Archive for the ‘Space News’ Category

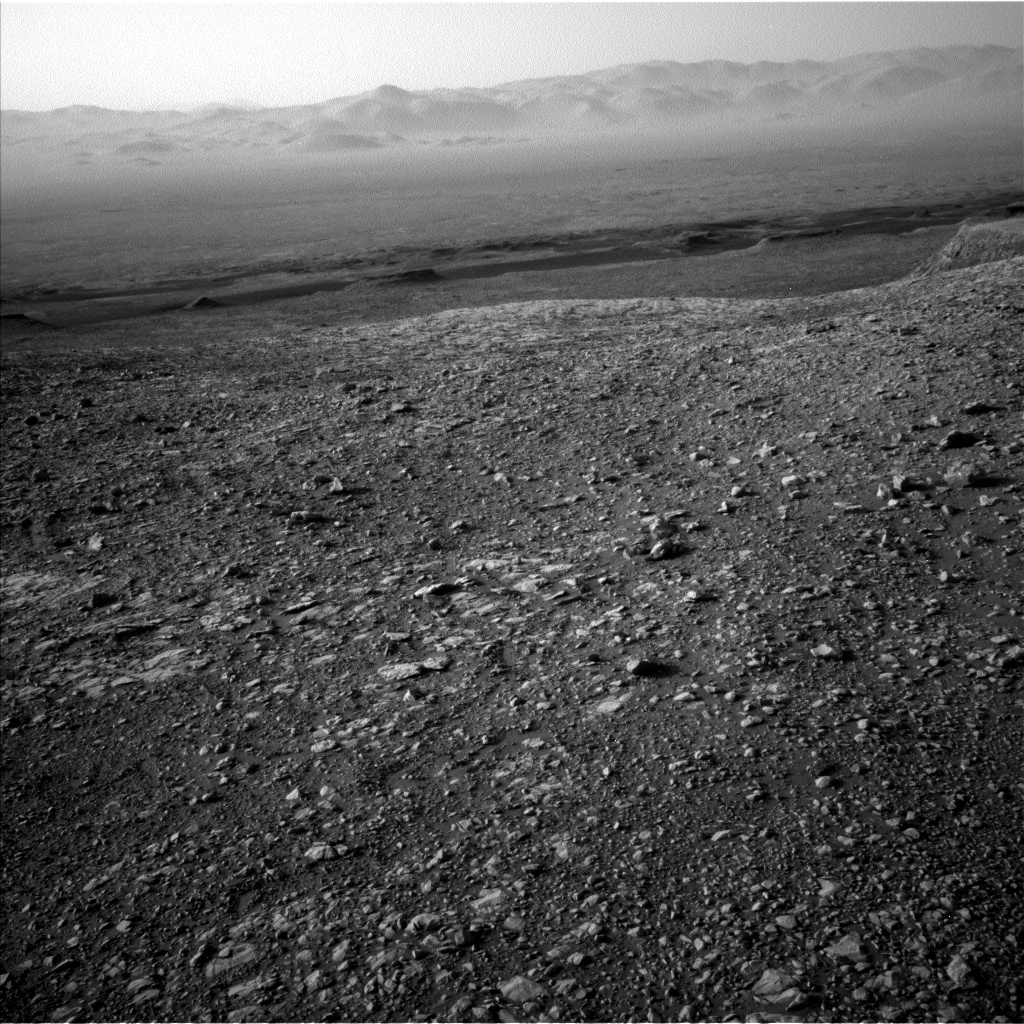
Curiosity Front Hazcam Right B image taken on Sol 2027, April 15, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover in carrying out Sol 2028 science duties.
Reports Scott Guzewich, an atmospheric scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland: “This was a week of transition for Curiosity’s environmental science team. The cloudy season on Mars has ended as we’ve seen a marked decrease in water ice cloud activity in our Navcam sky movies over the last several weeks and we’re moving quickly into the dusty season on Mars.”

Curiosity Navcam Left B photo acquired on Sol 2027, April 19, 2018.
Credit: NASA/JPL-Caltech
Guzewich adds that the Mars science team will now be drastically reducing the frequency in which they search for clouds and instead focus their attention on dust devils and storms.
Dustier atmosphere
“The atmosphere is beginning to get dustier, as seen by the hazy look of the northern rim in Gale Crater,” Guzewich adds. “Indeed, we began preplanning our annual campaign to study a potential global dust storm, if and when such a storm develops this year. The dusty season on Mars, roughly the second half of the martian year, runs from the end of May until February next year, and we’ll be monitoring closely for the signs that a global dust storm (the last of which occurred way back in 2008!) is developing,” he points out.
Curiosity Navcam Left B image taken on Sol 2027, April 19, 2018.
Credit: NASA/JPL-Caltech
Southern spring equinox
On Mars, routine business continued as the science team performed a “touch-and-go” plan with Mars Hand Lens Imager (MAHLI) images of rock targets “Hawick”, “Kemnay”, and “Buchan”, before driving toward the robot’s next destination.
The plan calls for Curiosity to take two movies to look for dust devils and two more Mastcam image sequences to monitor the (increasing) amount of dust in the atmosphere as the rover moves toward southern spring equinox, Guzewich concludes.
New map
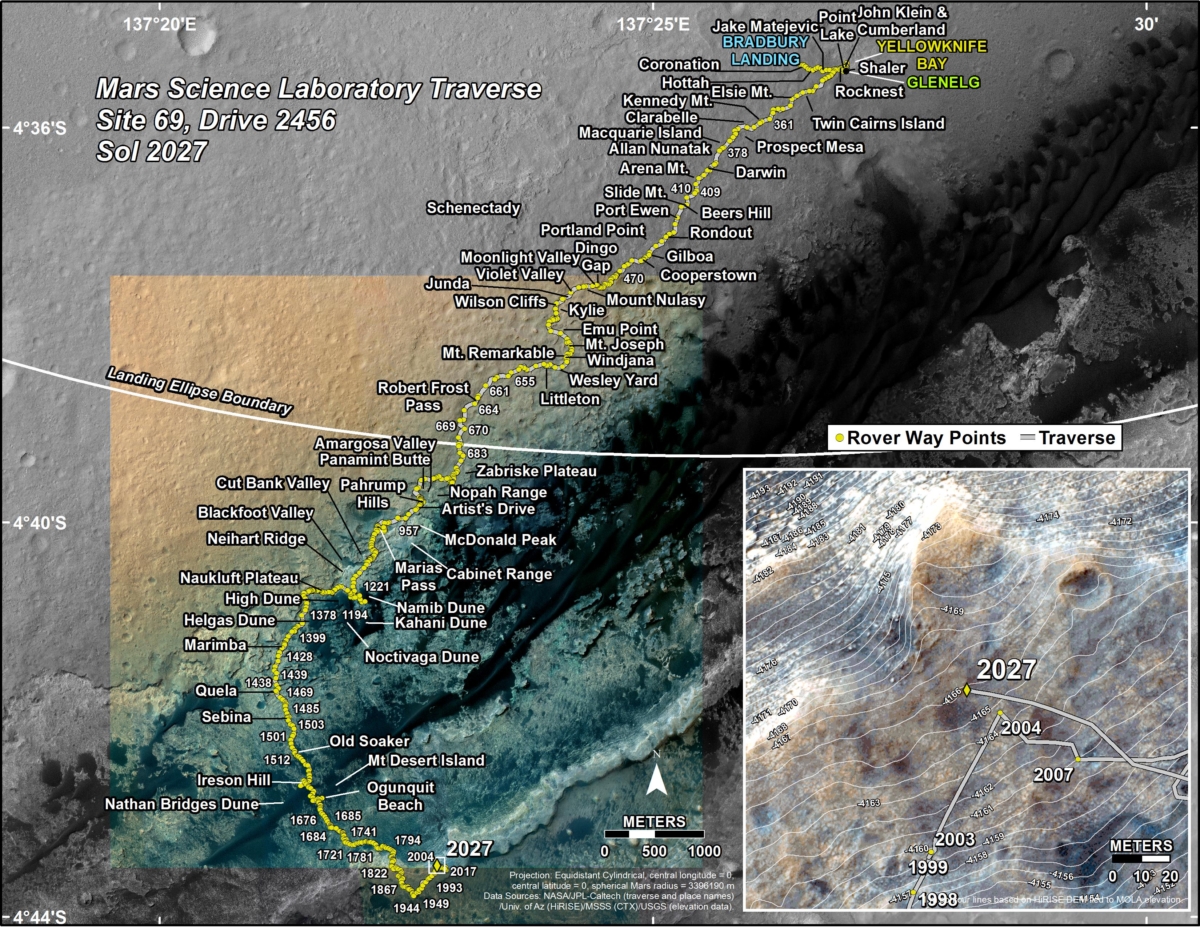
Credit: NASA/JPL-Caltech/Univ. of Arizona
A new Curiosity traverse map shows the rover’s whereabouts through Sol 2027.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2027 Martian day, or sol, of the rover’s mission on Mars (April 20, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2023 to Sol 2027, Curiosity had driven a straight line distance of about 279.70 feet (85.25 meters), bringing the rover’s total odometry for the mission to 11.68 miles (18.79 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Earth-Moon L2 relay link.
Credit: CNSA
China is set to announce the name for its relay satellite associated with the country’s far side lander – Chang’e-4.
According to the China state news agency, Xinhua, together with the relay satellite, two microsatellites, developed by the Harbin Institute of Technology, will also be sent into orbit to conduct scientific research. The names of the two microsatellites will also be announced on April 24.
China’s Space Day on April 24 marks the day the country’s first satellite was sent into space in 1970.
Target: Aitken Basin
The Moon’s far side is the target for the Chang’e-4 lander/rover spacecraft. However, landing and roving on the far side, not visible from Earth, requires a relay satellite to transmit signals to the landed hardware.

Chang’e-4 Moon lander and rover.
The Xinhua news story notes that China plans to send the relay satellite to the halo orbit of the Earth-Moon Lagrange Point L2 in late May or early June 2018. The Chang’e-4 lunar lander and rover is to touch down within the Aitken Basin of the south pole region of the Moon about half a year later.

Dana Vaisler of StemRad wearing AstroRad vest prototype in front of Orion Capsule at Johnson Space Center. Note vest contours which correspond to enhanced protection around sensitive organs – bone marrow, colon, stomach, ovaries and breast tissue. Credit: StemRad.
NASA and the Israel Space Agency have signed an agreement for use of the AstroRad radiation protection vest on NASA’s Exploration Mission-1 flight.
AstroRad is the second product developed by StemRad, following the success of its first product, called StemRad 360 Gamma – the world’s first wearable shield that provides meaningful protection from harmful gamma radiation.
StemRad collaborated with NASA’s prime contractor for the Orion spacecraft, Lockheed Martin, to adapt its technology for use in space. StemRad is an Israeli-American company headquartered in Tel Aviv, Israel.
When venturing into lengthy, piloted deep space missions, the threat of radiation exposure is significantly higher, posing as one of the most significant dangers facing crew members.

An artist rendering of the Matroshka Radiation Phantoms – one protected with the AstroRad vest and one unprotected. Credit: StemRad
Trial test
Called the “Matroshka AstroRad Radiation Experiment”, or MARE for short, an EM-1 test will be comprised of two Matroshka test dummies – one naked and one wearing AstroRad. The Matroshkas, containing thousands of radiation detectors, will be supplied by the German Aerospace Center.
While EM-1 will not likely encounter a solar storm, the mission will pass through the Van Allen radiation belt – a zone of energetic charged particles that emanate from solar winds – providing an opportunity to test AstroRad in conditions similar to those found during a solar storm.
Ergonomically correct
When passing through the belt, the radiation sensors on the dummies will be on and will record readings during the passage. Should the trial be successful, AstroRad will be used on crewed missions to deep space.
Additionally, AstroRad is expected to be used aboard the International Space Station beginning in 2019 for advanced ergonomic studies in microgravity.
For more information on StemRad, go to:
Credit: CSIS
Aerospace Industries Association (AIA) sponsored Center for Strategic and International Studies (CSIS) Aerospace Security Project’s “Space Threat Assessment 2018” which aggregates the open-source information on counterspace capabilities for policymakers and the general public.
Go to:
https://aerospace.csis.org/wp-content/uploads/2018/04/Harrison_SpaceThreatAssessment_FULL_WEB.pdf
Credit: AIA
Also, AIA is launching “SKYFAIL: What Happens When America’s Satellites Go Down” highlighting American dependence on space capabilities and possible impacts of losing satellite connectivity.
Go to:
https://www.aia-aerospace.org/skyfail-americas-satellites-suddenly-go-down/

Curiosity Navcam Left B image taken on Sol 2023, April 15, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover is now performing Sol 2024 science duties.
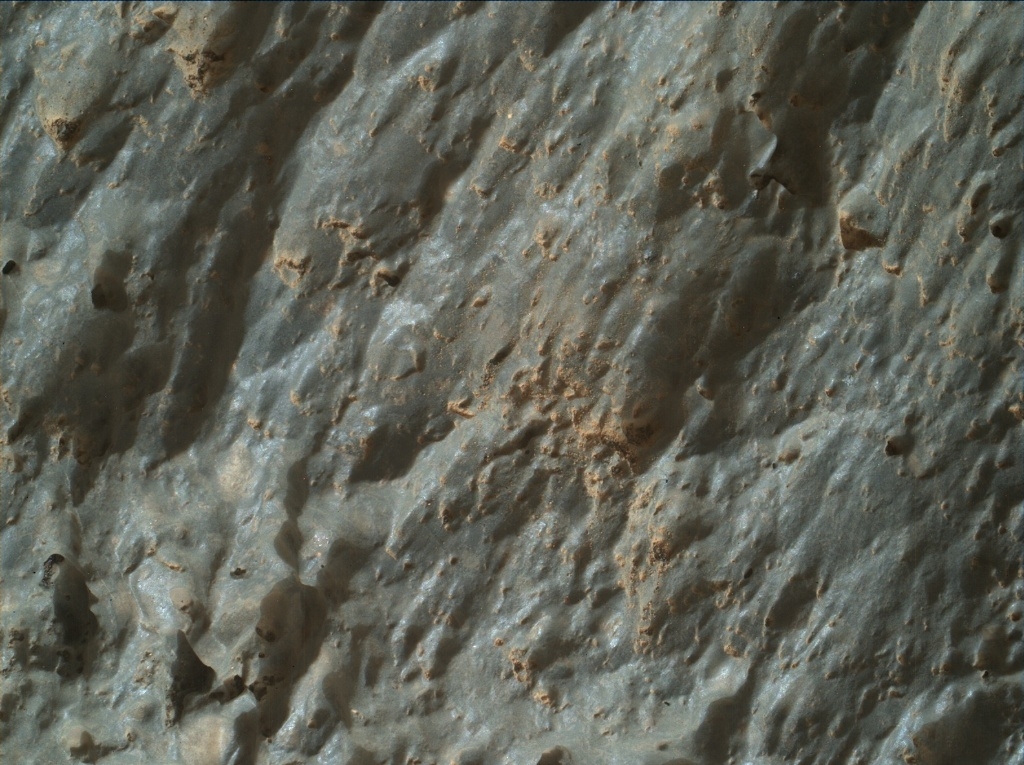
Ken Herkenhoff, a planetary geologist; at the USGS in Flagstaff, Arizona reports that the rover completed a Sol 2020 drive, “placing the vehicle in a good position for contact science on the ‘Waternish’ conglomerate.”
Curiosity Navcam Left B image taken on Sol 2023, April 15, 2018.
Credit: NASA/JPL-Caltech
To sample the diversity of clasts in Waternish, the Sol 2022 plan included brushing two spots, a 5-point Alpha Particle X-Ray Spectrometer (APXS) raster, and lots of Mars Hand Lens Imager (MAHLI) imaging. But first on tap was use of the rover’s Chemistry and Camera (ChemCam) to laser shoot Waternish and the cobble behind it, named “Arrochar.”
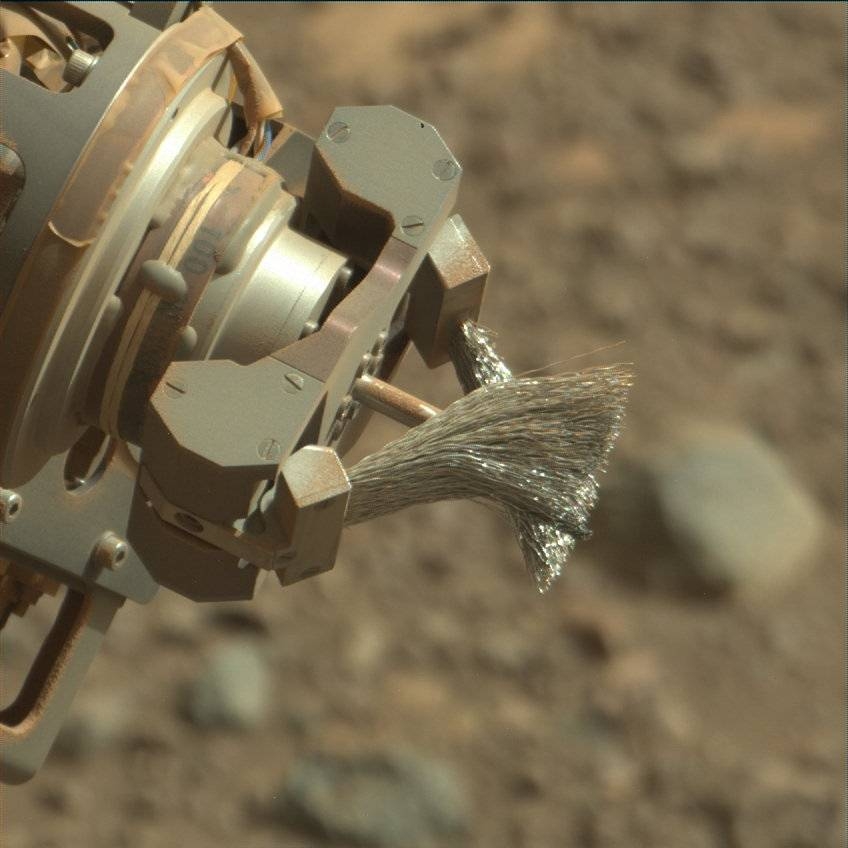
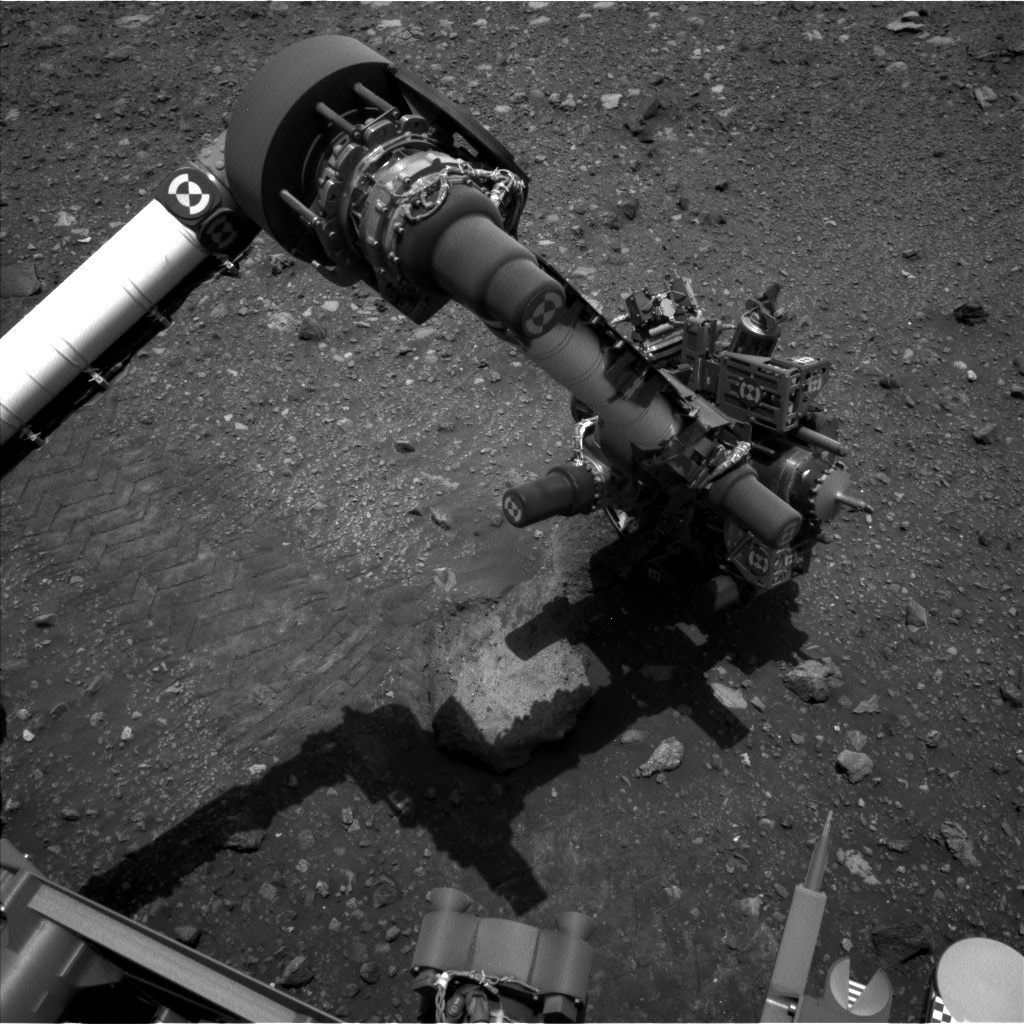
Curiosity Mastcam Right image of rover brushes, taken on Sol 2022, April 14, 2018.
Credit: NASA/JPL-Caltech/MSSS
Complex arm activities
After Curiosity’s Dust Removal Tool (DRT) is finished brushing, MAHLI will acquire full suites of images of one of the brushed spots and of Arrochar, as well as a mosaic of images from 5 centimeters above the APXS raster spots and context images from 25 centimeters.
“Then APXS will go to work on Waternish, followed by placement on Arrochar for an overnight integration. This complex set of arm activities took longer than usual to plan, but should provide a rich dataset,” Herkenhoff notes.
Sandy ripple
Curiosity Front Hazcam Right B photo acquired on Sol 2023, April 15, 2018.
Credit: NASA/JPL-Caltech
On Sol 2023, the plan called for the rover’s Mastcam to take a full multispectral set of images of Waternish and a 3×3 mosaic of both Waternish and Arrochar.
ChemCam was to observe two more spots on Waternish, and the Right Mastcam will take an image of the ChemCam target selected by the robot’s exploration software on Sol 2021.
“Then the rover will drive backwards to a nearby sandy ripple, un-stow its arm, and acquire the images needed to plan close-up observations of the ripple. Overnight, APXS will again measure the amount of argon in the atmosphere,” Herkenhoff explains.
Dust and dust devils
On Sol 2024, the plan has the robot’s ChemCam gathering calibration data. Mastcam will measure the opacity of dust in the atmosphere, and Navcam will search for dust devils.
Curiosity Mars Hand Lens Imager (MAHLI) image produced on Sol 2023, April 15, 2018.
Credit: NASA/JPL-Caltech/MSSS
Lastly, APXS will perform a short thermal test and Curiosity’s Mars Descent Imager (MARDI) is to take another twilight image, Herkenhoff concludes. “Another busy weekend for our intrepid explorer!”
Traverse map
A recently released Curiosity traverse map through Sol 2020 shows the route driven by NASA’s Mars rover Curiosity through the 2020 Martian day, or sol, of the rover’s mission on Mars (April 13, 2018).
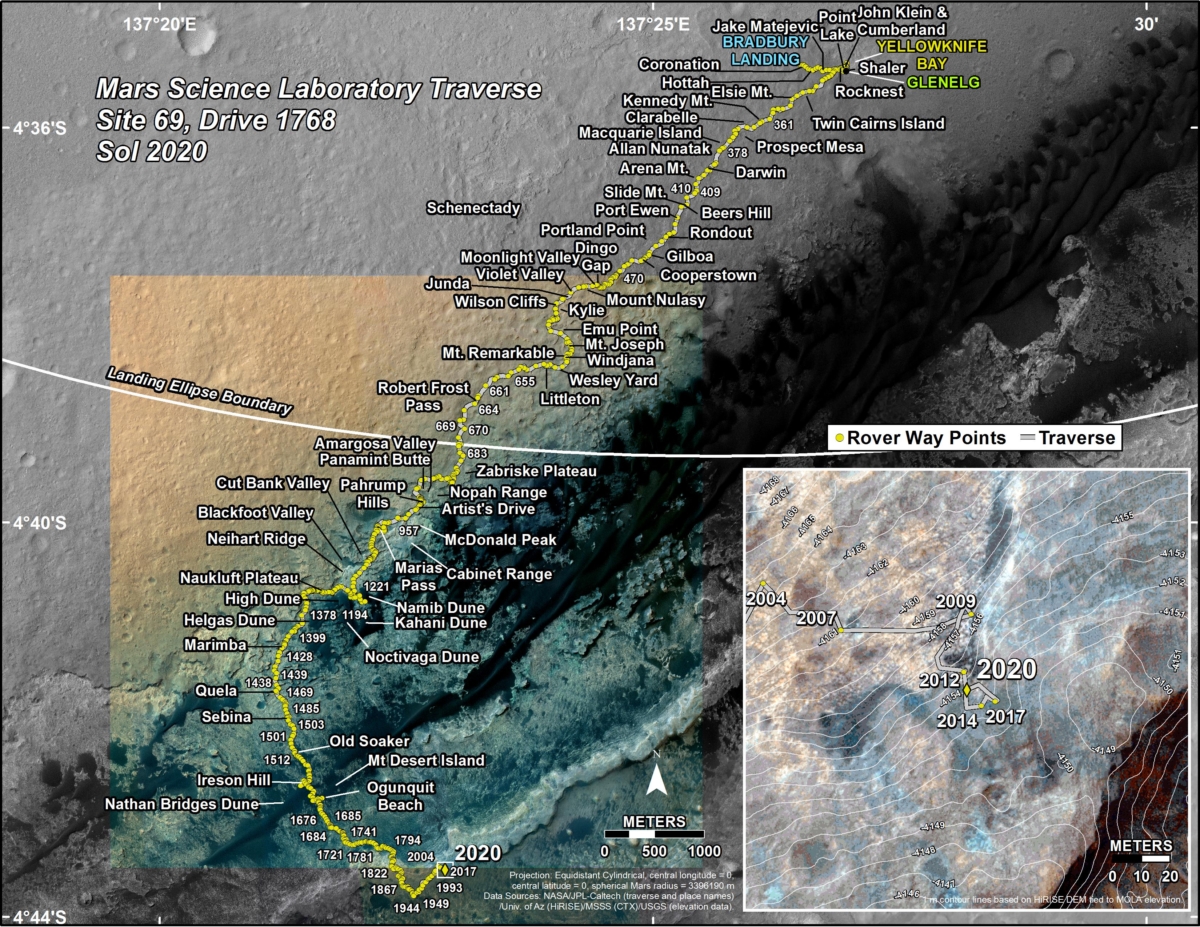
Credit: NASA/JPL-Caltech/Univ. of Arizona
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2017 to Sol 2020, Curiosity had driven a straight line distance of about 34.85 feet (10.62 meters), bringing the rover’s total odometry for the mission to 11.61 miles (18.69 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Artistic view of VividX2 in Earth orbit.
Credit: Earth-i
Earth-i has released its first full-color video of Earth taken from space by its commercial satellite — VividX2 — launched in January.
The VividX2 makes use of an Ultra High Definition camera that captures high-resolution images for any location on Earth – and also films up to two minutes of video at a time as it passes over each target location.
The just released clips show videos of numerous different locations across the globe, and some of the intriguing new insights that can be quickly derived from the video.

Credit: Earth-i
Commercial color
In a company statement Richard Blain, CEO of Earth-i, explains: “Commercial color video from space represents a major breakthrough for our industry and a world first. This initial footage shows what is now possible – with more videos being acquired every day. The depth and quality of data we can now acquire takes Earth Observation-based big data analytics to a new level. The way we capture video allows for a broader range of contextual insights to be derived than is possible with traditional still imagery.”
VividX2 weighs all of 220 pounds (100 kilograms) and measures roughly 1 cubic meter.

Scene from video.
Credit: Earth-i
4th dimension: motion and time
Earth-i’s range of capabilities include
o The provision of high definition images and color video with resolutions better than one meter for any location on Earth.
o The ability to capture and analyze moving objects such as vehicles, vessels and aircraft in Ultra High Definition color video.
o Revisiting the same location multiple times per day with agile satellites that can be pointed to image specific areas of interest and acquire high-frame rate imagery.

Credit: Earth-i
o Rapid tasking of satellites to take images or video, and fast data download within minutes of acquisition. Delivering additional contextual depth of information from motion and time – the 4th dimension.
Resources
The current VividX2 mission is the product of a collaboration between Earth-i, the Ministry of Defense, Defense Science and Technology Laboratories (DSTL) and Surrey Satellite Technology Ltd (SSTL), all of the UK.
Take a look at this impressive video at:
Also, go to Earth-i’s website:

Credit: Boeing
The word from a global network of satellite watchers is that the secretive Air Force X-37B space plane on its Orbital Test Vehicle-5 (OTV-5) mission has been spotted.
OTV-5 ‘s flight began September 7, 2017, when the robotic spacecraft launched atop a SpaceX Falcon 9 booster from NASA’s Kennedy Space Center in Florida.
Chance sighting
Skywatcher Cees Bassa from The Netherlands reported a chance sighting of a bright satellite of unknown identity, observed early on April 11. He estimated a circular orbit of about 54.5 deg inclination and 220 miles (355 kilometers) altitude.
Bassa alerted the satellite observing network and others that this could be OTV-5.
The object seen had been observed last October by another satellite spotter, Russell Eberst in Edinburgh, United Kingdom, who had reported a satellite of similar brightness and similar orbit.

Credit: Boeing/screengrab
Close correlation
“I produced rough search elements, that proved too rough to recover the object,” said Ted Molczan, a Toronto-based satellite analyst. “I found, with very slight tweaks, the preliminary orbit that Cees had posted could be made to fit both his and Russell’s observations,” he told Inside Outer Space.
Bassa noted the close correlation of the orbit with the launch of OTV-5.
Meanwhile, another satellite tracker, Marco Langbroek, also in The Netherlands, made note that the U.S. Air Force had earlier announced that the inclination of OTV-5 would be the highest of the series to-date.
“The fifth OTV mission will also be launched into, and landed from, a higher inclination orbit than prior missions to further expand the X-37B’s orbital envelope,” explained the Air Force in a pre-launch statement.
This orbit also passes very close, within 2 degrees longitude from Cape Canaveral, at the time of the OTV-5 launch. “Looks like a pretty probable identification,” Langbroek reports.
Ground track
“Cees recovered the object, which can now be identified beyond reasonable doubt as OTV-5,” Molczan said. “As Cees cautions, further tracking may reveal a bit more eccentric orbit, but the mean altitude is about 355 kilometers, and the inclination is close to 54.5 degrees.”
“I estimate that the ground track nearly repeats at intervals of about 31 revolutions, or about two days,” Molczan explains. “Similar behavior has been seen during portions of all previous OTV missions. If it carries an imaging payload, then the orbit affords frequent revisit of targets, but it could serve some other operational purpose that I cannot guess.”

The U.S. Air Force’s X-37B Orbital Test Vehicle 4 is seen after landing at NASA ‘s Kennedy Space Center Shuttle Landing Facility in Florida on May 7, 2017.
Credit: U.S. Air Force courtesy photo
Rapid space access
When OTV-5 will return to Earth is anybody’s guess. The X-37B program completed its fourth mission on May 7, 2017, landing after 718 days in orbit and extending the program’s total number of days spent in orbit to 2,085.
The Air Force Rapid Capabilities Office is running the X-37B Orbital Test Vehicle program.
“The fifth OTV mission continues to advance the X-37B’s performance and flexibility as a space technology demonstrator and host platform for experimental payloads,” explained the Air Force in its pre-launch statement. “This mission carries small satellite ride shares and will demonstrate greater opportunities for rapid space access and on-orbit testing of emerging space technologies.”

The X-37B Orbital Test Vehicle mission 4 (OTV-4), the Air Force’s robotic reusable space plane landed at the NASA Kennedy Space Center Shuttle Landing Facility May 7, 2017.
Credit: USAF
Many firsts
The current mission is hosting the Air Force Research Laboratory Advanced Structurally Embedded Thermal Spreader payload to test experimental electronics and oscillating heat pipe technologies in the long duration space environment.
“The many firsts on this mission make the upcoming OTV launch a milestone for the program,” said Randy Walden, the director of the Air Force Rapid Capabilities Office. “It is our goal to continue advancing the X-37B OTV so it can more fully support the growing space community,” prior to the space plane’s liftoff.
For more details on this current mission, go to my earlier Space.com story:
Secretive X-37B Military Space Plane Wings Past 200 Days in Orbit
April 6, 2018 05:17pm ET
https://www.space.com/40227-x-37b-space-plane-200-days-in-orbit-otv5.html
Also, Boeing, the maker of the robotic Air Force X-37B space plane, issued this video as prelude to the program’s Orbital Test Vehicle (OTV-5) mission.
Go to:
https://www.youtube.com/watch?v=u-7VNf7DCY8

Credit: EDF/TED Talks
The Environmental Defense Fund is eyeing its own satellite – MethaneSAT — to collect data from around the world about methane pollution and make it publicly available. Doing so would allow companies, governments, investors, and concerned citizens to target pollution control efforts where they’re most needed.
According to the EDF, cutting methane emissions is the fastest, cheapest thing that can be done to slow the rate of warming today, even as we continue to attack carbon dioxide emissions.
A 45% reduction in methane emissions from the oil and gas sector by 2025 would deliver the same 20-year climate benefit as closing one-third of the world’s coal-fired power plants, notes the EDF.
Single-purpose platform
“Our new MethaneSAT will help empower this generation of environmental advocates by providing global high-resolution coverage of methane emissions,” according to EDF. “As a single-purpose platform, it will be quicker and less expensive to launch than the complex multifunction satellites built by government space agencies, so we can get data sooner.”
To make MethaneSAT turn into reality, Tom Ingersoll, a leading satellite entrepreneur with three decades of experience, has been hired to manage the project. Also, they have partnered with Harvard University and the Smithsonian Astrophysical Observatory to get the science right.

MethaneSAT, shown in an artist’s rendering, aims to use new technology to map and measure human-made emissions globally, to help reduce methane pollution.
Credit: EDF
Why focus on methane?
Methane is a potent greenhouse gas. Human-made methane emissions account for a quarter of today’s global warming. Also, one of the leading sources of those emissions is the oil and gas industry.
To fully understand the problem – and drive the solutions – more and better data is required about: How large methane emissions are; Where they’re coming from; The biggest potential reductions; Progress of those reductions over time.
MethaneSAT will provide global high-resolution coverage, exceeding anything in orbit or on the drawing board today.
EDF President Fred Krupp announced this new initiative in a recent TED Talk that can be viewed here:

Reps. Ami Bera (D-Calif.), Randy Hultgren (R-Ill.) and Mary Lynne Dittmar, president and CEO, Coalition for Deep Space Exploration, speak during the POLITICO Space Launch Event.
Credit: POLITICO
Last year, President Donald Trump signed an executive order reviving the National Space Council to help fuel a new space economy and harness government and private investments to return humans to the moon and on to Mars.
POLITICO staged on April 12 a deep-dive conversation about what the National Space Council has accomplished so far – and how Congress and the Administration can work together with industry – to ensure U.S. supremacy in the new space race.
Scott Pace, Executive Secretary of the National Space Council.
Credit: POLITICO/Screengrab
Expert panels
The event began with a conversation with Scott Pace, Executive Secretary of the National Space Council. Another panel featured Reps. Ami Bera (D-Calif.), Randy Hultgren (R-Ill.) and Mary Lynne Dittmar, president and CEO, Coalition for Deep Space Exploration.
Also featured during the event was a conversation between Dennis Muilenburg, Chairman, President and Chief Executive Officer of The Boeing Company and Robert Allbritton, Publisher and Executive Chairman of POLITICO to discuss strategic priorities of the aerospace industry.

Credit: POLITICO
Weekly briefing
This gathering marked the launch of POLITICO Space, the weekly briefing on the policies, programs, and personalities shaping the second Space Age in Washington, D.C. and beyond.
To view the event, go to:
https://www.politico.com/live-events/2018/04/12/politico-space-the-launch-event-491342
POLITICO Live is an extension of POLITICO’s journalism. We convene global thought- leaders and influential experts to discuss key issues, big ideas and trends playing out at the intersection of local, national and international policy and politics.
For more details on POLITICO Live, go to:
https://www.politico.com/live-events/about

