Archive for the ‘Space News’ Category

VIPER on the prowl.
Credit: NASA
NASA’s go-getting Artemis plan for returning humans to Earth’s Moon in 2024, as well as kick-off an era of sustainable lunar operations, calls for resource extraction and utilization. Turning on the tap of lunar water ice is viewed by many as the elixir of life to support human outposts. This extraterrestrial supply can be altered into oxygen, drinking water, even rocket fuel.

A Lunar Terrain Vehicle (LTV) will be a human-rated, unpressurized (unenclosed) rover that will be used to help astronauts explore and conduct experiments at the lunar South Pole.
Although water ice has been detected at the Moon’s poles, there remains a paucity of in-depth scientific information to truly tag the Moon as a water-rich world. Then there is the irksome question of “economically” extracting that resource – if present and accounted for in the first place. So there are major fundamental unknowns.
Go to my new Scientific American story, NASA’s Hunt for Lunar Water Intensifies, at:
https://www.scientificamerican.com/article/nasas-hunt-for-lunar-water-intensifies/

Curiosity Right B Navigation Camera image taken on Sol 2800, June 22, 2020.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover has just started performing Sol 2802 duties.

Curiosity Left B Navigation Camera image acquired on Sol 2800, June 22, 2020.
Credit: NASA/JPL-Caltech
Reports Scott Guzewich, an atmospheric scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland: “Bloodstone Hill continued to present a challenge to us over the weekend, when our second attempt to reach an ideal spot for contact science failed. The hill is steep and rocky, making it harder to gain traction.”

Curiosity Left B Navigation Camera image acquired on Sol 2800, June 22, 2020.
Credit: NASA/JPL-Caltech
But ultimately, the sulfate unit is more of a priority to the science team, so the rover will be leaving Bloodstone Hill behind and continuing its journey.

Curiosity Left B Navigation Camera image acquired on Sol 2800, June 22, 2020.
Credit: NASA/JPL-Caltech
Current workspace
Recently, discussion centered on whether to try again or use the bedrock that was available in the current workspace for contact science.
After finding that the robot’s position was stable for contact science, quickly identified was a suitable location for analysis by the Alpha Particle X-Ray Spectrometer (APXS) and the Mars Hand Lens Imager (MAHLI).

Credit: NASA/JPL-Caltech/Univ. of Arizona
Peak season
Beyond the contact science, there’s a busy plan scripted with three Chemistry and Camera (ChemCam) Laser Induced Breakdown Spectroscopy (LIBS) targets and a large Mastcam mosaic of the layers in Bloodstone Hill, notes Guzewich
Also on tap is a dust devil movie and two images of the crater rim to monitor dust in the atmosphere.

Curiosity Front Hazard Avoidance Camera Right B image taken on Sol 2801, June 23, 2020.
Credit: NASA/JPL-Caltech
“We’re seeing lots of dust devil activity lately,” Guzewich concludes, “as we’re in the peak season for them on Mars and also seem to be near an area that is conducive for their formation.”
New road map
This map shows the route driven by NASA’s Mars rover Curiosity through the 2800 Martian day, or sol, of the rover’s mission on Mars (June 22, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2797 to Sol 2800, Curiosity had driven a straight line distance of about 7.63 feet (2.33 meters), bringing the rover’s total odometry for the mission to 14.07 miles (22.65 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Curiosity Left B Navigation Camera image acquired on Sol 2800, June 22, 2020.
Credit: NASA/JPL-Caltech

Curiosity Left B Navigation Camera image acquired on Sol 2800, June 22, 2020.
Credit: NASA/JPL-Caltech

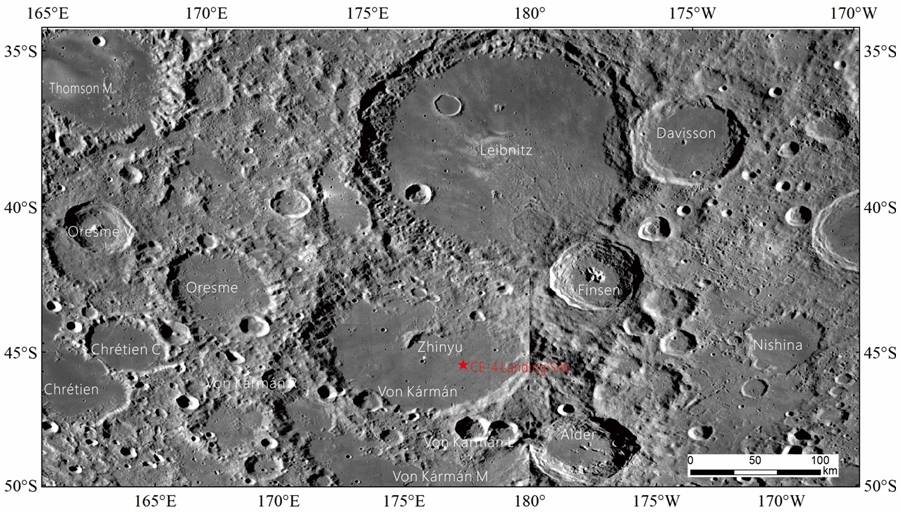
Chang’e-4 landing site
The substance found on the farside of the Moon by China’s lunar rover Yutu-2 might be breccia, experts at the Beijing Aerospace Control Center have stated according to China Central Television (CCTV).

China’s champion – long duration Yutu-2 rover.
Credit: CNSA/CLEP
During the eighth lunar day of exploration, the Yutu-2 rover found colloidal substance in a pit on the Moon’s surface, and after further research, experts believe that it might be breccia formed by impact.
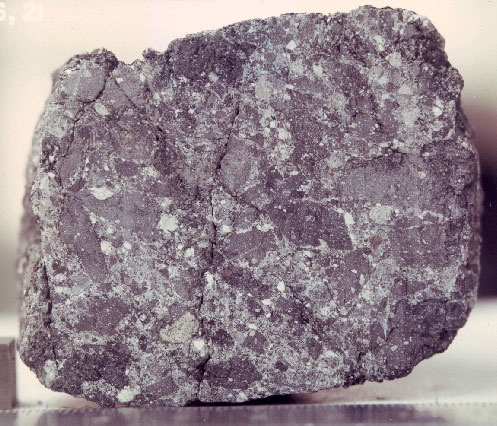
Sawn surface of fragmental lunar breccia 14306 illustrating the nature of lunar brcccias. This is a sample of the Fra Mauro Formation and is typical of ejecta from large basins. Credit: NASA photo no. 72-22103
Smashing, melting and mixing
Lunar breccias are rocks produced by the smashing, melting, and mixing of the lunar surface materials by large and small meteoric impacts. Most of the breccias returned by the Apollo missions were formed in the ancient lunar highlands about 3,900 to 4,000 million years ago.
Up to now, Yutu-2 rover has worked on the Moon’s farside for 18 lunar days.
China’s Chang’e-4 probe and Yutu-2 rover resumed work on June 15, and entered their 19th lunar day of exploration.

SETI searches have the potential to detect whether the neighboring M31 Andromeda Galaxy is a locale of advanced technology and civilizations.
Credit: Bill Schoening, Vanessa Harvey/REU program/NOAO/AURA/NSF
Detecting other starfolk out there isn’t easy. But new research is focused on far out reflecting solar panels, and evidence of extraterrestrial industrial activity – measurements to produce the first entries for an online technosignatures library.
The first Search for Extraterrestrial Intelligence (SETI)-specific NASA grant in over three decades has been awarded to Harvard & Smithsonian and the University of Rochester – a project to search the universe for signs of life via technosignatures.
The study, “Characterizing Atmospheric Technosignatures,” will initially focus on searching for two particular signatures that may indicate the presence of technological activities on extrasolar planetary bodies: solar panels and pollutants!

Credit: Center for Astrophysics/Harvard & Smithsonian
Solar power signature
“If a civilization wants to illuminate or warm up the night side, they would place photovoltaic cells on the day side and transfer the electric power gained to the night side,” said Adam Frank, a professor of physics and astronomy at the University of Rochester, and the primary recipient of the grant.
Frank feels that now we know where to look. There are thousands of exoplanets including planets in the habitable zone where life can form. “The game has changed,” he believes.
Frank adds in a press statement: “Our job is to say, ‘this wavelength band’ is where you would see sunlight reflected off solar panels. This way astronomers observing a distant exoplanet will know where and what to look for if they’re searching for technosignatures.”

Credit: NASA’s Goddard Space Flight Center
Industrial activity
“My hope is that, using this grant, we will quantify new ways to probe signs of alien technological civilizations that are similar to or much more advanced than our own,” says Avi Loeb, Frank B. Baird Jr. Professor of Science at Harvard.
The other signature tactic is to survey planetary atmospheres that might show detectable signs of artificially produced molecules that nature is very unlikely to produce spontaneously, such as chlorofluorocarbons (CFCs). The presence of CFCs—or refrigerant—therefore, could indicate the presence of industrial activity.
Technosignatures library
Loeb, Frank, and Jason Wright of Penn State University are joined by Mansavi Lingam of the Florida Institute of Technology, and Jacob Haqq-Misra of Blue Marble Space.
The study aims to eventually produce the first entries for an online technosignatures library.
For more information, go to:

Webinar:
Mars Exploration: Blueprint for the Red Planet
Wednesday, June 24 at 3:30 p.m. Eastern
Author and award-winning space journalist Leonard David and SpaceNews Editor-in-Chief Brian Berger will be joined by the director of NASA’s Mars Exploration Program and the project scientist for the soon-to-launch Mars 2020 Perseverance rover mission to discuss the status of the mission, next steps in robotic exploration, and how it leads to sending humans to Mars.
Guests
Jim Watzin
Director – Mars Exploration Program
NASA Headquarters
Ken Farley
Project Scientist, Mars 2020 Perseverance rover
Jet Propulsion Laboratory
Richard (Rick) Davis, Jr.,
Assistant Director for Science and Exploration
NASA Headquarters
Advanced registration required.
Go to:
https://spacenews.com/webinar-mars-exploration-blueprint-for-the-red-planet/

Curiosity Mast Camera Left photo of Bloodstone Hill, taken on Sol 2795, June 17, 2020.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now conducting Sol 2798 tasks and has reached the 14.0 mile (22.53 kilometers) mark since landing in August 2012.
Following a recent drive, Curiosity has wheeled closer to “Bloodstone Hill.”

Curiosity Left B Navigation Camera image taken on Sol 2796, June 18, 2020.
Credit: NASA/JPL-Caltech
Perfect spot
Another scheduled drive of the rover is to put it in a perfect spot to conduct contact science in the upcoming weekend plan with arm instruments – the Mars Hand Lens Imager (MAHLI), the Dust Removal Tool (DRT), and the Alpha Particle X-Ray Spectrometer (APXS), reports Rachel Kronyak, a planetary geologist at NASA’s Jet Propulsion Laboratory.

Curiosity Left B Navigation Camera image taken on Sol 2796, June 18, 2020.
Credit: NASA/JPL-Caltech
Curiosity was scheduled to utilize a suite of remote sensing observations to document its surroundings as it approached Bloodstone Hill.

Curiosity Left B Navigation Camera image taken on Sol 2796, June 18, 2020.
Credit: NASA/JPL-Caltech

Credit: NASA/JPL-Caltech/Univ. of Arizona
Nodular-rich bedrock
On the first sol of a recently scripted plan, Mars scientists filled a science block with three Chemistry and Camera (ChemCam) targets: two nodular-rich bedrock targets (“Dry Harbour” and “Embra”) and bedrock target “Ormiston.”
“Following ChemCam, we’ll document Dry Harbour and Ormiston with a single Mastcam documentation image since the targets are in close proximity to one another,” Kronyak adds. “We’ll document the Embra target as part of a larger mosaic to investigate a nearby trough feature. We also planned for a large Mastcam stereo mosaic to capture our view of Bloodstone Hill from our current parking spot. Following our science block, Curiosity will drive the last leg to Bloodstone Hill and collect post-drive images to document our new surroundings.”
Auto-identify
On the second sol of a recently scripted plan, ChemCam was set to collect data on three targets at its new location.
“ChemCam is able to do this using its Autonomous Exploration for Gathering Increased Science (AEGIS) mode,” Kronyak points out. “The AEGIS software allows the rover to automatically identify targets near the rover and collect geochemical data. Having these three additional ChemCam targets will bolster our geochemical dataset at Bloodstone Hill.”
Road map
A new rover road map shows the route driven by NASA’s Mars rover Curiosity through the 2793 Martian day, or sol, of the rover’s mission on Mars (June 15, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2790 to Sol 2793, Curiosity had driven a straight line distance of about 155.23 feet (47.31 meters), bringing the rover’s total odometry for the mission to 14.0 miles (22.53 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Curiosity Left B Navigation Camera image taken on Sol 2796, June 18, 2020.
Credit: NASA/JPL-Caltech

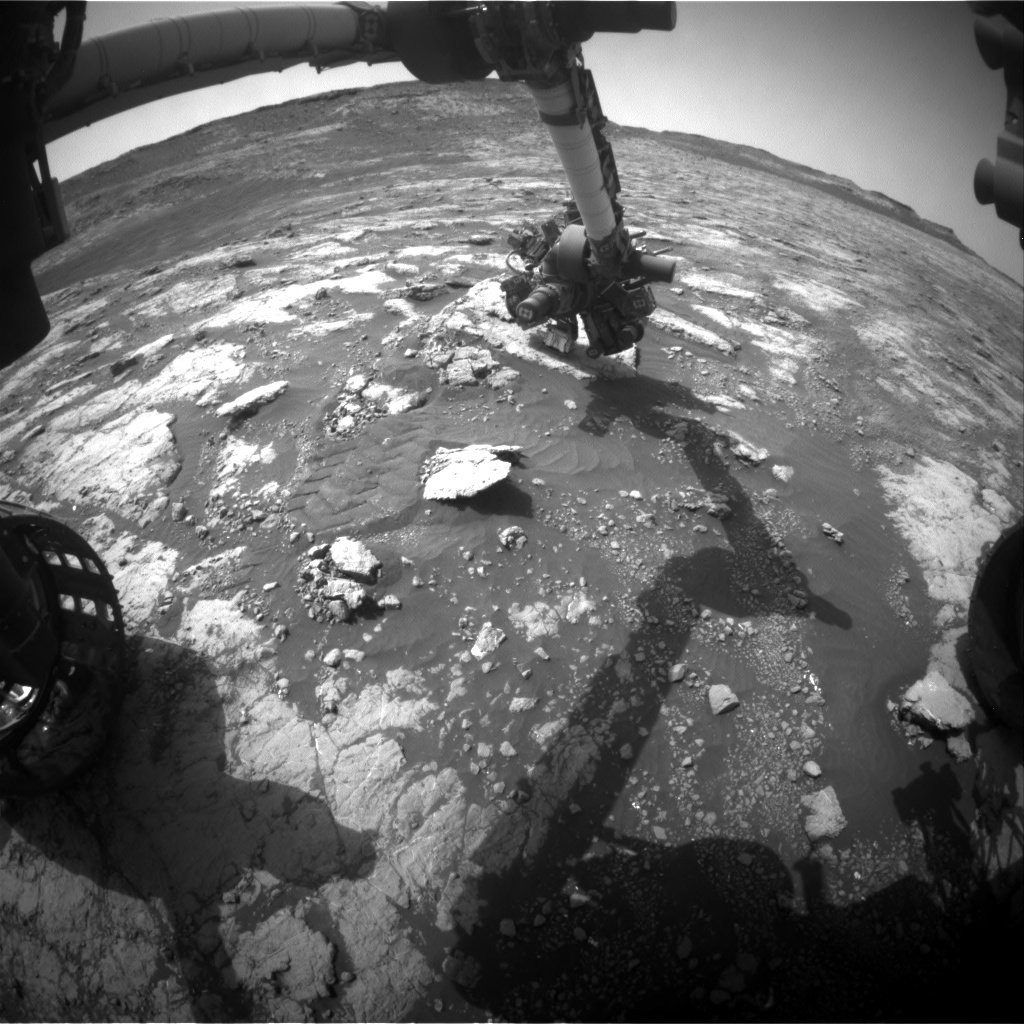
Curiosity Front Hazard Avoidance Camera Left B image acquired on Sol 2796, June 17, 2020.
Credit: NASA/JPL-Caltech
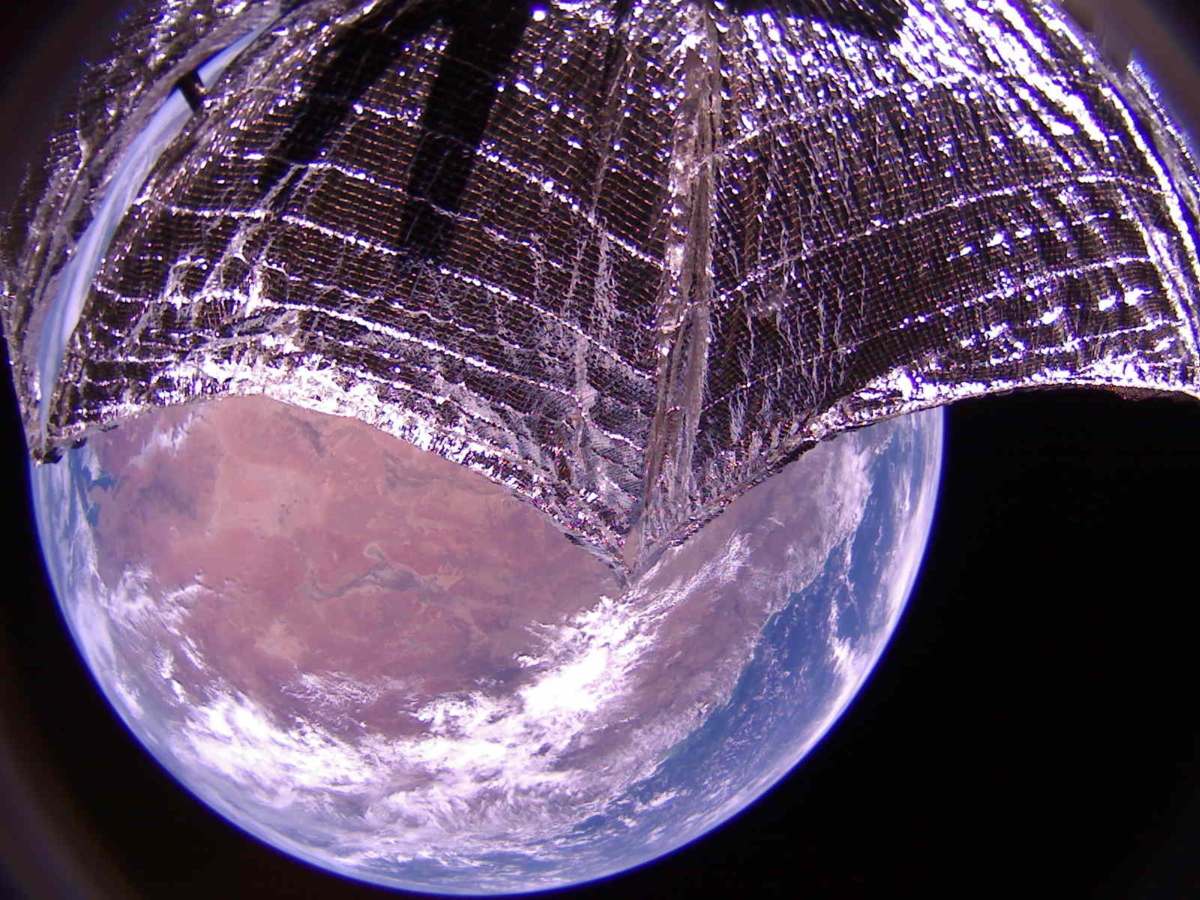
Credit: The Planetary Society
One year after launching into space, The Planetary Society’s LightSail 2 spacecraft has completed its primary mission phase and is embarking on an extended mission starting next week, dedicated to further advancing solar sailing technology.
LightSail 2 remains healthy, except for a few minor problems.
According to The Planetary Society’s website, images show one of the tape measure-like sail booms has buckled, and an analysis of shadows from the spacecraft’s solar panels shows that one panel is not fully deployed.

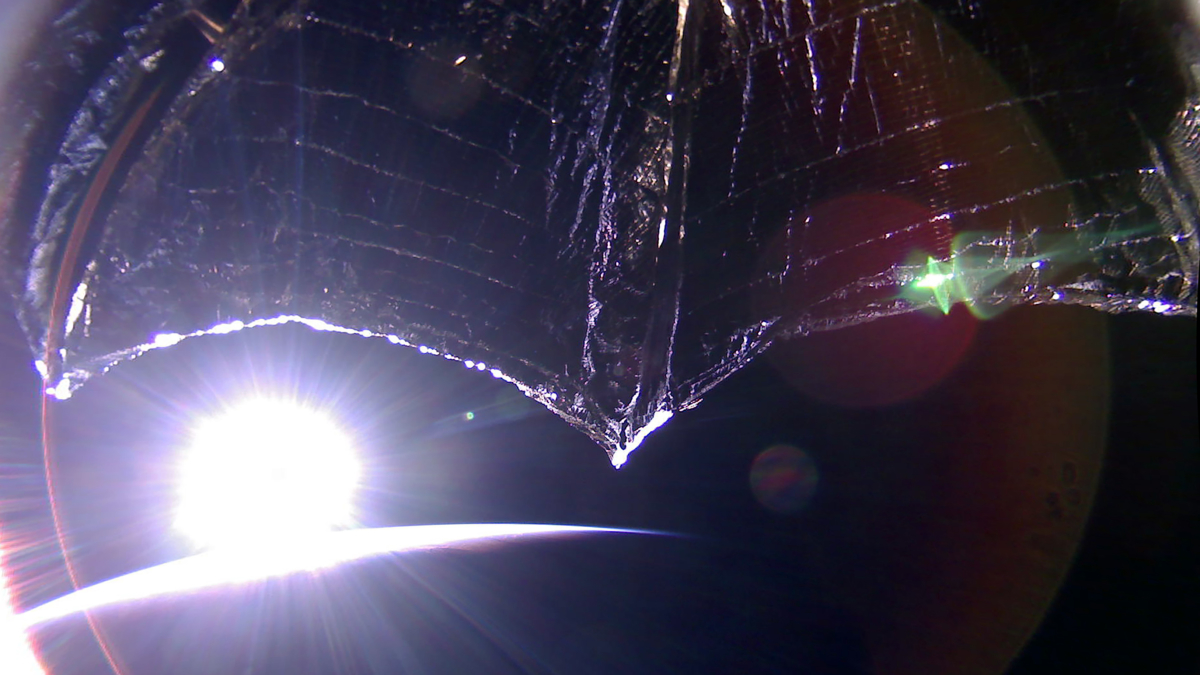
Credit: The Planetary Society
However, these issues have not greatly impacted LightSail 2’s solar sailing performance.
The LightSail 2 extended mission begins on June 25, 2020.
Extended mission
The goals of the extended mission include:
— Continue to tune LightSail 2’s solar sail performance
— Learn more about solar sailing operation through the study of various operational refinements and orbital evolution in response to sail control
— Continue taking pictures for public outreach and engineering analyses, including to study sail, boom, and spacecraft evolution
— Implement deorbit studies of sail dynamics with the sail acting as a drag sail
— Test a ground-based fault protection algorithm being developed by Purdue University Ph.D. student Justin Mansell
— Continue to share information about the mission and what we are learning from it with the technical community and the public, through peer-reviewed journal articles, conference presentations, direct contact with future solar sailing missions, web articles, and social media.
Credit: The Planetary Society
Participation opportunity
You’re invited to join CEO Bill Nye and the LightSail 2 mission team to celebrate the end of LightSail 2’s primary mission and the beginning of extended operations.
To participate on Thursday, June 25, 2020, register here at:
https://register.gotowebinar.com/register/5749726040769866253
For more information on LightSail 2, go to:
https://www.planetary.org/explore/projects/lightsail-solar-sailing/

The U.S. Secretary for Defense has released the Defense Space Strategy, which identifies how Department of Defense will advance spacepower to be able to compete, deter and win in a complex security environment characterized by great power competition.
The Department of Defense (DoD) is embarking on the most significant transformation in the history of the U.S. national security space program.
Space is now a distinct warfighting domain, demanding enterprise-wide changes to policies, strategies, operations, investments, capabilities, and expertise for a new strategic environment. This strategy identifies how DoD will advance spacepower to enable the Department to compete, deter, and win in a complex security environment characterized by great power competition.
For the summary of this report, go to:
Also, a fact sheet is available at:
China’s champion – long duration Yutu-2 rover.
Credit: CNSA/CLEP
China’s lunar rover Yutu-2 and Chang’e-4 lander autonomously came back to life on June 15, and entered their 19th lunar day of activity on the farside of the Moon. A day on the Moon lasts as long as 29.5 Earth days.

China’s Chang’e-4 lander as viewed by Yutu-2 rover.
Credit: CNSA/CLEP
Since the Chang’e-4 probe made the first-ever soft landing within the Von Kármán crater in the South Pole-Aitken Basin in early January 2019, it has been working for nearly a year and a half, and continues to relay new images of the lunar surface.

Movement of the Chang’e 4 rover, Yutu-2, captured in NASA’s Lunar Reconnaissance Orbiter’s LROC images.
Credit: NASA/GSFC/Arizona State University
Crater examination
According to the China Global Television Network (CGTV), based on the data obtained on the 17th lunar day, the Yutu-2 science team identified a nearby crater for examination.
With a small diameter of about 4.2 feet (1.3 meters) and a depth of not more than 8 inches (20 centimeters), the crater was found at about 10 feet (3 meters) southwest of the current position of the 6-wheeled Yutu-2 lunar rover.

Credit: CNAS/CLEP
There are reflective materials in the center of the crater, which is obviously different from the brightness of the surrounding lunar soil, according to a Xinhua news report.
Deep space control stations
In order to provide communications support for China’s first Mars exploration mission, the two deep-space observation and control stations in Jiamusi and Kashi, China, were officially completed on June 13 after over a month’s transformation.
Communications have returned to normal and continue to support Yutu-2, according to China Lunar Exploration Program (CLEP).
Scientific discoveries
According to China Central Television (CCTV), the lunar probe and rover have accomplished a series of important scientific discoveries.

Credit: CCTV/Inside Outer Space screen grab
The rover’s Lunar Penetrating Radar was used to study the geological structure with a depth of over 130 feet (40 meters), unveiling the secrets buried under the surface of the farside of the Moon, enriching understanding of the history of celestial collisions and volcanic activities and shedding new light on the geological evolution of the Moon.
Scientists also analyzed the data of the infrared imaging spectrometer on Yutu-2 and revealed the material composition on the Moon’s farside, verifying that the lunar mantle is rich in olivine, which deepens the understanding of the formation and evolution of the Moon.

Credit: CCTV/Inside Outer Space screengrab
Marching northwest
Explains Shen Zhenrong, chief designer of the Yutu-2 rover: “This rover will mainly work on a course to the northwest during this lunar day. First it will explore a plot of lunar soil in which scientists are interested, mainly using infrared imaging spectrometer and panoramic camera. Then it will continue marching toward northwest.”

Credit: CCTV/Inside Outer Space screengrab
Wu Xueying, deputy chief designer of Yutu-2 rover adds: “Suppose you land on the nearside, it’s simply a plain. But if you go to the farside, it would be like entering high mountains in valleys.”
Rough terrains
Scientifically speaking, Shen says, the rover is expected to go for environments featuring relatively rich geological terrains, which is to say rough terrains. They might offer richer geological information, hence more scientific findings. But from an engineering perspective, considering the safety of the rover, it might be safer to choose a route that is relatively smoother, with flatter slope and fewer rocks.”

Yutu-2 rover (Jade Rabbit-2).
Credit: CNAS/CLEP
“Each step it makes involves a local planning, which is done according to the images of the surroundings formed by the camera carried by rover itself, then transmitted back to the ground where 3D images are restored. Then we map out a relatively safe path based on the rover’s traveling capability,” Shen notes.
Go to this CCTV news agency video detailing China’s Chang’e-4 mission at:

Curiosity Mars Hand Lens Imager photo produced on Sol 2793, June 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now performing Sol 2795 tasks.

Bloodstone Hill – Curiosity Mast Camera Left image acquired on Sol 2793, June 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
Reports Kristen Bennett, a planetary geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona:
“A few months ago, Curiosity drove up on top of the ‘Greenheugh pediment’ to investigate the capping unit that is visible on top. After Curiosity drove off the pediment, the rover has been driving along the base of the pediment scarp and is about to reach the eastern edge. An interesting feature that is located at the eastern edge of the pediment is called ‘Bloodstone Hill’ – a light-toned mound that the team has been observing in long distance images for the entire mission.”

Curiosity Mast Camera Left image acquired on Sol 2793, June 14, 2020.
Credit: NASA/JPL-Caltech/MSSS
Questions raised
Bennett adds that Bloodstone Hill was even visible from Curiosity’s landing site!
“This light-toned mound is located right at the edge of the pediment, although it does not appear to have the pediment capping unit on top. Bloodstone Hill caught the team’s attention because it is so bright, which raises many questions,” Bennett explains.
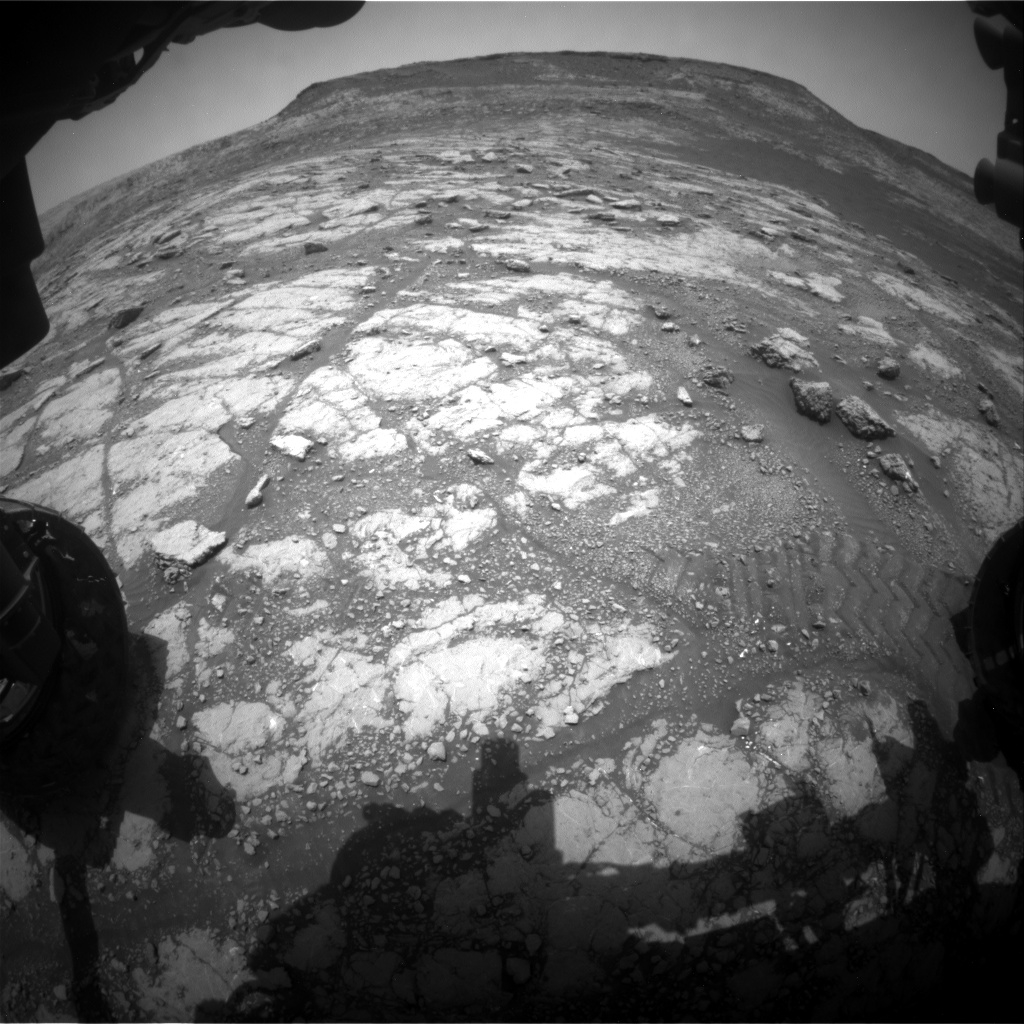
Curiosity Front Hazard Avoidance Camera Left B image taken on Sol 2794, June 15, 2020.
Credit: NASA/JPL-Caltech
Is it bright because it is covered in dust…a different mineralogy…a different alteration history?
“Now Curiosity is approaching Bloodstone Hill, and we can start answering some of these questions,” Bennett says.
Curiosity Front Hazard Avoidance Camera Left B photo taken on Sol 2793, June 14, 2020.
Credit: NASA/JPL-Caltech
Multispectral mosaic
A new plan has as the main event a long drive that will place Curiosity close to the base of Bloodstone Hill.
Another important piece of the plan is the Mastcam multispectral mosaic that will be taken of Bloodstone Hill.
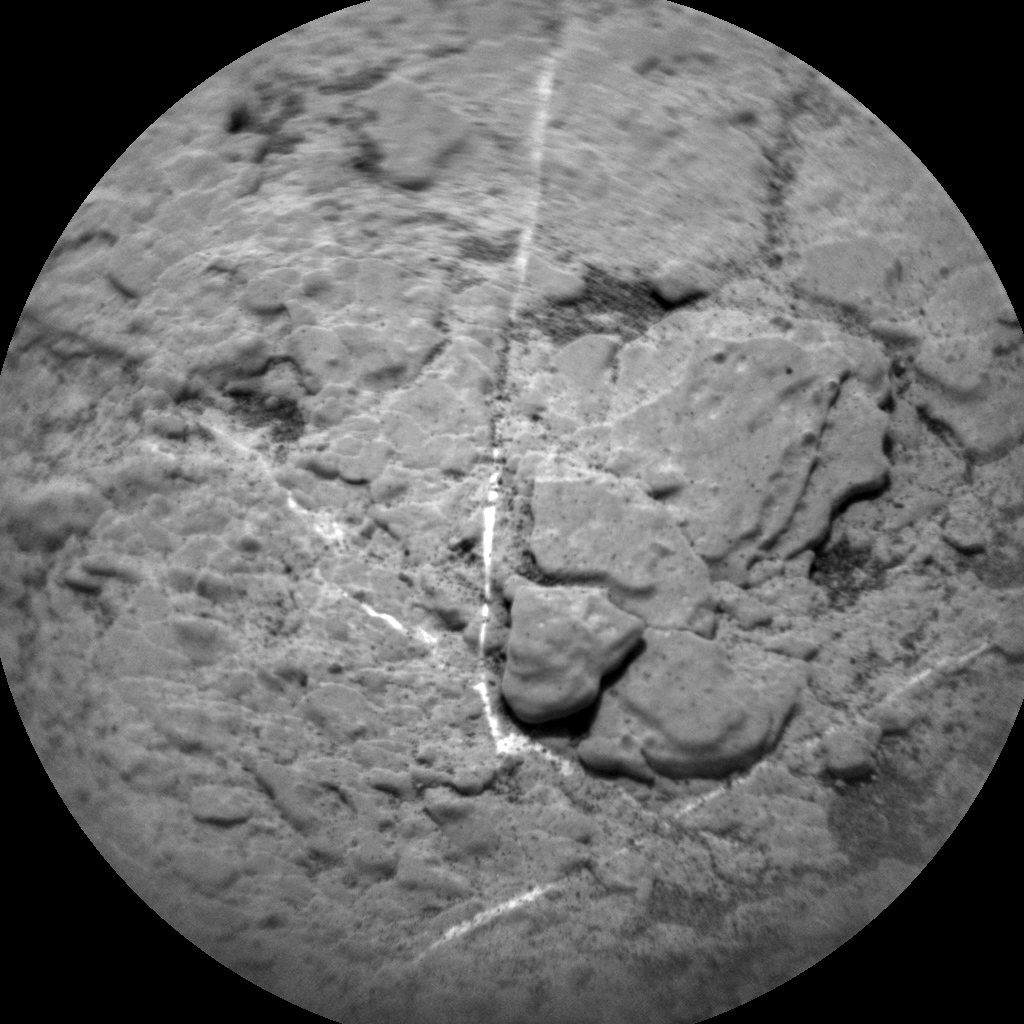
Curiosity Chemistry & Camera Remote Micro-Imager (RMI) photo acquired on Sol 2794, June 15, 2020.
Credit: NASA/JPL-Caltech/LANL
“As we approach this feature,” Bennett continues, “the team is gathering more data that will help us plan our investigation at this location. Multispectral observations can help identify variations in color and/or mineralogy across the outcrop. If the multispectral mosaic reveals any interesting variations, we can target those areas once we arrive at Bloodstone Hill.”
Nodule-rich bedrock
Additionally, several other Mastcam observations in the plan will document fractures or troughs between bedrock patches as well as the contact between the pediment capping unit and the strata below.
Credit: NASA/JPL-Caltech/Univ. of Arizona
The rover’s Chemistry and Camera (ChemCam) will also target “Earlish” to investigate the chemistry of nodule-rich bedrock in this area.
Lastly, a Mars Descent Imager (MARDI) image will be taken after the drive to document the terrain underneath the rover, Bennett concludes.
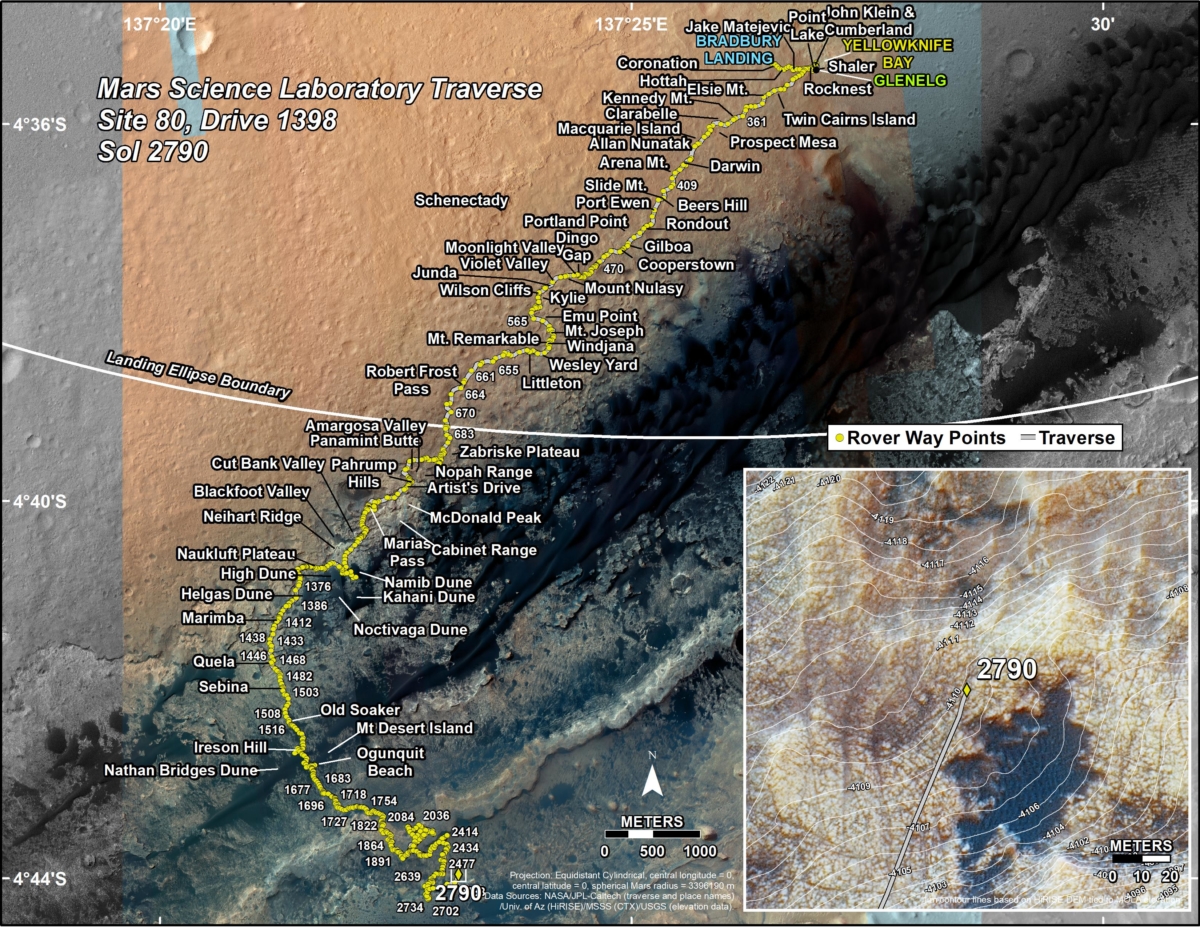
New road map
A newly issued map shows the route driven by NASA’s Mars rover Curiosity through the 2790 Martian day, or sol, of the rover’s mission on Mars (June 12, 2020).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2788 to Sol 2790, Curiosity had driven a straight line distance of about 308.42 feet (94.01 meters), bringing the rover’s total odometry for the mission to 13.97 miles (22.48 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

