Archive for the ‘Space News’ Category

Credit: JAXA/NHK
The Moon Village Association (MVA) has issued for review a set of Moon Village Principles.
Giuseppe Reibaldi, President of the Moon Village Association, stated in a press statement: “The Principles are the first concrete step in the implementation of the Moon Village concept and this is why they are important. The public will be able to relate the concept of the Moon Village with specific activities carried out in 2019, not in a distant future.”
In 2019, the MVA intends to produce other specific contributions to foster global cooperation for the Moon Village.

Credit: NASA
The Moon Village Association was created in 2017 as non-governmental organization based in Vienna. Its goal is the creation of a permanent global informal forum for stakeholders like governments, industry, academia and the general public interested in the development of the Moon Village.
General consensus
The Moon Village Principles represent a general consensus point-of-view of the Moon Village Association but are strictly non-binding.

Lunar base made with 3D printing
Credit: ESA/Foster + Partners
The MVA will assess annually the missions and activities of various organizations with respect to the “Moon Village Principles” and state in a highly public way whether or not those missions and activities are (or are not) in line with the Principles.
Principles
Principle 1: Adhere to applicable International Rules and Agreements dealing with human activities in space, such as the Outer Space Treaty of 1967 and others, and conduct peaceful activities with thoughtful consideration and respect for the cultural heritage of humanity on the Moon.
Principle 2: Improve Knowledge of the lunar environment and its use for scientific research.
Principle 3: Reduce the Cost and Risk of transport to and from Earth and the Moon, and within cis-Lunar space.
Principle 4: Support the Economic Development of the lunar community.

Shackleton Crater located on the south pole of the Moon. The Lunar Temple visible as bright dot on the left side.
Credit: Jorge Mañes Rubio/DITISHOE
Principle 5: Employ or establish and document open-source engineering Standards of broad applicability and/or usefulness.
Principle 6: Develop and build elements / systems that provide Critical Services for lunar missions and activities, such as navigation, communications, power, and resources.
Principle 7: Develop and demonstrate Technology enabling cost-effective, reliable and safe robotic and human operations on the Moon’s surface and surroundings.
Principle 8: Make available sufficient information to allow global cooperation and engagement involving the general public in the expansion of human activities to, and eventual settlement of the Moon.

Habitat modules are seen beside ‘garages’ for rovers, with an adjacent launch site. Note the robotic vehicles on the surface, proceeding with base construction.
Credit: RegoLight, visualization: Liquifer Systems Group, 2018/Used with permission.
Principle 9: Contribute ethically to human society in terms of Culture, the Arts, Education or other fundamentals.
For more information on the MVA and the set of principles, go to:

Credit: Marta Flisykowska
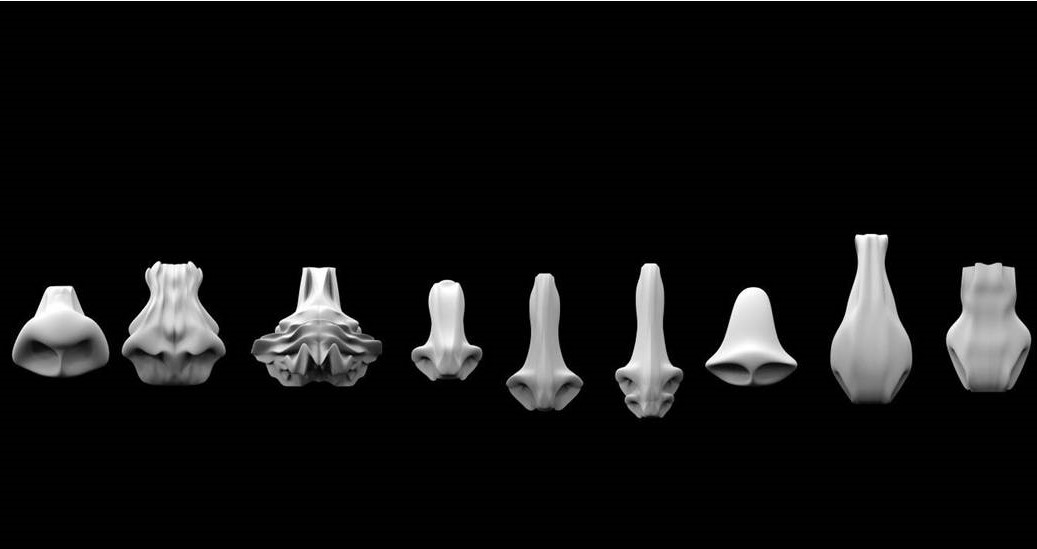
How could long-term habitation of Mars impact our bodies?
“I propose a futuristic vision of how our noses could look if we lived on Mars,” says Marta Flisykowska of the Academy of Fine Arts, Architecture and Design Faculty in Gdańsk, Poland.
Based on the “Who nose” project, Flisykowska has published an intriguing paper — Application of Incremental Technologies in Considerations of Transhumanist Aesthetics – within the pages of the Journal of Science and Technology of the Arts.
Tip of the iceberg
Let’s face facts.
Mars is not a hospitable planet: It’s a lot cooler than Earth; the atmosphere on Mars is very thin; the amount of solar energy entering its upper atmosphere is half of that entering Earth’s upper; atmosphere; the local pressure of carbon dioxide on the surface is 52 times higher than on Earth – and then there’s that different gravity attraction due to the size of the Mars.
“This is just the tip of the iceberg of problems that we will have to deal with if we want to create a habitat on Mars and realistically think about its colonization or a regular life there,” Flisykowska points out.
Credit: Marta Flisykowska
New physical conditions
“The human body will have to change if we are to adapt to new physical conditions. Are these the new challenges for medicine or a direction of evolution? Undoubtedly, environmental conditions affect the body and in the course of time, in line with the law of evolution, adapting to changes is inevitable,” Flisykowska says.
The “Who nose” project refers to the possibilities of 3D printing and plastic surgery in the context of challenges that we will all face, Flisykowska concludes. “It does not mean that people will grow such noses in an evolutionary way on Mars.”
Nosing around
But a nosey look at our own noses here on Earth, here are some face facts:
- The structure of the nose enables to warm up or cool down air adjusting it to the body temperature before it reaches the lungs;
- The nose also acts as a filter so that it catches small particles preventing them from reaching the lungs;
- The nose moisturizes air adding humidity to pre-vent the respiratory tract from drying;
- It strengthens and impacts one’s voice;
- It supports the sense of smell;
- It can attract and impact the biology of attraction
Aesthetic considerations
At this stage of “medical development”, Flisykowska says, humankind introduces many changes into our individual bodies, be they artificial eyes, mechanical prostheses, bypasses etc.

Credit: Bob Sauls – XP4D/Explore Mars, Inc. (used with permission)
“Both in literature and in pop culture, the image of extra-terrestrial creatures often extended to the point of kitsch,” Flisykowska notes. “However, in the context of aesthetic considerations it is worth recalling that the creators of fairy-tale creatures and humanoid characters based their creations on assumptions that concerned the environment they existed in.”
For a copy of this informative and speculative paper, go to:
https://dx.doi.org/10.7559/citarj.v10i3.568
Also, go to this video at:

IceWorm ascending an ice wall in the California Science Center in Los Angeles. Researchers used the frozen vertical surface as a testing ground for the robot before it went into the field.
Credit: NASA/JPL-Caltech
What do you need for exploration of icy worlds in our solar system – IceWorm of course!
Robotic work is underway that could lead to automaton treks to the frozen plains of Enceladus, Eruopa or Pluto, as well as the polar ice canyons of Mars.
The robot is the first of its kind designed to scale up icy cliffs; someday, the robot may take samples in places that scientists have never reached before.
IceWorm could crawl off a lander to scoop up samples deep in ice fissures for later scientific analysis.
Microbial life
Aaron Curtis, the lead designer behind IceWorm and a postdoctoral scholar at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California, detailed how IceWorm works at the recent American Geophysical Union (AGU) Fall Meeting 2018.

The ice-climbing robot IceWorm scales a scalloped wall of glacial ice in a cave at Mount St. Helens in August 2018.
Credit: NASA/JPL-Caltech
In an informative article by AGU’s Jenessa Duncombe in the group’s Eos Buzz newsletter, Curtis hopes that IceWorm will someday climb in the caves that inspired it. “I would be really interested to see a trip go back to Mount Erebus [in Antarctica] and explore a pristine cave where no one’s entered,” Curtis explains. He tested prototype robot “feet” with anchoring and ice sampling capabilities in fumarolic ice caves on Mt. Erebus in 2016.
“The caves that have higher levels of volcanic gases might be the ones that are more fertile for microbial life,” Curtis adds. “I would be very fascinated to see what lives in them.”
Inchworm science
The 1.4-meter robot is made of hollow aluminum tubes and rotary joints, holds on to the icy wall by nesting its two feet into the ice with steel alpinist screws.
To climb, the robot simply unscrews one foot, curls its body until the two feet are near each other, and refastens its free foot to the wall. It then unscrews the second foot, lengthens its body forward toward its destination, and screws back into the wall. It repeats the dance over and over, says Curtis, so that the robot “inchworms up the wall.”
Dexterous feet
IceWorm’s success lies in its dexterous feet. Each foot is outfitted with ice screws equipped with a pressure sensor that directs how hard to drill into the ice, striving for the right balance between rotation and forward thrust.
A 3-D rendering on the researchers’ computers shows IceWorm’s body position in real time and lets researchers drag its free foot to the next stop on the wall.

Base camp in the crater of Mount St. Helens in August 2018. Researchers explored the fumarolic ice caves to test IceWorm in action.
Credit: NASA/JPL-Caltech
Successful testing
In June 2018, an ice climbing robot inside firn caves and glacier caves of Mount St Helens. The crater area has been progressively covered by a layer of snow, firn, and glacier ice since as early as 1986.
After 8 hours of testing at Mount St. Helens, Curtis called it IceWorm’s first “successful test,” and he looks ahead to future development.
Curtis also brought an ice-climbing robot to Mount Rainier — the highest mountain in the U.S. state of Washington — this past July and August and demonstrated the success of robotic “hands” containing ice screws. He showed that the fasteners penetrated into the icy walls and ceilings of the fumarole caves, providing a grip strong enough to hold the robot and a backpack.

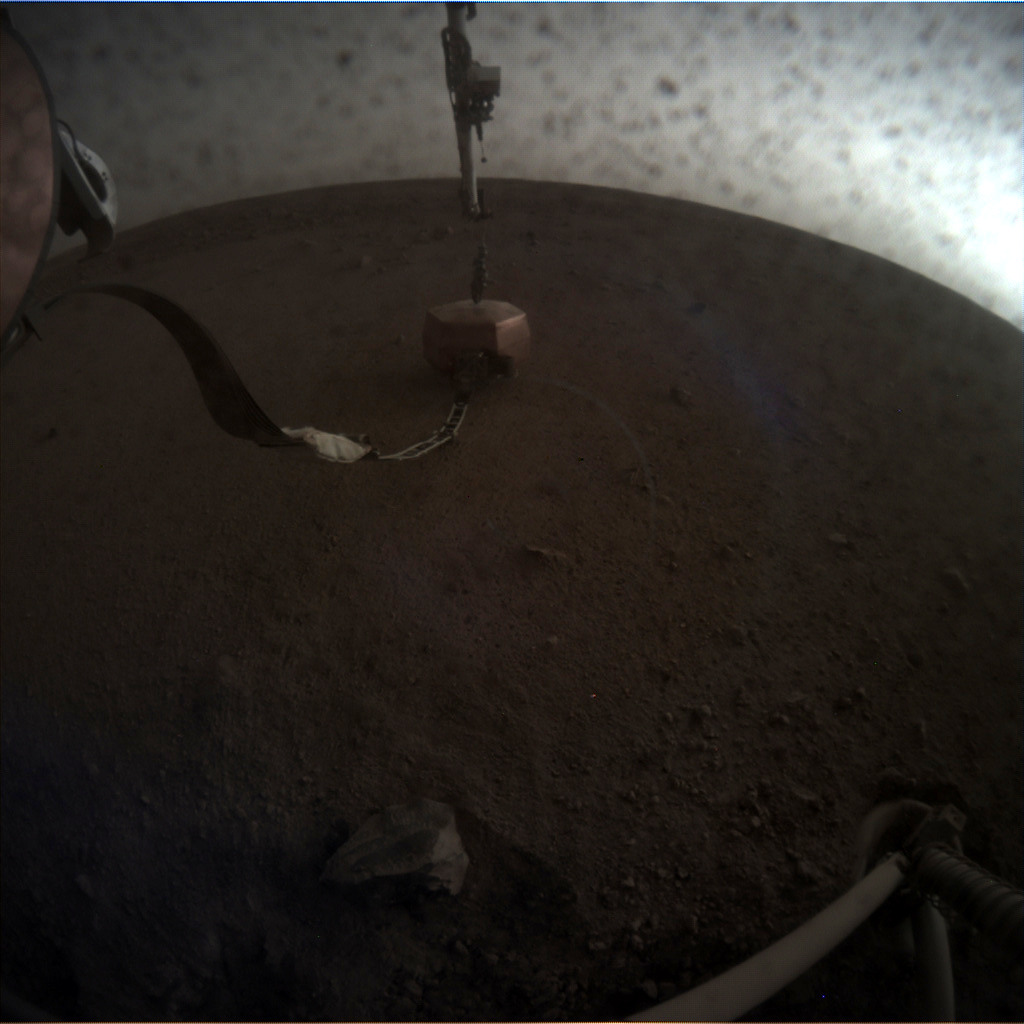
InSight Sol 26 image taken by Instrument Context Camera (ICC), acquired on December 23, 2018.
Credit: NASA/JPL-Caltech
NASA’s newest Mars lander is continuing to install on the Red Planet a set of scientific devices via its robotic arm.
New imagery shows the robotic arm departing the recently planted seismometer provided by France.
The InSight team worked on leveling the seismometer, which is sitting on ground that is tilted 2 to 3 degrees.

InSight Sol 26 image of tether taken by Instrument Deployment Camera (IDC) on December 23, 2018.
Credit: NASA/JPL-Caltech
Seismometer data flow
The first seismometer science data should begin to flow back to Earth after the seismometer is in the right position.
Also underway is adjusting the seismometer’s long, wire-lined tether to minimize noise that could travel along it to the seismometer.
Then, in early January, engineers expect to command the robotic arm to place the Wind and Thermal Shield over the seismometer to stabilize the environment around the sensors.

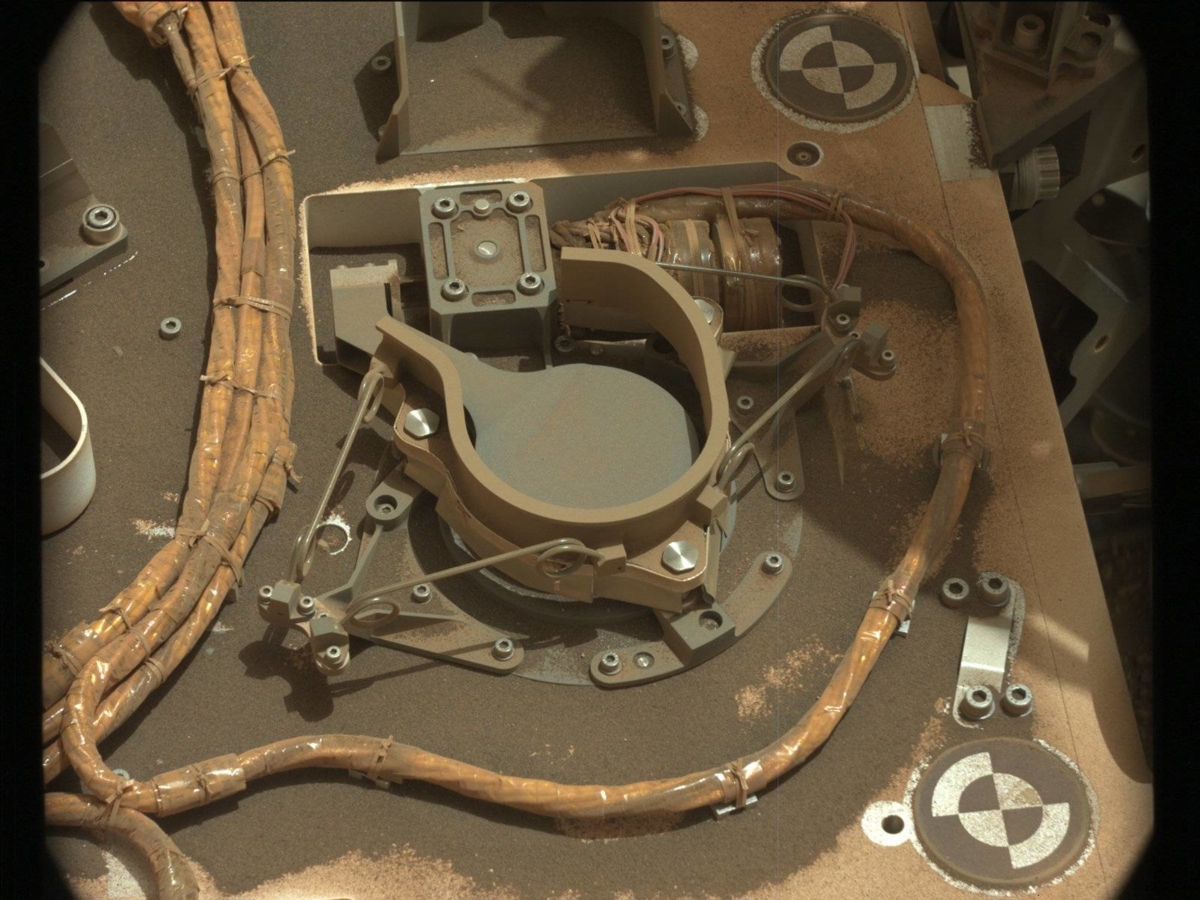
The wind and thermal shield (WTS).
Credit: Agence Idé/CNES).
Heat probe
Assuming that there are no unexpected issues, the InSight team plans to deploy Germany’s HP3 heat probe onto the Martian surface by late January.
HP3 will be on the east side of the lander’s work space, roughly the same distance away from the lander as the seismometer.
Wind shield
The wind and thermal shield (WTS) consists of an aerodynamically shaped aluminum cover with a honeycomb structure to which is attached a gold-coated thermal skirt.
The whole assembly rests on three legs that are to deploy automatically once the robotic arm lifts the dome off the lander’s platform.

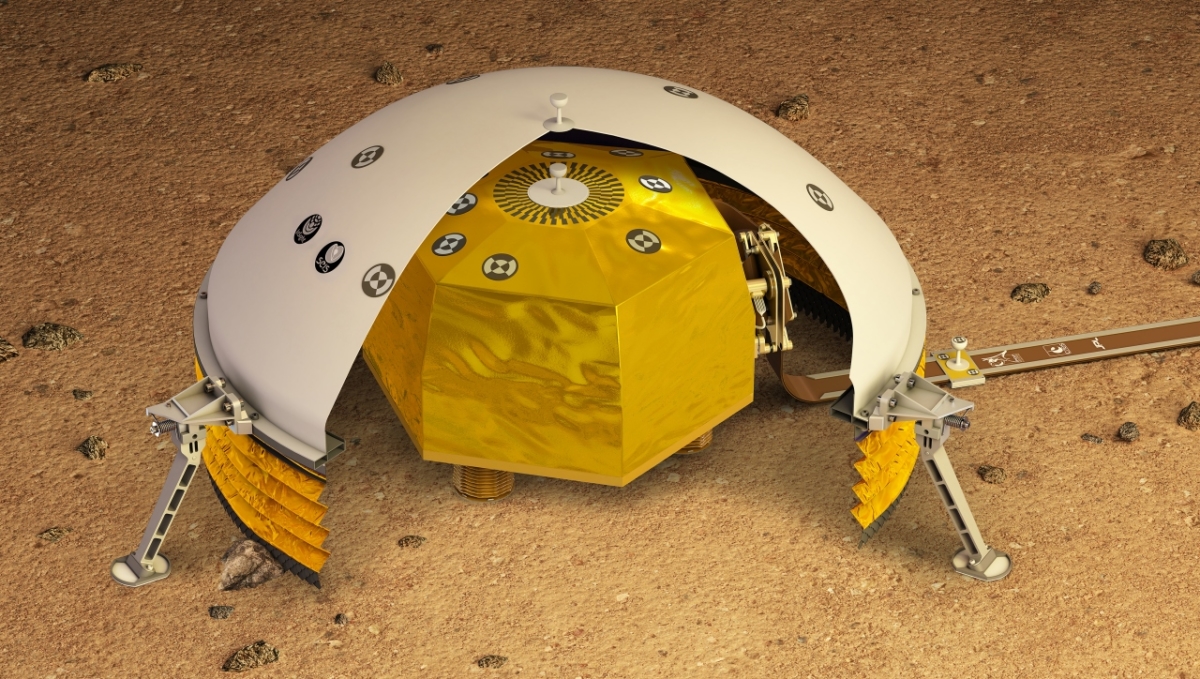
Artist concept showing the protective role of the wind and thermal shield (WTS) at the martian surface.
Credit: IPGP/David Ducros
The WTS will be brought to above the seismometer, now deployed on the ground, before being slowly lowered.
Despite its design, the WTS could be struck by violent gusts of wind or a dust devil, forces that might dislodge or even lift the dome, causing it to fly away.
The shield has nonetheless been developed to withstand squalls of 60 meters per second and should even be able to survive winds of 100 meters per second.

NASA’s Mars 2020 rover on the prowl and geared to collect and cache samples for future return to Earth.
Image Credit: NASA/JPL-Caltech
Exploration in our sights – the Moon, Mars, asteroids and elsewhere.
But is NASA ready to analyze extraterrestrial samples? A new study from the National Academies of Sciences, Engineering, and Medicine says no.
The U.S. space agency’s investment in new instruments to analyze extraterrestrial samples is “insufficient” to provide for replacement of existing instruments, says the report.

Mars Ascent Vehicle lifts off from Mars carrying soil samples.
Credit: NASA/ESA
Furthermore, if NASA does not invest additional funds into the replacement of current instrumentation and development of new technologies, technical staff support, and training for the next generation of analysts, current capabilities cannot be sustained, and the full scientific impact afforded by returned samples might not be realized, explains an Academies press statement.
One of the Apollo 16 sample boxes being opened in the Lunar Receiving Laboratory on Earth. The box contains a large rock and many small sample bags.
Credit: NASA/Johnson Space Center
Paramount importance
A major point: The United States possesses a treasure-trove of extraterrestrial samples brought to Earth by space missions over the past four decades.
Right now, there are two asteroid missions underway – Japan’s Hayabusa2 and NASA’s OSIRIS-Rex.
Both are expected to return asteroid samples in the 2020s, remnants from early in the formation of the solar system.

Japan’s Hayabusa2 is pulling up to Ryugu – a C-type asteroid – for detailed study.
Artwork: Akihiro Ikeshita
As the report observes, having the instrumentation, facilities, and qualified personnel to undertake analysis of returned samples, especially from missions that take up to a decade or longer from launch to return, is of paramount importance if NASA is to capitalize fully on the investment made in these missions.
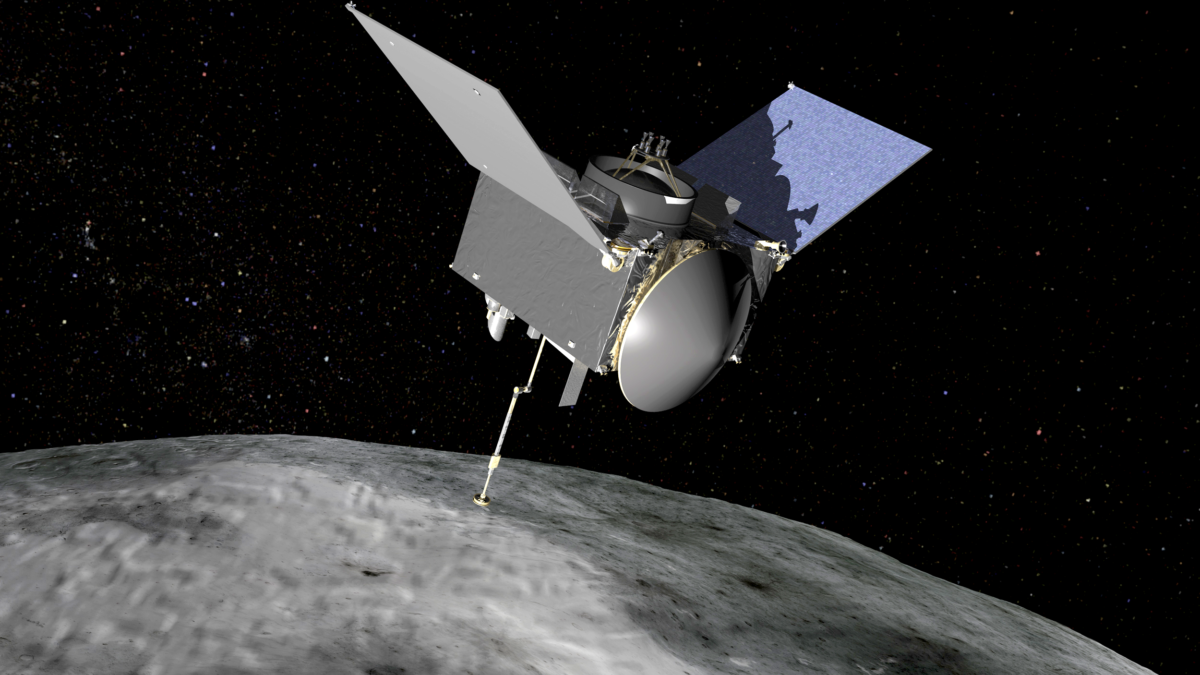
OSIRIS-REx spacecraft at Bennu.
Credit: NASA/University of Arizona
Another “now is the time”
According to Roberta Rudnick, chair of the committee that wrote the report and professor at the University of California, Santa Barbara: “Now is the time to assess how prepared the scientific community is to take advantage of these opportunities.”
Explains the report: Without changes in the funding program, currently robust analytical infrastructure for the study of extraterrestrial samples could suffer from attrition and the addition of new technological innovations could stretch current funding programs.
Wanted: significant investment
The just-issued report recommends that the NASA Planetary Science Division place high priority on investment in analytical instrumentation and curation sufficient to provide for both replacement of existing capacity and development of new capabilities.
Doing so will maximize the benefit from the significant investment necessary to return samples for laboratory analysis from asteroids, comets, the Moon, and eventually Mars and outer solar system moons.
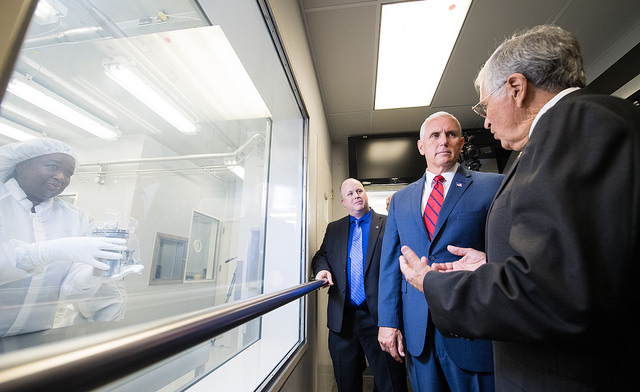
Vice President Mike Pence, center, views Sample 15014, which was collected during Apollo 15 with NASA’s Apollo Sample Curator Ryan Zeigler, left, and Apollo 17 astronaut and geologist Dr. Harrison Schmitt, right, in Lunar Curation Laboratory at NASA’s Johnson Space Center, Thursday, Aug. 23, 2018 in Houston, Texas. Sample 15014 is one of nine samples out of the 2,196 collected during the Apollo missions that was sealed inside its container on the Moon and still containes gasses from the Moon. Credit: NASA/Joel Kowsky
Novel instrumentation
Another key report view: No current missions include the return of extraterrestrial cryogenic materials, but efforts are underway to design missions that could, within the next few decades, return gases and eventually ice from Earth’s Moon, comets, or the icy moons of outer planets.
If one or more of these mission concepts is pursued, it could reap tremendous scientific advances. Samples returned would likely include gases, ice, and organic matter. Appropriate investments in the development of novel instrumentation and analytical techniques, specifically for curation as well as characterization and analysis of non-traditional samples, must start now because they will take decades to complete.
What now?
Flagged in the report is the stalwart work of the Astromaterials Acquisition and Curation Office at NASA’s Johnson Space Center (JSC) in Houston, Texas.
The NASA Planetary Science Division should increase support for JSC to develop appropriate facilities necessary for future sample returns of organic matter, ice, and gases, says the report.
The division should also accelerate planning for curation of returned Martian samples, seeking partnerships with other countries as appropriate, the report notes.
For your copy of the new report, Strategic Investments in Instrumentation and Facilities for Extraterrestrial Sample Curation and Analysis, go to:
https://www.nap.edu/download/25312

China’s Chang’e-4 Moon lander – farside bound
Credit: New China TV
China is once again at the door step of exploring the Moon.
Hurled moonward by a Long March-3B carrier rocket from the Xichang Satellite Launch Center in southwest China’s Sichuan Province, Chang’e-4 has nudged itself into an elliptical lunar orbit with instructions yet to come on when the craft will nose-dive to a farside of the Moon landing.

Chang’e-4 Moon lander and rover.
Credit: Chinese Academy of Sciences
For more details on the implications of Chang’e-4, go to my new Scientific American story:
With First-Ever Landing on Moon’s Farside, China Enters “Luna Incognita”
The Chang’e-4 mission could have major effects on Earthbound science and politics
By Leonard David on December 21, 2018
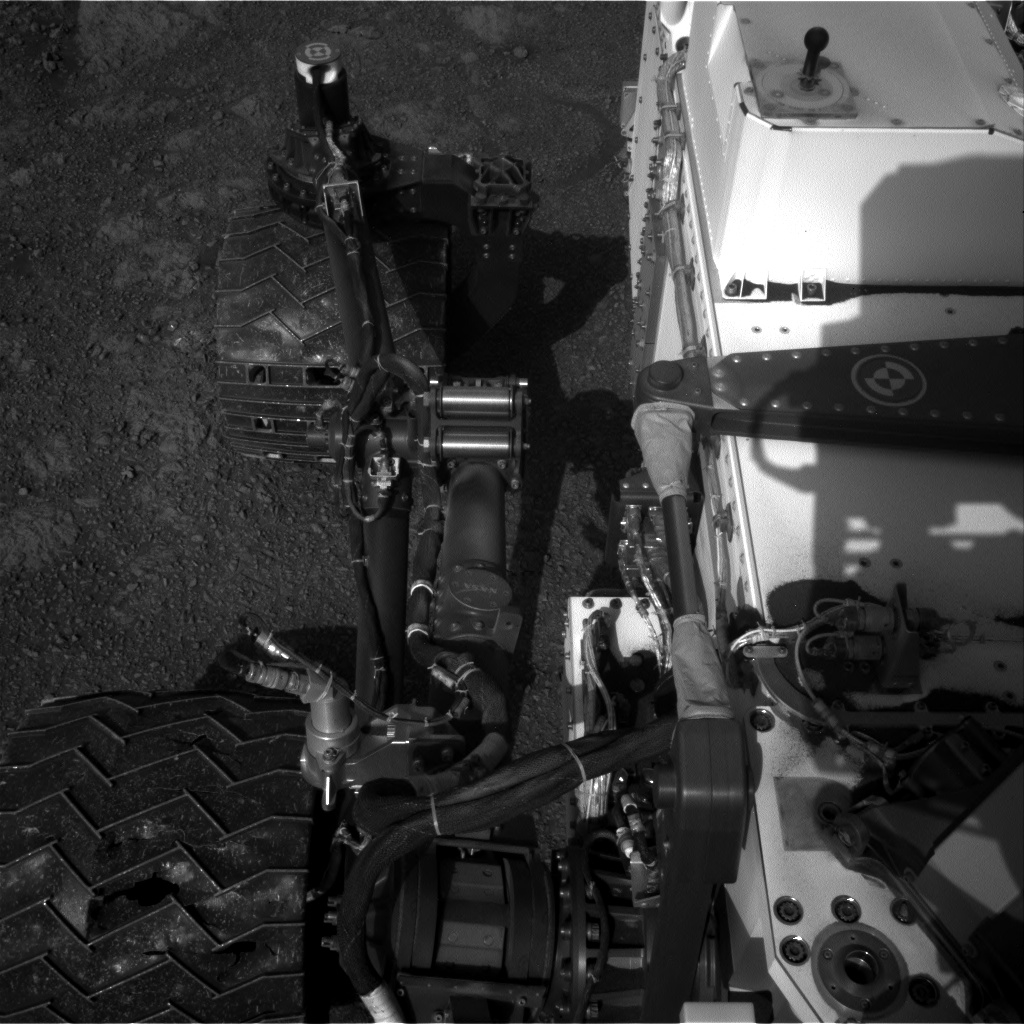
Curiosity Navcam Left A image acquired on Sol 2265, December 20, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2266 duties.
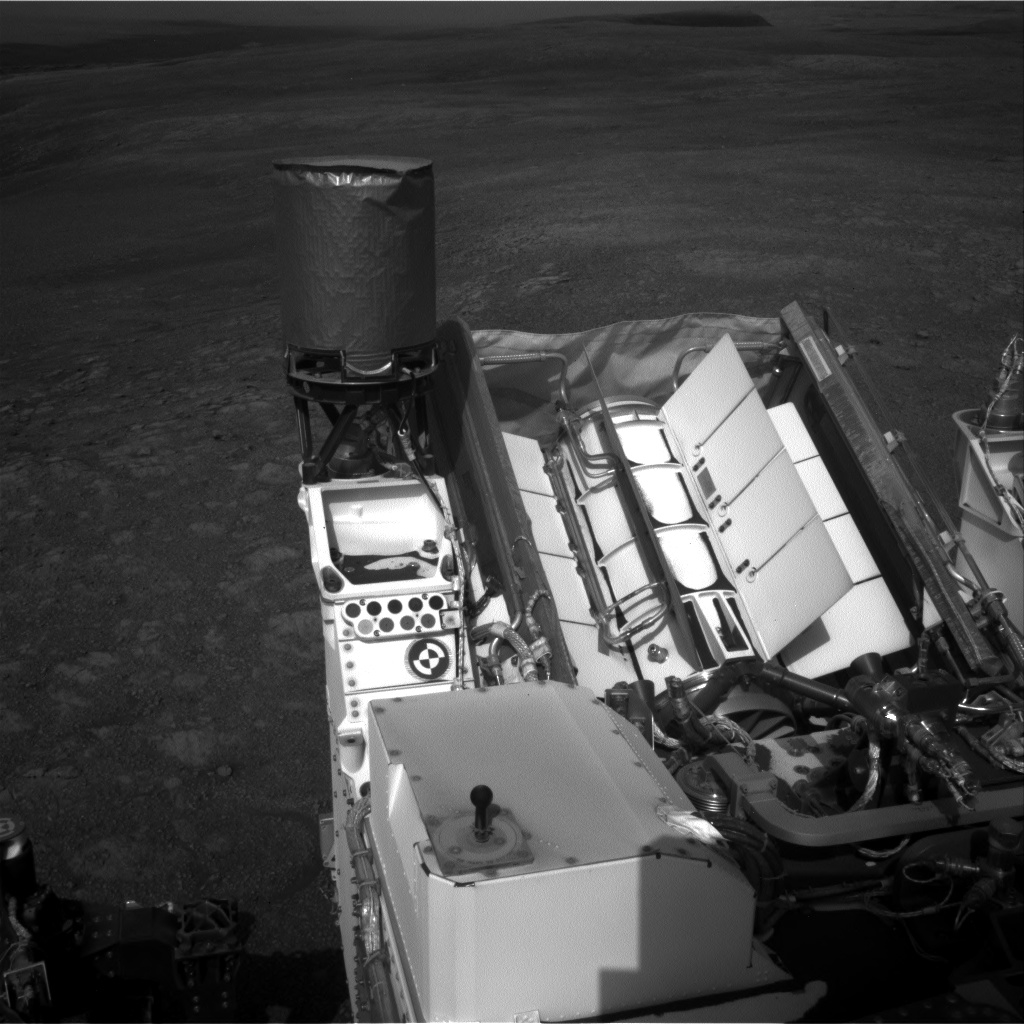
Curiosity Navcam Left A image acquired on Sol 2265, December 20, 2018.
Credit: NASA/JPL-Caltech
Reports Lucy Thompson, a planetary geologist at the University of New Brunswick, Fredericton, New Brunswick, Canada, there’s been extensive planning for the rover for the holidays.
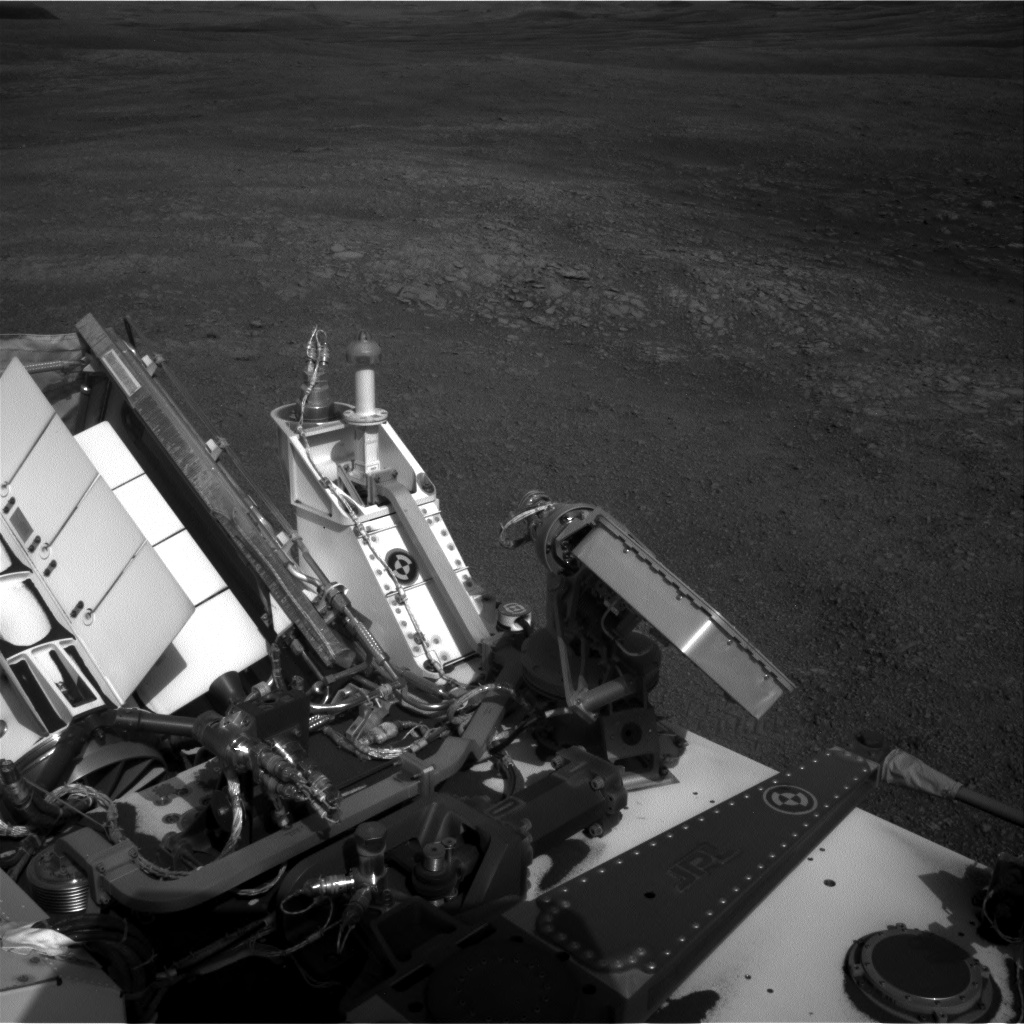
Curiosity Navcam Left A image acquired on Sol 2265, December 20, 2018.
Credit: NASA/JPL-Caltech
Planning has revolved around making sure that Curiosity has enough power after the Christmas holidays to be able to continue analyzing “Rock Hall,” the red Jura sample that was successfully drilled last weekend.
Uplinked plans
One martian day of science and diagnostic activities have been uplinked to the robot, Thompson adds, along with 10 sols of Rover Environmental Monitoring Station (REMS) observations through the end of December.
Also underway are Curiosity plans for Sols 2276 – 2278 to be executed on Mars before the team here on Earth returns to nominal planning activities.
“The priority was to facilitate diagnostic testing of the B-side computer to help assess the rover anomaly we experienced a few months ago,” Thompson points out. “The diagnostics require Curiosity to be awake for long periods of time, which drains her battery, and does not leave much power for other activities.”
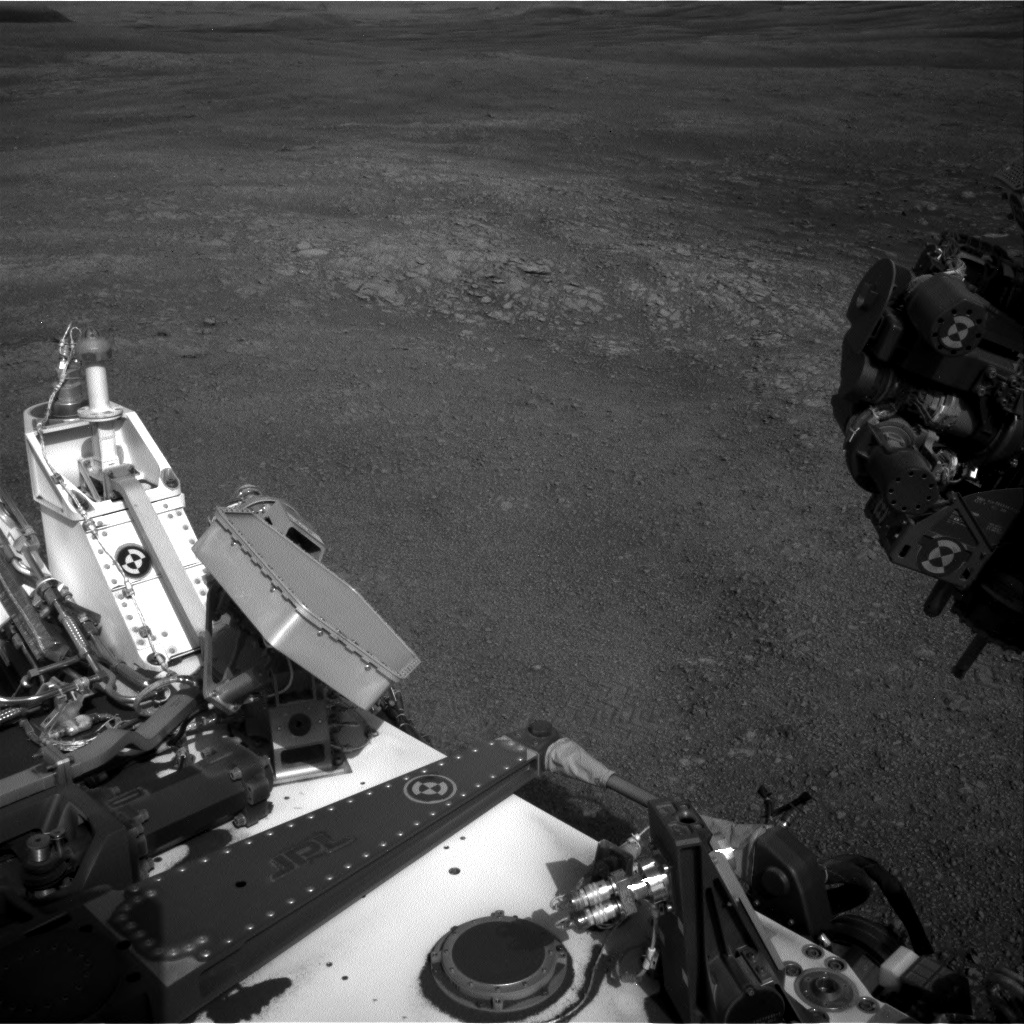
Curiosity Navcam Right A image taken on Sol 2265, December 20, 2018.
Credit: NASA/JPL-Caltech
Change detection imagery
While there had been tentative plans for some Chemistry and Camera (ChemCam)
Laser-induced Breakdown Spectroscopy (LIBS) and Remote Micro-Imager (RMI) observations of rock targets in the workspace, as well as some Mastcam and Navcam environmental activities, scientists were unable to fit them into the final plan.

Curiosity Mastcam Right image acquired on Sol 2264, December 19, 2018.
Credit: NASA/JPL-Caltech/MSSS
“We were able to include some Mastcam change detection images of a couple of the sand-filled polygonal troughs in this area (“Luskentyre” and “Fishertown”), Thompson says, “to monitor how the wind moves sand around, as well as a Navcam deck pan to observe the rover deck.”
Curiosity Mastcam Left photo taken on Sol 2264, December 19, 2018.
Credit: NASA/JPL-Caltech/MSSS
Standard Dynamic Albedo of Neutrons (DAN) passive and DAN active, Radiation Assessment Detector (RAD) and REMS activities round out the plan, Thompson concludes.
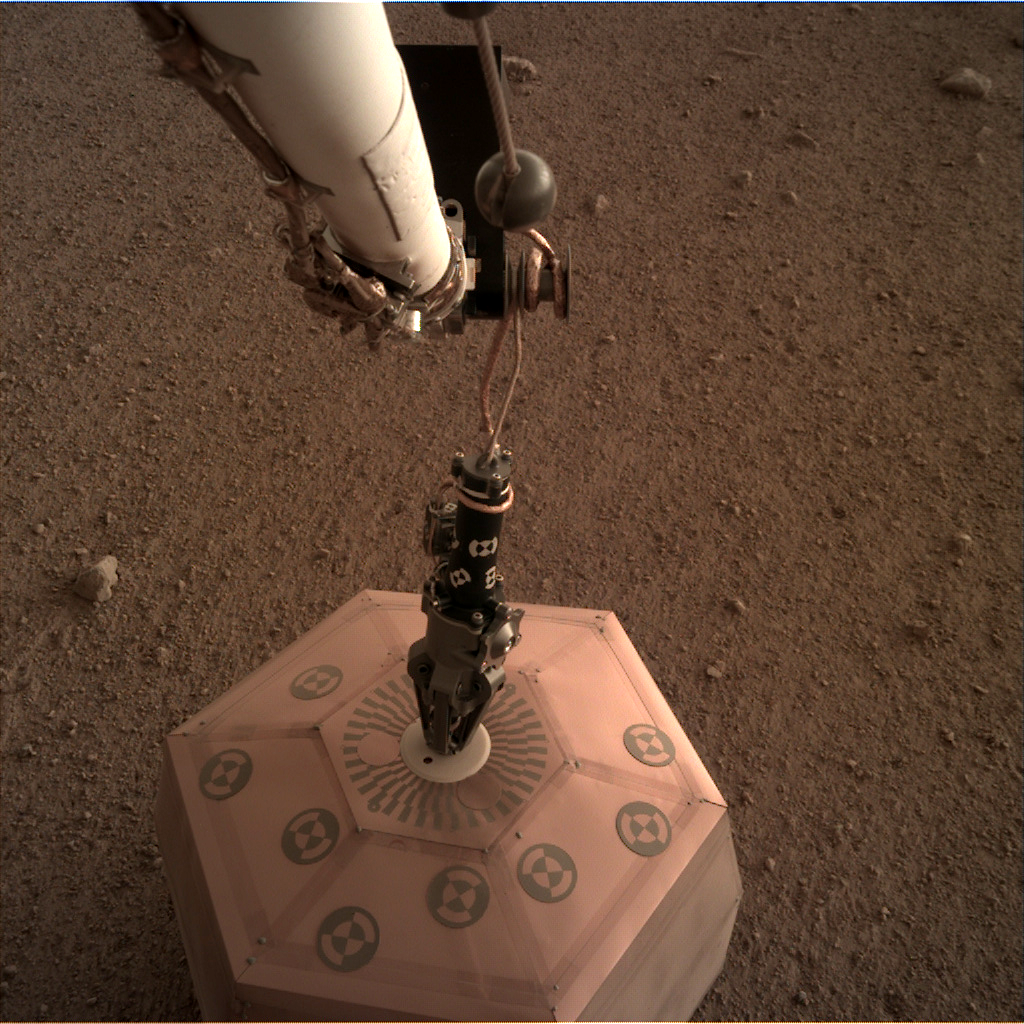
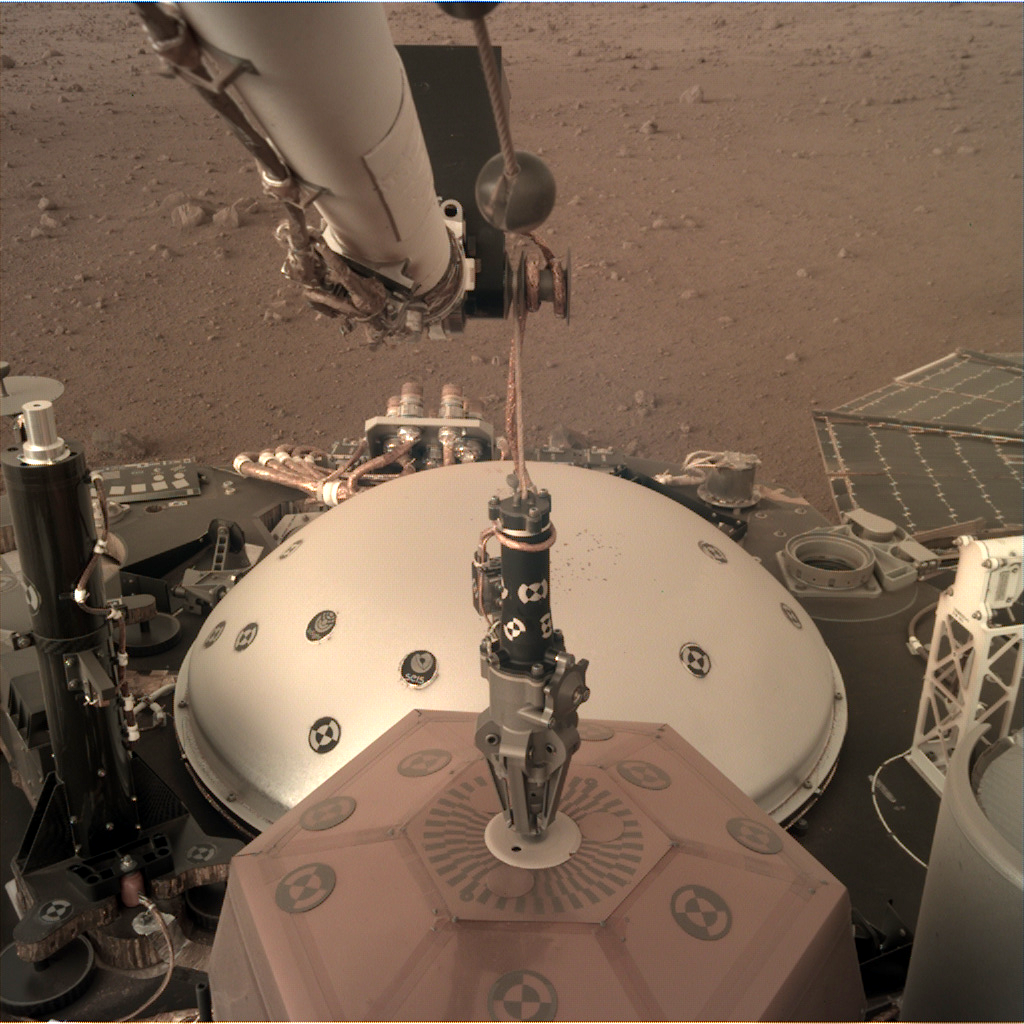
Seismometer on the surface! Sol 22: Instrument Deployment Camera (IDC)
NASA’s InSight Mars lander acquired this image using its robotic arm-mounted, Instrument Deployment Camera (IDC).
Credit: NASA/JPL-Caltech
Landing on Mars on November 26, NASA’s InSight lander has used its robotic arm outfitted with grippers to emplace its Seismic Experiment for Interior Structure, or SEIS, on the Red Planet’s surface.
On Wednesday, Dec. 19, the seismometer was gently placed onto the ground directly in front of the lander, about as far away as the arm can reach – 5.367 feet, or 1.636 meters, away).

Credit: IPGP/Manchu/Bureau 21
On the level
In the coming days, the InSight team will work on leveling the French-built seismometer, which is sitting on ground that is tilted 2 to 3 degrees. The first seismometer science data should begin to flow back to Earth after the seismometer is in the right position.
According to a JPL press statement, engineers and scientists at JPL, the French national space agency Centre National d’Études Spatiales (CNES) and other institutions affiliated with the SEIS team, will need several additional weeks to make sure the returned data are as clear as possible.
Artist concept showing the protective role of the wind and thermal shield (WTS) at the martian surface.
Credit: IPGP/David Ducros).
Next steps
In early January, engineers expect to command the robotic arm to place the Wind and Thermal Shield over the seismometer to stabilize the environment around the sensors.
By Late January, assuming that no problems crop up, the InSight team plans to deploy the German-provided Heat Flow and Physical Properties Probe, or HP3) onto the Martian surface. HP3 will be on the east side of the lander’s work space, roughly the same distance away from the lander as the seismometer.

Sequence of Sol 22: Instrument Context Camera (ICC) shows deployment of seismometer. Credit: NASA/JPL-Caltech
Instrument Context Camera (ICC) shows deployment of seismometer. Credit: NASA/JPL-Caltech

Barely visible laser shots within newly drilled hole. Curiosity Mastcam Right image acquired on Sol 2263, December 18, 2018.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover has just begun Sol 2265 tasks.
“We are still very excited and happy that the final drill hole, “Rock Hall,” on Vera Rubin Ridge was successful over the weekend,” reports Kristen Bennett, a planetary geologist at the USGS in Flagstaff, Arizona.
“Now we get to analyze the drilled sample with rover instruments…and the big event will be delivering some of the Rock Hall sample to the CheMin [Chemistry & Mineralogy X-Ray Diffraction] instrument.
Drill hole
Additionally, Curiosity’s Chemistry and Camera (ChemCam) Laser Induced Breakdown Spectroscopy (LIBS) device is planned to target the drill hole to understand the chemistry, and a Mastcam 360-degree mosaic is planned to document the surroundings around the drill hole, Bennett explains.
Curiosity Mastcam Left photo taken on Sol 2263, December 18, 2018.
Credit: NASA/JPL-Caltech/MSSS
“Although the drill was successful over the weekend, a few of the remote science observations were not obtained,” Bennett adds.

Curiosity Mastcam Right image acquired on Sol 2263, December 18, 2018.
Credit: NASA/JPL-Caltech/MSSS
To recover some of those observations, Bennett concludes, the plan for the Mars robot was to retake the “Lairig Ghru” Mastcam observation that would document layering near Curiosity.
NASA’s InSight Mars lander acquired this image on December 17, 2018, Sol 20, using its robotic arm-mounted, Instrument Deployment Camera (IDC).
Credit: NASA/JPL-Caltech
Progress with the Instrument Deployment Arm (IDA), a two-meter-long robotic arm designed to deploy with the greatest precision and safety possible the mission’s two main instruments, namely the French-built seismometer and the German-provided HP3 heat flow sensor.
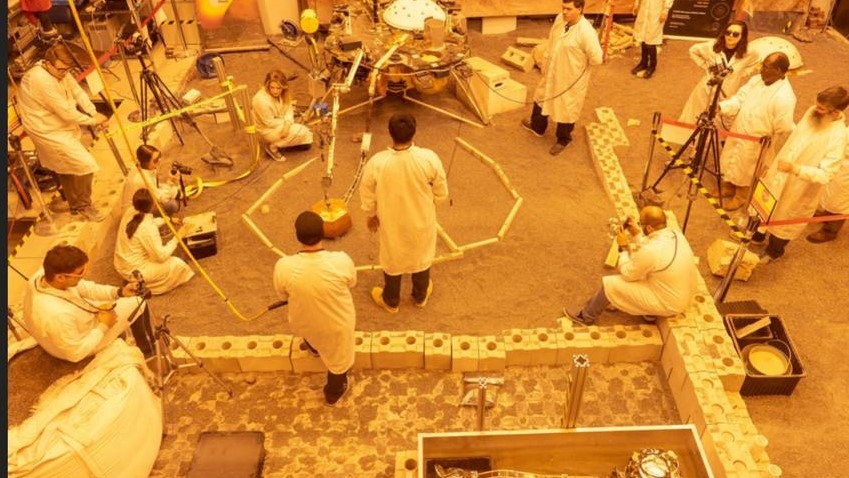
ForeSight, a fully functional, full-size model of NASA’s InSight lander, sits in a lab space that has been sculpted to match terrain in front of the real lander on Mars.
Credit: NASA/JPL-Caltech/IPGP
InSight’s seismometer, SEIS, the Seismic Experiment for Interior Structure, is a round, dome-shaped instrument that will sit on the Martian surface and take the “pulse” or seismic vibrations of Mars.

Credit: IPGP/Manchu/Bureau 21
Wind and thermal shield
The SEIS seismometer involves use of a dome-shaped wind and thermal shield (WTS) that protects it from wind and temperature variations.
With the aid of two cameras, InSight operators need to choose a landing site for these two instruments before setting them down using the robotic arm.

The wind and thermal shield (WTS).
Credit: Agence Idé/CNES.
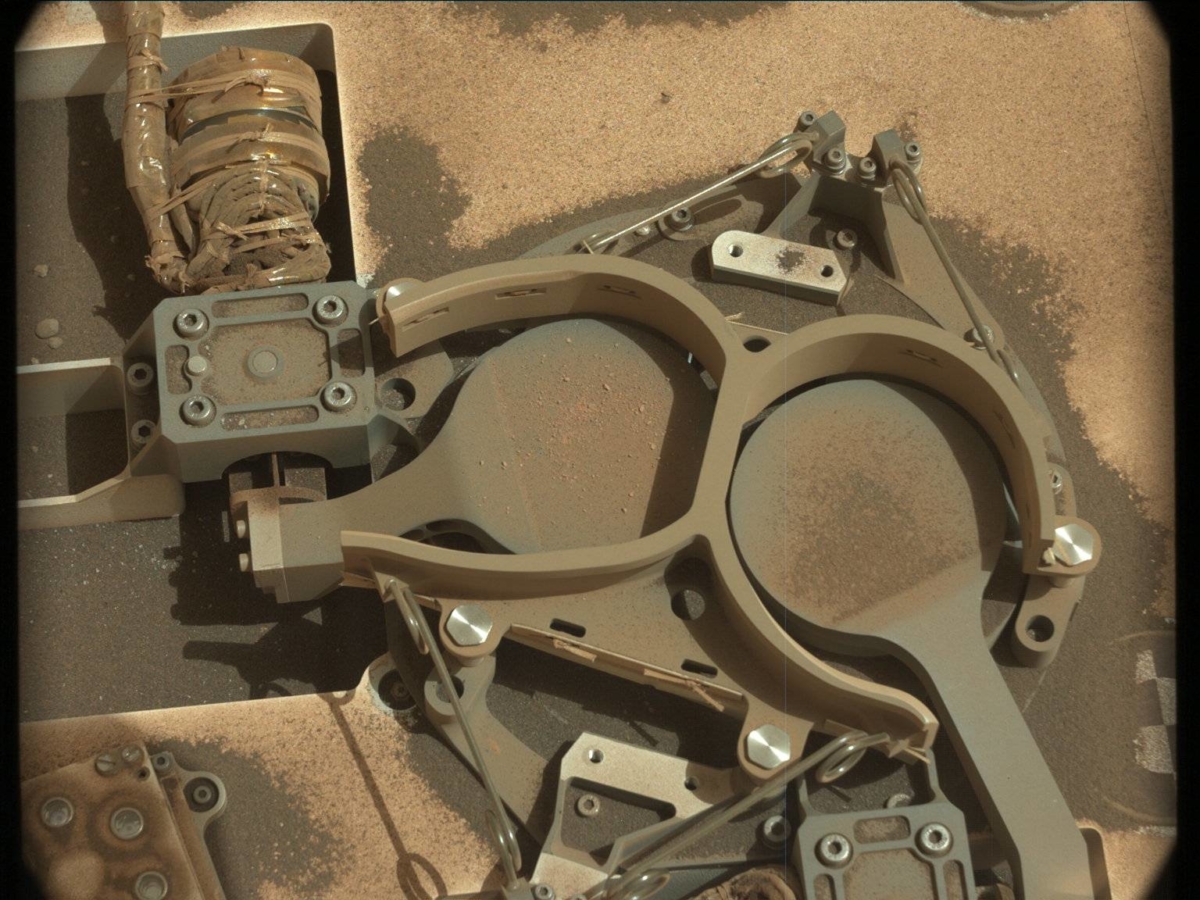
Five-claw gripper
The IDA on the InSight probe will soon lift the SEIS seismometer 64 pound (29 kilograms), the 21 pound (9.5 kilogram) wind and thermal shield and the HP3 penetrator that weighs 7 pounds (3 kilograms).
Artist concept showing the protective role of the wind and thermal shield (WTS) at the martian surface.
Credit: IPGP/David Ducros).
Each device to be placed on the ground is fitted with a “handle” consisting of a rigid rod terminating in a sphere. This is designed so that it can be grasped as easily as possible by the five-claw gripper attached to the IDA.

