Archive for the ‘Space News’ Category

Credit: Center for Space Policy and Strategy
The Policy and Science of Rocket Emissions is a new space policy paper from The Aerospace Corporation’s Center for Space Policy and Strategy. Authors Martin Ross and James Vedda consider the effects of rocket emissions in the atmosphere—what is known, and what is not.
“Rocket emissions inherently impact the stratosphere in a way that no other industrial activity does. This is a fundamental aspect of placing payloads into space using chemical propulsion,” explains the report.
Rocket emissions have largely escaped the scrutiny of international regulatory bodies—but that can change at any time, the just issued paper explains. New policies and regulations could be prompted by a general shift in public perception, by an unintended connection to climate-engineering debates, and by a switch to new propellant types.

Credit: Center for Space Policy and Strategy
Effluent influences
As explained in the report, rockets directly inject combustion products (most importantly, particles) into the stratosphere—a particularly sensitive region that is home to the ozone layer. These emissions deplete the ozone and alter the radiative balance of the atmosphere, the authors say. As a result, they contribute to the complex interactions that determine global climate.
Although the effects are still minor compared with other ozone and climate influences, they could assume much greater significance in the years ahead, with launch rates expected to increase dramatically.
Take a read of this new, important paper at:
http://aerospace.wpengine.netdna-cdn.com/wp-content/uploads/2018/04/RocketEmissions.pdf

Credit: SpaceX
Commentary by William B. Miller, Jr., M.D.
It was the greatest car ad ever conceived. A red Tesla Roadster was launched into space with a jaunty spaceman mannequin at the wheel. As it streaks around our solar system at speeds of seven miles per second, its dashboard screen reads a playful, ‘Don’t panic’.

Don’t panic! Tesla Roadster en route and outbound.
Credit: SpaceX/Screen Grab.
Initial press coverage was fawning. The biggest question was, “Is this art or advertising?” It was never mentioned that the car and its mannequin are loaded with microbes. There hadn’t even been any real attempt to clean it prior to launch. No big deal. It’s just floating in space and won’t impact a planet for a million years or more. However, its elliptical orbit around the Sun has it crossing Mar’s orbit every 18.8 months. It will often get close.

Credit: Ben Pearson
No one seems to care that this craft will gradually deteriorate over time from the impact of innumerable micrometeorites during its endless loops throughout the solar system. And no one seems to understand that particles of those micrometeorites will ricochet off the car and mannequin and carry bits and pieces of it wherever they go. And no one has noted that on every miniscule bit, there will a new set of traveling companions. Wherever those particles go, associated microbes will now circulate with those particles, some of which will travel outward for light years.
It is actually the same for all the NASA spacecrafts that have ever been launched. To NASA’s credit, they have actually tried to be careful. NASA has been rightfully concerned about the possibility of sending our planetary life out into space. To that end, they enacted rigorous ‘clean’ rooms. Prior to launch, vehicles were carefully scrubbed to get rid of any lurking microbes. When our space craft were launched, they were thought to be sterile.

As InSight’s solar arrays unfurl in a pre-launch test, specially garbed test engineers carefully inspect their deployment. The spacecraft heads for Mars in May.
Credit: Barbara David
Unfortunately, what NASA believed to be true, was not. It is now understood that the culture techniques that NASA relied upon to determine sterility were utterly insufficient. In our contemporary era, there are new tools of genetic assessment that permit our identification of a much wider range of microorganisms than in prior decades. In fact, it is now known that fewer than 10% of all microbes can be cultured in the standard manner that NASA was diligently applying. Therefore, the tests that NASA relied upon to issue their declarations of sterility were unfortunately completely inaccurate.
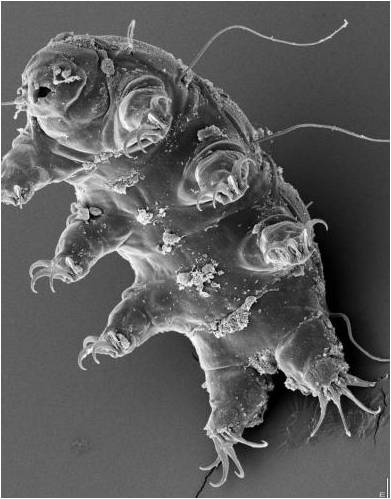
Water-dwelling micro-animals called Tardigrades.
Courtesy: P. Lubin
Although the NASA spacecrafts were culture negative upon launch, they were actually abounding with covert microbial life. Furthermore, we now know that many microbes can withstand every rigor of space flight. In the vacuum of space, with its absolute cold and bursts of destructive radiation, humans would instantly die. Yet, some microbes do not, nor do singular small animals, called Tardigrades. These incredibly resilient microscopic eight-legged creatures can withstand all the extremes of space. We know that this is true, since some of them have even survived reentry back to our planet from other space flights.
It is these exact findings that inform us that single most important event in our entire human history is currently transpiring. This unheralded event is the passage of the Voyager 1 and 2 spacecrafts beyond our solar system and exiting into interstellar space. What makes this passage so momentous is that both of these crafts carry life.
As originally envisioned, the mission of the Voyager spacecrafts was to study the outer planets of our solar system. In this regard, that mission has been highly successful. The Voyager craft left Earth in 1977, arrived at Jupiter in 1979, and then passed by Jupiter, Saturn and Uranus, to arrive at Neptune by 1989. Important physical discoveries were cataloged at each planet, such as the magnetospheres of Uranus and Neptune. By mission design, there was never any possibility of return. Instead, the craft were tasked towards an endless continuation into deep space.
Now Voyager 1 is over 13 billion miles from Earth, with Voyager 2 close behind. Currently, they are just at the margin of the heliosphere which is the large zone influenced by our Sun. Thereafter, interstellar space looms and the Sun’s influence rapidly fades.

Voyager spacecraft.
Credit: NASA/JPL
Although the milestones of the Voyager craft are being minutely detailed, NASA astronomers remain completely mum about the most portentious aspect of this Voyager mission. That silence is not entirely surprising since, until the Tesla car launch, the Voyager mission represents the most egregious example of unintended consequences in human history.
Though this event receives no attention, it is immensely more significant than any war in human history, or any ideology, or all of our art and culture. Without planning to do so, we have launched microbial life from this planet. Now, for endless eons, that tenacious life will be propelled outward into deep space. Everywhere Voyager goes, life will be shed. It is the same, but even more so, for the supremely egotistical Tesla in space. Both are instances of singular technical achievement and delinquent government oversight.
There is a theory of the origin of life that suggests that it began on Earth as an instance of Panspermia. In effect, life on this planet began elsewhere, finding a home here and thriving. Now, without explicit intent, both of the Voyager spacecrafts and the Tesla advertisement have begun the process of seeding of life throughout the Cosmos. In our uniformed hubris, we have become an unintentional agency of Panspermia. Now, in a direct sense, we have become a Cosmic invasive species.
Let it be our earnest hope that we will be forgiven.
Dr. Bill Miller had been a physician in academic and private practice for over thirty years. He is the author of The Microcosm Within: Evolution and Extinction in the Hologenome. Miller is an internationally recognized evolutionary biologist and an expert on the emerging science of the microbiome. He is the author/co-author of numerous academic papers on the microbiome and evolution, serves as guest editor of a major academic biology journal and is co-editor of a forthcoming textbook on developmental and evolutionary biology. Connect with him on Twitter, @billmillermd.

Lunar Ride and Phone Home Service
Credit: SSTL
There are new partnerships afoot that make the commercial lunar economy a potential actuality. A newly-inked collaboration agreement is geared to commercial Moon missions.
In this instance, the European Space Agency partnered with the U.K.’s Surrey Satellite Technology Limited (SSTL) group and the Goonhilly Earth Station in Cornwall, England.
Goonhilly is an independent, privately-owned business providing a complete range of satellite communications services and a range of space and data related services.
No stranger to lunar exploration duties, Goonhilly beamed the Apollo 11 Moon landing to millions of viewers in 1969. The new partnership, dubbed the Lunar Pathfinder mission – steps forward to implement a sustainable, long-term commercial service that supports lunar scientific and economic development, both for Europe and other nations.

Moon village advocate, ESA’s chief, Johann-Dietrich Woerner.
Credit: ESA–S. Corvaja
Moon Village support
The intention by Goonhilly is to help catalyze the lunar economy and provide affordable services at the Moon and beyond.
In signing the agreement last week, David Parker, Director of Human and Robotic Exploration at ESA, called the first partnership for providing commercial services in support of lunar missions as enabling ESA to deliver innovative lunar missions at lower costs.
“This commercial partnership is part of a broader ESA innovation plan,” he said, one that “is consistent with the ESA Director General’s wider Moon Village concept, in which actors around the world can contribute in different ways to sustained lunar exploration.”

Commercial interest in returning to the Moon.
Photo Credit: NASA/GSFC
Ride and phone home
The signed partnership leads to the maturation of the Lunar Pathfinder space segment for a low cost “Ride and Phone Home” capability.
The Lunar Pathfinder mission will offer a ticket to lunar orbit for payloads and nanosats onboard an SSTL lunar mothership spacecraft that provides communications data relay and navigation services between customer payloads and the Goonhilly Earth Station Deep Space ground station.
Private and government-sponsored lunar landers, rovers and surface impactors will also be able to sign up to use the lunar communications and navigation services provided by the mothership either for primary mission operations, to provide additional capacity, or as a back-up service.
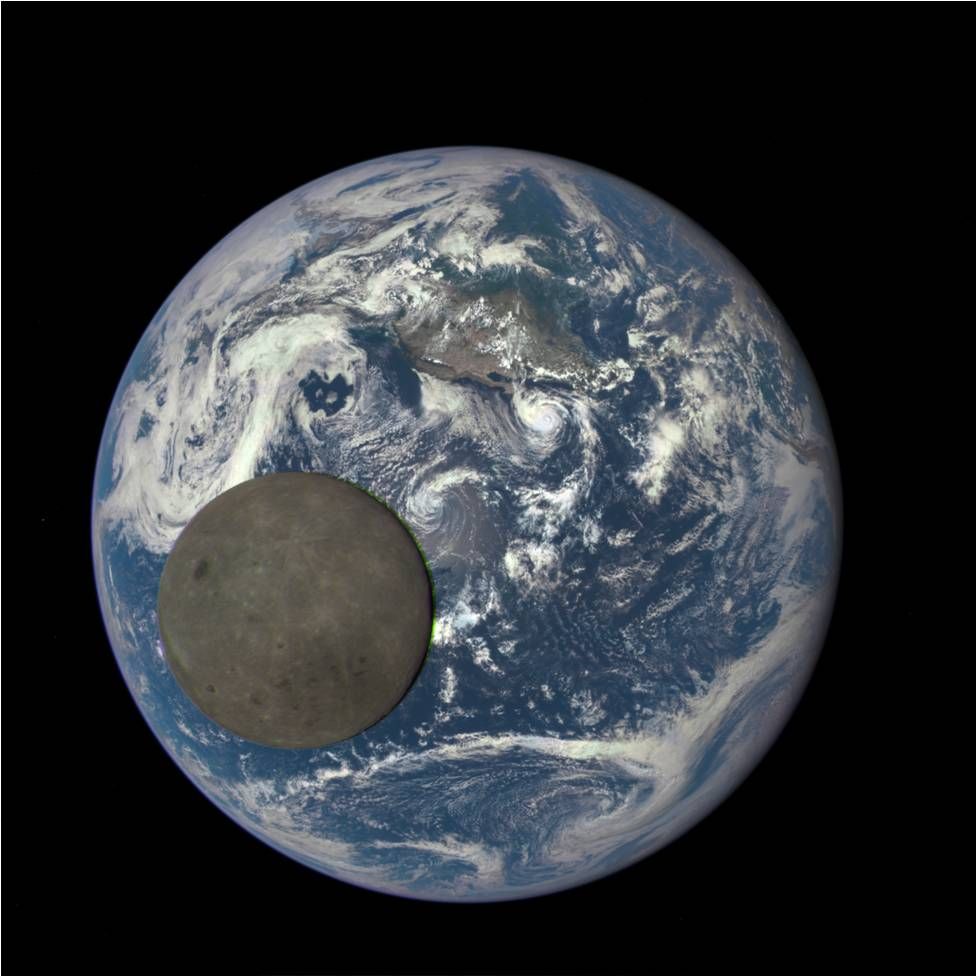
Moon’s far side captured by NOAA’s Deep Space Climate Observatory (DSCOVR).
Credit: NOAA/NASA
Far side.com
For prospecting, exploring, and ultimately utilizing the far side of the Moon, this communications relay service is viewed as a mission enabler, providing the bridge between Earth and the lunar surface.
According to an SSTL statement, the stable elliptical orbit of the mothership will allow for long duration visibility of the Southern Lunar Hemisphere each day, with maximum opportunities for the transmission and reception of data between Earth and the lunar surface.
Alice Bunn, International Director at the UK Space Agency, added that while the new agreement covers missions to the Moon, “there is no reason why we couldn’t see a similar service for Mars in the future.”
Prospective customers for Lunar Ride and Phone Home opportunities are encouraged to contact:

Credit: NASA/JPL-Caltech/Univ. of Arizona
A new Curiosity traverse map through Sol 2030 has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2030 Martian day, or sol, of the rover’s mission on Mars (April 23, 2018).
The robot has just begun Sol 2032 science duties.
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2027 to Sol 2030, Curiosity had driven a straight line distance of about 44.65 feet (13.61 meters), bringing the rover’s total odometry for the mission to 11.69 miles (18.81 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
New imagery from the robot shows its present surroundings.

Curiosity Mastcam Left image acquired on Sol 2030, April 23, 2018.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mastcam Left photo taken on Sol 2030, April 22, 2018.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Front Hazcam Right B image acquired on Sol 2031, April 23, 2018.
Credit: NASA/JPL-Caltech

Curiosity Navcam Left B photo taken on Sol 2030, April 23, 2018.
Credit: NASA/JPL-Caltech

Curiosity Navcam Left B photo taken on Sol 2030, April 23, 2018.
Credit: NASA/JPL-Caltech

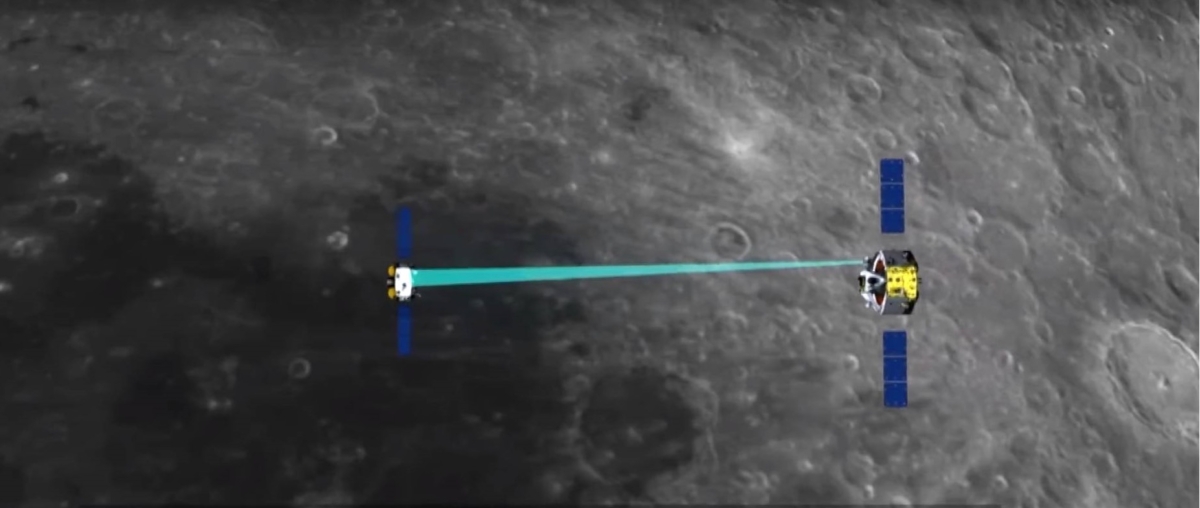
Earth-Moon L2 relay link.
Credit: CNSA
The China National Space Administration (CNSA) has announced the name of the relay satellite to be used in the country’s Chang’e-4 far side Moon lander project.
Enter drum roll: “Queqiao” – bridge of magpies.
As explained by China’s Xinhua news agency: In a Chinese folktale, magpies form a bridge with their wings on the seventh night of the seventh month of the lunar calendar to enable Zhi Nu, the seventh daughter of the Goddess of Heaven, to cross and meet her beloved husband, separated from her by the Milky Way.
Together with the relay satellite, two microsatellites, developed by the Harbin Institute of Technology, will also be sent into orbit to conduct scientific research. The names of those two satellites were also announced: “Longjiang-1” and “Longjiang-2.”

Chang’e-4 Moon lander and rover.
Late May launch
Slated for launch in late May by a Long March-4 rocket, the relay satellite is to be placed into a halo orbit of the Earth-Moon Lagrange Point L2. The relay satellite and rocket are both at the launch center in Xichang, southwest China’s Sichuan Province.
Six months later, the Chang’e-4 far side lander and rover will be sent to the Moon. Chang’e-4 also will tote payloads for Germany, the Netherlands, Saudi Arabia and Sweden.
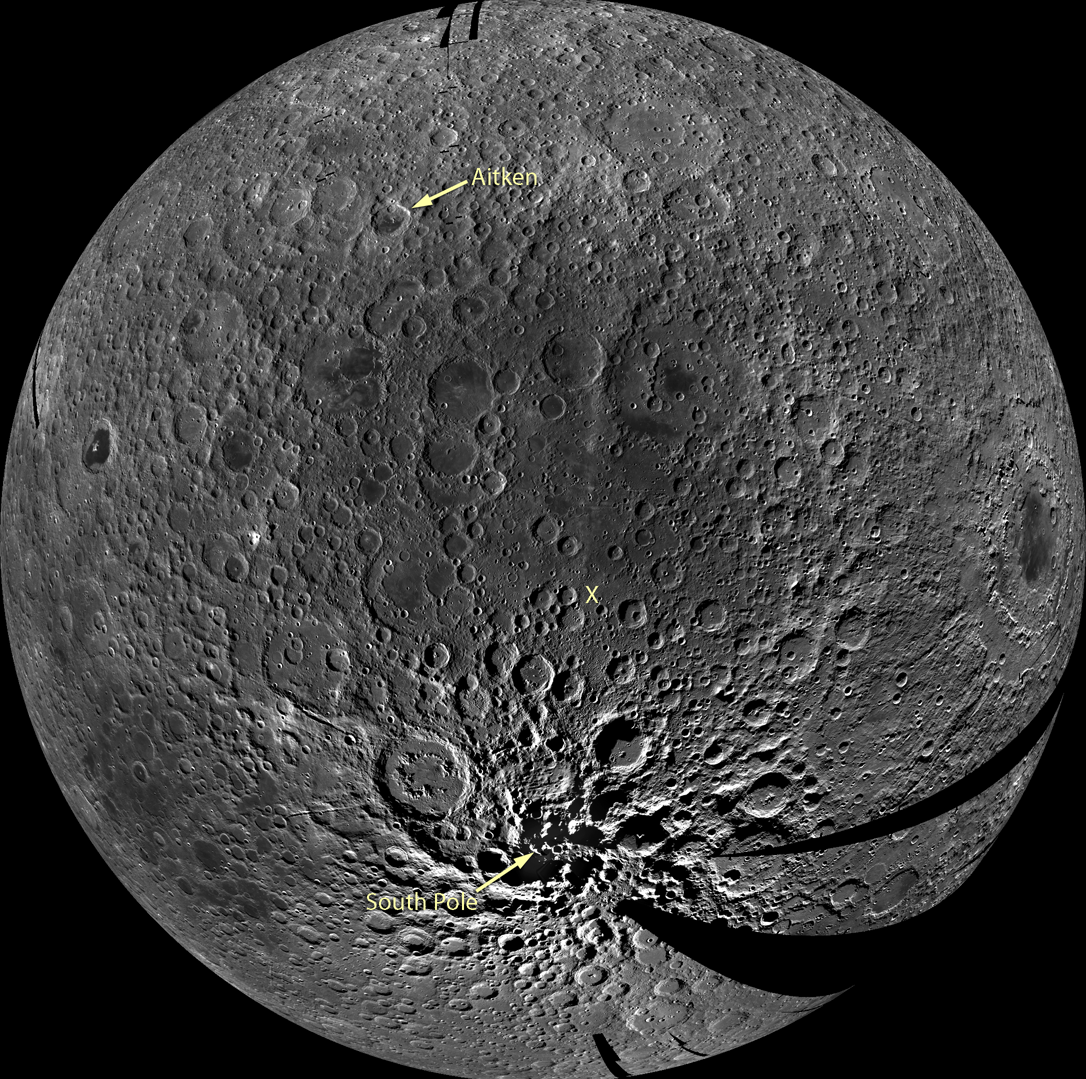
Aitken crater, located at 17 S, 173 E, anchors the northern rim of the South Pole-Aitken basin.
Credit: NASA/GSFC/Arizona State University
Gravitational equilibrium
As reported by Xinhua, Bao Weimin, director of the Science and Technology Commission of the China Aerospace Science and Technology Corporation said: “We designed an orbit at the Earth-Moon Lagrange Point L2 about 450,000 kilometers from the Earth, where a gravitational equilibrium can be maintained, and the relay satellite will be able to ‘see’ both the Earth and the far side of the Moon.”
Bao added that the whole mission “is very complex and challenging. We feel great pressure, but we are confident.”
The relay and microsatellite names were announced on China’s “Space Day.” April 24 marks the day when China’s first satellite was sent into space in 1970, and has been celebrated as the country’s Space Day since 2016.

Credit: New China/Screengrab
Sample return next year
In a related Xinhua news agency story, CNSA’s Pei Zhaoyu, deputy director of the Lunar Exploration and Space Program Center said the launch of Chang’e-5 lunar probe is planned for next year.
That mission is designed to bring lunar samples back to the Earth. Chang’e-5 was delayed from last year due to a Long March-5 booster failure and subsequent investigation of the mishap. That heavy-lifter rocket is needed to hurl the return sample craft moonward.

Credit: New China/Screengrab
Complex undertaking
Pei said that the Chang’e-5 lunar probe will be very complex, containing four parts: an orbiter, a returner, an ascender and a lander.
The Moon lander will grab and stash lunar samples in the ascender. Rocketing off the lunar surface, the ascender is to rendezvous and dock with the orbiter, then transfers the collection into the returner, Pei said.
Credit: New China/Screengrab
The orbiter and returner would head back to the Earth, Pei said, separating from each other when they are several thousands of kilometers from the Earth. Finally, the returner will make its way back to the Earth.
In the Xhinua reporting, Tian Yulong, secretary general of CNSA, said after fulfilling the three steps of China’s lunar probe program — orbiting, landing and returning – the country will conduct further lunar exploration, including landing and probing the polar regions of the Moon.
For a behind-the-scenes look at China’s Chang’e-5 mission preparations, go to this CCTV-Plus video:
http://cd-pv.news.cctvplus.com/2016/1231/8039831_Preview_1806.mp4

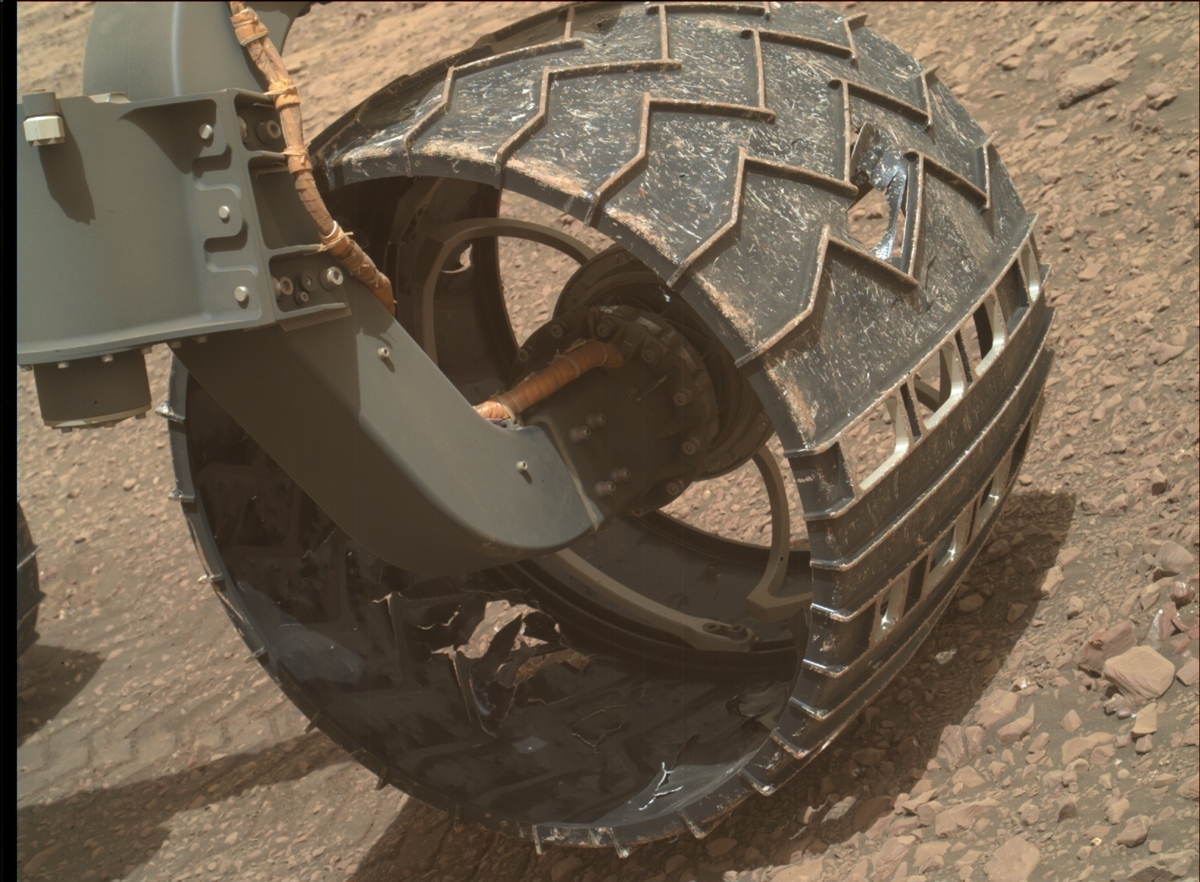
Mars Hand Lens Imager (MAHLI) photo taken on April 22, 2018, Sol 2030.
Credit: NASA/JPL-Caltech/MSSS
Abigail Fraeman, a planetary geologist at NASA’s Jet Propulsion Laboratory in Pasadena, California, reports that the robot drove a little over 52 feet (16 meters) to the east over last weekend.
“The rover is currently skirting around the southern edge of a small, blocky impact crater on its way north off the Vera Rubin Ridge,” Fraeman explains. The rover’s Mars Hand Lens Imager (MAHLI) was used to take images of the rover wheels.
Tracking damage
“We do this activity, dubbed Full MAHLI Wheel Imaging (or FMWI in NASA acronym speak), every few hundred meters to track damage to Curiosity’s wheels caused by the terrain. It’s important for us to take this observation in order to estimate how much farther the rover will be able to drive before the wheels become inoperable, and also to understand if the sharp edges of the broken wheels risk damaging the nearby cables,” Fraeman explains. “So far, we estimate we’re in pretty great shape for our plans to drive a lot farther up Mt. Sharp!”
Fraeman added that the last few years, the robot has been actively working to mitigate wheel damage in several ways.
“JPL engineers developed some smart driving algorithms called ‘traction control’ that reduce forces on Curiosity’s wheels as the rover climbs over rocks. Geologists like myself also help by planning drive paths over terrain that is safer for the wheels.”
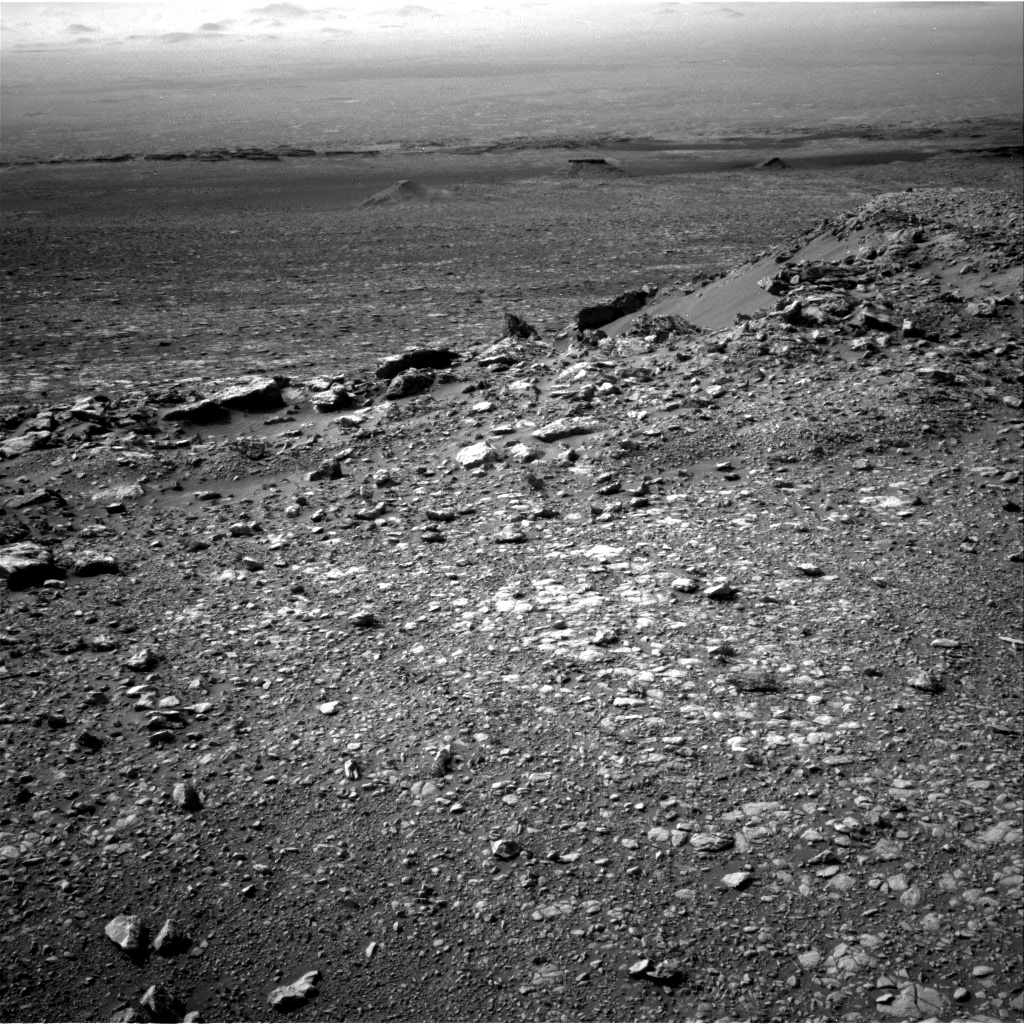
Mars Hand Lens Imager (MAHLI) photo taken on April 22, 2018, Sol 2030.
Credit: NASA/JPL-Caltech/MSSS
Sol-to-sol
The robot’s driving is determined on a sol-to-sol basis in tactically staffed roles known as Surface Properties Scientist (SPS).
“Strategically, we also work with the orbital datasets to predict what the terrain ahead will look like, and we use these predictions to choose long-term paths that will be easiest on the wheels without sacrificing science,” Fraeman points out.
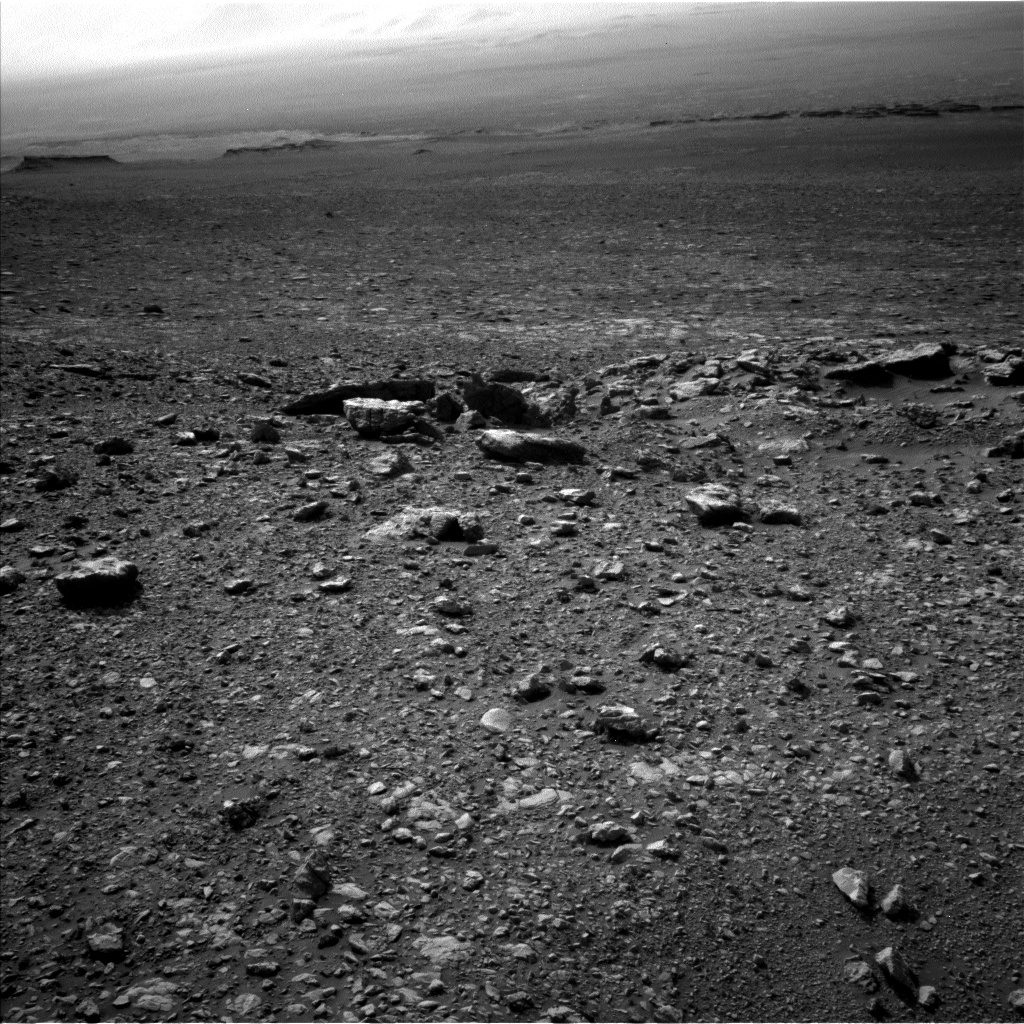
Sharp edges
Curiosity’s path from the last few sols have been dictated by driving along terrain that looks darker and bluer compared to the nearby bright, tan rocks.
“This path corresponds to terrain that is filled with pebbles and hard-packed sand, and we think it’s a little nicer for the wheels than the bright bedrock, which can sometimes have sharp edges. The geologic term for these sharp edged rocks is ventifacts, and they are formed by wind erosion over millions of years. While they probably won’t hurt the wheels too much, we’d prefer to avoid them when possible,” Fraeman concludes.
Curiosity Navcam Right B photo acquired on Sol 2030, April 23, 2018.
Credit: NASA/JPL-Caltech
Now in Sol 2031, NASA’s Curiosity Mars rover has relayed new imagery, including self-inspection photos of wheel wear and tear:
Curiosity Navcam Left B image taken on Sol 2030, April 23, 2018
Credit: NASA/JPL-Caltech

Curiosity Mastcam Right image taken on Sol 2029, April 21, 2018.
Credit: NASA/JPL-Caltech/MSSS

Mars Hand Lens Imager (MAHLI) photo produced on Sol 2030, April 22, 2018.
Credit: NASA/JPL-Caltech/MSSS
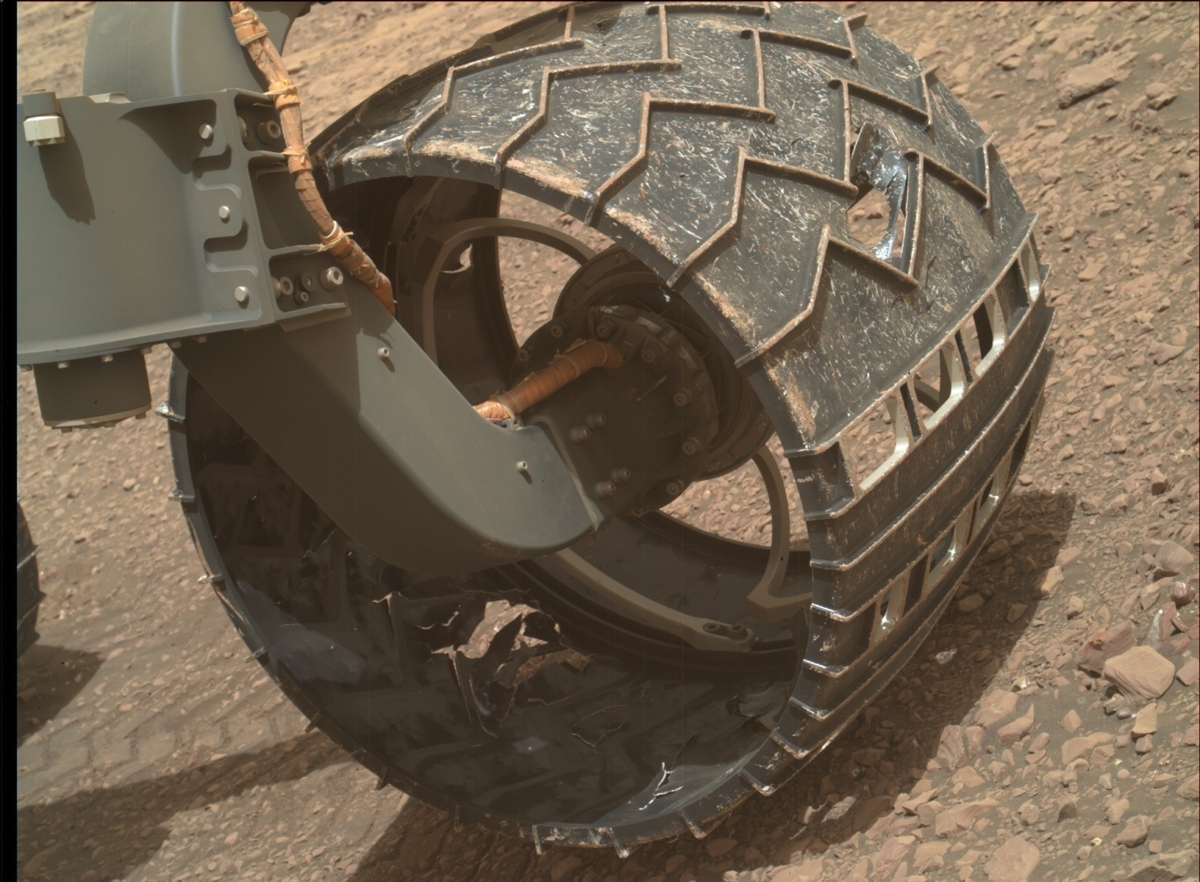
Mars Hand Lens Imager (MAHLI) photo produced on Sol 2030, April 22, 2018.
Credit: NASA/JPL-Caltech/MSSS

The Earth straddling the limb of the Moon, as seen from above Compton crater.
Credit: NASA/GSFC/Arizona State University
Carnegie Mellon University’s CREATE Lab has established an EarthTime website. It enables users to interact with visualizations of the Earth’s transformation over time.
Combining huge data sets with images captured by NASA satellites between 1984 and 2016, EarthTime brings to life patterns of natural change and human impact.
Rapid urbanization
For example, city growth can be studied with land imagery and lights visible from space at night. An EarthTime user can compare how cities across the world accommodate for rapid urbanization by growing both outward and upward.
Users of EarthTime can view compelling animations accompanied by fact-based narratives from international experts.
Drawing upon EarthTime’s vast data library, the stories are curated in honor of Earth Day 2018. Explore stories to learn more about our collective impact on the planet.
“EarthTime is a means to tell stories. The impact of humanity can be seen globally and in individual communities. You really can’t understand climate change, migration or major social and political trends without examining their connections across time, across space and between each other. EarthTime enables you to do that,” explains Illah Nourbakhsh, Director – CREATE Lab.
To make use of EarthTime, go to:

Credit: CSPS
Aerospace’s Center for Space Policy and Strategy (CSPS) released a new policy paper that explores future opportunities in cislunar space—essentially, the space inside the moon’s orbit and the orbital area around the moon.
The policy document — Cislunar Development: What to Build— and Why –discusses the possible applications for cislunar space—for example, outposts on the moon, extraterrestrial mining operations, interplanetary waystations—and determines the infrastructure that will be needed to realize those ambitious goals.
Underdeveloped resource
Author James Vedda, senior policy analyst with CSPS, says that the cislunar region remains a largely underdeveloped resource, and any coherent, long-term strategy for space commerce and exploration will need to make better use of it.

Credit: NASA
“An enduring, multi-purpose space infrastructure means more than just rockets and spacecraft,” explains Vedda. “It needs a wide range of capabilities, such as inter-orbital transportation, on-orbit servicing, standardization, fuel storage, energy distribution, communication and navigation services, resource extraction, and materials processing.”
The Center is part of The Aerospace Corporation, a nonprofit that provides objective advice to the government on complex space enterprise and systems engineering problems.
To access the policy paper, go to:
http://aerospace.wpengine.netdna-cdn.com/wp-content/uploads/2018/04/CislunarDevelopment.pdf

Official SpaceX OTV-5 mission patch.
Credit: SpaceX
The classified U.S. Air Force X-37B space plane program is now flying its Orbital Test Vehicle (OTV-5) mission. Skywatchers are reporting the craft recently made an orbital altitude change.
OTV-5’s space jaunt began on September 7, 2017. To date, the orbiting craft has chalked up some 225 days of flight.
Here’s a view of OTV-5 on April 19, 2018 taken by Tristan Cools of the Belgian Working Group Satellites at:
https://drive.google.com/open?id=1hByWFGaatbAUSvMyeqdQsQnaw82AV0Iu

The U.S. Air Force’s X-37B Orbital Test Vehicle 4 is seen after landing at NASA ‘s Kennedy Space Center Shuttle Landing Facility in Florida on May 7, 2017.
Credit: U.S. Air Force courtesy photo
Also, the OTV-5 craft passing in front of the Moon was acquired by Kevin Fetter, an amateur Canadian satellite spotter in Brockville, Ontario and can be viewed at:
https://www.youtube.com/watch?v=6L0aP7my_P4&feature=youtu.be

