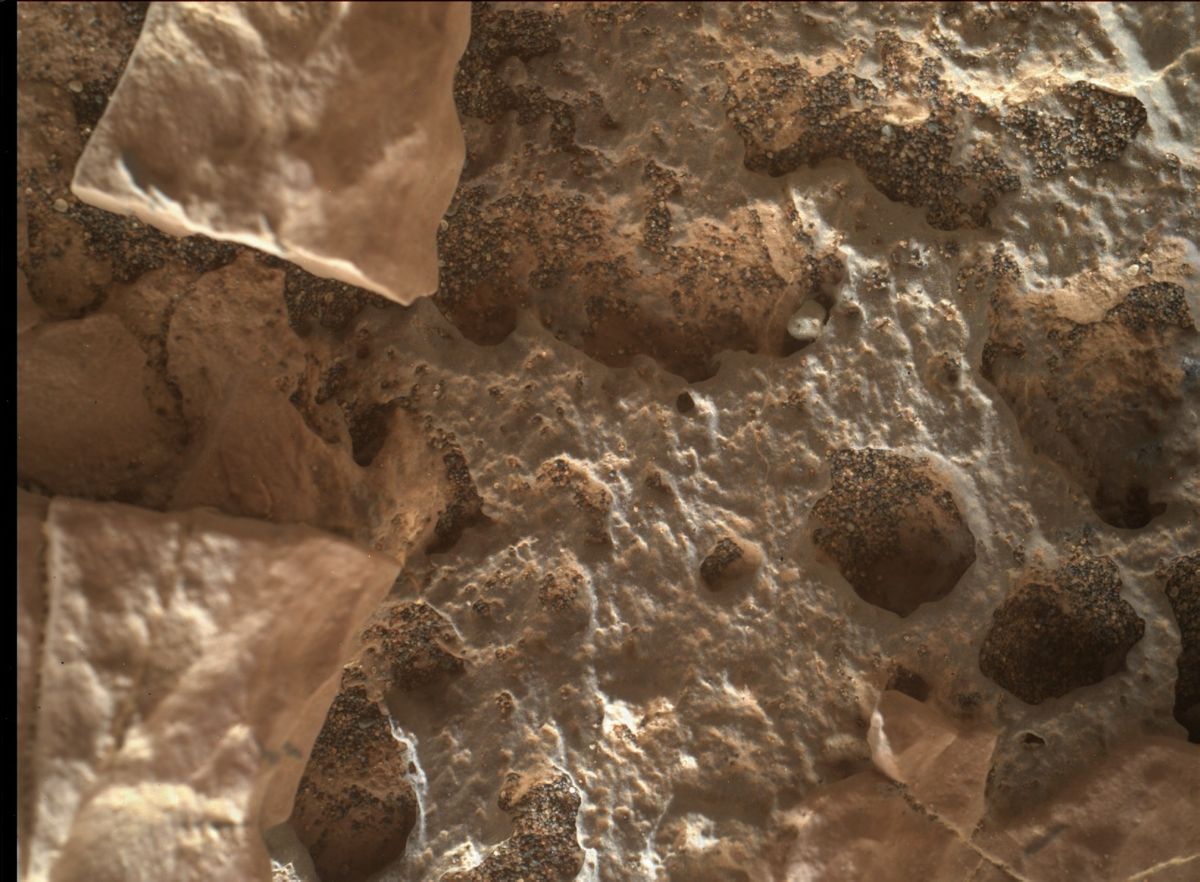
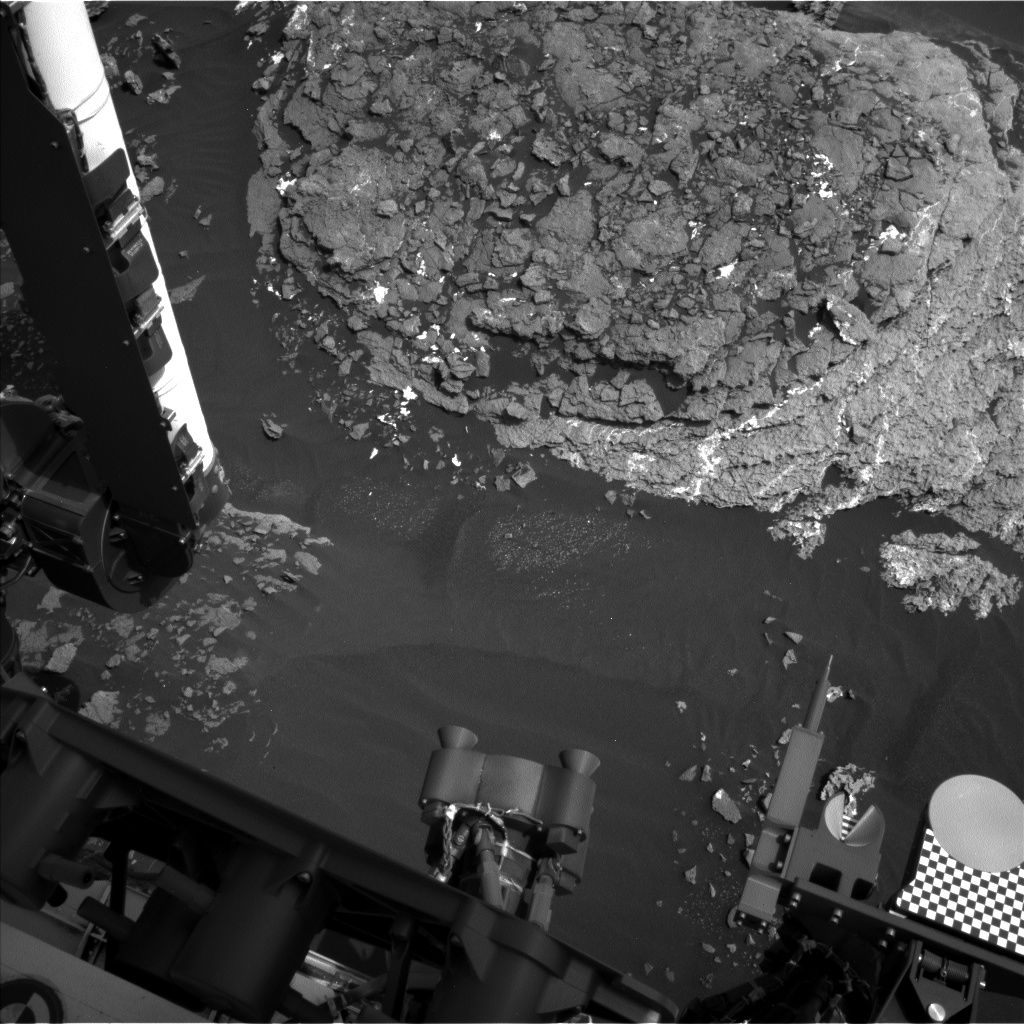
Curiosity Mars Hand Lens Imager (MAHLI) photo, acquired on Sol 1668, April 16, 2017.
Credit: NASA/JPL-Caltech/MSSS
The main activities in the plan that were sent up on Monday to Curiosity included a 9×7 Mastcam mosaic of the rock outcrop “Jellison Cove,” along with Mars Hand Lens Imager (MAHLI), Alpha Particle X-Ray Spectrometer (APXS), and ChemCam on “Deer Isle,” and a second ChemCam analysis of “Calf Island.”
Credit: CMSA
China is set to launch its first cargo resupply craft – the Tianzhou-1 – in the April 20-24th time period and is viewed by the country’s space officials as a key step toward building a larger space station in the 2020’s.
Tianzhou-1 has been transferred atop its Long March-7 Y2 carrier rocket from the testing center to the launch zone in Wenchang, south China’s Hainan Province.

Chinese supply ship — Tianzhou-1 — undergoing pre-flight checks.
Credit: CMSA
According to the state-run Xinhua news agency, the transfer to the launch zone took 2.5 hours.
Since February, rocket technicians have been testing both the Tianzhou-1 and the carrier rocket for the upcoming launch.
“Once the combination is transported onto the launching tower, this mission enters its final stage. At present, all work is going smoothly, and we are ready for refueling and launching,” said Mao Wanbiao, deputy commander of the command office at the launch site in a CCTV-Plus interview.
Refueling tests
Tianzhou-1 is slated to dock with the now orbiting Tiangong-2 space lab and perform a series of in-orbit refueling tests.

China’s Tiangong-2 space lab as imaged by skywatcher, Mariano Ribas.
Credit: Mariano Ribas
The Tianzhou-1 supply craft, if successfully launched, is expected to dock with the Earth-circling and now unoccupied space lab three times. During the docking, a new experiment of independent quick docking will be conducted, which requires that the two spacecraft dock with each other within six hours.
In recent video reports via CCTV-Plus, details of the Tianzhou-1 cargo spacecraft show it to be 35 feet (10.6 meters) tall with its largest diameter at 11 feet (3.35 meters) and a weight of 13 tons. The upper part with the bigger diameter is designated as a warehouse while the lower part with smaller diameter will propel the spacecraft.
Tianzhou-1 – “heavenly vessel” — will be able to carry about five tons of cargo into space.
Optimized booster
This is the second flight of a Long March-7 booster. It completed its maiden flight mission on June 25, 2016 from the launch site in Wenchang. The Long March-7 Yao-2 type launcher has been optimized for lofting the Tianzhou-1.
Xinhua reported earlier that Tianzhou-1 will orbit on its own for about three months and together with Tiangong-2 for about two months after their rendezvous.
Tianzhou-1’s flight will check and verify such technologies as supply of goods, in-orbit re-fueling and fast automated rendezvous and docking.
With tasks completed, the autopiloted Tianzhou-1 will fall back to Earth while Tiangong-2 is to remain in orbit and continue conducting experiments.

Credit: CSIS
Shenzhou-11
The Tiangong-2 space lab was occupied by the two-person crew of Shenzhou-11 last year. It was China’s sixth piloted spaceflight, and also the country’s longest mission to date, chalking up in total 33 days.
After the Shenzhou-11 liftoff on October 17, the spacecraft docked two days later with Tiangong-2. The two astronauts — Jing Haipeng and Chen Dong — lived and worked in the lab for 30 days.
For Chinese space program officials, the Tianzhou-1 resupply mission wraps up a second phase of China’s piloted space agenda and is a vital milestone for the country to establish a larger space station around 2022.
Core module
Meanwhile, China is readying a space station core module for flight in 2018, one of many segments that will comprise the orbiting complex.
Larger Chinese space station to be constructed on orbit in the 2020s.
Credit: CMSA
Assembly of that central module — named “Tianhe-1” — has already been completed and tests are currently under way, reports Bao Weimin of the China Aerospace Science and Technology Corp. (CASC).
The Chinese space station will initially be much smaller than the current International Space Station (ISS), but could be expanded for future scientific research and international cooperation, according to the country’s space officials.
Given present plans to retire the ISS in 2024, China’s space station will be the only country with a permanent space station.
According to Bao, the larger Chinese outpost will function in orbit for “dozens of years,” adding that all key parts of the facility are designed to be serviceable and replaceable.
For a video look at the transfer of booster and supply craft at Wenchang, go to this video from China Global Television Network:
https://video.twimg.com/amplify_video/853940080129396736/vid/1280×720/8iW5eHNoSbZOO999.mp4
Also, go to this CCTV-Plus video at:
http://cd-pv.news.cctvplus.com/2017/0417/8048093_Preview_3175.mp4
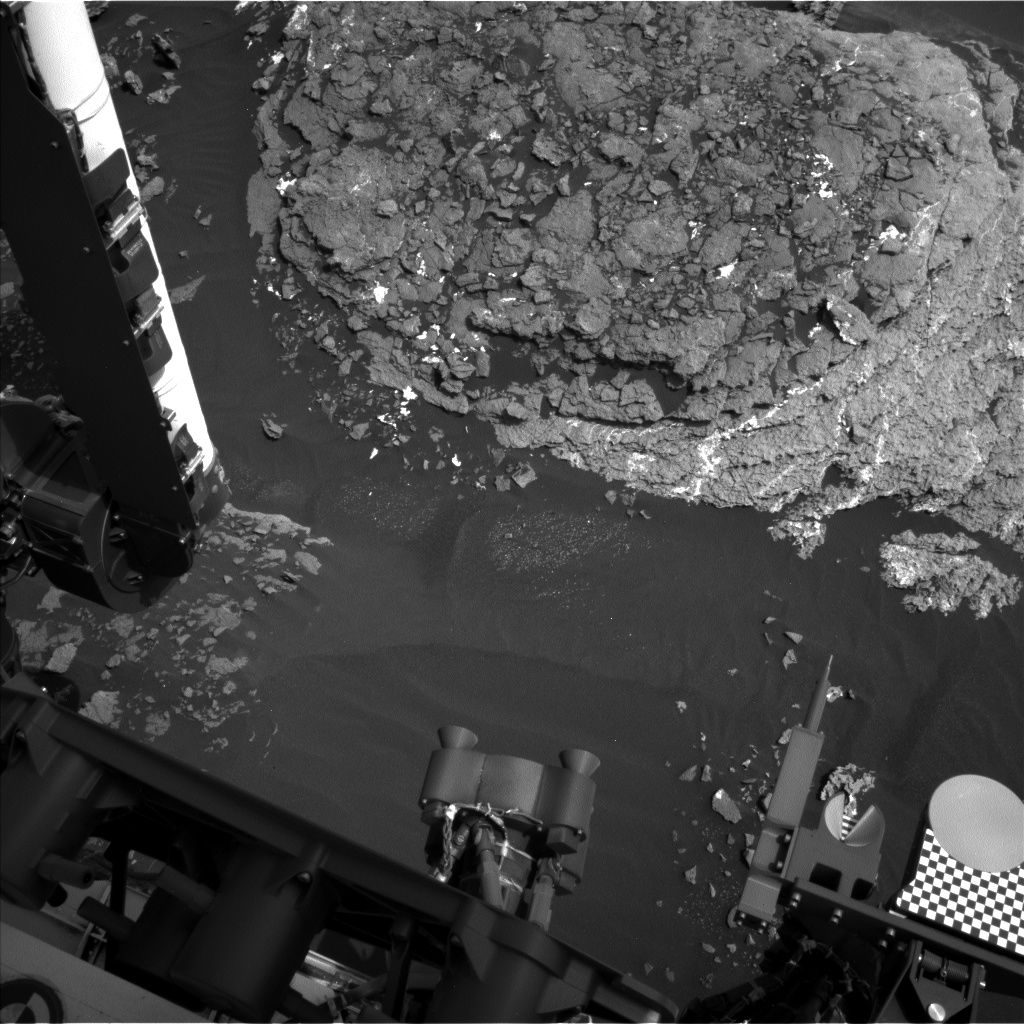
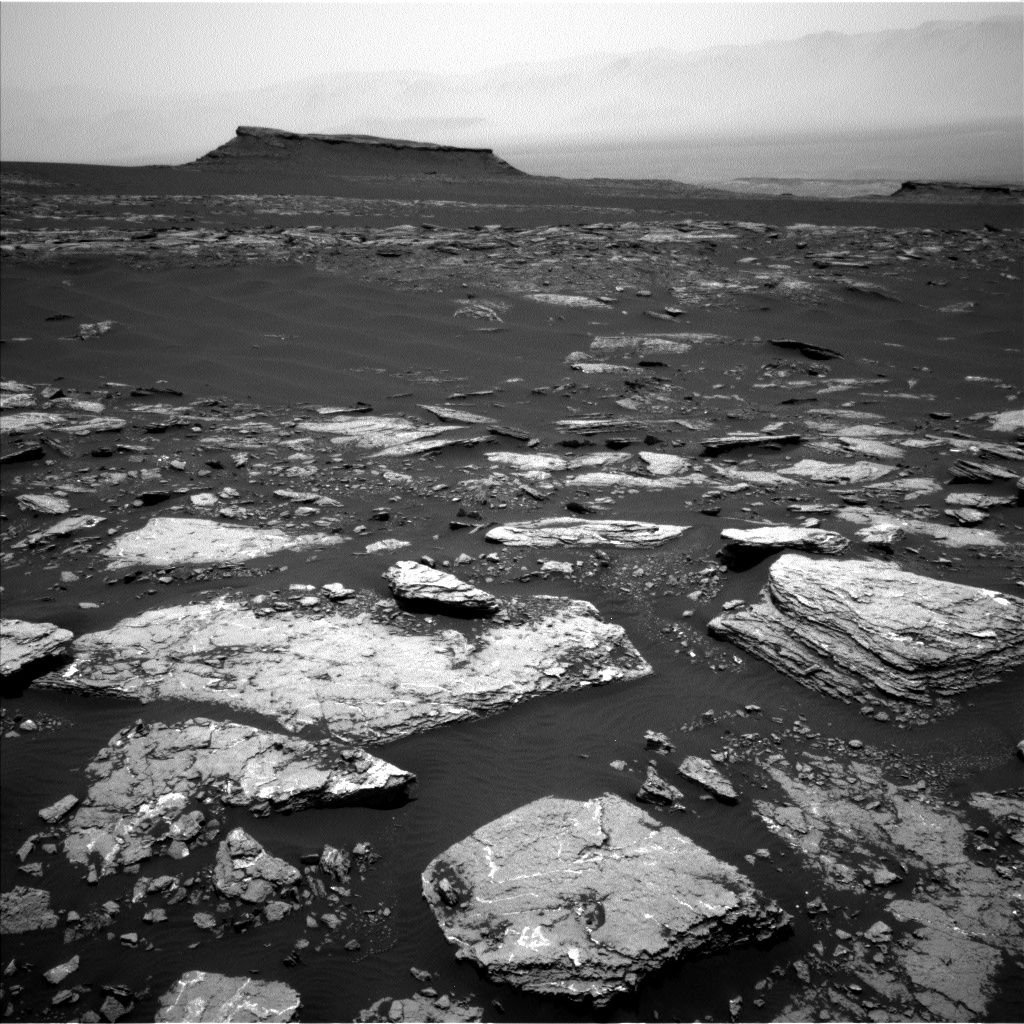
Curiosity Navcam Left B image acquired on Sol 1666, April 14, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on Mars has just begun Sol 1668.
A drive by the robot has put it into position in front of the interesting “Moosehead Lake” outcrop with lots of veins and grey patches, “plenty to keep Curiosity busy over the weekend!”
That’s the word from Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona and Michael Battalio, a Ph.D. candidate in atmospheric science at Texas A&M.
Curiosity Mastcam Left image taken on Sol 1666, April 14, 2017.
Credit: NASA/JPL-Caltech/MSSS
Long science block
The Sol 1668 plan is to start off with a long science block.
Curiosity’s Chemistry & Camera (ChemCam) is to make observations of targets “Sheldrake Island,” “Crabtree Neck,” “Waukeah Neck,” “Morancy Stream” and “Ogden Point.”
This is to be followed by a dust devil survey and several Mastcam mosaics. These include one covering Moosehead Lake, a few frames to extend the coverage of the area near the rover, and a big 22 frame mosaic of the outcrop at the rover’s next stop.
The robot’s Mastcam is slated to also take a picture of the ChemCam auto-targeted location after the drive. After that the Mars Hand Lens Imager (MAHLI) is to acquire pictures of the targets “Morancy Stream” and “Sheldrake Island” and then the Alpha Particle X-Ray Spectrometer (APXS) is on tap to analyze those two targets.
Curiosity Navcam Left B image acquired on Sol 1666, April 13, 2017.
Credit: NASA/JPL-Caltech
Atmospheric scans
On Sol 1669, the robot’s arm is to be retracted for the next drive, followed by post-drive imaging and a Mars Descent Imager (MARDI) observation in the evening.
On Sol 1670, the plan calls for a short morning block of atmospheric observations and a longer afternoon block containing a Mastcam image of the rover deck, another dust devil observation, and an auto-targeted ChemCam observation.
“We will wrap up Sol 1670 with some observations of the dust in the atmosphere to compare with the morning,” report Anderson and Battalio.
Environmental science
A recap of environmental science done over the last week has Curiosity acquiring the usual Rover Environmental Monitoring Station (REMS) and Dynamic Albedo of Neutrons (DAN) measurements. In addition, the rover performed Navcam cloud observation movies throughout the week.
The pointing direction of the cloud movies was shifted from north-facing to south-facing to avoid the sun. The movies will remain pointed towards the south until just after the southern hemisphere spring equinox in May 2018.
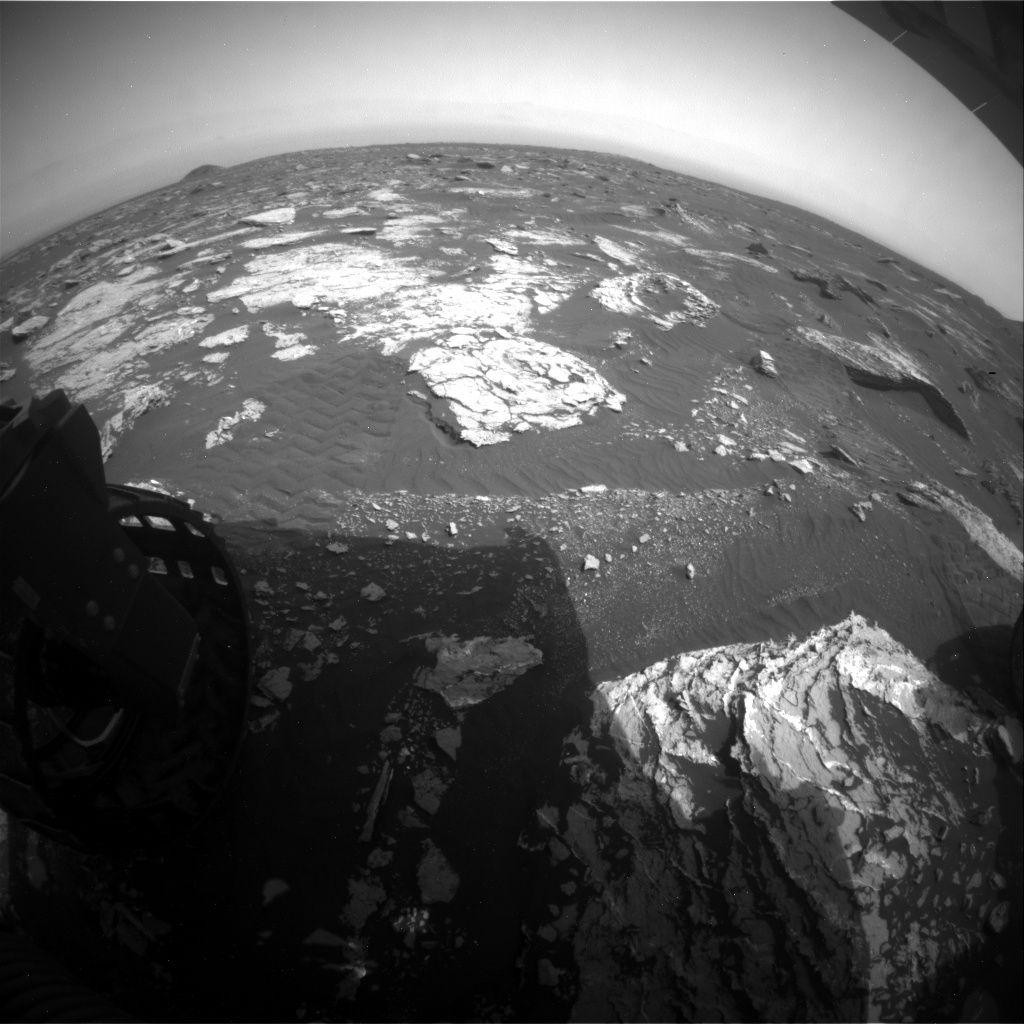
Curiosity Rear Hazcam Right B image acquired on Sol 1667, April 14, 2017.
Credit: NASA/JPL-Caltech
Also, there was a Navcam dust devil survey on Sol 1670, as well as one earlier in the week on sol 1668.
Also captured earlier last week was a ChemCam passive sky observation on sol 1665 that had been previously dropped twice from the plan due to the DSN outage two weeks ago and sun safety issues the week before.
Difficult sky observations
“Planning passive sky observations is difficult,” Anderson and Battalio report, “they are among the most time consuming and time constrained atmospheric observations.”
This is because the observation requires ChemCam to take passive spectra of the sky at two different azimuths and the instrument must avoid the Sun’s path as it slews between those locations, the two Mars scientists add. “This can be difficult near equinoxes when the Sun passes directly overhead!”
As always, carrying out planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
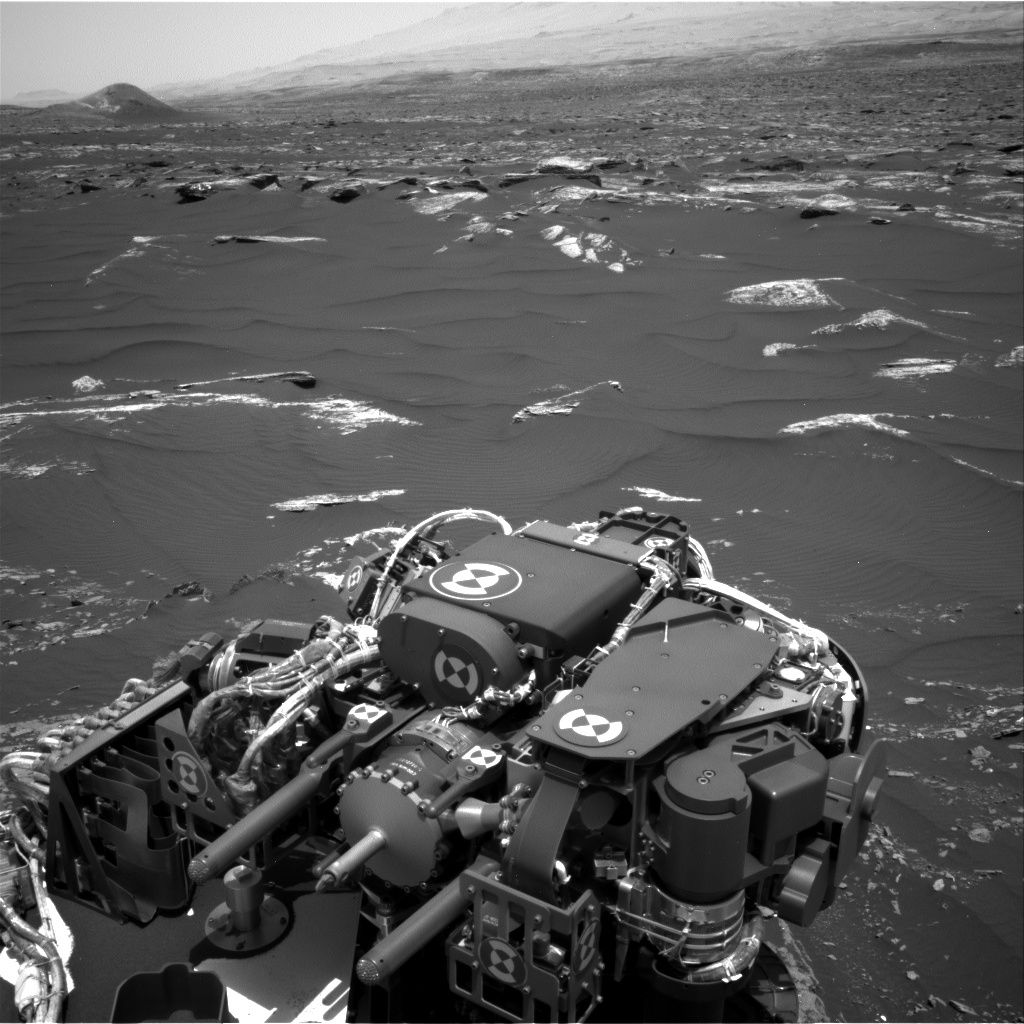
Curiosity Navcam Right B image taken on Sol 1666, April 13, 2017.
Credit: NASA/JPL-Caltech
Now at work during Sol 1667, NASA’s Curiosity Mars rover had its drive cut short during Sol 1664. The robot had driven less than 6 feet (2 meters) then halted due to the angle of the left bogie wheel side that slightly exceeded the suspension limit.
“Such limits are routinely set based on the results of detailed modeling of the vehicle’s response to the terrain, so that unexpected conditions will automatically cause the rover to stop and wait for further instructions,” reports Ken Herkenhoff, a rover scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Later analysis of the vehicle’s orientation showed nothing that concerned the mobility team, so a drive was planned for Sol 1666.
Curiosity Front Hazcam Right B image acquired on Sol 1666, April 13, 2017.
Credit: NASA/JPL-Caltech
Outcrop target
Before the drive, Curiosity’s Chemistry & Camera (ChemCam) and Right Mastcam were slated to observe a vein target named “Ingalls Island,” a nearby outcrop target dubbed “Yellow Island,” and color boundary targets called “Bunker Cove” and “Cromwell Cove.”
The rover’s Mastcam was then to acquire a multispectral observation of Moosehead Lake, the drive goal.
Curiosity Navcam Left B image taken on Sol 1666, April 14, 2017.
Credit: NASA/JPL-Caltech
After the drive and usual post-drive imaging, the arm will be unstowed for more drill diagnostic tests and moved out of the way for Navcam and Left Mastcam imaging of the arm workspace, to support planning today.
Autonomously-selected target
Later in the afternoon, Mastcam was slated to measure dust in the atmosphere, Navcam will search for clouds, and the auto-software (AEGIS) was to acquire a ChemCam observation of an autonomously-selected target.
Curiosity Mastcam Right image taken on Sol 1664, April 11, 2017.
Credit: NASA/JPL-Caltech/MSSS
The Sol 1667 plan was to begin with Navcam searches for dust devils and clouds above the horizon. In the afternoon, ChemCam will acquire calibration data.
“The rover will then get some sleep before what could be a busy weekend plan,” Herkenhoff adds.
Location, location, location
Meanwhile, the Jet Propulsion Laboratory has released a new map showing Curiosity’s location as of Sol 1664, April 12, 2017.
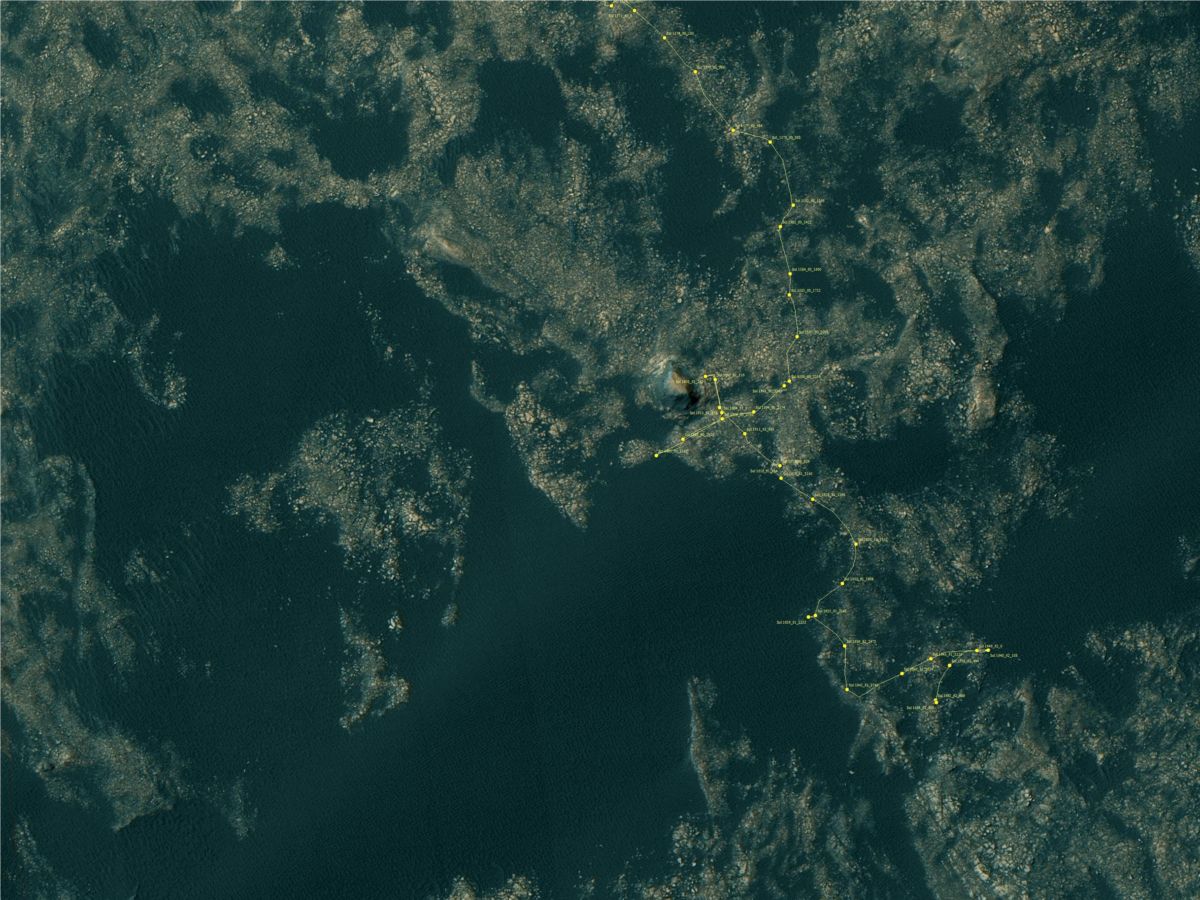
Credit: NASA/JPL-CalTech/University of Arizona
This map is periodically updated by the mission team as Curiosity drives on its way to the base of Mount Sharp.
Numbering of the dots along the line indicate the sol number of each drive. North is up.
From Sol 1662 to Sol 1664, Curiosity had driven a straight line distance of about 4.96 feet (1.51 meters).
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 9.93 miles (15.98 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Credit: NASA
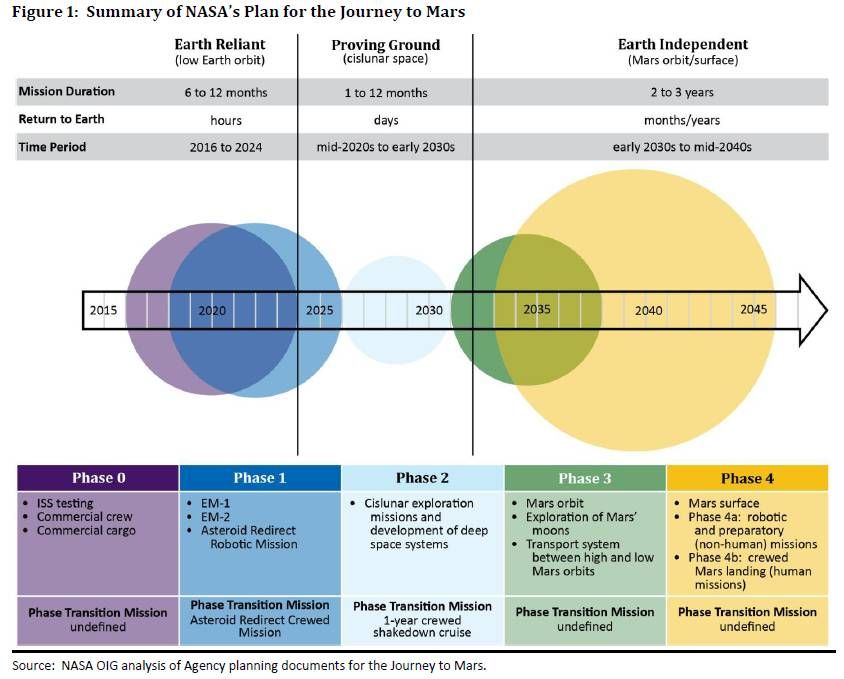
The Office of Inspector General (OIG) at NASA evaluated the space agency’s plans for deep space exploration and crewed missions to Mars.
The April 13, 2017 OIG report notes:
NASA’s initial exploration missions on its Journey to Mars – EM-1 and EM-2 – face multiple cost and technical challenges that likely will affect their planned launch dates.
Although the Agency’s combined investment for development of the SLS, Orion, and Ground Systems Development and Operations (GSDO) programs will reach approximately $23 billion by the end of fiscal year 2018, the programs’ average monetary reserves for the years leading up to EM-1 are much lower than the 10 to 30 percent recommended by Marshall Space Flight Center guidance.
Credit: NASA/OIG
Low monetary reserves
Low monetary reserves limit the programs’ flexibility to cover increased costs or delays resulting from unexpected design complexity, incomplete requirements, or technology uncertainties. Moreover, software development and verification efforts for all three programs are behind schedule to meet a November 2018 EM-1 launch.
NASA does not have a life-cycle cost estimate or integrated schedule for EM-2, which makes it difficult for Agency officials and external stakeholders to understand the full costs of EM-2 or gauge the validity of launch date assumptions.

International Space Station.
Credit: NASA
International Space Station: implications
NASA’s decision whether to continue spending $3 to $4 billion annually to maintain the International Space Station after 2024 will affect its funding profile for human exploration efforts in the 2020s, and therefore has implications for the Agency’s Mars plans.

Credit: NASA/OIG
Wanted: more rigorous cost and schedule estimates
To increase the fidelity, accountability, and transparency of NASA’s human exploration goals beyond low Earth orbit, the report recommends the Associate Administrator for Human Exploration and Operations:
(1) complete an integrated master schedule for the SLS, Orion, and GSDO programs for the EM-2 mission;
(2) establish more rigorous cost and schedule estimates for the SLS and associated GSDO infrastructure for EM-2;
(3) establish objectives, need-by dates for key systems, and phase transition mission dates to flesh out its Journey to Mars framework; and
(4) include cost as a factor in NASA’s Journey to Mars feasibility studies when assessing various potential missions and systems.
Resources:
To read the full report — NASA’s Plans for Human Exploration Beyond Low Earth Orbit – go to:
https://oig.nasa.gov/audits/reports/FY17/IG-17-017.pdf
A video detailing the report can be viewed at:

