Archive for the ‘Space News’ Category

Mars 2020 rover is a first step in bringing back specimens from the Red Planet to Earth.
Credit: NASA/JPL
A just-released study recommends that NASA should update policies that protect planets and other solar system bodies during space exploration missions.
The current process for planetary protection policy development is inadequate, the report explains, and also notes that private-sector space exploration activities are another reason why planetary protection policies need re-examination.
The new report comes from the National Academies of Sciences, Engineering, and Medicine.
Wanted: Strategic plan
The report — Review and Assessment of Planetary Protection Policy Development Processes — calls for NASA to develop a planetary protection strategic plan, assess the completeness of policies, and initiate a process to formally define requirements that are missing.
NASA should also identify a strategy for dealing with major policy issues, the report adds, such as sample-return from and human missions to Mars and private-sector solar system exploration missions.

Humans on Mars – the reach for the Red Planet.
Credit: Boeing
Mars, icy moons
Spotlighted in the report are Mars Sample Return and exploration campaigns to the icy moons of Jupiter and Saturn.
Furthermore, NASA does not currently have a planetary protection policy in place regarding human exploration to Mars, which could take place in the 2030s. Moreover, the current U.S. government process to oversee samples returned from Mars and elsewhere dates back to the Apollo era – a process that is out of date.

Apollo-era back-contamination policies are out of date.
Credit: NASA
Tesla tossing
In terms of commercial space exploration, there is no regulatory agency within the U.S. government with the authority to regulate space exploration by non-government entities. Legislation should be proposed that grants authority to an appropriate federal regulatory agency to authorize and supervise private sector space activities, the report says.

Tesla tossing: planetary protection implications.
Credit: SpaceX
Flagged in the report as a current example of this concern is the SpaceX Falcon 9 Heavy booster tossing of a used Tesla roadster into a Mars-crossing orbit. To the best of the committee’s knowledge that wrote the report, no consultations as to the test’s planetary protection implications took place.
To read the report — Review and Assessment of Planetary Protection Policy Development Processes – go to:

Exploration Vessel Nautilus.
Credit: Ocean Exploration Trust
Update July 3: Preliminary Findings from the Nautilus Meteorite Hunt
“In July 2018, Exploration Vessel Nautilus attempted to locate and recover fragments of a rare, large meteorite fall that was recently observed in NOAA’s Olympic Coast National Marine Sanctuary off the coast of Washington.

Credit: Ocean Exploration Trust
An overnight multibeam sonar survey on July 1 attempted to identify possible meteorite impact locations, but no obvious changes to the seafloor were observed.
On July 2, robot underwater vehicles, Hercules and Argus, were launched to conduct a 7-hour visual survey of the seafloor in a region identified to likely include the impact site.
While exploring this area, the Nautilus team collected several sediment samples using a suction hose sampler, magnetic plate, and sediment scoop. Upon recovering the vehicles, the team spent about six hours in the ship’s wet lab sifting and processing through these silty samples.

Credit: Ocean Exploration Trust
NASA Cosmic Dust Curator Marc Fries conducted an initial visual analysis of the samples collected, and his preliminary findings include two small fragments of fusion crust–meteorite exterior that melted and flowed like glaze on pottery as it entered the atmosphere.
Additional analysis will be conducted in the coming weeks to determine if these fragments indeed came from the massive meteorite fall seen entering the Pacific Ocean off Washington’s coast in March 2018.”
According to the expedition team, they will continue to post updates on this exciting research as they learn more.
Fall guy
On March 7, 2018, a bright meteorite (called a bolide) fall was observed about 15 miles (25 kilometers) off the coast of Grays Harbor County, Washington.
Ocean Exploration Trust is worked with scientists from Olympic Coast National Marine Sanctuary, NASA, and University of Washington to locate the meteorite fall.
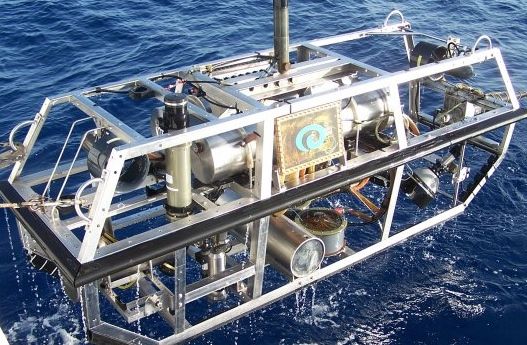
Remotely operated underwater vehicles scoured ocean floor.
Credit: Ocean Exploration Trust
Underwater vehicles
Exploration Vessel Nautilus mapped a 1 square kilometer area, and then conducted a search of the area with remotely operated underwater vehicles — Hercules and Argus — and recover any fragments located.
Support for this expedition comes from NOAA’s Office of Ocean Exploration and Research, Ocean Exploration Trust, and National Geographic Society.
Sea floor site
An analysis by NASA Cosmic Dust Curator Marc Fries, who is onboard Nautilus for the expedition, indicated this fall is approximately two tons of meteorites. Fries estimated that, at the fall site for the largest meteorite, there may be two to three meteorites for every 10 square meters of sea floor.
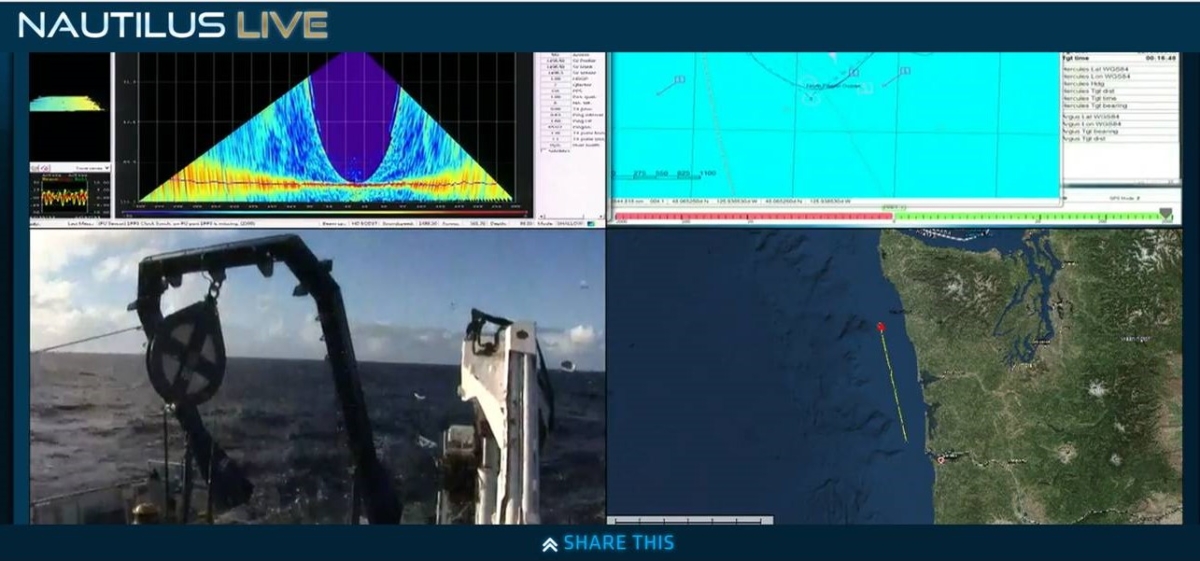
Expedition was broadcast for public viewing.
Credit: Nautilus Live/Screengrab
If meteorite fragments are found they will be shipped to the Smithsonian Institution in Washington, D.C. and become part of their research collections.
A remotely operated vehicle (ROV) dive will occur on July 2, 2018, from approximately 9am-4pm Pacific Time (weather dependent).
The public can explore with the Nautilus team in real-time on Nautilus Live!
Go to: www.nautiluslive.org
Also, go to this informative video about the meteorite hunt at:

Pre-launch photo of Opportunity at Kennedy Space Center, Florida.
Credit: NASA
That thick dust storm on Mars continues. The storm caused NASA’s Opportunity rover at Meridiani to suspend science operations.
The Martian dust storm began on May 30.
Latest status
What’s the latest status on the solar-powered Opportunity rover, now in Sol 5132?
“We have not heard from the rover for a couple of weeks,” explains Ray Arvidson of Washington University in Saint Louis. He is deputy principal investigator for the Mars Exploration Rovers – Opportunity and Spirit.
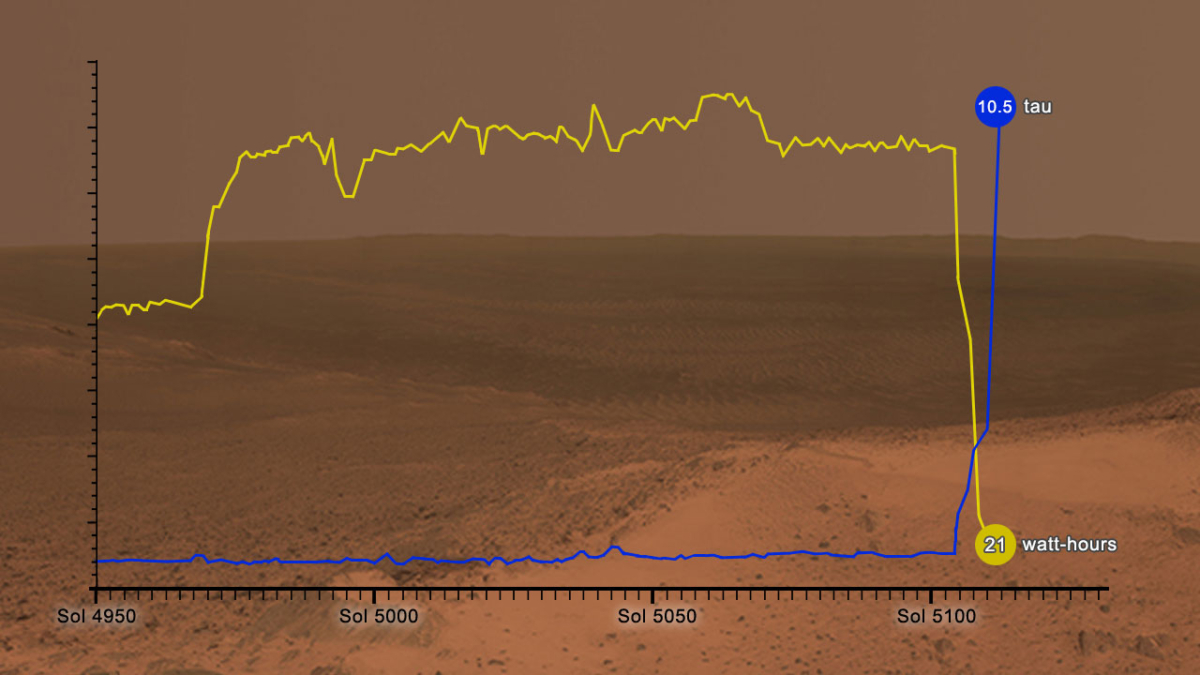
This graphic shows how the energy available to NASA’s Opportunity rover on Mars (in watt-hours) depends on how clear or opaque the atmosphere is (measured in a value called tau).
Credit: NASA/JPL-Caltech/New Mexico Museum of Natural History
Spirit has long been silent, becoming bogged down in sand late 2009. Its last communication with Earth was sent on March 22, 2010.
Opportunity has been wheeling and dealing with Mars since it landed in Meridiani Planum on January 25, 2004. But the rover’s last image received on Earth was from its Panoramic Camera, way back on Sol 5111.
Getting back to full operation
Most likely Opportunity is in a low power mode “in which the rover wakes up, checks its power, and if too low just goes back to sleep again,” Arvidson told Inside Outer Space.

Graphic shows the ongoing contributions of NASA’s rovers and orbiters during a Martian dust storm that began on May 30, 2018. Not shown is Europe’s ExoMars Trace Gas Orbiter and Mars Express, also active circling the Red Planet, as is India’s Mars Orbiter Mission.
Credit: NASA/JPL
“At some point as the storm subsides Opportunity should wake up, decide it has enough power to transmit a signal from its low gain antenna saying ‘I am awake and ok, but I am going back to sleep again.’ This should happen every sol until it decides to go back to full operation,” Arvidson adds.
“We have been listening but no low-gain antenna communications yet. And the storm continues in full force,” Arvidson says.
“The storm has gone global and is still raging. Three weeks today since we last heard from Opportunity,” adds Jim Rice, Geology Team Leader for the Mars Exploration Rover Project at the Arizona State University’s Mars Space Flight Facility. “I’m still confident we make it through this.”
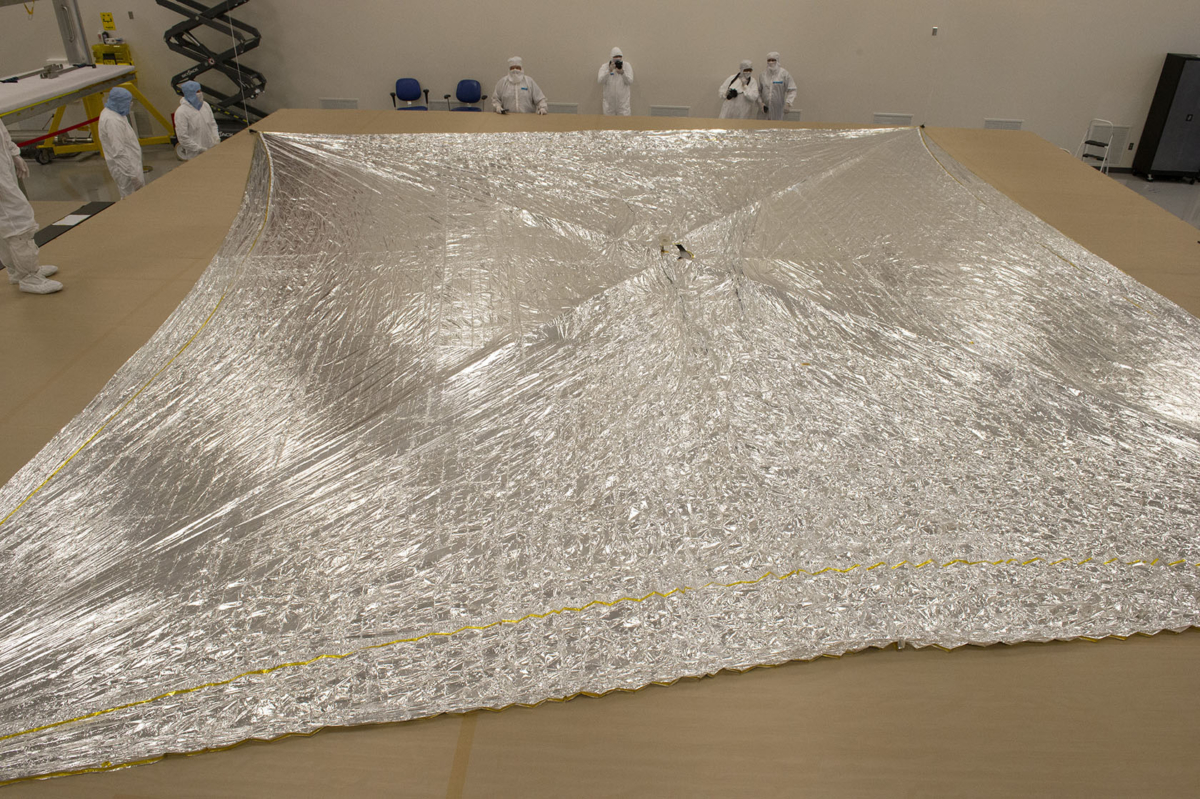
Solar sail test to be utilized by the Near-Earth Asteroid Scout (NEA Scout).
Credit: NASA/Emmett Given
A solar sail to be used in NASA’s Near-Earth Asteroid Scout has been deployed in a ground test facility.
The test was performed in an indoor clean room at the NeXolve facility in Huntsville, Alabama.
The Near-Earth Asteroid Scout (NEA Scout) is a small satellite designed to study asteroids close to Earth. The successful deployment test took place on June 28.
Six-unit cubesat
NEA Scout is a six-unit CubeSat that relies on a solar sail for propulsion. It is one of 13 secondary science payloads NASA selected to fly on NASA’s Exploration Mission-1 (EM-1).
EM-1 will be the first integrated test of NASA’s Space Launch System rocket, NASA’s Orion spacecraft and the newly upgraded Exploration Ground Systems at Kennedy Space Center in Florida.

Deep space destination
In addition to testing these integrated systems, EM-1 will also provide the opportunity for these small experiments to reach deep space destinations, conducting science missions and testing key technologies beyond low-Earth orbit.
NEA Scout will deploy from the rocket after the Orion spacecraft is separated from the upper stage. When deployed, the sail, which is square in shape, with each side about the length of a school bus, will harness the light of the sun to use as propulsion to move through space.
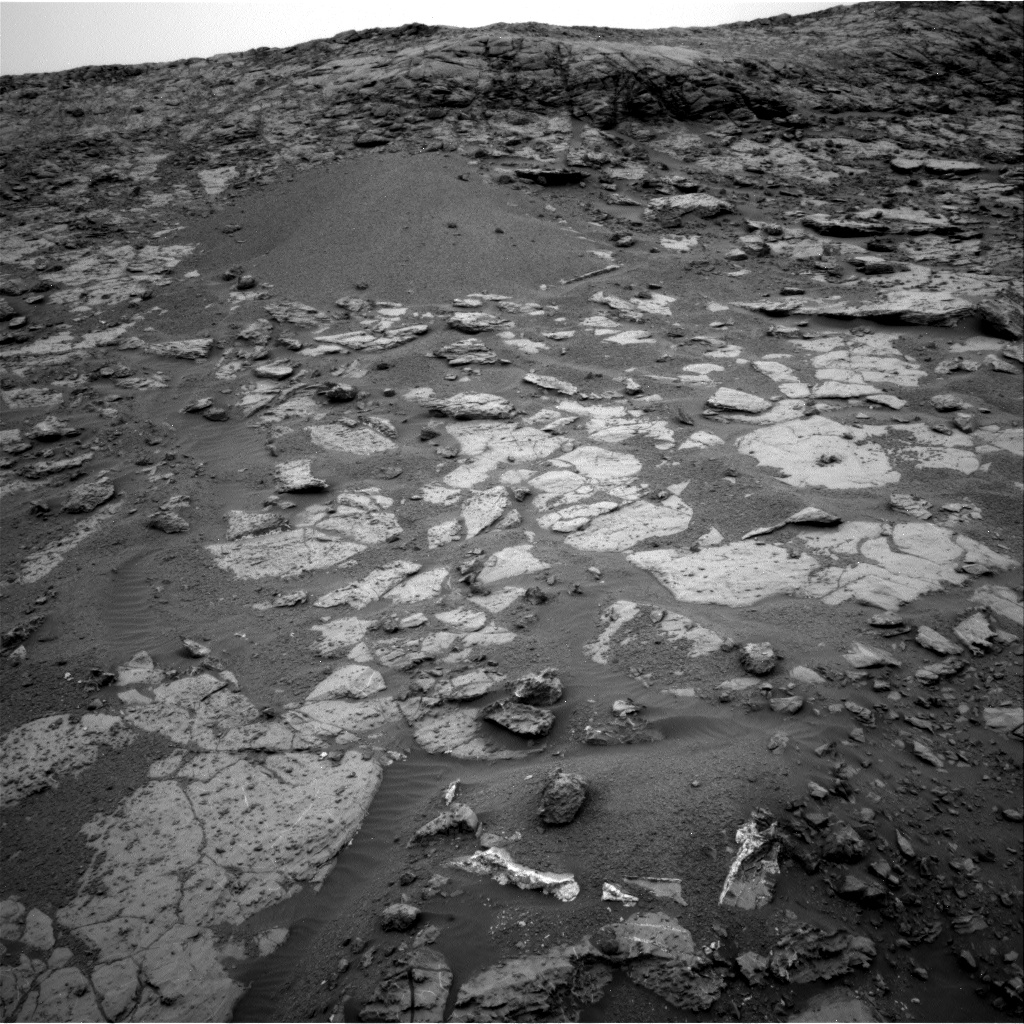
Curiosity Navcam Right B image acquired on Sol 2095, June 28, 2018.
Credit: NASA/JPL-Caltech
Now performing Sol 2096 duties, NASA’s Mars Curiosity rover has made a steep drive on Sol 2094 and is back over the crest of Vera Rubin Ridge and enjoying the view of flatter terrain ahead.
That’s the report from Lauren Edgar, a planetary geologist at the USGS in Flagstaff, Arizona.
“Everything was going smoothly and we were excited to plan some potential contact science, until we found a rock under the left front wheel that might make Curiosity unstable during arm activities,” Edgar explains.
Weekend plan
At the last minute Mars scientists swapped out Mars Hand Lens Imager (MAHLI)
MAHLI and Alpha Particle X-Ray Spectrometer (APXS) activities for some additional remote sensing.
“We still packed a lot of science into the two-sol plan, and we’ll have another opportunity to do contact science in the weekend plan,” Edgar explains.
The first sol plan included a Chemistry and Camera (ChemCam) and Mastcam observations of “Crosby” and “Hekkla Lake” to characterize the bedrock at this location.
“This plan is also full of atmospheric observations to monitor the ongoing dust storm, which will provide some great data from the surface regarding this unique event,” Edgar adds.
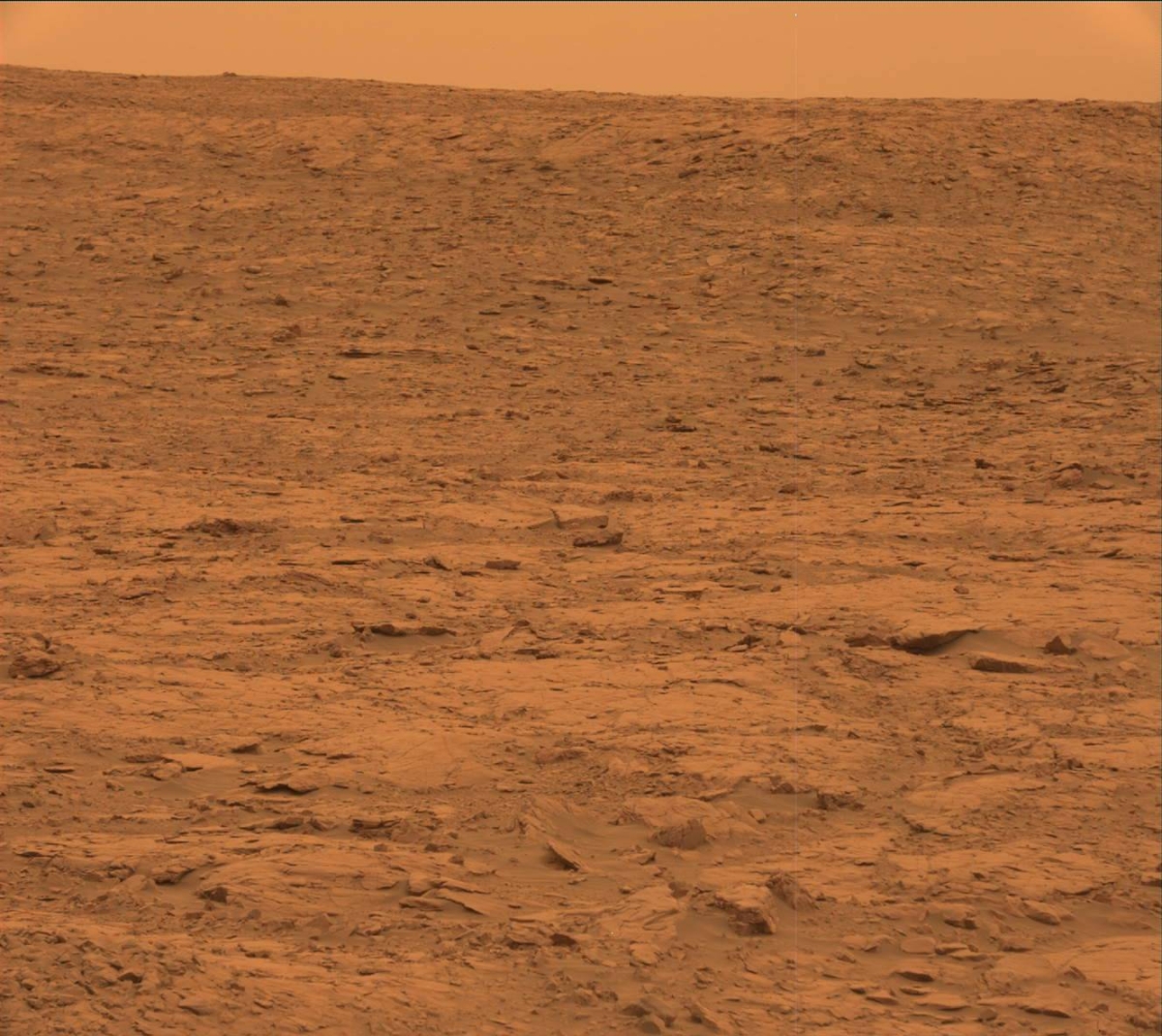
Curiosity Mastcam Left image acquired on Sol 2094, June 27, 2018.
Credit: NASA/JPL-Caltech/MSSS
Rover deck
“We also planned Mastcam imaging of the rover deck to monitor the accumulation and movement of fine material,” Edgar continues, “as well as a number of ChemCam calibration activities under high atmospheric opacity conditions.”
The plan calls for the robot to continue driving to the south and it will acquire post-drive imaging to prepare for the weekend plan.
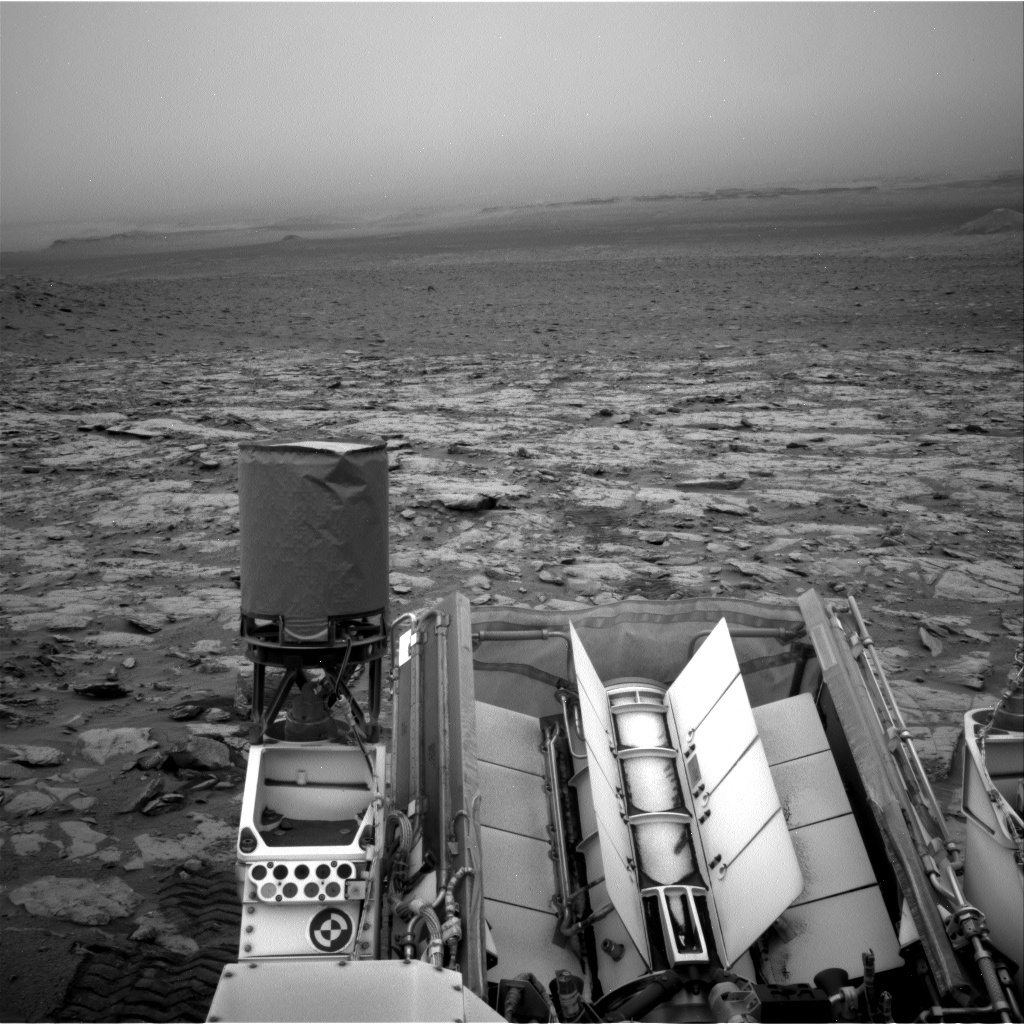
Curiosity Navcam Right B image acquired on Sol 2095, June 28, 2018.
Credit: NASA/JPL-Caltech
Hoping for clear skies
Overnight, the rover’s Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) was slated to carry out the last analysis of the Duluth drill sample.
A second sol plain outlined more atmospheric monitoring and calibration activities, along with a ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observation to autonomously target bedrock in the rover’s new location.
“Hoping for clearer skies,” Edgar concludes, “and fewer loose rocks under our wheels!”
New map!

Credit: NASA/JPL-Caltech/Univ. of Arizona
Meanwhile, a new Curiosity Rover location map for Sol 2094 has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2094 Martian day, or sol, of the rover’s mission on Mars (June 28, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. From Sol 2092 to Sol 2094, Curiosity had driven a straight line distance of about 114.27 feet (34.83 meters).
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 11.91 miles (19.17 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Artist’s view of the James Webb Space Telescope (JWST) in space, up and operating tackling a full agenda of space science conquests.
Credit: Northrop Grumman
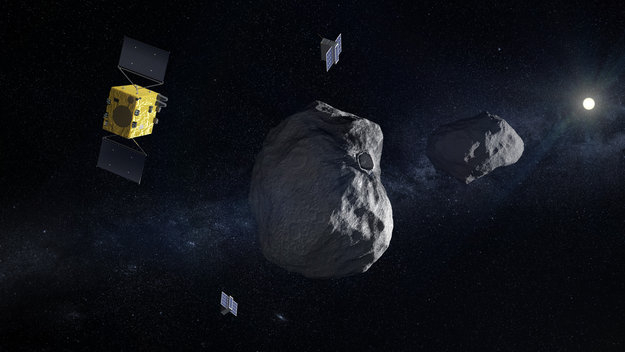
Hera mission is part of an international cooperation aimed at testing whether the orbit of an asteroid can be shifted by smashing into it.
Credit: ESA
The European Space Agency is working with NASA on a double-spacecraft mission – a test of how to deflect an asteroid.
Called Hera, named for the Greek goddess of marriage, this candidate mission is up for consideration during the Agency’s Council of Ministers at European Level in late 2019.
Dart
In 2022, NASA’s Double Asteroid Redirection Test (DART) spacecraft will first perform a kinetic impact on the smaller of the two bodies of the Didymos binary near-Earth asteroids. Then Hera will follow-up with a detailed post-impact survey that will turn this grand-scale experiment into a well-understood and repeatable planetary defense technique.
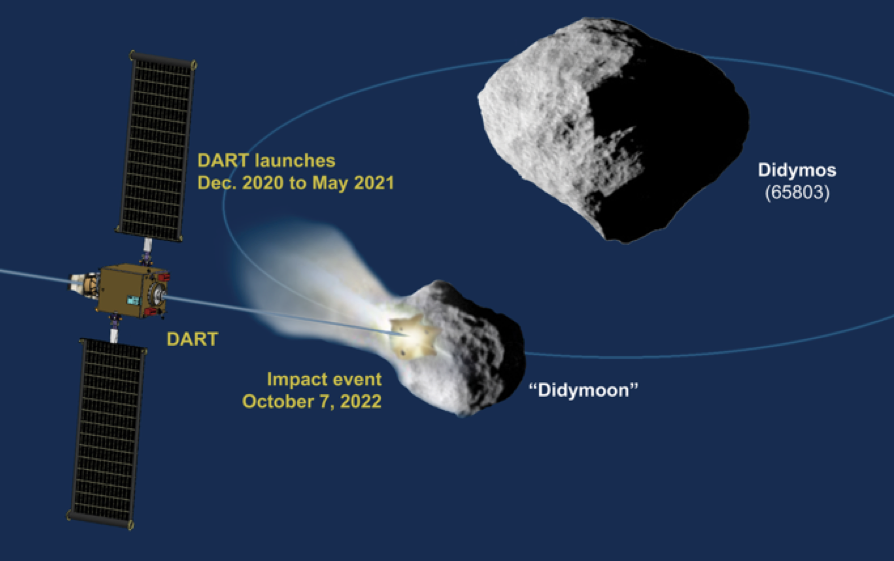
These objects will come a comparatively close 7 million miles (11 million kilometers) to Earth in 2022.
Didymoon
The 800-meter diameter Didymos is orbited by a 170-meter “moonlet” informally called “Didymoon.” That smaller object is more typical of the size of asteroids that could pose a more common hazard to Earth.
Hera will also gather crucial scientific data on asteroids as a whole by carefully studying the exterior and interior properties of both bodies in the system.
The ESA-provided spacecraft will also host two 6-unit cubesats that will be deployed near Didymos to perform, for the first time ever, multi-point measurements in a “mother-daughter” configuration.
Close-proximity operations
A novel intersatellite link will be used to establish a flexible communications network supporting the close-proximity operations in very low-gravity conditions, a crucial step for future exploration activities around small bodies.
For a video of this asteroid deflection mission, go to:
http://www.esa.int/spaceinvideos/Videos/2018/06/Hera_mission2

Asteroid Day is a UN-sanctioned global awareness campaign. This year thousands of self-organized events will be hosted around the world. Join our Asteroid Day LIVE broadcast, 48 hours of content and commentary from around the world.
Stellar lineup
Hosted by Professor Brian Cox, he will be joined by astronauts, experts and celebrities. Asteroid Day is a global program supporting thousands of independently organized events on June 30th, provides online educational asteroid resources 365 days a year and produces a 24-hour global broadcast with an all-star lineup called Asteroid Day LIVE from Luxembourg.

Asteroid Day is held on June 30 each year to mark the date of Earth’s largest asteroid impact in recorded history, the Siberia Tunguska event, which devastated over 2,000 km2 of forest in 1908
Check out these websites at:
https://asteroidday.org/#guests
Also, go to this informative video at:
In case all you bright-eyed sky watchers missed it, a verdict on the James Webb Space Telescope via an external independent review board now finds the JWST a tad behind: Now March 2021.
Rejoice in this overview by the NASA chief, Bridentstine:
Background resources
To read a recent Government Accountability Office (GAO) review of JWST, go to this Highlights Page at:
https://www.gao.gov/assets/700/690412.pdf
No doubt, Webb will be the world’s premier infrared space observatory and the largest astronomical space science telescope ever built.
But it has been a long saunter down the infrared carpet for the telescope.
Integration delays
NASA has previously announced that JWST’s launch would be delayed several months, from October 2018 to no later than June 2019, because components of the telescope are taking longer to integrate than planned.
Take a look at my Scientific American story for details about the JWST:
Is the James Webb Space Telescope “Too Big to Fail?” – Backers of NASA’s next great observatory contemplate its worst-case scenarios
https://www.scientificamerican.com/article/is-the-james-webb-space-telescope-too-big-to-fail/
For a video look at JWST, go to the Northrop Grumman overview published on Jan 24, 2017 at:
Credit: Black Swift Technologies
Black Swift Technologies, a Boulder, Colorado-based firm, has been awarded a NASA contract to develop an aerial vehicle for atmospheric observations of Venus.
“Black Swift Technologies has provided aerial solutions for wild land fires, volcanic observations, tornadoes, and hurricanes—some of the most extreme phenomena on Earth,” explains Jack Elston, CEO of the company. “This mission is a natural extension of our focus, only now we are concentrating on the extreme conditions of Venus.”
Dynamic soaring
As a specialized engineering firm, Black Swift Technologies (BST) provides purpose-built scientific aerial platforms. BST is proposing a planetary aerial vehicle based on dynamic soaring, a proven method to extract energy from atmospheric shear that has propelled the fastest small-scale aircraft in the world, and provided the energy necessary for long-endurance low-level flights of birds across oceans.

A composite image of the planet Venus as seen by the Japanese probe Akatsuki. The clouds of Venus could have environmental conditions conducive to microbial life.
Credit: JAXA
“Our solution will be designed to not only survive in the harsh wind environment, but also simultaneously perform targeted sampling of the atmosphere while continuously extracting energy, even on the dark side of the planet,” Elston points out in a press statement.
Upper atmosphere
Despite the fact that the surface temperature of Venus is hotter than any other planet in the Solar System at 467°C, the atmospheric pressure and temperature at about 30 miles (50 kilometers) to 40 miles (65 kilometers) above the surface of the planet is nearly the same as that of the Earth.
That makes the planet’s upper atmosphere the most Earth-like area in the solar system, even more so than the surface of Mars.

Don Mitchell, a retired researcher, matched his computer science skills with a passion for old spacecraft data to reveal never-before-seen details in Soviet Union Venera-13 lander images.
Credit: Don Mitchell
Super rotation
The atmosphere of Venus is composed primarily of carbon dioxide and nitrogen and is much denser and hotter than that of Earth. The upper layer of Venus’ atmosphere exhibits a phenomenon of super-rotation, where the atmosphere circles the planet in just four Earth days.
The resulting winds blow at speeds up to 100 m/s (360 km/h or 220 mph). On the other hand, the wind speed becomes increasingly slower as the elevation from the surface decreases, with the breeze barely reaching the speed of 2.8 m/s (10 km/h) on the surface.
Founded in 2011, Black Swift Technologies offers unmanned aircraft systems (UAS) capable of flying scientific payloads in demanding atmospheric environments (high-altitude, corrosive particulates, and strong turbulence).

