Archive for the ‘Space News’ Category

Credit: ESA/Hubble & NASA
NASA, with support from Bryce Space and Technology, has developed a map capturing a cultural perspective of locations in the solar system and points beyond. The Strategic Geography of the Solar System and Beyond was produced for NASA Space and Technology Mission Directorate Office of Emerging Space.
The map’s emphasis is on three parts of human geography:
— strategic geography (control of, or access to, spatial areas that have an impact on the security and prosperity of nations),
— economic geography (patterns of trade and finance, infrastructure and facilities that contribute to the economy of a region), and
— social geography (interaction of social processes, cultural products and norms and their variations).
Unique in that it is not strictly science or engineering focused, the wall chart is designed to elicit discussion and creative thinking about our future in space.
Go to: https://brycetech.com/insight-2018-05-21.html

Axiom space station.
Credit: Axiom Space
Axiom Space is offering expeditions to space aboard the International Space Station (ISS)…and ultimately the Axiom commercial space station complex.
Ten-day missions are priced at $55 million with the first launch occurring in 2020. The price includes transportation to and from the ISS, everything necessary to live and enjoy the experience while on orbit, and a 15-week, transformational training experience.
Axiom Space is building the world’s first commercial space station. The Axiom commercial space station complex would be assembled while connected to ISS and separate upon the retirement of the ISS.
Axiom Space is headquartered in Houston, Texas and is led by Mr. Michael Suffredini, former Manager of NASA’s International Space Station program.

Axiom Station Crew Quarter View.
Credit: Axiom Space
Dream project
The new station habitation spaces, including the crew quarters, dining area and galley, are being designed in partnership with Philippe Starck, an architect and designer.

Axiom Station Cupola View.
Credit: Axiom Space
“This is a dream project for a creator like me with a genuine fascination for aviation and space exploration,” said Starck in a press statement. “The greatest human intelligence in the world focuses on space research. My vision for the Habitation Module on Axiom Station is to create a comfortable egg that is inviting with soft walls and a design perfectly in harmony with the values and movements of the human body in zero gravity.”
For more information, go to:
Panoramic Camera: image from Opportunity on Sol 5111.
Credit: NASA/JPL
NASA will host a media teleconference today at 10:30 a.m. PDT (1:30 p.m. EDT) Wednesday, June 13, to discuss the health of NASA’s Opportunity rover.
A massive Martian dust storm is affecting operations of the solar powered robot. The storm is one of the most intense ever observed on the Red Planet.
As of June 10, the dust storm covered more than 15.8 million square miles (41 million square kilometers) — about the area of North America and Russia combined.
It has blocked out so much sunlight, it has effectively turned day into night for Opportunity which is located near the center of the storm, inside Mars’ Perseverance Valley on the west rim of Endeavour Crater.
Low-power response
In response, on Monday, June 4, 2018 and Tuesday, June 5, 2018 (Sols 5106 and 5107), two low-power plans were developed for Opportunity. Since then the atmosphere over the rover has continued to deteriorate. On Sol 5105 (June 3, 2018; the last sol of the weekend plan), Opportunity’s solar arrays generated 468 watt-hours of energy with an atmospheric opacity (tau) of around 1.0.
On Sol 5106 (June 4, 2018), energy was down to 345 watt-hours with a tau of 2.1. Additionally, on Sol 5107 (June 6, 2018), the energy dropped further to 133 watt-hours. We were unable to get a measurement of tau on Sol 5107 (June 6, 2018), but it is estimated to be above 3.0.
Opportunity has not seen this level of atmospheric opacity in over a decade.
Wake-up calls
In Sol 5108 (June 7, 2018) the rover team crafted a minimum-power two-sol plan, where the rover wakes on the first sol only to receive the morning commands then sleeps to the next sol with a brief wake-up in the morning. Subsequently, naps until the afternoon for a quick atmospheric measurement with the Panoramic Camera (Pancam) then a brief communication session with MRO and back to sleep.
The rover team will likely continue this low-power strategy for Opportunity until conditions improve.
Far from dead
Opportunity landed in Meridiani Planum on January 24, 2004 at 9:05 pm Pacific Time.
Rumors of Opportunity’s death are very premature, explains James W. Rice, Jr., Geology Team Leader on the Mars Exploration Rover Project. “We are far from dead at this moment! It’s a grim situation right now, no doubt about it, and we still have a long way to go in this our latest challenge on the Red Planet. However, we have an impressive record of overcoming challenges in the past 14.5 years and our team is the best on both worlds!”

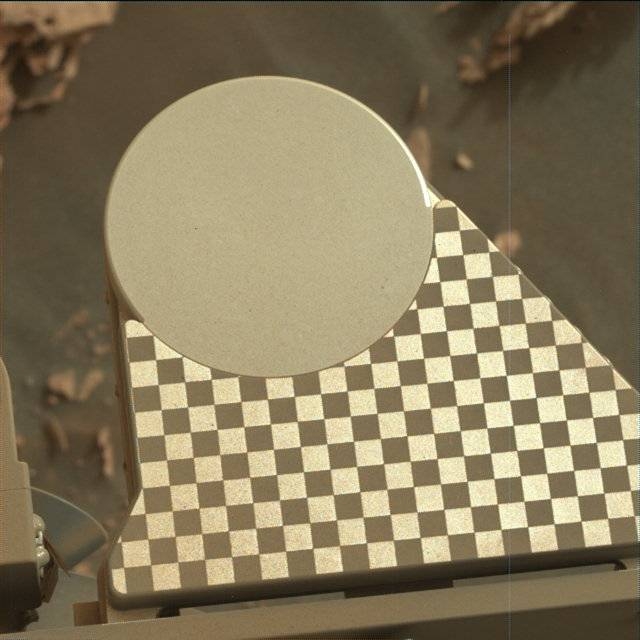
Curiosity Mastcam Left image acquired on Sol 2077, June 10, 2018.
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 2079, NASA’s Curiosity Mars rover is monitoring an evolving dust storm on the Red Planet.
Over the weekend, an error cropped up during a regular test of the high gain antenna (HGA) actuators, leaving the antenna unavailable for uplink of a recent plan, but otherwise healthy, reports Michelle Minitti, a planetary geologist for AFramework in Silver Spring, Maryland.
The team instead was to use Mars Reconnaissance Orbiter (MRO) to uplink a brief suite of activities to the rover, including the commands to recover the high gain antenna for use.

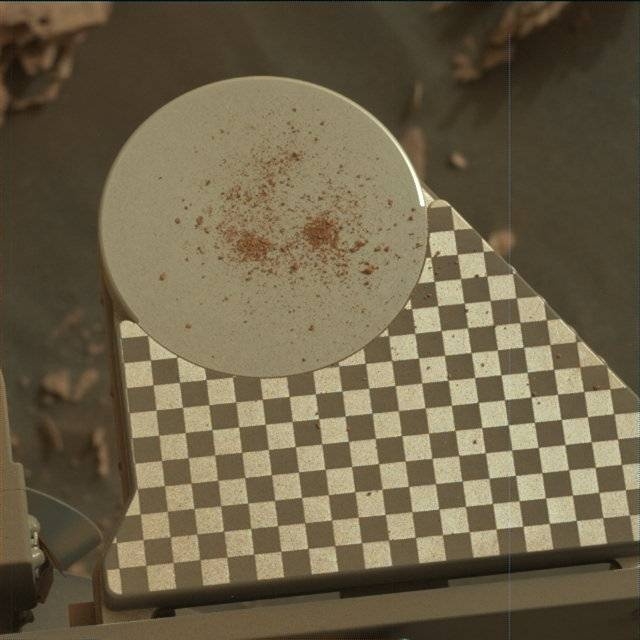
Curiosity Mastcam Right photo taken on Sol 2078, June 11, 2018.
Credit: NASA/JPL-Caltech/MSSS
Drill-related duties
The MRO uplink window is hours later than a usual HGA uplink window, so with less time in the plan, so robot operators had to postpone drill-related work until a later plan, Minitti adds.
Curiosity researchers, however, did get confirmation that all is ready for the next step of drill-related activities: dumping the “Duluth” sample for analysis by Alpha Particle X-Ray Spectrometer (APXS), the rover’s Mars Hand Lens Imager (MAHLI), Chemistry and Camera (ChemCam) and Mastcam.
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2077, June 10, 2018.
Credit: NASA/JPL-Caltech/LANL
A new plan calls for high-priority activities dedicated to monitoring the changing conditions associated with the ever-growing dust storm on Mars, Minitti notes.
Dust loads
“Mastcam will measure the dust load in the atmosphere, and image two areas, ‘Noodle Lake’ and a spot where a test Duluth sample portion was dropped, to look for wind-induced changes,” Minitti reports.
Curiosity Mastcam Left image taken on Sol 2078, June 11, 2018 at 08:11:51 UTC.
Credit: NASA/JPL-Caltech/MSSS
Curiosity Mastcam Left photo acquired on Sol 2078 June 11, 2018 at 08:16:40 UTC.
Credit: NASA/JPL-Caltech/MSSS
Regular Rover Environmental Monitoring Station (REMS) measurements will provide scientists the data they need for weather reports as the storm builds.

Credit: Boeing
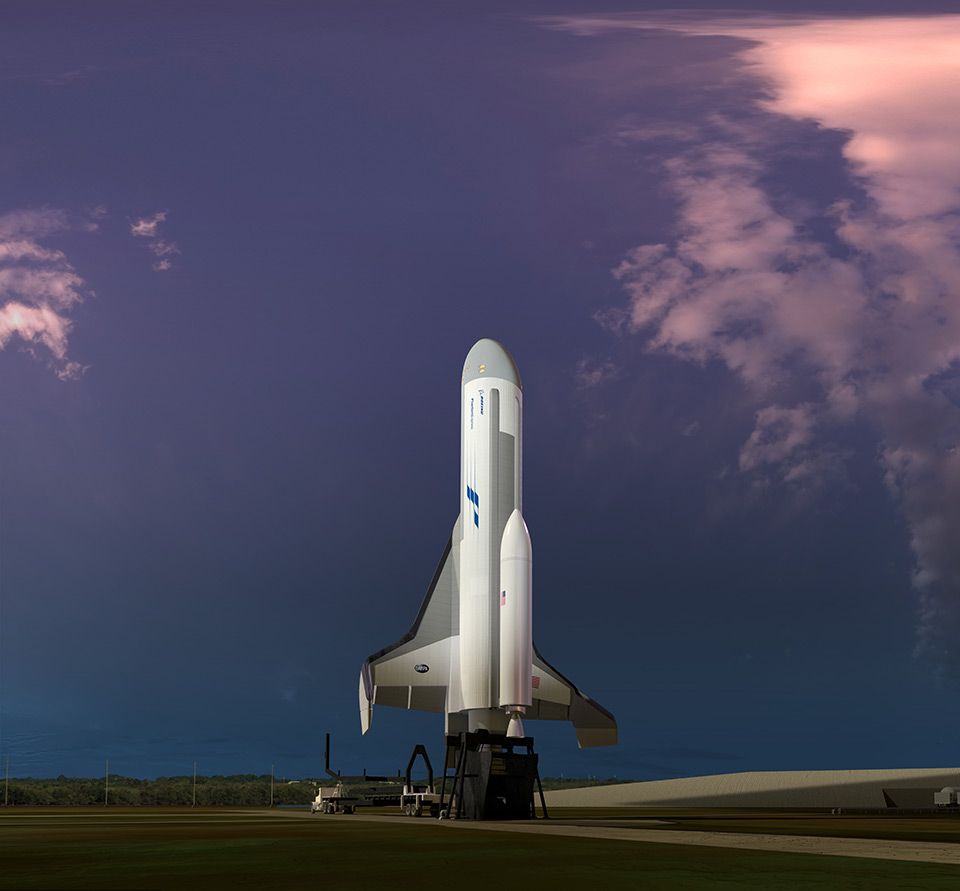
The powerhouse engine for the reusable Phantom Express spaceplane is slated to undergo a series of daily hot-fire tests at NASA’s Stennis Center in Mississippi starting this summer.
Boeing is building the spaceplane under the Defense Advanced Research Projects Agency (DARPA) program.
The reusable Phantom Express spaceplane will take off vertically and land horizontally. The vehicle will be equipped with an expendable second stage capable of placing up to 3,000 pounds (1,361 kg) of payload into low Earth orbit.
Behind the program is demonstrating a new paradigm for more routine, responsive and affordable space access.

Aerojet Rocketdyne technicians complete final assembly on the first AR-22 rocket engine, shown at its facility located at Stennis Space Center. The engine was built for Boeing as part of the U.S. Defense Advanced Research Projects Agency Experimental Spaceplane program.
Credit: Aerojet Rocketdyne
Reusability feature
Aerojet Rocketdyne’s AR-22 engine is capable of generating about 375,000 pounds (170,097 kg) of thrust and was designed to fly 55 missions with service every 10 missions. This reusability feature makes the AR-22 ideally suited for Phantom Express.
Derived from the Space Shuttle Main Engine that was designed from the outset for reusability, the AR-22 is the main propulsion for Phantom Express.
Aircraft-like operations
In a company statement, AR-22 Program Manager Jeff Haynes said: “The aircraft-like operations of Phantom Express are an important factor in the rapid turnaround of this spaceplane.” Haynes added that the engine has a hinged nacelle “that makes it easier to access and inspect the engines for rapid turnaround.”
Credit: Boeing
AR-22 testing will also provide insights that will be used to refine Phantom Express flight and turnaround procedures, while also informing the design requirements for the new ground infrastructure that Boeing is developing for the flight program.

This global map of Mars shows a growing dust storm as of June 6, 2018. The map was produced by the Mars Color Imager (MARCI) camera on NASA’s Mars Reconnaissance Orbiter spacecraft. The blue dot indicates the approximate location of Opportunity.
Credit: NASA/JPL-Caltech/MSSS
Science operations for NASA’s Opportunity rover have been temporarily suspended as it waits out a growing dust storm on Mars.
The storm now spans more than 7 million square miles (18 million square kilometers) — an area greater than North America — and includes Opportunity’s current location at Perseverance Valley.

Opportunity photo taken by rover’s Front Hazcam Sol 5104.
Credit: NASA/JPL
Atmospheric opacity
The swirling dust has raised the atmospheric opacity, or “tau,” in the valley in the past few days, blotting out sunlight. The Opportunity rover uses solar panels to provide power and to recharge its batteries. The rover’s power levels had dropped significantly by Wednesday, June 6, requiring the Mars machinery to shift to minimal operations.

Opportunity image acquired by rover’s Navigation Camera Sol 5083.
Credit: NASA/JPL
Opportunity is in its 15th year; the team has operated the rover for more than 50 times longer than originally planned.
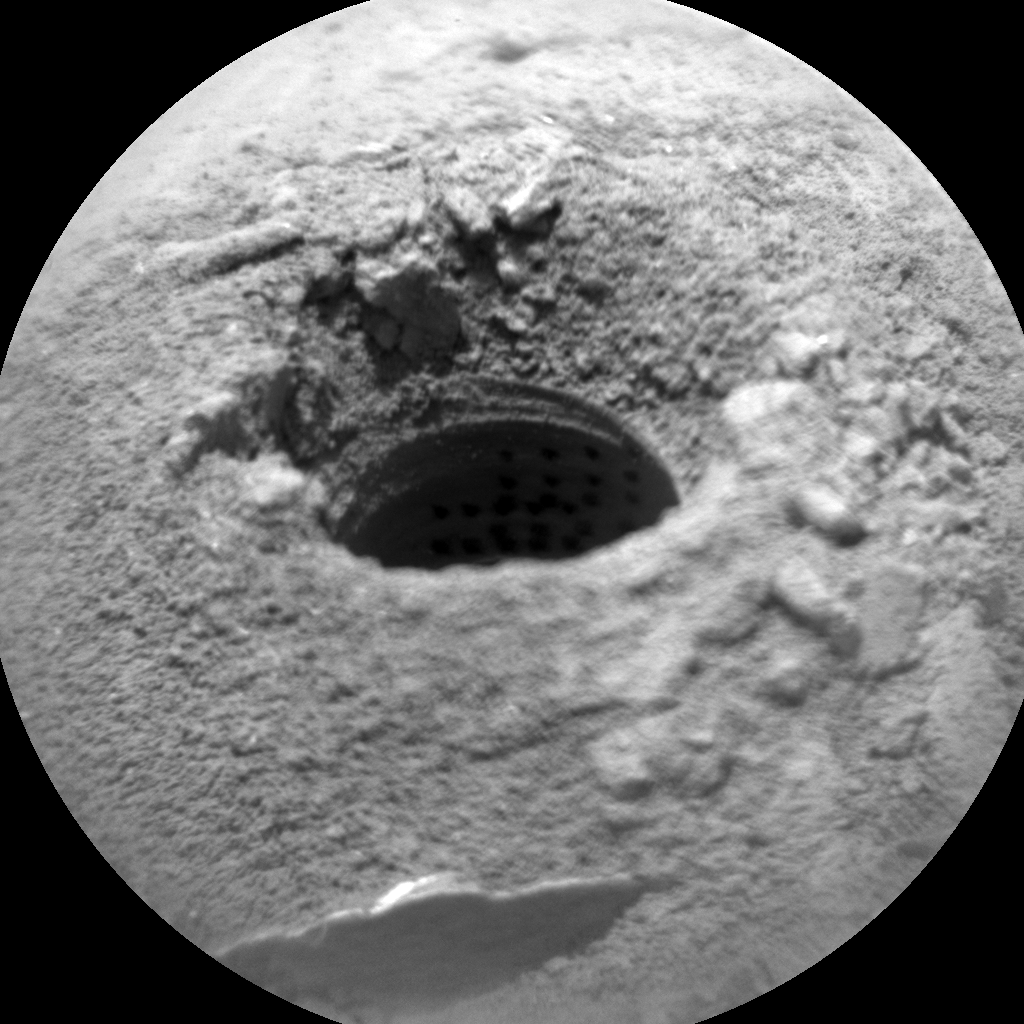
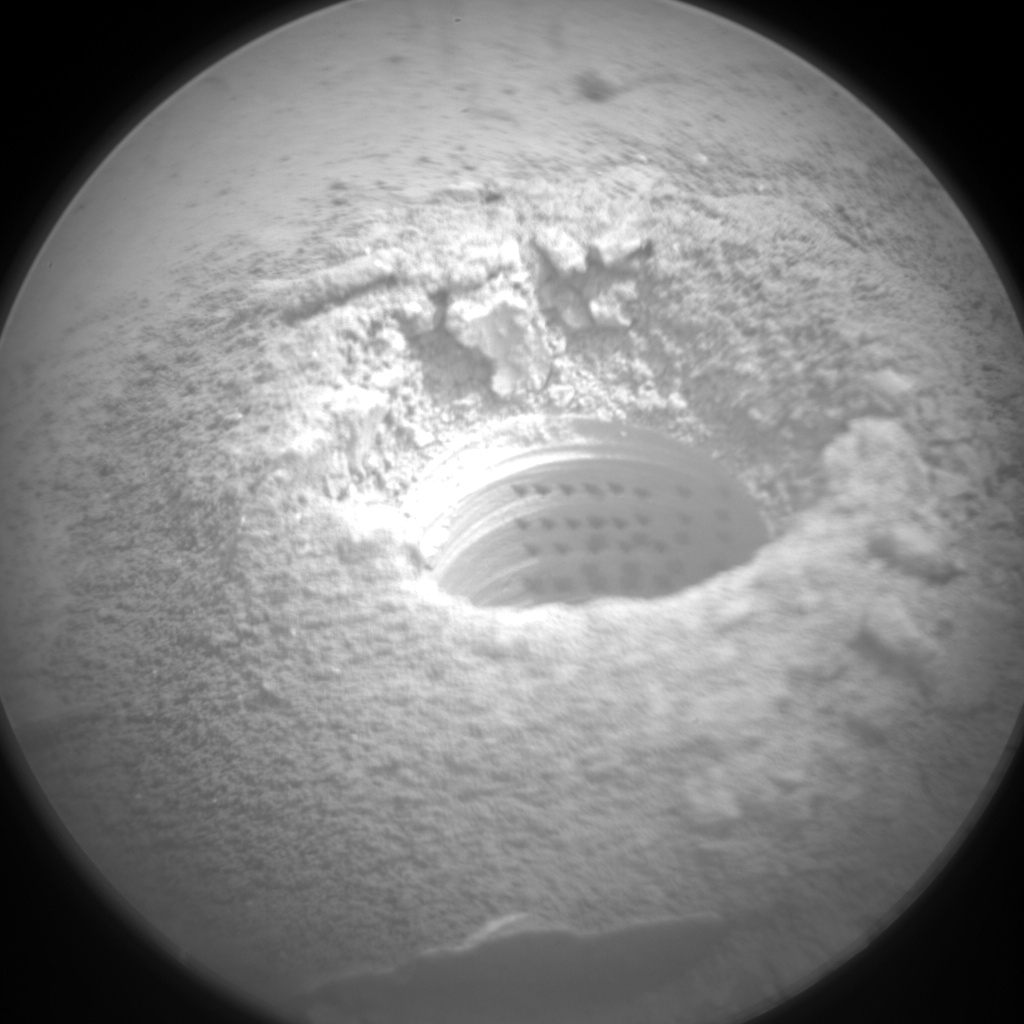
Laser strikes within Duluth drill hole. Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 2075, June 8, 2018.
Credit: NASA/JPL-Caltech/LANL
NASA’s Curiosity Mars rover is now in Sol 2076, ready to tackle a weekend of duties.
Reports Rachel Kronyak, a planetary geologist from the University of Tennessee in Knoxville, the weekend plan has two main priorities: perform another analysis with the robot’s Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) on the Duluth drill sample and continue a campaign of dust storm monitoring.
Dust storm
There’s a dust storm developing on the other side of Mars. In response, the environmental group has planned a suite of activities to monitor how the amount of dust in the atmosphere will change over the next few sols.

Dust storm watching. Curiosity Mastcam Left image taken on Sol 2070, June 3, 2018.
Credit: NASA/JPL-Caltech/MSSS
“To measure dust in the atmosphere, we’ll first point Mastcam towards the sun and take a tau measurement, which lets us determine the optical depth vertically. Then we’ll take a Mastcam image of the crater rim to determine line-of-sight extinction, which is directly related to the amount of dust present,” Kronyak explains. In addition, a few movies using Curiosity’s Navcam are to be taken, to assess clouds, wind direction, and to look for dust devils.
Duluth drill hole
“Overnight on Sol 2076-2077, we’ll perform our third CheMin analysis on the Duluth drill sample. Our geology theme group planned some additional activities later in the day on Sol 2077 to support our assessment of the Duluth drill hole,” Kronyak adds, including a Chemistry and Camera (ChemCam) Laser-induced Breakdown Spectroscopy (LIBS) raster of the drill hole and several change detection Mastcam images.
“Whenever Curiosity is parked at a location for more than a few sols, we commonly take a series of these change detection images to systematically look for material that has moved. We’ll also do a LIBS observation on the nearby rock target “Isanti” and perform a routine check-up on the Mastcam instrument with a sky column observation,” Kronyak concludes.
Over the next ten years, more than 6,000 smallsats are expected to launch. That’s an over six-fold increase from the previous decade. As the smallsat market grows, launch remains the main bottleneck to timely and affordable access to space.
The Aerospace Corporation’s Center for Space Policy and Strategy (CSPS) released a new policy paper today that explores the benefits of Launch Unit standards for smallsats.
Straightforward access
The authors’ proposed standard configurations, like the Launch Unit, would enable straightforward access to launch vehicles, cargo, and satellites, leading to standard schedules and known pricing.
Currently, most smallsats are launched as secondary payloads when there is excess space in a launch vehicle. In addition, every deployment must be specifically designed for each smallsat. The capabilities and agility of the smallsat industry would be greatly enhanced by the implementation of a smallsat launch standard.

Credit: LASP/NASA/GeoOptics
Launch standard
This standard would address the physical properties of the smallsat (size, volume, vibrational modes) as well as the mechanical and electrical connections to the launch vehicle.
This paper explores the benefits of defining a launch standard for medium-class (25-200 kilogram) smallsats and provides options for its development.
To view the paper — Setting the Standard: Launch Units for the SmallSat Era — go to:
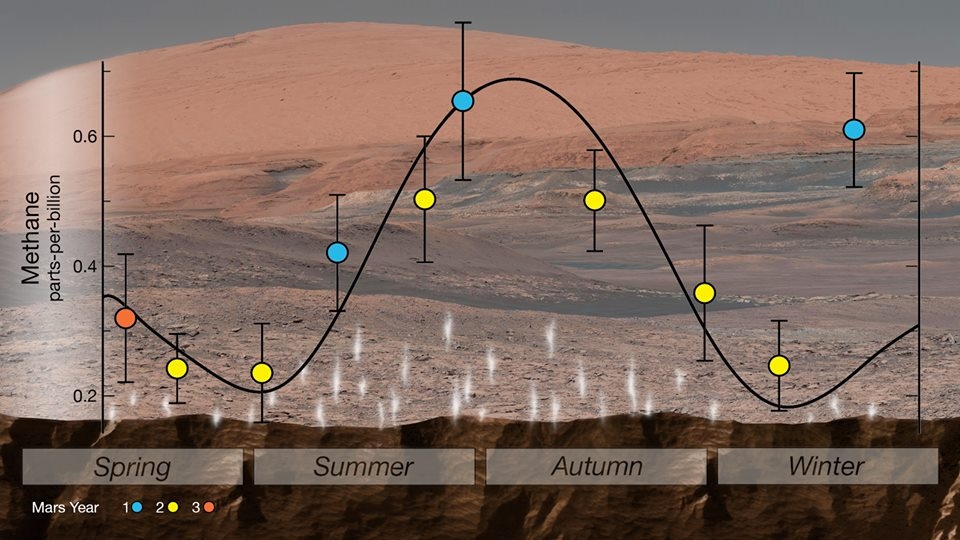
NASA’s Curiosity rover has found new evidence preserved in rocks on Mars that suggests the planet could have supported ancient life, as well as new evidence in the Martian atmosphere that relates to the search for current life on the Red Planet. While not necessarily evidence of life itself, these findings are a good sign for future missions exploring the planet’s surface and subsurface.
BTW: Follow the money…follow the water…follow the methane!
A biological signature for the methane is not ruled out.
“Are there signs of life on Mars?” said Michael Meyer, lead scientist for NASA’s Mars Exploration Program, at NASA Headquarters. “We don’t know, but these results tell us we are on the right track.”

Credit: NASA/JPL-CALTECH
Next steps
Carnegie Institution’s Andrew Steele was a key member of the research team, whose work on this project built off his discovery six years ago of indigenous organic carbon in 10 Martian meteorites. The organic molecules he found in 2012 are comparable to those found by Curiosity.
Steele says that the next steps must be looking for organic compounds that are released from the rock samples at lower temperatures.
“The next target is material that comes out when heated to less than 600 degrees Celsius, which is where the molecules are that will provide evidence of biological activity or the kinds of abiotic chemistry that could give rise to life,” Steele said.
Go to Science magazine at:
http://www.sciencemag.org/news/2018/06/nasa-rover-hits-organic-pay-dirt-mars
Also:
http://science.sciencemag.org/content/360/6393/1096.full

Given a revitalization of interest in lunar exploration, work is underway to develop a navigation system for the Moon that scales with increasing demand and can be utilized by government and commercial space missions.
Advanced Space LLC of Boulder, Colorado announced today it signed a two-year contract with NASA to continue development of a cislunar-centric navigation system.
A Cislunar Autonomous Positioning System (CAPS) is a public-private partnership to enable robust cislunar activities.
Space: a busy place
“As we increase the number of vehicles in space and missions to the Moon, we must equally advance the technology used to figure out where they are and where they are going,” said Bradley Cheetham, CEO of Advanced Space. “As space becomes busier, we are working to reduce the cost and congestion associated with mission planning and operations.”
This new contract builds on a six-month Phase I effort supported by NASA and the next two years will focus on the detailed technical development of required software and supporting systems. Key milestones coming up will include technical interface meetings and reviews with interested potential users, be they NASA, commercial, or international, explains a company press statement.

Credit: NASA
Matching grant
Advanced Space also received a matching Advanced Industries Accelerator Grant for $250,000 from the Colorado Office of Economic Development and International Trade in May 2018 to support the development of this technology within the state.
Advanced Space supports the exploration, development, and settlement of space through software and services that leverage unique subject matter expertise to improve the fundamentals of spaceflight.
For more information on this creative space firm, go to:

