Archive for the ‘Space News’ Category

Credit: NASA
Renewed interest in exploration of the Moon has the potential to benefit lunar science greatly and could evolve into a program facilitated by partnerships between commercial companies and NASA’s Science Mission Directorate (SMD).
That’s the view of companion reports issued today by the National Academies of Sciences, Engineering, and Medicine.
The two studies are:
Review of the Planetary Science Aspects of NASA SMD’s Lunar Science and Exploration Initiative
Review of the Commercial Aspects of NASA SMD’s Lunar Science and Exploration Initiative

Credit: Blue Origin
Spotlighted in the reports are the rapid and effective steps NASA’s science directorate has taken in responding to a 2017 presidential directive to lead an innovative and sustainable program of exploration with commercial and international partners, beginning with a near-term focus on the Moon.

Private sector Moon rover.
Credit: Carnegie Mellon/Mark Maxwell
Many unknowns
That said, however, the two reports find that the activities undertaken to date — although aligned with community consensus for lunar science priorities — do not replace missions recommended in the National Academies’ most recent planetary science decadal survey.
Furthermore, the reports indicate success is susceptible to many unknowns, such as the ability of standardized commercial lunar landers to interface with complex science payloads.

Peregrine lunar lander
Credit: Astrobotic
Point of divergence
Asked to respond to the reports, Inside Outer Space received this comment from Astrobotic CEO, John Thornton:
“Overall, I’m heartened by the findings in these two reports. These reports affirm that the Administration and NASA did the right thing by instituting [the Commercial Lunar Payload Services] (CLPS), and Congress’s bipartisan funding support for the program is opening badly needed new pathways for U.S. lunar science and exploration,” Thornton said in a statement.
“The only point of divergence we had with the reports is the finding that commercial lander interfaces are not yet well defined for the payload community,” Thornton noted. “We’re now on version 3 of our publicly available Payload User’s Guide, and we have an extensive customer support program to facilitate payload conceptualization, development, and integration. We stand ready today to serve the needs of the science community with our Peregrine lander.”
Reports available
The studies — issued by the Committee on Astrobiology and Planetary Sciences — were sponsored by NASA and are available here:
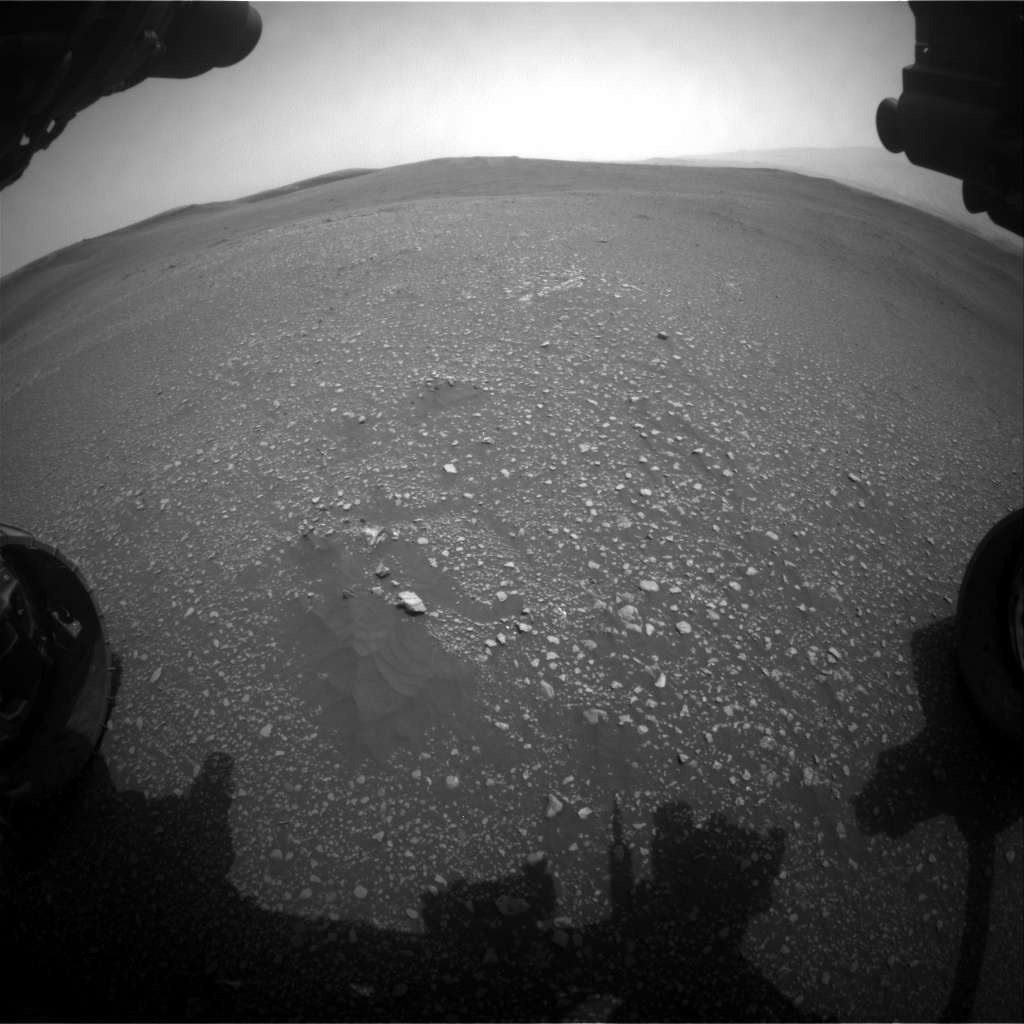
Curiosity Front Hazcam Left A image taken on Sol 2312, February 6, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2313 tasks.
“Curiosity is cruising through the clay-bearing unit on some compacted clast-rich soil,” reports Scott Guzewich, an atmospheric scientist and NASA’s Goddard Space Flight Center in Greenbelt, Maryland. “It’s some of the best driving terrain we’ve encountered in Gale Crater, with just some occasional sandy patches in the lee of small ridges.”
Curiosity Rear Hazcam Right A photo acquired on Sol 2312, February 6, 2019.
Credit: NASA/JPL-Caltech
Guzewich adds that the rover’s route will take it northward along the east and south flank of the Vera Rubin Ridge toward an anticipated first drilling stop in the clay-bearing unit.
Touch and go
“Along the way, we’re stopping regularly for ‘touch-and-go’ contact science,” Guzewich notes. “Given the lack of even modest size rocks or bedrock outcrops nearby, we targeted a small soil patch termed ‘Alba.’”

Curiosity Mastcam Left image taken on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech/MSSS
Also planned is use of the robot’s Chemistry and Camera (ChemCam and Mastcam to interrogate the area around Alba, in addition to some geologic targets both near and far.

Curiosity Mastcam Right image acquired on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech/MSSS
Eyeing Mt. Sharp
“Now that we’re driving along the edge of the Vera Rubin Ridge, it blocks our view of the dune fields to the north and west that were our preferred targets for observing dust devils,” Guzewich points out. On the plan is a look toward Mt. Sharp (toward the east-southeast) with a long-duration dust devil movie to see if that area may also be conducive to dust devils, he concludes.

Chang’e-4 farside mission – lander and Yutu-2 rover
Credit: CNSA/CLEP
NASA and the China National Space Administration (CNSA) are coordinating efforts focused on the recent touchdown of China’s Chang’e-4 Moon lander and Yutu-2 rover. The robotic probe throttled itself down on January 3 within the Von Kármán crater in the South Pole-Aitken Basin on the farside of the Moon.
Chang’e-4’s farside landing zone.
Credit: NASA/GSFC/Arizona State University
The U.S. space agency has also held discussions with the CNSA to look for landing plume effluents from the Chinese probe as it stuck the landing on the lunar terrain.
For more information on collaborative efforts underway with China by NASA, as well as the European Space Agency, go to my new Scientific American article:
Farside Politics: The West Eyes Moon Cooperation with China
Scientists and policy makers in the U.S. and Europe are seeking new ways to work with China on its ambitious lunar exploration program

“Horning in” on an asteroid. Sampler horn will be used to gather up space rock material.
Credit: JAXA/Screengrab/Inside Outer Space
“It is the pinnacle of the mission!”
Those are the words of Japan’s Hayabusa2 team officials, prepared to land atop asteroid Ryugu.
The touchdown operation to collect a sample from Ryugu will be between February 20th – 22nd.
Hayabusa2 is scheduled to begin the descent from February 21, and touchdown on the surface of Ryugu around 8am on February 22 (JST).

Hayabusa2 project members.
Credit: ISAS/JAXA
First touchdown
To orchestrate the first touchdown (TD1) on the space rock, the Hayabusa2 team has executed a prolonged injection test of the spacecraft’s thrusters. That test was in connection with deploying the small carry-on impactor (SCI) that will create a crater on the space rock.
The recent test checked whether attitude control and the reaction control system (RCS) subsystem functions worked as expected under a strong disturbance that is not usually experienced.
Hide behind the asteroid
Although the test was run for about half the final injection time, both the attitude control and RCS subsystem worked almost as expected, the Hayabusa2 controllers report, and they acquired valuable data for the actual SCI operation.
After separating the impactor in the SCI operation, Hayabusa2 needs to swiftly hide behind the asteroid to avoid flying debris generated by the SCI explosion.

The sampler horn on Hayabusa2 captured with the Small Monitor Camera on August 14, 2018.
Credit: JAXA
Sampler horn
In addition, there’s also been an appraisal of the vibration that the spacecraft’s sampler horn may encounter. This vibration test was to confirm that Hayabusa2 will not perform an emergency escape if it incorrectly detects the vibration of the sampler before landing.
This device is designed to shoot a small projectile as soon as the tip of a cylinder-shaped horn touches Ryugu’s surface, then materials ejected from the asteroid will be collected in a catcher.
Go to this Japan Aerospace Exploration Agency (JAXA)-supplied video for a perspective on the upcoming touchdown operations:
https://youtu.be/OR-vN1xyfF0?list=PLCQJJ3lTBuyCtMDbvkQcg4fb7yAHheqyN

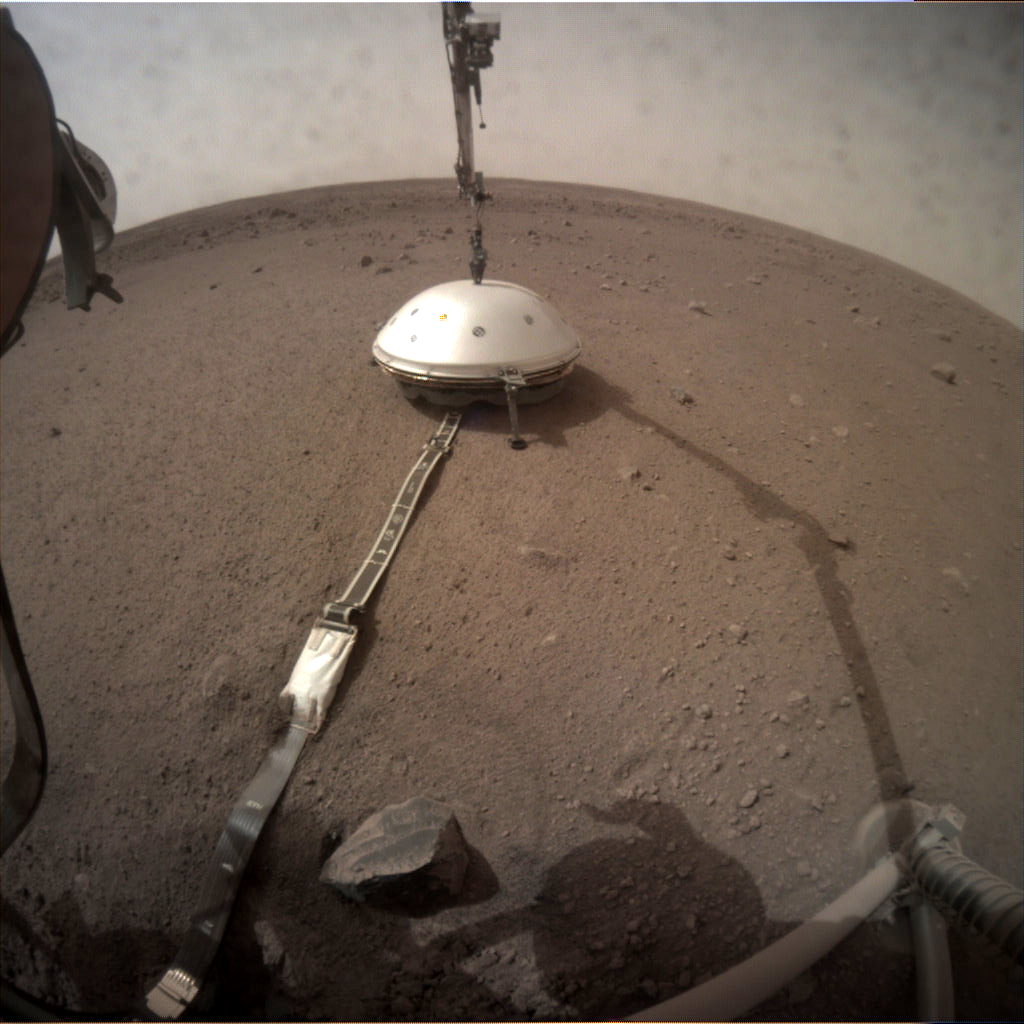
Instrument Context Camera (ICC) photo was acquired on February 6, 2019, Sol 70 of the InSight mission.
Credit: NASA/JPL-Caltech
NASA’s InSight Mars lander has “skirted” the issue of fully deploying the wind and thermal shield (WTS) over the French-built seismometer.
Instrument Context Camera (ICC) photo was acquired on February 2, 2019, Sol 66 of the InSight mission.
Credit: NASA/JPL-Caltech
Photos taken by the lander’s Instrument Context Camera (ICC) show the gold-coated thermal skirt. The WTS was developed by NASA’s Jet Propulsion Laboratory.
The WTS consists of an aerodynamically shaped aluminium cover with a honeycomb structure to which is attached a gold-coated thermal skirt.
The extendable skirt is bordered around its circumference by a kind of chain-mail, not unlike that worn as armor by mediaeval knights.

Ground test of deploying the wind and thermal shield skirt.
Credit: NASA/JPL-Caltech/IPGP/Philippe Labrot
Its weight alone allows the skirt to descend. Its platelet structure cover obstacles such as pebbles, sealing off the WTS.

Credit: NASA/GSFC/Arizona State University
NASA’s sharp-shooting Lunar Reconnaissance Orbiter (LRO) has successfully imaged China’s Chang’e-4 spacecraft on the floor of Von Kármán crater.
On January 3, 2019 the Chinese spacecraft landed on the Moon’s farside.

Credit: NASA/GSFC/Arizona State University
Four weeks later, on January 30, as LRO approached the (116 mile (186 kilometer) diameter crater from the east, it rolled 70° to the west to snap a spectacular view looking across the floor towards the west wall.
Because LRO was 205 miles (330 kilometers) to the east of the landing site, the Chang’e 4 lander is only about two pixels across (bright spot between the two arrows), and the small rover is not detectable.

Previously released image of Chang’e-4 lander taken by Yutu-2 rover.
Credit: CNSA/CLEP
The massive mountain range in the background is the west wall of Von Kármán crater, rising more than 9,850 feet (3,000 meters) above the crater’s floor.
NASA’s Lunar Reconnaissance Orbiter’s LROC imaging system is operated by Mark Robinson at Arizona State University in Tempe.
To take a look at the imagery and the special zoomify image, go to:
http://lroc.sese.asu.edu/posts/1090

NASA’s Lunar Reconnaissance Orbiter (LRO).
Credit: NASA/Goddard Science Visualization Studio (SVS)
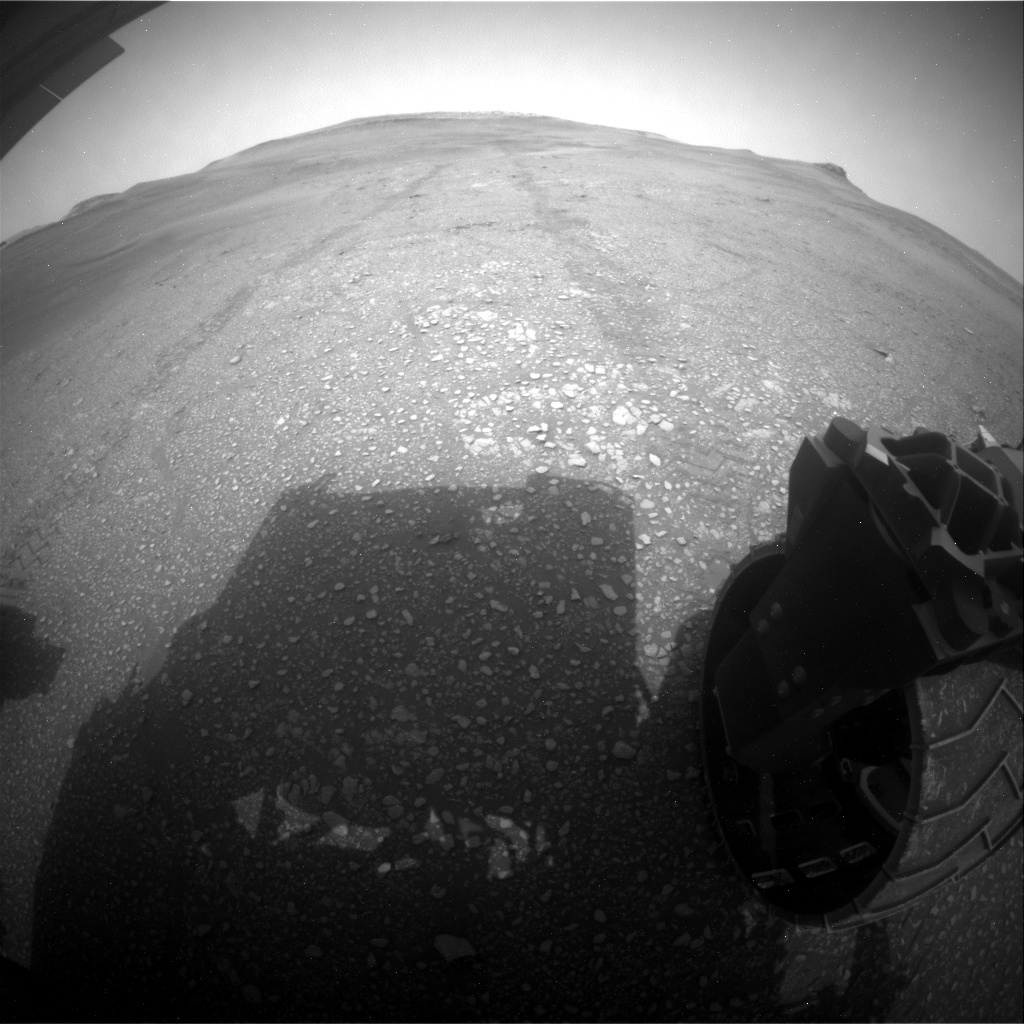
Curiosity Front Hazcam Left A photo taken on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on Mars is well into Sol 2312 operations.
Curiosity is targeting small bedrock patches, pebbles, and soil reports Roger Wiens, a geochemist at Los Alamos National Laboratory in Los Alamos, New Mexico.
Over the weekend Curiosity completed a drive over 65 feet (20 meters).

Curiosity Navcam Left A image taken on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech
Heading east
“Curiosity is heading east and will be driving below the upper side of Vera Rubin Ridge, toward waypoint 2. One of the goals for this portion of the traverse is to image the rock layers along its upper slope, but so far the slope appears to be mostly covered with soil,” Wiens notes.

Curiosity Navcam Left A image taken on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech
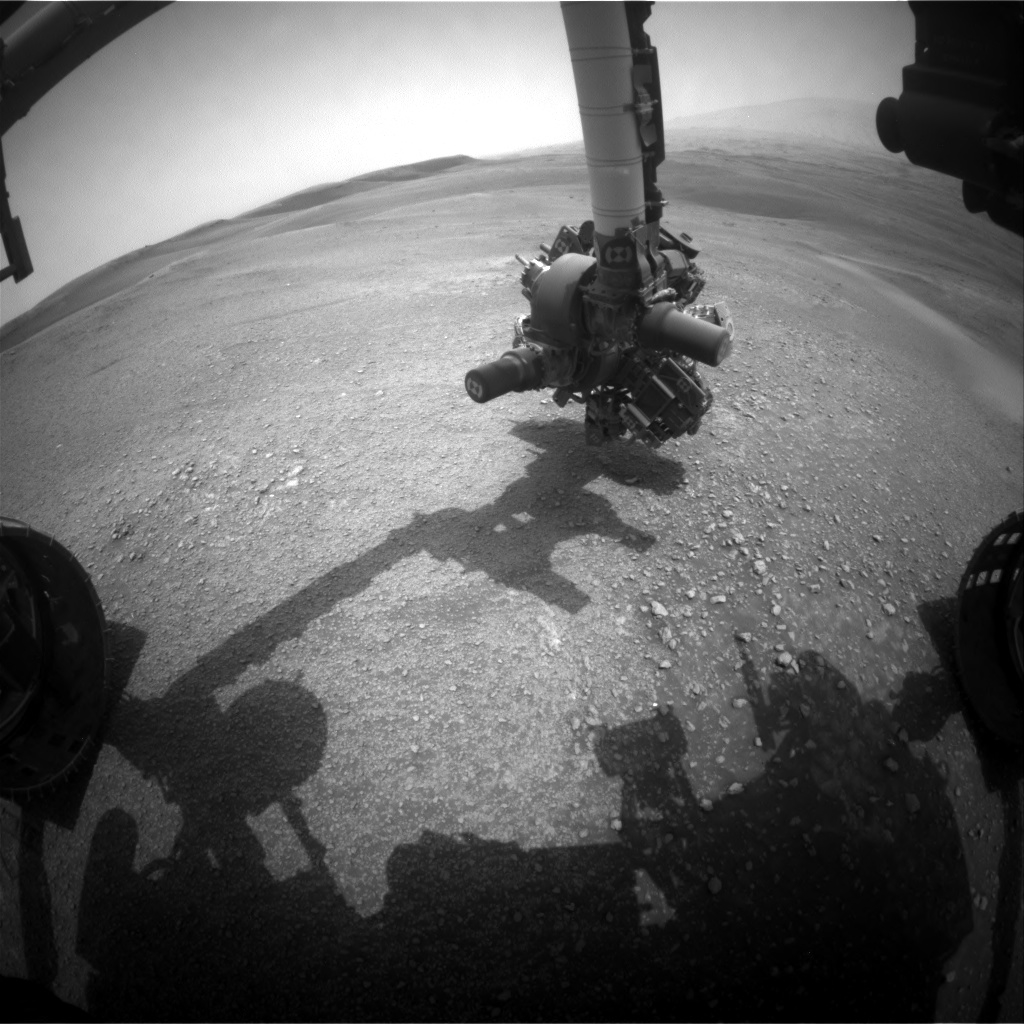
A recent plan included observations of what appears to be small bedrock targets, with Mastcam, Alpha Particle X-Ray Spectrometer (APXS), Chemistry and Camera (ChemCam), and Mars Hand Lens Imager (MAHLI) observations of target “Isbister,” ChemCam Remote Micro-Imager (RMI)-only observation of “Magnus,” and Mastcam observation of the ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) target from the weekend.
The robot’s Mastcam was tasked with imaging “Knockfarril Hill,” “Crawton,” and “Elgol.”

Curiosity Navcam Left A image taken on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech
Pebbly surface
Following a planned drive of 144 feet (44 meters) and post-drive imaging, the rover’s Mars Descent Imager (MARDI) will get a view of the pebbly surface in the new location, and the Radiation Assessment Detector (RAD), Dynamic Albedo of Neutrons (DAN) and the Rover Environmental Monitoring Station (REMS)
RAD, DAN, and REMS are on tap to take measurements, Wiens says, along with Mastcam mosaic and Navcam horizon and dust-devil surveys.
“The plan also includes a number of engineering checks, including one on the current thermal environment,” Wiens adds.
Road map
Meanwhile, a new Curiosity traverse map through Sol 2309 has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2309 Martian day, or sol, of the rover’s mission on Mars (February 04, 2019).
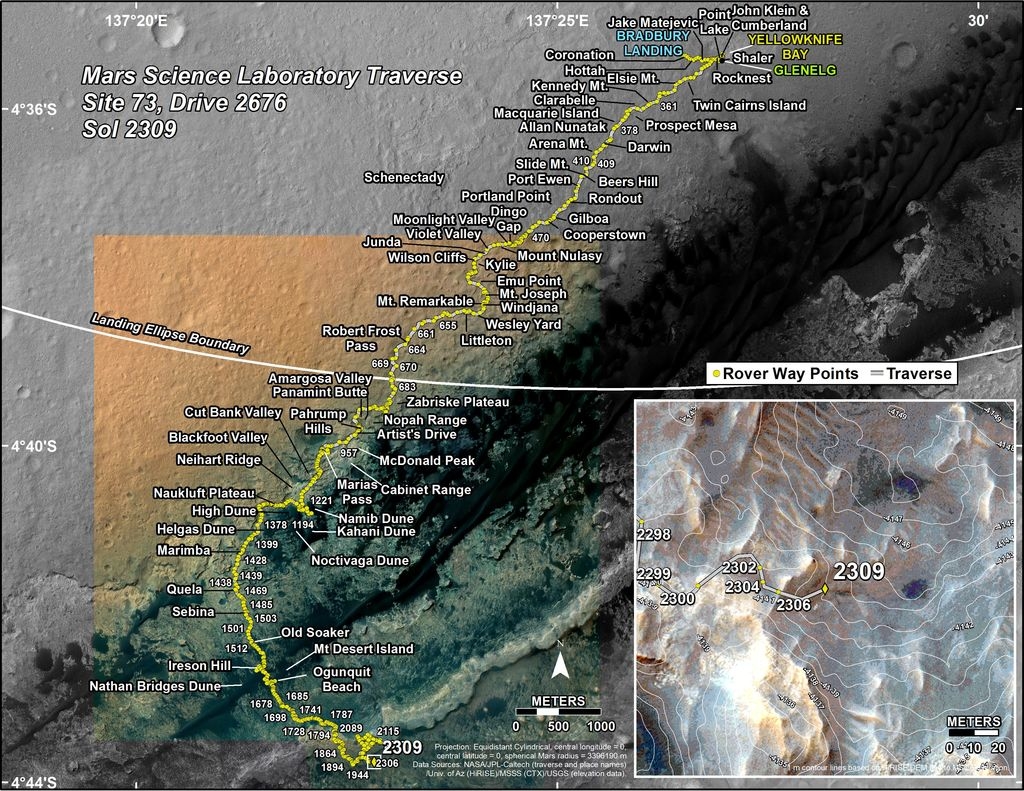
Credit: NASA/JPL-Caltech/Univ. of Arizona
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2306 to Sol 2309, Curiosity had driven a straight line distance of about 62.57 feet (19.07 meters), bringing the rover’s total odometry for the mission to 12.48 miles (20.08 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Curiosity Navcam Right A photo acquired on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech
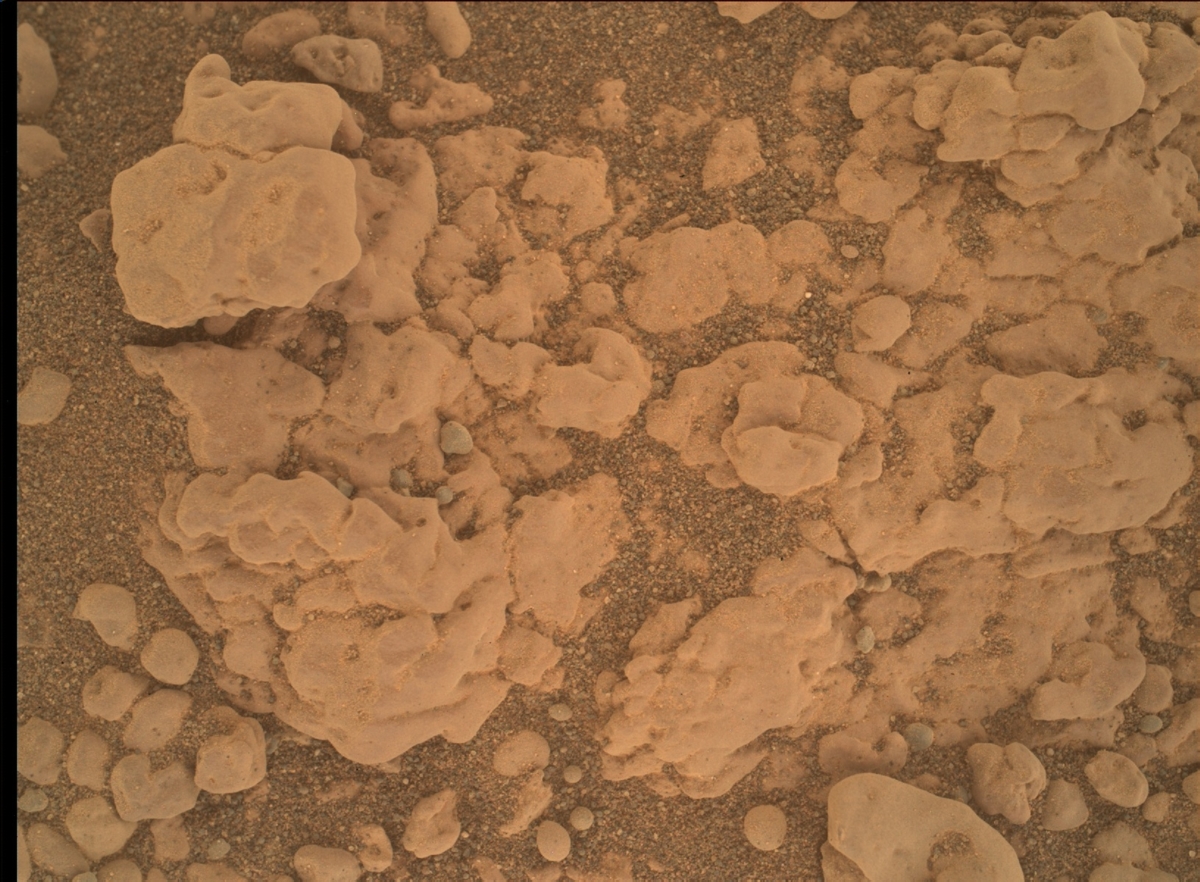
Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2311, February 5, 2019.
Credit: NASA/JPL-Caltech/MSSS

Image shows the target “Brent” in the lower right corner; it was analyzed with ChemCam and APXS, and imaged with MAHLI over the weekend. It is a rounded pebble roughly an inch (2.5 cm) in diameter. In spite of the fact that it has been rounded by mechanical abrasion, it still shows faint layering. You can also see inclusions that are partially filled with brighter material. Marching vertically across the face of the pebble are five laser pits from ChemCam. The bottom of each pit has a telltale whitish appearance.
Curiosity MAHLI Sol 2308, February 2, 2019
Credit: NASA/JPL-Caltech/MSSS

CubeSats deployed from the International Space Station.
Credit: NASA
Bryce Space and Technology, an analytics and engineering firm for space and satellite, cyber, and R&D clients, has released two informative reports: Smallsats by the Numbers: 2019 and 2018 Orbital Launches Year in Review.
Organizations have deployed more than 1,300 smallsats since 2012. This latest report from Bryce includes data on commercial, government, and academic trends.
Here are the 2018 highlights:
36% of smallsats were launched from the US in 2018
2018 saw 6x as many smallsats launched as 2012
CubeSats have dominated the smallsat market; 961 launched 2012 – 2018
This report is available at:
http://brycetech.com/downloads/Bryce_Smallsats_2019.pdf

Long March-2C carrier rocket departs Jiuquan Satellite Launch Center in northwest China’s Gobi Desert.
Also available is 2018 Orbital Launches Year in Review.
In 2018, there were 114 orbital launches. This is the most launches worldwide since 1990. U.S. launch providers conducted the most commercial launches while China launched the highest volume of launches.
View the data in the 2018 Orbital Launches Year in Review report at:
http://brycetech.com/downloads/Orbital_Launches_Year_in_Review_2018.pdf
NASA’s Curiosity Mars rover is now performing Sol 2310 duties.
New imagery from February 3 is available of the robot’s new surroundings:

Curiosity Navcam Left A image acquired on Sol 2309, February 3, 2019.
Credit: NASA/JPL-Caltech

Curiosity Navcam Left A image acquired on Sol 2309, February 3, 2019.
Credit: NASA/JPL-Caltech

Curiosity Navcam Left A image acquired on Sol 2309, February 3, 2019.
Credit: NASA/JPL-Caltech
Curiosity Navcam Right A image acquired on Sol 2309, February 3, 2019.
Credit: NASA/JPL-Caltech
Curiosity Navcam Right A image acquired on Sol 2309, February 3, 2019.
Credit: NASA/JPL-Caltech
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2309, February 3, 2019.
Credit: NASA/JPL-Caltech/LANL

Yutu-2 rover as imaged by Chang’e-4 lander earlier in the farside mission.
Credit: CNSA/CLEP
China’s lunar rover Yutu-2 has begun taking its second snooze today, a midday nap, on the farside of the Moon.
According to China Central Television (CCTV), without a good thermal control ability, the rover is experiencing midday temperatures surpassing 100 degrees Celsius.
The rover will be awakened again on Friday.
Nighttime temperatures
The Yutu-2 and lander of the Chang’e-4 mission were awakened by sunlight on Jan. 29 and 30 respectively after a long “sleep” during the first extremely cold night on the Moon.

Image of Chang’e-4 lander taken by Yutu-2 rover early in the farside mission.
Credit: CNSA/CLEP
Nighttime temperatures on the Moon plummeted to minus 190 degrees Celsius, the first data China has obtained about temperature on the lunar surface during the 14-day long nighttime.
China’s Chang’e-4 lander/rover landed on January 3 within the Von Kármán crater in the South Pole-Aitken Basin on the farside of the Moon.

Von Kármán crater as viewed by NASA’s Lunar Reconnaissance Orbiter Camera, or LROC,
Credit: NASA/GSFC/Arizona State University
Scientific tasks
During the first lunar day (14 days in length), the lander and the rover photographed each other, and a camera installed on the top of the lander took 360-degree panoramic photos of the surrounding of the probe.
The Chang’e-4 mission carries four payloads developed by the Netherlands, Germany, Sweden and Saudi Arabia.
Scientific tasks of the farside exploration include low-frequency radio astronomical observation, surveying the terrain and landforms, detecting the mineral composition and shallow lunar surface structure, and measuring neutron radiation and neutral atoms.

Soviet Lunokhod rover
Credit: NASA/GSFC/Arizona State University
Washout
Yutu-2’s on again/off again surface treks sparked a comment from Ron Creel, Apollo Lunar Roving Vehicle Team Member.
“The ‘Lunar Nap’ that the Chinese vehicles are taking is most likely caused by ‘washout’ of visibility of lunar terrain for driving at times near lunar noon,” Creel told Inside Outer Space.
“This is what the Russians have shared with me that they also had to do the same driving pauses with their Lunokhods,” Creel advised. The former Soviet Union’s Lunokhod 1 rover was the first of two robotic lunar rovers that successfully landed on the Moon. It surveyed the Sea of Rains in 1970-1971. Lunokhod 2 wheeled about in Le Monnier crater in 1973.

