Archive for the ‘Space News’ Category

Photo credit: Lunar and Planetary Institute
David Criswell, 1941–2019
I lost a great friend and true space visionary. David Criswell passed away on September 10. He was 78 years old.
Over the decades of my journalistic career, I discussed with Criswell an incredible sweep of his creative thoughts regarding the utilization of space – in particular use of extraterrestrial materials for commercial usage and space settlements.
For example, his article in The Industrial Physicist, “Solar Power via the Moon” (April/May 2002), was the continuation of many years of dedicated service to the development of space resources for developing Third World Countries, seeking to develop a source of safe, efficient, and cost-effective energy for future generations of Earth’s inhabitants.
Criswell was passionate about a potential lunar solar power system that was designed to beam clean, renewable energy to Earth.
A celebration of David Criswell’s life will be held on Monday, October 14, at 2:00 p.m. at Bay Area Unitarian Universalist Church, 17503 El Camino Real in Houston, Texas.
Here’s an overview of Criswell and his professional career:
https://www.lpi.usra.edu/planetary_news/2019/09/23/in-memoriam-dr-david-r-criswell-1941-2019/
A watch and listen list includes:
Lunar Solar Power System – A video conversation with Dave Criswell
Published on Oct 21, 2013
https://www.youtube.com/watch?v=8lA-z-FCDLA
Also, go to David Livingston’s The Space Show Archive for conversations with David Criswell:

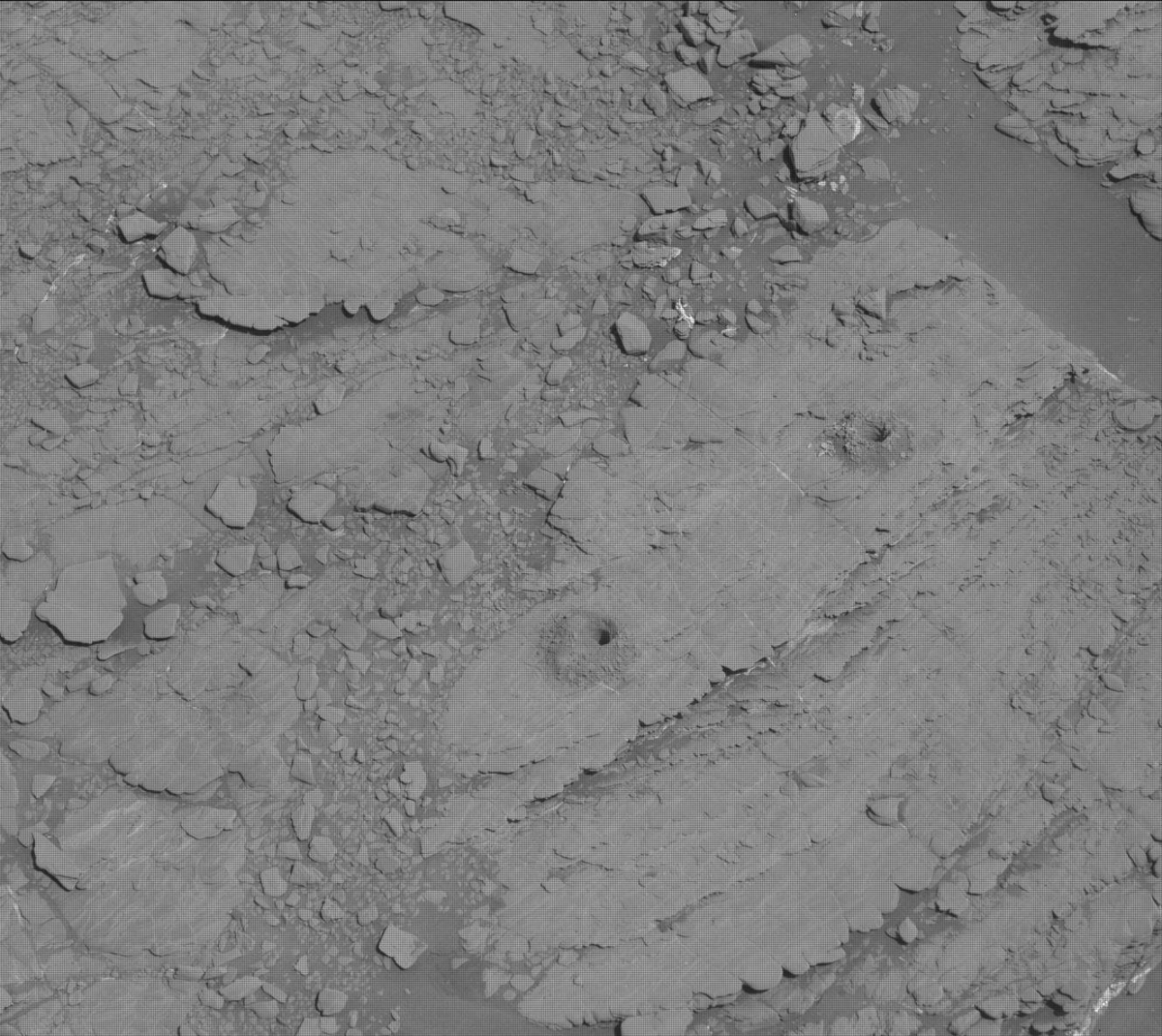
NASA’s Mars rover Curiosity acquired this image using its Mast Camera (Mastcam) on Sol 2529
Mastcam image, showing both Glen Etive drill holes, surrounded by “tailings” produced by the drilling process
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now in Sol 2533 mode.
Reports Catherine O’Connell-Cooper, Planetary Geologist at University of New Brunswick: “Planning for this past week has centered on analyzing the high potassium drill sample, Glen Etive 2, using the Sample Analysis at Mars (SAM) instrument.”
Portions of the drilled sample have been delivered to SAM and an evolved gas analysis (EGA) conducted.

Curiosity Mastcam Left photo image acquired on Sol 2531, September 19, 2019.
Credit: NASA/JPL-Caltech/MSSS
Wet chemistry
“This involved heating the sample to very high temperatures and measuring the gases that bake out of the sample with each temperature increment,” O’Connell-Cooper points out. Following the successful completion of the EGA, the plan called for a SAM uplink to clean the SAM Gas Chromatograph (GC) Columns, before some sample is transferred internally for a special wet chemistry experiment in the upcoming week’s plan.
The Chemistry and Mineralogy (CheMin) instrument will also do some preparation work in this plan, ahead of a planned sample drop-off to CheMin at the end of next week, O’Connell-Cooper notes.
“Although we wanted to dedicate most of Curiosity’s resources to the continuing Glen Etive analysis, the Geology theme group (GEO) managed to fit in some geology observations. ChemCam will analyze two targets, investigating soil and pebbles at ‘Kilpatrick’ and refining bedrock composition at ‘Glen Lyon.’

Curosity Front Hazcam Left B image taken on Sol 2531, September 19, 2019.
Credit: NASA/JPL-Caltech
Sand and bedrock
In addition to imaging the ChemCam targets to support geological interpretation, Mastcam will revisit the sol 2491 “change detection” target “Dundee.”
“This target contains both sand and bedrock,” O’Connell-Cooper explains, “making it easier to track small-scale changes, such as sand moving over bedrock. Although change detection studies track small particle movements, they are of immense use, helping us understand the larger picture, such as sand dune movement and changing wind regimes.”

Curiosity Navcam Right B photo acquired on Sol 2532, September 20, 2019.
Credit: NASA/JPL-Caltech
The Environmental Theme Group (ENV) will monitor large-scale surface changes, such as those due to strong winds and atmospheric vortices (dust devils), and look at broader environmental conditions (clouds, atmospheric dust) in Gale and beyond.
O’Connell-Cooper concludes that it has been a quiet week for APXS. “However, it is exciting to see SAM have a starring role this week, and we are eagerly anticipating the results from SAM and CheMin over the next few weeks!”

The lunar dust detector experiment. (a) Installation position of lunar dust detector, SQCM was fixed in a temperature-controlled cabinet (TCC) which was mounted on the front-left corner of the Chang’E-3 lander. Solar cell probe (SCP) was located externally on the top of the lander. The vertical heights of SQCM and SCP from the local lunar surface are 190 cm and 205 cm, respectively. (b) Schematic illustration of structure and assembly of SQCM. The field-of-view of SQCM sensor is a cone with a half angle of approximately 75 degrees. The CE-3 lander photograph was taken by panoramic camera onboard the Yutu-1 rover.
Credit: Detian Li, Et al.
China’s Chang’E‐3 lunar lander carried out an on-the-spot study of lunar dust at its landing site in the northern Mare Imbrium.
The lunar lander made a touchdown on December 14, 2013, later unleashing the Yutu-1 rover.
The lander was equipped with a temperature‐controlled sticky quartz crystal microbalance. Using this gear, the results showed that a total deposition mass at a height of 190 centimeters above the lunar surface during 12 lunar daytimes in the northern Mare Imbrium was about 0.0065 mg/cm2, corresponding to an annual deposition rate of ~21.4 μg/cm2 – which is comparable with that of Apollo’s result to some extent, the paper points out.
The research was led by Detian Li and Yi Wang of China’s Lanzhou Institute of Physics, detailed in the research paper – “In Situ Measurements of Lunar Dust at the Chang’E‐3 Landing Site in the Northern Mare Imbrium” – published in the Journal of Geophysical Research: Planets.
Environmental problem
“Lunar dust is regarded as the most crucial environmental problem on the Moon, and related research has crucially important scientific and technological interests,” the paper explains. This type of research is “strategically important for future human and robotic lunar expeditions, and can provide a valuable reference for the design of dust protection for onboard payloads long‐term exposure to the lunar environment.”
This work was unique as it was made on the lunar surface rather than in orbit.

Set of photographs taken during Chang’E-3 landing, taken by the landing camera at different heights before touchdown. (a) A peaceful lunar surface, in this case, the spacecraft was so high that the lunar surface could not be affected by the lander’s engine exhaust; (b, c and d) Display a disturbed lunar surface, especially for (d), where large amounts of lunar dust and debris were stirred up by the lander’s strong engine exhaust.
Credit: Detian Li, Et al.
Detrimental dust
In summary, the paper explains that Apollo astronauts pointed out that “dust is the number one environmental problem on the Moon” and “dust is the number one concern in returning to the Moon.”
“Dust on the lunar surface can be easily levitated and transported by several natural and anthropogenic causes, which can raise several detrimental problems for exploration activities,” Detian and his research colleagues note. “To date, however, the reports about in situ measurements of dust on the lunar near surface are comparatively few.”
To review the entire paper — “In Situ Measurements of Lunar Dust at the Chang’E‐3 Landing Site in the Northern Mare Imbrium” – go to:
https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/2019JE006054

Credit: ISRO
The attempted touchdown of India’s Vikram lunar lander near the Moon’s South Pole ended in failure on September 7th.

Credit: ISRO/Inside Outer Space Screengrab
In the meantime, how and why it failed has become the target of exploratory postings – some of which suggest the craft nose-dived into the lunar landscape at upwards of 180 miles per hour.
Loss of com
By way of its Chandrayaan-2 mission – an orbiter, lander/rover — India had hoped to become the 4th nation to make a soft landing on the Moon.
The Indian Space Research Organization (ISRO) noted on September 10th that the Vikram lander had been located by the camera-carrying orbiter of Chandrayaan-2, “but no communication with it yet. All possible efforts are being made to establish communication with lander.”
That Indian orbiter imagery has yet to be issued.

Credit: ISRO/Inside Outer Space Screengrab
Orbiter update
In a September 19th posting, ISRO explained that the Chandrayaan2 orbiter “continues to perform scheduled science experiments to complete satisfaction.”

India’s Chandrayaan-2 orbiter – up and operating.
Credit: ISRO
All payloads of the orbiter are powered. Initial trials for orbiter payloads have been successfully completed. Performance of all orbiter payloads is satisfactory. The orbiter continues to perform scheduled science experiments to complete satisfaction, ISRO explains.
Lastly, a National level committee consisting of academicians and ISRO experts are analyzing the cause of communication loss with the Vikram lander.

Credit: ISRO
Poor lighting conditions
Flying over the touchdown zone on September 17, NASA’s Lunar Reconnaissance Orbiter (LRO) did take new imagery in an attempt to spot the lander. NASA’s Lunar Reconnaissance Orbiter Camera (LROC) is a system of three cameras mounted on the LRO that capture high resolution photos of the lunar landscape. However, due to poor lighting conditions, chances of locating the lander were unfavorable.

On the lookout for India’s Moon lander, NASA’s Lunar Reconnaissance Orbiter (LRO).
Credit: NASA/GSFC
LRO will next fly over the landing site on October 14th – enjoying a more favorable lighting situation.
Field of view
Inside Outer Space has been provided NASA’s approved statement regarding the Lunar Reconnaissance Orbiter (LRO) with respect to looking for India’s Vikram lander.
“LRO flew over the area of the Vikram landing site on Sept. 17 when local lunar time was near dusk; large shadows covered much of the area. The Lunar Reconnaissance Orbiter Camera (LROC) acquired images around the targeted landing site, but the exact location of the lander was not known so the lander may not be in the camera field of view,” the NASA statement explains.

Projected Vikram lunar landing site in the highland plain between the craters Manzinus C and Simpelius N. Simpelius N crater is about 6 miles (9 kilometers) across.
Source: LROC Quickmap
Credit: Jatan Mehta/Moon Monday
Continuing, the statement says: “The LROC team will analyze these new images and compare them to previous images to see if the lander is visible (it may be in shadow or outside the imaged area). LRO will next fly over the landing site on October 14 when lighting conditions will be more favorable. NASA will make the results of the Sept. 17 flyover available as soon as possible after a necessary period of validation, analysis, and review.”
Speculative postings
Meanwhile, check out these postings:
How the Indian lunar lander was lost
https://sciblogs.co.nz/out-of-space/2019/09/09/how-the-indian-lunar-lander-was-lost/
What We Know About India’s Failed Lunar Landing
Based on the handful of public statements, and images from mission control it looks like braking from orbital velocity worked correctly, but the transition to fine control for descent may have resulted in a tumbling spacecraft which impacted the surface at about 100m/sec.

Space Launch System (SLS) Credit: NASA/MSFC
NASA is developing a trio of systems to put astronauts into space—the Orion crew vehicle, Space Launch System, and Exploration Ground Systems. NASA will need these systems for its human space exploration goals, including sending astronauts to the Moon as soon as 2024.
How is NASA managing these large and complex efforts? Past reports have noted that schedules were overly optimistic and that NASA’s reporting of cost growth for SLS and Orion is distorted.

Artist rendering of Lockheed Martin-built Orion spacecraft in deep space.
Credit: Lockheed Martin
For the latest developments, go to this House Hearing: Developing Core Capabilities for Deep Space Exploration: An Update on NASA’s SLS, Orion, and Exploration Ground Systems.
This hearing was staged by the House Space & Aeronautics Subcommittee on September 18, 2019.
Witness testimony:
- Kenneth Bowersox, NASA Acting Associate Administrator for Human Exploration and Operations
- Cristina Chaplain, Director, Contracting and National Security Acquisitions, U.S. Government Accountability Office
- Doug Cooke, Owner, Cooke Concepts and Solutions; Former Associate Administrator, Exploration Systems, NASA

Orion and ESA Service Module.
Credit: NASA/ESA/ATG/Medialab
Other resources
Also go to Rep. Frank Lucas’ Statement at Space Subcommittee Hearing on NASA’s SLS and Orion Programs at:
For the opening Statement of Rep. Brian Babin, go to:
For a video of the entire hearing, go to:

Lunar Reconnaissance Orbiter (LRO).
Credit: NASA/GSFC
NASA’s Lunar Reconnaissance Orbiter (LRO) has reportedly failed to spot India’s failed Chandrayaan-2 lunar lander.
Mark Carreau of Aerospace Daily & Defense Report says LRO’s Lunar Reconnaissance Orbiter Camera (LROC) on Sept. 17 imaged the intended lunar south pole landing site for India’s Chandrayaan-2 Vikram lander, “but long shadows in the area may be obscuring the silent lunar explorer.”
“It was near dusk as the region prepares to transition from a two-week lunar day to and equally long lunar night, so shadows covered much of the region and Vikram may not be in the LROC’s field of view,” citing a NASA statement.

India’s targeted site for Chandrayaan-2’s Vikram lander. Photo taken of area prior to landing attempt by NASA Lunar Reconnaissance Orbiter’s LROC camera.
Credit: NASA/GSFC/Arizona State University
Data sharing
In a statement provided to Inside Outer Space by Mark Robinson, LROC’s lead investigator at Arizona State University: “Per NASA policy, all LRO data are publicly available. NASA will share any before and after flyover imagery of the area around the targeted Chandrayaan-2 Vikram Lander landing site to support analysis by the Indian Space Research Organization.”
The statement also noted that on the September 17th LRO flyover of the area, local lunar time will be near dusk, “leading to poor lighting and a challenging imaging environment.”

Curiosity Mastcam Right image taken on Sol 2527, September 15, 2019.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is closing out Sol 2529 duties.
The Mars robot has scored its 23rd drill hole on Mars, reports Mark Salvatore, a planetary geologist at the University of Michigan. “Coming in at roughly 43 millimeters depth…and both the rover and new drill hole are happy and healthy!”
Salvatore noted that Curiosity drilled into the same block as a previous drill target over the weekend, reaching full drill depth with only a little percussion needed.
“The new drill hole is named, you guessed it, Glen Etive 2!”
Curiosity Mastcam Left p;hoto acquired on Sol 2528, September 16, 2019.
Credit: NASA/JPL-Caltech/MSSS
Drill hole, tailings
“Following the successful drilling this weekend,” Salvatore adds, “Curiosity spent lots of time documenting the new hole so that the science team could get to work on Monday morning with plans to characterize it. We’ll be planning all of the standard chemistry measurements of the drill hole and drill tailings starting on Wednesday.”
But first, Mars scientists plan to calibrate the Chemistry and Camera (ChemCam) instrument to prepare for all of this upcoming work.
Calibration activities
Salvatore points out that on Sol 2529, Curiosity was to calibrate its laser-induced breakdown spectrometer by measuring its titanium calibration target.
Curiosity Navcam Right B image acquired on Sol 2528, September 16, 2019.
Credit: NASA/JPL-Caltech
Then, on Sol 2530, the Mars robot will measure the imaging capabilities of the instrument by taking measurements of other calibration targets onboard the rover.
“These calibration activities take place every few weeks to make sure that the instruments are operating correctly and the data are as accurate as possible,” Salvatore explains. “By the time our chemistry measurements make it into Wednesday’s plan, we can be confident that ChemCam will continue to provide the fantastic data that it has been for the past seven years!”
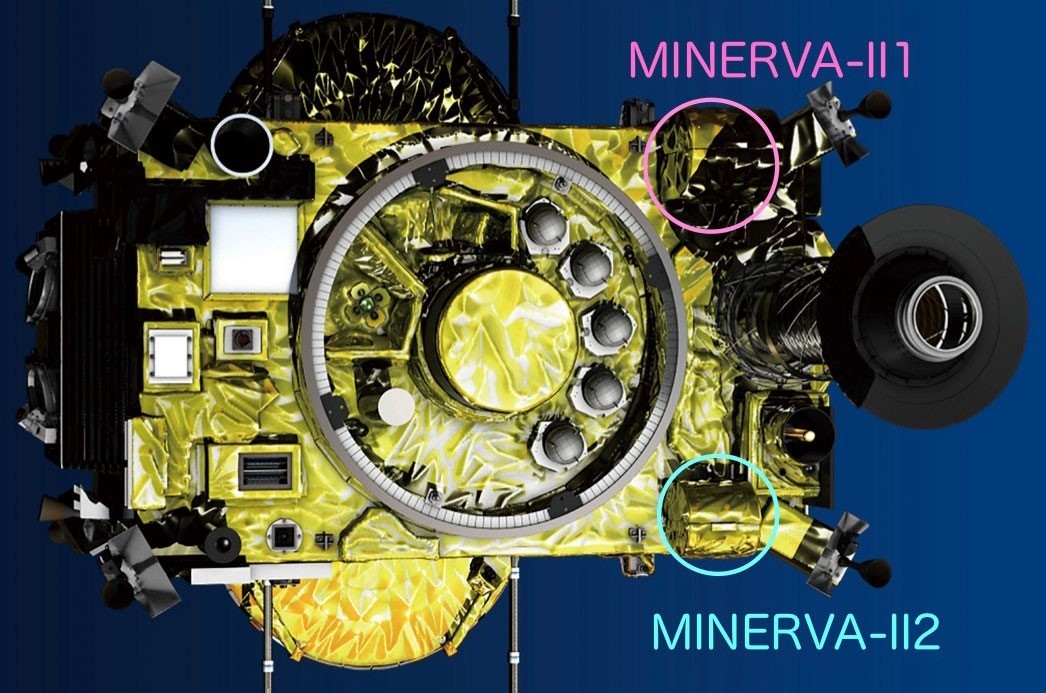
Credit: JAXA
Japan’s Hayabusa2 asteroid explorer is soon to dispatch a new robot onto space rock of ages, Ryugu.
The spacecraft is slated to unload the roughly 2.2 pounds (one kilogram) Minerva-II2 next month – a device equipped with a camera, thermometer, photodiode, and accelerometer.
Minerva is short for MIcro-Nano Experimental Robot Vehicle for Asteroid.
Credit: JAXA
This mobile robot was fabricated by a university consortium led by Tohoku University, co-developed with Tokyo Denki University, Osaka University, Yamagata University, and the Tokyo University of Science.
Hop and move
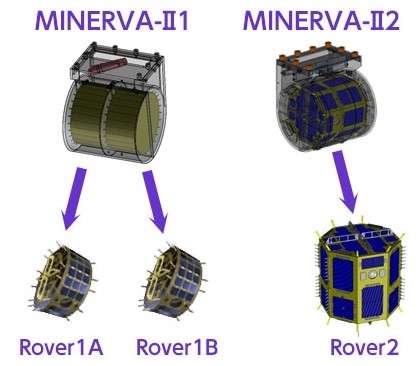
The MINERVA-II2 (Rover-2) exploration robot is designed to use various mobility techniques to hop and move across the asteroid’s surface.

Credit: JAXA
On launch back in early December 2014, Hayabusa2 was outfitted with four rovers: the Mobile Asteroid Surface Scout (MASCOT), Rover-1A, Rover-1B, and Rover-2. Since its rendezvous with asteroid Ryugu in June 2018, the spacecraft has successfully deployed all but Rover-2, still mounted in a container onboard the Japanese asteroid probe.
Target markers
As prelude to the release of Rover-2 in October, two target markers have already been dispatched to the asteroid. This target marker activity on September 17 served as a rehearsal for the separation operation of the Minerva-II2 Rover-2.
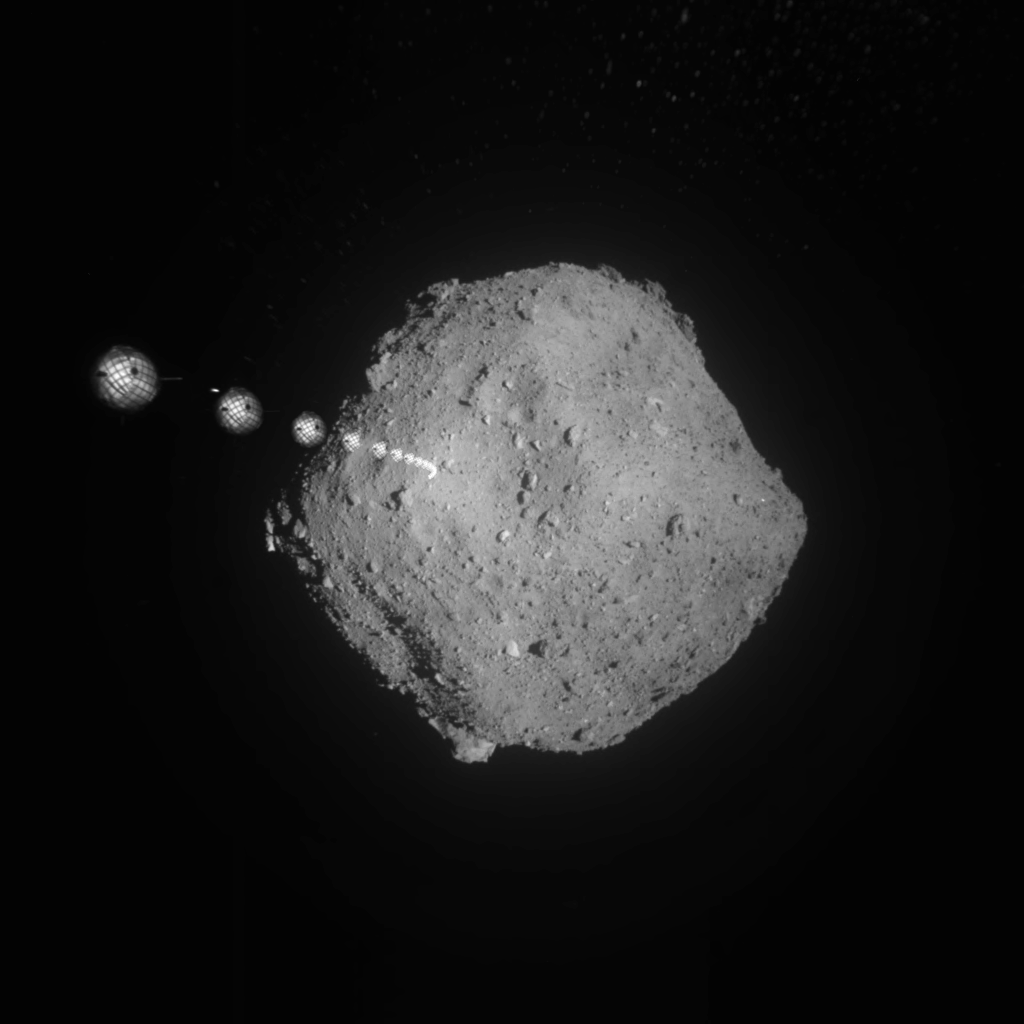
First of two target markers makes its way to asteroid Ryugu.
Credit: JAXA
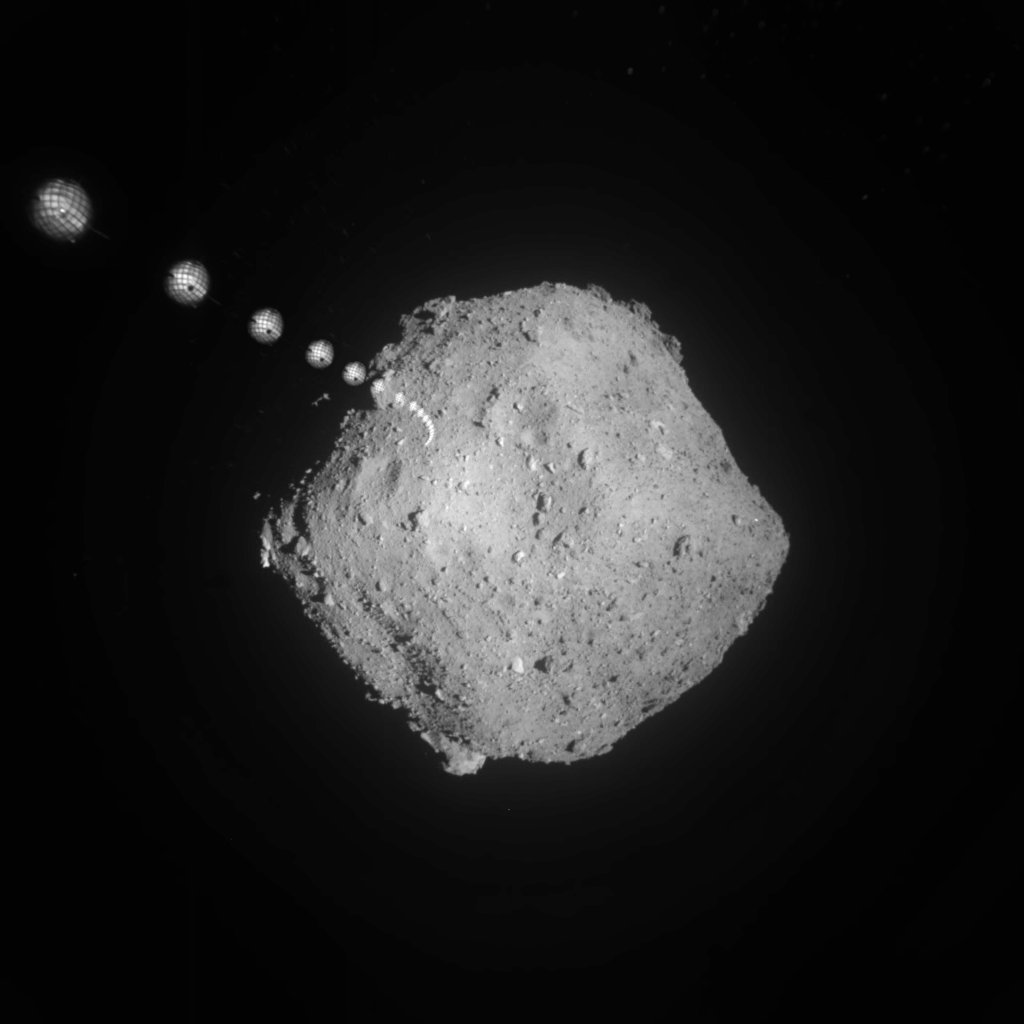
Target marker 2 en route to space rock.
Credit: JAXA
If all continues to go as planned, Hayabusa2 is slated for departure from the asteroid at year’s end, headed for return to Earth of asteroid specimens the pioneering probe has gathered at the end of 2020.
This spacecraft mission is under the direction of the Japan Aerospace Exploration Agency (JAXA).

Curiosity Mastcam Left photo acquired on Sol 2527, September 15, 2019.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now performing Sol 2529 duties.
Reports Vivian Sun, a planetary geologist at NASA’s Jet Propulsion Laboratory, it’s go for drilling at Glen Etive 2.

Curiosity Front Hazcam Right B image acquired on Sol 2528, September 16, 2019.
Credit: NASA/JPL-Caltech
“After studying the results from the ‘Glen Etive 1’ drill hole over conjunction, the team has decided to proceed with a second drill hole at a nearby location, dubbed “Glen Etive 2,” on the same rock slab,” Sun adds.
Rock composition
This second drill will allow scientists to do a more detailed set of Sample Analysis at Mars (SAM) Instrument Suite and Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) analyses to better understand the composition of this rock.

Curiosity Front Hazcam Left B image acquired on Sol 2527, September 15, 2019.
Credit: NASA/JPL-Caltech
“We kicked off the drilling campaign for Glen Etive 2 with a series of activities on Sols 2525 through 2528. On Sol 2525, we commenced with initial triaging of the Glen Etive 2 target, which included a preload test to help determine if the rock surface will be stable for drilling,” Sun explains.
Pebbly materials
To continue wrapping up observations from the first drill campaign, scientists also planned Alpha Particle X-Ray Spectrometer (APXS) observations over two pebbly areas near where the Glen Etive 1 sample was dumped.
“The APXS measurement of the Glen Etive 1 dump pile,” Sun points out, “included some pebbly materials in the field-of-view, so these extra measurements will help us tease out the true composition of the sample fines.”

The Curiosity science team has decided to proceed with a second drill hole at a nearby location, dubbed “Glen Etive 2,” on the same rock slab. NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI) on Sol 2525
Credit: NASA/JPL-Caltech/MSSS
Pre-drill imaging
A Sol 2525 preload test was successful, so Mars researchers moved forward with the full drill activity on Glen Etive 2 in the Sol 2526-2528 plan.
“This includes the requisite pre-drill imaging, as well as SAM and CheMin activities to prepare for ingestion and analyses of the Glen Etive 2 sample next week,” Sun reports.
Other rover activities included Mastcam multispectral documentation of both the Glen Etive 1 and future Glen Etive 2 drill holes, ChemCam observations of the Glen Etive 1 drill tailings and dump pile, and a suite of atmospheric monitoring observations.

Curiosity Mastcam Left photo acquired on Sol 2527, September 15, 2019.
Credit: NASA/JPL-Caltech/MSSS
Also planned were several activities focused on monitoring and maintaining Curiosity instruments, including Mars Hand Lens Imager (MAHLI) imaging of the Rover Environmental Monitoring Station (REMS) ultra-violet sensor and Mastcam imaging of the MAHLI magnet.
“Getting all of these activities into this packed weekend plan was quite the effort, but well worth it to get our next drill sample,” Sun concludes. “We can’t wait to see the results!”

Curiosity Navcam Right B photo taken on Sol 2528, September 16, 2019.
Credit: NASA/JPL-Caltech
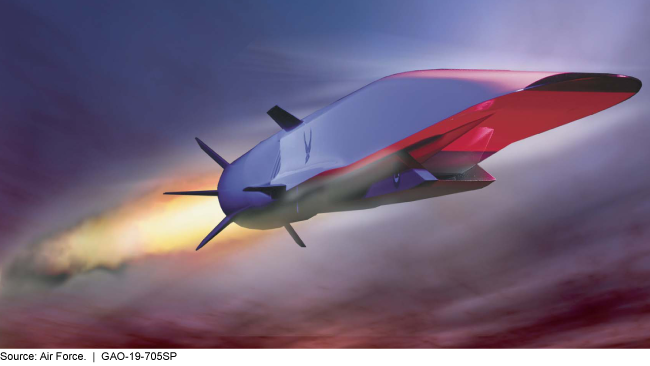
Credit: U.S. Air Force
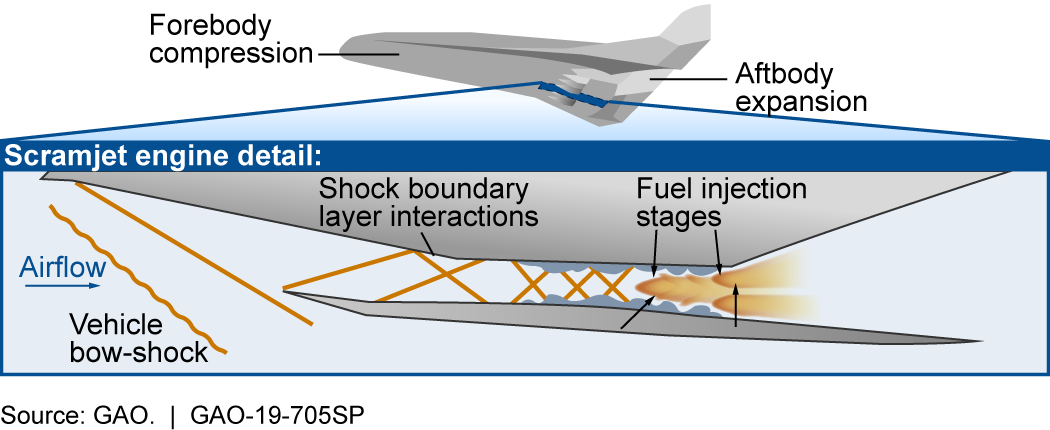
The U.S. Government Accountability Office (GAO) has issued a Science & Tech Spotlight on hypersonic weapons.
As the GAO spotlight notes, hypersonic weapons, once developed, would fly faster than 3,800 mph and be extremely difficult to defend against.
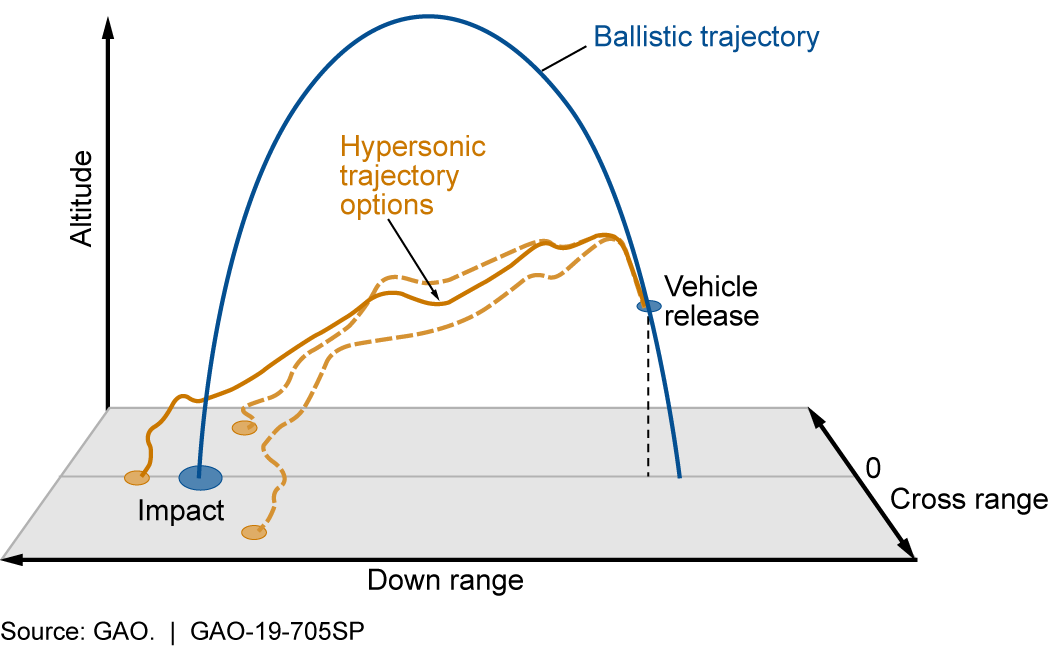
Credit: GAO
“Advances in hypersonic technologies have significant implications for national security, as well as for transportation and space systems,” the GAO reports. “Research and development of offensive and defensive capabilities in hypersonics is and will remain critically important.”
Credit: GAO
Hypersonic weapon want-to-haves
Along with CRS staff inputs, the spotlight has been reviewed by Timothy Persons, Chief Scientist of the GAO, pointing out that hypersonic weapons are expected to:
- Fly at least 3,800 mph (about 5 times the speed of sound)
- Fly at lower altitudes than ballistic missiles
- Be highly maneuverable
- Be able to change targets during flight
- Be extremely difficult to defend against
But what are the implications of the commercialization of hypersonic technologies and vehicles?
Go to this GAO appraisal at:

