Archive for the ‘Space News’ Category

Credit: CGTN
China’s Long March-5 Y2 carrier rocket is being readied for a Sunday launch at Wenchang Space Launch Center in south China’s Hainan Province. The process of filling propellant into the booster’s fuel tanks began on Saturday afternoon.
The powerful rocket is to hurl into geosynchronous orbit the Shijian-18 communication satellite, China’s largest spacecraft, for a series of on-orbit tests.
Future plans
This is the second flight of this class of rocket, a central piece of China’s space station and deep space exploration plans. The Long March-5 Y2 is on tap to launch the Chang’e-5 moon probe this November, a robotic sample return mission.
The maiden flight of this booster from Wenchang took place on November 3, 2016.
To view a CCTV-Plus video of launch preparations, go to:

MARINA – a luxury space complex.
Image courtesy of the MARINA team
Admittedly, it’s a mouthful: the Managed, Reconfigurable, In-space Nodal Assembly. Call it MARINA for short.
MARINA is a winning design created by an interdisciplinary team of MIT graduate students representing five departments across the Institute.
Designed as a commercially owned and operated space station, MARINA features a luxury hotel as the primary anchor tenant and NASA as a temporary co-anchor tenant for 10 years.
Future use
The concept won a design contest held by NASA’s Revolutionary Aerospace Systems Concepts-Academic Linkage Design Competition Forum. The challenge involved designing a commercially enabled habitable module for use in low Earth orbit that would be extensible for future use as a Mars transit vehicle. The team’s design won first place in the competition’s graduate division.
MARINA’s key engineering innovations include extensions to the International Docking System Standard (IDSS) interface; modular architecture of the backbone of MARINA’s node modules; and a distribution of subsystem functions throughout the node modules.

Left to right: Caitlin Mueller (faculty advisor), Matthew Moraguez, George Lordos, and Valentina Sumini are some of the members of the interdisciplinary MIT team that won first place in the graduate division of the Revolutionary Aerospace Systems Concepts-Academic Linkage Design Competition Forum.
Photo courtesy of the MARINA team.
Space holidays
“Modularized service racks connect any point on MARINA to any other point via the extended IDSS interface. This enables companies of all sizes to provide products and services in space to other companies, based on terms determined by the open market,” explains MARINA team lead Matthew Moraguez, a graduate student in MIT’s Department of Aeronautics and Astronautics. “Together these decisions provide scalability, reliability, and efficient technology development benefits to MARINA and NASA.”
Valentina Sumini, a postdoc at MIT, adds that MARINA’s flagship anchor tenant, a luxury Earth-facing eight-room space hotel complete with bar, restaurant, and gym, “will make orbital space holidays a reality.”
Other revenue-generating features include rental of serviced berths on external International Docking Adapter ports for customer-owned modules and rental of interior modularized rack space to smaller companies that provide contracted services to station occupants. These secondary activities may involve satellite repair, in-space fabrication, food production, and funded research.

Faster propulsion technology for space travel.
Credit: Ad Astra Rocket Company
NASA is pursuing several in-space propulsion technologies to advance not only human exploration, but also uncrewed spacecraft operations. The hearing will explore NASA’s current portfolio of investments in in-space propulsion technologies, the state of the various technologies, and how they fit into future space architectures.

Credit: Aerojet Rocketdyne

Credit: Diaz/Ad Astra
Hearing: In-Space Propulsion – Strategic Choices and Options
Date: Thursday, June 29, 2017 – 10:00am
Location: 2318 Rayburn House Office Building
Written Testimony:
1)
Mr. William Gerstenmaier, Associate Administrator, Human Exploration and Operations Directorate, NASA
&
Mr. Stephen Jurczyk
Associate Administrator, Space Technology Mission Directorate, NASA
2)
Dr. Mitchell Walker, Chair, Electric Propulsion Technical Committee, American Institute of Aeronautics and Astronautics (AIAA)
3)
Dr. Franklin Chang-Diaz, Founder and CEO, Ad Astra Rocket Company
4)
Mr. Joe Cassady, Executive Director for Space, Washington Operations, Aerojet Rocketdyne
5)
Dr. Anthony Pancotti, Director of Propulsion Research, MSNW LLC
To view the hearing, go to:

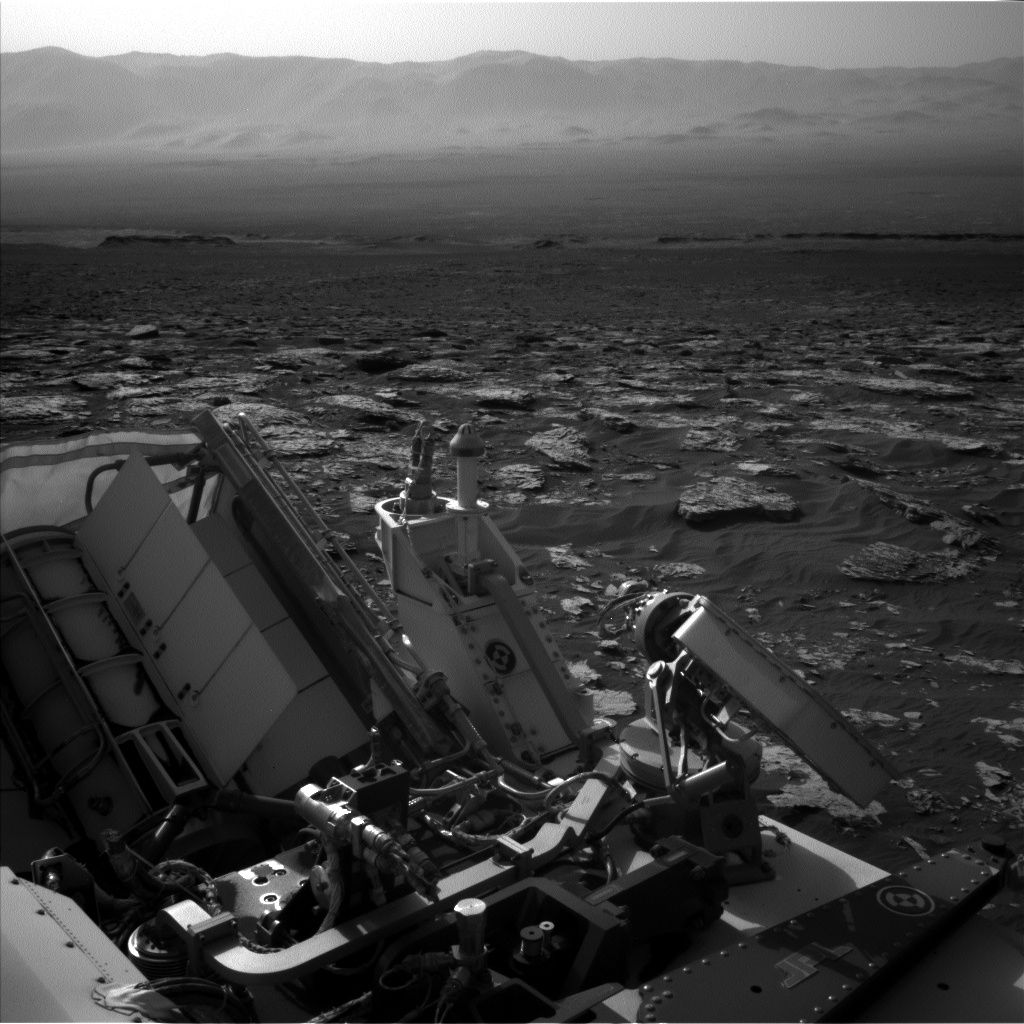
Curiosity Navcam Left B image acquired on Sol 1739, June 28, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on Mars is carrying out Sol 1741 science tasks.
Curiosity recently drove roughly 112 feet (34 meters) to the east to position itself just north of a large field of ripples. The robot is moving closer to ascending the iron oxide-bearing Vera Rubin Ridge.
Gaze ahead
“As Curiosity progresses towards the east, scientists back on Earth continue to look for opportunities to both gaze ahead towards interesting locations on the ridge itself, in addition to looking at the local rocks and sediment surrounding the rover,” reports Mark Salvatore, a planetary geologist from the University of Michigan in Dearborn.

Curiosity Mastcam Left image taken on Sol 1739, June 28, 2017.
Credit: NASA/JPL-Caltech/MSSS
As Curiosity approaches the lower units of Vera Rubin Ridge, measurements of the “typical” rock that surrounds the rover will be vital to helping scientists understand how and why the ridge is different than the other units that have been investigated thus far in Gale Crater.
Probing questions
Salvatore asks: Are we going to observe a very sharp transition in the composition and textures of rocks as we cross the threshold between the underlying mudstones of the Murray formation and the lowermost units of Vera Rubin Ridge? Or, alternatively, are we going to see a very subtle transition that might have gone unnoticed if not for the methodical measurements made upon approaching the ridge?
“Only time will tell, but we are making sure that we have the information necessary to definitively understand the nature of this transition,” Salvatore adds.

Curiosity Front Hazcam Right B image taken on Sol 1739, June 27, 2017.
Credit: NASA/JPL-Caltech
Laser shots
Curiosity’s science plan for the next two days begins with firing the Chemistry and Camera (ChemCam) laser at a bedrock target right in front of Curiosity known as “Cat Sized Island.”
“The rock is almost a meter in length — more of a bobcat size than a standard house cat — and shows some interesting nodular textures that the science team wants to investigate further,” Salvatore explains.
Take to the road
Following this measurement, two different regions of Vera Rubin Ridge itself will be imaged using the ChemCam high-resolution Remote Micro-Imager (RMI). These measurements and observations will be followed up with color images collected by Mastcam for general documentation of the ridge, Cat Sized Island, and the ChemCam target that was automatically analyzed after a previous drive.
Following these measurements, Curiosity will again take to the road and head further east northeast, positioning itself towards the northernmost tip of the nearby sand ripple patch.

Curiosity Mastcam Right image taken on Sol 1739, June 27, 2017.
Credit: NASA/JPL-Caltech/MSSS
Start the climb
In the next few days, the plan is to turn the Mars machinery towards the east southeast around these ripples and towards the ideal location to begin the climb up Vera Rubin Ridge, which is still another 900 feet (roughly 275 meters) distant.
With the Fourth of July holiday early next week, the plan includes activities for three days on the Martian surface.
“Following Curiosity’s drive, she will acquire her standard Navcam imagery surrounding the rover to allow Friday’s science planning team to have a good view of the area accessible to the rover and the instruments,” Salvatore notes.

Curiosity Mastcam Right image taken on Sol 1739, June 27, 2017.
Credit: NASA/JPL-Caltech/MSSS
Local winds
On the plan, the rover’s Mars Hand Lens Imager (MAHLI) is scheduled to image a tray on the rover deck that has been collecting windblown sand to help scientists better understand the properties of these particles and how the local winds are able to move materials.

Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1739, June 27, 2017. This is a dark-toned float rock named Whalesback and targeted with a 10 point ChemCam line scan.
Credit: NASA/JPL-Caltech/LANL
Curiosity is set to image Deimos using its Mastcam instrument.
“The next morning, Curiosity will resume her science activities with a series of ChemCam passive observations of calibration targets on the deck of the rover,” Salvatore explains, “as well as Mastcam imaging of the rover deck to check on the hardware and monitor debris cover.”
Beneath the rover
On the afternoon of the second day, Curiosity is to acquire additional images that have become a familiar and consistent component of the rover’s scientific investigation.
The fixed and immovable Mars Descent Imager, or MARDI, will acquire a suite of images looking just below the rover’s belly. MARDI routinely collects images of the ground immediately beneath the rover to characterize the physical properties of both rocks and sediment as the rover travels through Gale Crater. Because of its consistent viewing geometry and spatial resolution of approximately one millimeter per pixel, MARDI image acquisition has become a routine and integral component to our scientific investigation of the landscapes immediately surrounding the Curiosity rover as it continues to journey up Mt. Sharp.
Clouds in the sky
The third and final day of the observation plan will be dominated by environmental monitoring using both the Navcam and Mastcam instruments.
First, Navcam will acquire several images to hunt for dust devils in Gale Crater. Then, Mastcam will acquire images of the rim of Gale Crater to investigate the amount of dust in the Martian atmosphere.
Lastly, Navcam will point nearly straight up and acquire several images over several minutes to observe any possible clouds in the sky and their movement due to atmospheric winds.
“These observations will be used by scientists to improve our understanding of atmospheric processes on Mars and the specific atmospheric conditions present in Gale Crater,” Salvatore concludes.

Credit: Space for Humanity
Space for Humanity is a just-announced non-profit organization that will select a non-astronaut to travel to the edge of space at the end of 2018.
The organization was launched at NewSpace 2017, being held this week in San Francisco.
As part of the group’s rollout, Space for Humanity is accepting applications for diverse individuals to be granted an all-expenses paid journey on the World View vehicle.

World View’s near-space transportation.
Credit: World View
“Our longer-term vision is to send selected groups into Low Earth Orbit by 2022, the Moon by 2027 and deep space by 2030,” explains Dylan Taylor, the organization’s founder. He is a respected angel investor, thought leader, futurist, and founding partner of Space Angels, a global network of commercial aerospace investors and entrepreneurs.
Democratize space
According to the Space for Humanity website, it has been founded to both democratize space and to increase human awareness to help the world solve its most intractable problems.
“The crews selected for our missions are both diverse and uniquely qualified to share their experiences with their broader communities and the world. We believe that through group experience and a diverse selection process, we can do our small part to help take our species forward into a brighter future,” explains the website.
Credit: Space for Humanity
Current situation
At this week’s NewSpace 2017 gathering, a Space for Humanity talk highlighted some key points:
Current Situation (June 2017)
- 536 people crossed the Karman Line that lies at an altitude of 62 miles (100 kilometers; 330,000 ft) above the Earth’s sea level, and commonly represents the boundary between the Earth’s atmosphere and outer space.
- 533 people to orbit
- 24 have seen the entire Earth
- 12 have walked on the Moon
- 536 people who have been to space: 89% men; 85% westerners
“Our stated mission is to send 10,000 diverse humans to space within the next ten years and so doing change human perception, democratize space, and improve the state of the World,” Taylor adds.

Twelve humans have walked on Earth’s Moon. What’s the future hold?
Credit: NASA
For more information on Space for Humanity, go to:
NOTE: Full disclosure – I am a member of the group’s Strategic Advisors.

Blue Abyss, designed by Robin Partington.
Credit: Blue Abyss
A UK-based deep-sea and space training center is being pursued and will make use of state-of-the-art facilities to reduce risk, improve performance and aid exploration in extreme environments.
Called Blue Abyss, the commercial center would provide state-of-the-art facilities designed to be the world’s most comprehensive deep-sea and space training, research and development center. The facility would house the world’s largest and deepest indoor pool at 164 feet (50 meters) deep and offer roughly 42,000m³ of volume.
Blue Abyss includes a “mission control” style high-definition video room for pool supervision; hyperbaric and hypobaric chambers, and a micro-gravity simulation suspension suite for replicating the effects of weightlessness; plus a research center that focuses on human spaceflight research and its benefits for terrestrial health care. Plans have also blueprinted a conference theater, training rooms and a 120-bed hotel.
Based on-base
To be situated at the Royal Air Force Henlow, Blue Abyss is one element of a larger vision to use the base – due for closure by 2020 – as a science, innovation and technology park. The village of Henlow is in the county of Bedfordshir.
The Blue Abyss team plans to reuse some facilities at RAF Henlow, including a centrifuge base already installed at the site for its long-arm human centrifuge for high-G astronaut training.
Blue Abyss is scheduled to be fully operational by mid-2019.

Blue Abyss, designed by Robin Partington.
Credit: Blue Abyss
UK space industry
Blue Abyss is viewed as contributing to the growth of the UK’s space industry, highlighted by the government in the “Queen’s Speech” issued early this month.
A new Bill has been crafted to make the UK the most attractive place in Europe for commercial space – including launches from British soil.
The Blue Abyss center will also offer a wide range of experiential “space preparation” packages for groups and individuals.
These packages will run alongside a commercial astronaut training program to allow ordinary people to undergo a full astronaut training program ready for the wave of commercial spaceflight opportunities expected to come to market.
“Astronauts and other space professionals will want to come from around the world to use the massive, yet controlled, environment to reduce risk in space. I can see plenty of international collaborations and business ventures starting life within Blue Abyss,” says Helen Sharman, the first British astronaut.
For more information on Blue Abyss, go to:

Mastcam Left image of ridge, taken on Sol 1732, Jume 20, 2017.
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 1739, NASA’s Curiosity Mars rover presses onward to Vera Rubin Ridge reports Abigail Fraeman, a planetary geologist at NASA/JPL in Pasadena, California.
This past weekend, Curiosity continued to journey east along the contact between the lower portion of Vera Rubin Ridge and the Murray formation with a drive that was a little over 65 feet (20 meters) long.
Two sols of planning — Sol 1739 and Sol 1740 — are in the works.

Mastcam Left photo taken on Sol 1737, June 25, 2017.
Credit: NASA/JPL-Caltech/MSSS
Continuing quest
On the first sol, the robot’s Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) are slated to make observations of a target named “Rice Point,” Fraeman notes, “in our continuing quest to characterize the variability of typical Murray bedrock as we ascend Mt. Sharp.”
Also in the planning are remote sensing observations to document changes in texture and chemistry of the rocks in front of Curiosity, as well as some nearby sand.

Mastcam Left photo taken on Sol 1737, June 25, 2017.
Credit: NASA/JPL-Caltech/MSSS
Color documentation
Curiosity’s Chemistry and Camera (ChemCam) laser-induced breakdown spectroscopy (LIBS) observations are to be made of targets named “Hamilton Pond,” “Whalesback,” and Rice Point. Associated Mastcam images will provide color documentation of the ChemCam targets, as well as Mastcam observations of “Fosters Brook” and “Skillings River.”
“After our morning science block will we continue on our way east towards the location where we can ascend Vera Rubin Ridge,” Fraeman adds.

Curiosity Front Hazcam Left B image taken on Sol 1737, June 25, 2017.
Credit: NASA/JPL-Caltech
Post drive, the rover will take a ChemCam AEGIS (Autonomous Exploration for Gathering Increased Science) observation and a special stowed MAHLI observation looking back towards Aeolis Palus to document the landscape Curiosity has traversed across.
Spectacular views
On the second sol of the plan, Navcam observations will characterize properties of the atmosphere and to search for dust devils.
“All of the data from our second imaging stop back on Sol 1734 finished coming down over the weekend,” Fraeman points out, “and they continue to show spectacular views of vertical bedrock exposures.”
Those images are being analyzed to understand the nature of the geologic contact between Vera Rubin Ridge and the Murray formation, as well as the environments that deposited the layers that make up the lower ridge.

Navcam Right B image taken on Sol 1737, June 25, 2017.
Credit: NASA/JPL-Caltech
Imaging campaign
“We have been utilizing several of Curiosity’s cameras to help with this imaging campaign. We took untargeted, post-drive Mastcam left eye images the sol before the main imaging sol to get a good context and to help us refine pointing for the Mastcam right eye images, which have higher spatial resolution but smaller fields of view,” Fraeman notes.
“We also took pictures of select sections of the area with the ChemCam Remote Micro-Imager (RMI) that have even higher spatial resolution than the Mastcam right images, but which are black and white only. The science team will use all of these data to perform our analyses,” Fraeman concludes.

Second flight of China’s Long March-5 set for early July.
Credit: CGTN
China is readying the next launch of its Long March-5 booster, aiming for a liftoff in early July.
This is the second launch of the powerful booster – and is also the rocket required for China’s Moon return sample mission slated for late November of this year. The Long March-5 is also essential to lift space station modules and deep space probes.
Launch window
According to the State Administration of Science, Technology and Industry for National Defense, the launch window has been set for the July 2-5 time period.
China’s Xinhua news agency reports that the carrier rocket has been vertically transported to the launch zone at Wenchang Space Launch Center.
The upcoming Long March-5 Y2 is carrying Shijian-18 communication satellite. It will test processes for the new Dongfanghong-5 satellites and carry out a set of in-orbit experiments.
The booster arrived at the sprawling launch base on May 5 and has undergone assembly and checkout.

Wenchang launch site.
Credit: CCTV
Booster capacity
Fuelled by liquid hydrogen, kerosene and liquid oxygen, the Long March-5 can haul payloads of 25 tons into low Earth orbit and 14 tons into geostationary orbit. That capability is over 2.5 times the capacity of current Long March carrier rockets.
The Long March-5’s maiden flight was also from Wenchang in November 2016.
During the upcoming flight, the Long March-5 Y2 is slated to further test its core technology and accumulate data useful for the launch of the Chang’e-5 sample return mission scheduled for the second half of this year.

Credit: Iridium/SpaceX
Team Vandenberg in California is scheduled to launch the Iridium NEXT satellite on a SpaceX Falcon 9 rocket from Space Launch Complex-4 today, Sunday, June 25, at 1:25 p.m. PDT.
A backup launch opportunity opens at 1:19 p.m. PDT, or 20:19 UTC, on Monday, June 26.
Following stage separation, the first stage of Falcon 9 will attempt a landing on the “Just Read the Instructions” droneship that will be stationed in the Pacific Ocean.

Credit: SpaceX
On Friday, SpaceX successfully rocketed into orbit a Bulgarian communications satellite from NASA’s Kennedy Space Center in Florida. If all goes well, the back-to-back, bi-coastal launches (and landings of the Falcon 9’s first stage) would be a private-sector milestone and constitute a “weekend doubleheader.”
Network replacement
This is the second of eight planned Iridium NEXT launches. Each launch will contribute to replacing the company’s commercial satellite network. This launch will deliver the second payload of 10 Iridium NEXT satellites to orbit, bringing the total to 20 Iridium NEXT satellites in space.

Credit: Iridium
Iridium NEXT is replacing the Company’s existing constellation of satellites with more powerful capabilities, including Aireon’s space-based global real-time aircraft surveillance and tracking service.
Series of launches
Iridium has partnered with SpaceX for a series of eight launches scheduled to take place through mid-2018, delivering a total of 75 satellites to low-Earth orbit.
Iridium NEXT is the company’s $3 billion next-generation mobile, global satellite network scheduled for completion in 2018.
Flight safety system
This will be the first launch for Col. Michael S. Hough, 30th Space Wing commander, who took command on June 9th.
“As a side, this will also be our first launch with the Autonomous Flight Safety System, which is expected to help decrease launch costs and improve turnaround times between launches,” Hough said in an Air Force statement.
The Autonomous Flight Safety System debuted on its maiden flight from Kennedy Space Center on a Falcon 9 rocket earlier this year, leveraging software developed at the 30th Space Wing.
Live feed
A live feed of the launch will be available starting twenty minutes prior to launch at: www.spacex.com/webcast
Curiosity Navcam Left B image taken on Sol 1734, June 22, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is busy carrying out Sol 1736 duties.
Following a drive of a little over 54 feet (16.6 meters), “Curiosity has presented us with another beautiful workspace,” report Michael Battalio, an atmospheric scientist at Texas A&M University in College Station and Mark Salvatore, a planetary Geologist from the University of Michigan in Dearborn.
The majority of last week’s rover activities were focused on imaging Vera Rubin Ridge to observe its stratigraphic and structural relationship to the underlying Murray formation.

Curiosity Navcam Left B image taken on Sol 1734, June 22, 2017.
Credit: NASA/JPL-Caltech
Weekend plan
The weekend plan has the robot taking “a bit of a deviation from that, as we will be making numerous measurements of the local Murray formation,” Battalio and Salvatore note.
These “local” observations will be extremely valuable over the coming weeks, as Curiosity potentially transitions between two different geologic units: the Murray formation and Vera Rubin Ridge.
“The nature of this transition will hold important clues into the origin of the ridge and the evolution of Gale Crater as a whole,” Battalio and Salvatore explain.

Curiosity Front Hazcam Left B image acquired on Sol 1735, June 23, 2017.
Credit: NASA/JPL-Caltech
New targets
Curiosity’s upcoming tasks include first using its Chemistry & Camera (ChemCam) to probe the composition of three rocky targets, followed by acquiring high-resolution Mastcam images to document the targets.
The first target, known as “Winter Harbor,” is situated in front of the rover and is a benign, flat, and finely layered piece of the Murray formation.
Next, ChemCam will target “Beaver Dam Pond,” that appears to be a block of the Murray formation that may have been tilted on its side.
Fractured block
The plan next calls for Curiosity to point her mast just off her back right wheel where ChemCam will investigate “Kitteredge Brook” – a more plate-like and fractured block that appears to have a vein running through it.
Lastly, Mastcam will image one additional block of typical layered rock of the Murray formation known as “Crippens Brook.” The exposed layering of this target will help determine whether this section of the Murray formation is similar or different than previously analyzed locations, Battalio and Salvatore report.
After these remote observations, Curiosity will untuck her arm and engage in contact science with the Winter Harbor target. First, the rover’s Dust Removal Tool will be used to brush away any surface dust.

Curiosity ChemCam Remote Micro-Imager photo taken on Sol 1733, June 21, 2017.
Credit: NASA/JPL-Caltech/LANL
Clues into chemistry
Curiosity is slated to then deploy the Alpha Particle X-Ray Spectrometer (APXS) to the target. That device uses the decay of the radioactive element curium to generate alpha particles and X-rays that interact with the surface material. The energy recorded coming from the surface material as a result of these interactions holds important clues into the chemistry of the surface materials.
Curiosity will leave the APXS instrument in contact with Winter Harbor overnight to integrate its signal and to derive a precise measurement of the material’s composition.
The next sol, Curiosity is scheduled to investigate the chemistry of one more target called “Blunts Point,” a wavy and fractured block. Making use of ChemCam, the robot will take two contextual Mastcam images of this target, and take an additional three Mastcam images of a separate block slightly closer to the rover known as “Blunts Pond.” That feature appears similar in texture to Blunts Point. Mastcam will then acquire a full multispectral image of Winter Harbor before departing this location to the east.

Curiosity Mastcam Right image acquired on Sol 1734, June 22, 2017.
Credit: NASA/JPL-Caltech/MSSS
Environmental observations
Curiosity is also slated to take multiple environmental observations in the plan.
Battalio and Salvatore also note that on Sol 1738, a morning imaging suite will be taken, which will include two Navcam cloud movies – a zenith movie looking directly above the rover and a supra-horizon movie looking towards the rim of Gale Crater.
Mastcam will make measurements to assess the amount of dust in the atmosphere.
Later on Sol 1738, Mastcam will repeat those measurements twice to determine diurnal variability in the atmospheric opacity.
The plan will also include Mars Hand Lens Imager (MAHLI) imaging of the Rover Environmental Monitoring Station (REMS) ultraviolet (UV) sensor to determine the amount of dust on the UV photodiodes, which is done approximately every 60 sols. REMS and Dynamic Albedo of Neutrons (DAN) measurements will be taken according to the usual cadence.

Previous Phobos eclipse ingress on Sol 964, acquired by Curiosity’s Mastcam Right back on April 23, 2015.
Credit: NASA/JPL-Caltech/MSSS
Phobos and Deimos imagery
Curiosity is scheduled to become once again a roving astronomer in the scripted plan.
The robot’s Mastcam is slated to take images of both of Mars’s moons, Phobos and Deimos.
“Deimos imaging will assist in more accurately defining the moon’s orbit, so is not constrained in timing during the night. The imaging of Phobos will capture its ingress into the shadow of Mars – a Martian lunar eclipse,” Battalio and Salvatore explain.
“This specific astronomical event occurs repeatedly at this time of year, but the timing of the imaging must be exact. Imaging before the eclipse begins and during the ingress allows for an estimation of the size and amount of dust in the upper atmosphere of Mars. This is possible because as eclipse begins, the light that is reflected off of Phobos must skim through the top of Mars’s atmosphere first,” Battalio and Salvatore point out. “This light can then be compared to imaging before eclipse begins. Repeating the Phobos observation at different times of year allows for probing of the atmosphere over different locations and at different altitudes due to the relative geometry changing.”

Credit: NASA/JPL-Caltech/University of Arizona
Road map
A new Curiosity traverse map through Sol 1734 has been issued by the Jet Propulsion Laboratory.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1734 Martian day, or sol, of the rover’s mission on Mars (June 23, 2017).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1732 to Sol 1734, Curiosity had driven a straight line distance of about 53.30 feet (16.25 meters), bringing the rover’s total odometry for the mission to 10.44 miles (16.81 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

