Archive for the ‘Space News’ Category

Encapsulated X-37B Orbital Test Vehicle for U.S. Space Force-7 mission, now in Earth orbit.
Credit: Boeing
That secretive U.S. military X-37B robotic space drone has now chalked up more than 445 days in Earth orbit.
The Orbital Test Vehicle (OTV-6), also called USSF-7 for the U.S. Space Force, was launched on May 17, 2020 by an Atlas-V 501 booster.
OTV-6 is the first to use a service module to host experiments. The service module is an attachment to the aft of the vehicle that allows additional experimental payload capability to be carried to orbit.

Credit: Boeing/Inside Outer Space Screengrab
Track record
OTV-1 launched on April 22, 2010 and landed on December 3, 2010, spending over 224 days on orbit.
OTV-2 launched on March 5, 2011 and landed on June 16, 2012, spending over 468 days on orbit.
OTV-3 launched on December 11, 2012 and landed on October 17, 2014, spending over 674 days on-orbit.
OTV-4 launched on May 20, 2015 and landed on May 7, 2015, spending nearly 718 days on-orbit.
OTV-5 launched on September 7, 2017 and landed on October 27, 2019, spending nearly 780 days on-orbit.
OTV-1, OTV-2, and OTV-3 missions landed at Vandenberg Air Force Base, California, while the OTV-4 and OTV-5 missions landed at Kennedy Space Center, Florida.

Post-landing of OTV-5 at NASA’s Kennedy Space Center Shuttle Landing Facility.
Courtesy Photo 45th Space Wing Public Affairs
Onboard experiments
One experiment onboard the space plane that was announced pre-launch is from the U.S. Naval Research Laboratory (NRL), an investigation into transforming solar power into radio frequency microwave energy. The experiment itself is called the Photovoltaic Radio-frequency Antenna Module, PRAM for short.
Along with toting NRL’s PRAM into Earth orbit, the X-37B also deployed the FalconSat-8, a small satellite developed by the U.S. Air Force Academy and sponsored by the Air Force Research Laboratory to conduct several experiments on orbit.
The FalconSat-8 is an educational platform that will carry five experimental payloads for the United States Air Force Academy (USAFA) to operate.
In addition, two NASA experiments are also onboard the space plane to study the effects of the space environment on a materials sample plate and seeds used to grow food.

X-37B handout.
Credit: Boeing
Delta 9
The X-37B program is under the wing of a U.S. Space Force unit called Delta 9, established and activated July 24, 2020.
“Delta 9 Detachment 1 oversees operations of the X-37B Orbital Test Vehicle, an experimental program designed to demonstrate technologies for a reliable, reusable, unmanned space test platform for the U.S. Space Force,” according to a fact sheet issued by Schriever Air Force Base in Colorado. Delta 9 consists of three active duty squadrons headquartered at Schriever.
“The mission of Delta 9 is to prepare, present, and project assigned and attached forces for the purpose of conducting protect and defend operations and providing national decision authorities with response options to deter and, when necessary, defeat orbital threats,” the fact sheet explains. “Additionally, Delta 9 supports Space Domain Awareness by conducting space-based battlespace characterization operations and also conducts on-orbit experimentation and technology demonstrations for the U.S. Space Force.”
Go to this video of the U.S. military space plane pass posted August 6, 2021 as recorded by satellite spotter, Kevin Fetter, at:

Credit: SwRI
NASA’s Lucy mission will launch in October 2021 and start an epic, 12-year journey to study seven different Trojan asteroids.
As the first-ever mission to the Trojan asteroids, NASA’s Lucy spacecraft will survey this enigmatic population of small bodies that orbit the Sun beyond the main asteroid belt – trapped by Jupiter and the Sun so that they have led and followed Jupiter in its orbit.

Diagram illustrates Lucy’s orbital path. After launch in October 2021, Lucy has two close Earth flybys before encountering its Trojan targets.
Credit: SwRI
As these never before explored asteroids are in many ways “fossils” from the formation and evolution of the planets, the Lucy spacecraft is named in honor of the fossilized human ancestor discovered the year after Pioneer 11 began its journey out of the Solar System.
Lucy’s name was inspired by the Beatles’ song “Lucy in the Sky with Diamonds.”

Credit: SwRI
Time-capsule plaque
Similar to four earlier spacecraft – Pioneer 10 and 11, Voyager 1 and 2 – Lucy is carrying a plaque. However, because Lucy will not be venturing outside of our Solar System, Lucy’s plaque is a time-capsule featuring messages to our descendants.

Lucy spacecraft.
Credit: Lockheed Martin
The plaque includes messages from prominent thinkers of our time and a diagram showing the positions of the planets on the date of Lucy’s launch.
Among the communiqués are sayings from musician Brian May, George Harrison, Paul McCartney, Ringo Starr, and John Lennon, the primary author of “Lucy in the Sky with Diamonds.” Also on the plaque is a communication from Yoko Ono.
Lucy was designed, built and will be operated by Lockheed Martin.

Lucy’s principal investigator, Harold “Hal” Levison, from the Southwest Research Institute in Boulder, Colorado.
Credit: NASA
Lucy is a Discovery class mission led by principal investigator Harold “Hal” Levison from the Southwest Research Institute (SwRI) in Boulder, Colorado, who, with a team of scientists and engineers, will address key science questions about the solar system.
For a video detailing the Lucy-carried messages, go to:
Credit: Caltech
Caltech has announced that Donald Bren, chairman of Irvine Company and a lifetime member of the Caltech Board of Trustees, donated over $100 million to form the Space-based Solar Power Project (SSPP), which is developing technology capable of generating solar power in space and beaming it back to Earth.

Credit: Caltech
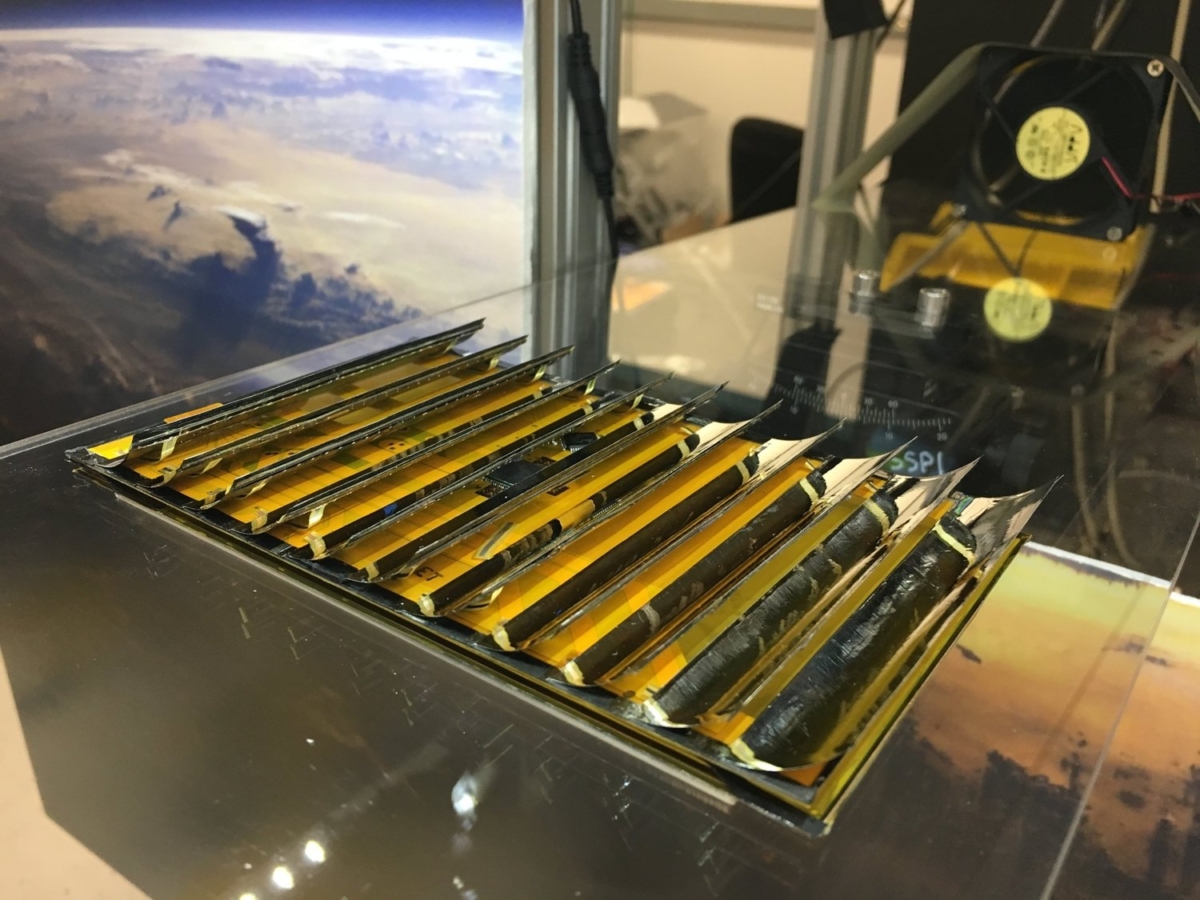
The donation was made anonymously in 2013, but the gift is now being disclosed as SSPP nears a significant milestone: a test launch of multifunctional technology-demonstrator prototypes that collect sunlight and convert it to electrical energy, transfer energy wirelessly in free-space using radio frequency (RF) electrical power, and deploy ultra-light structures that will be used to integrate them.
First test
The project’s first test, which will occur in early 2023, will launch technology prototypes for the solar power generators and RF wireless power transfer, and includes a deployable structure measuring roughly 6 feet by 6 feet.

From left, Sergio Pellegrino, the Joyce and Kent Kresa Professor of Aeronautics and Professor of Civil Engineering, Jet Propulsion Laboratory Senior Research Scientist and co-director of the Space-Based Solar Power Project; Brigitte Bren; Donald Bren; Ali Hajimiri, the Bren Professor of Electrical Engineering and Medical Engineering and co-director of the Space-Based Solar Power Project; and Richard Madonna, project manager of the Space-Based Solar Power Project.
SSPP aims to ultimately produce a global supply of affordable, renewable, clean energy. A key benefit of harnessing solar power from space is that it provides access to the sun to create power all day, every day, free from weather constraints or darkness of night.
Go to this Caltech video Space Solar Power: A New Beginning – Sergio Pellegrino (dated 10/31/2018) at:

Curiosity operators have recently done full Mars Hand Lens Imager (MAHLI) wheel imaging. Image shows wheel, bedrock and some nodules.
MAHLI photo produced on Sol 3195, August 2, 2021.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover at Gale Crater has just begun performing Sol 3198 tasks.
Reports Susanne Schwenzer, a planetary geologist at The Open University; Milton Keynes, in the U.K.: A recently scripted two-sol (3197, 3198) plan focuses on what geologists call nodules, “little rounded things that stick out of the surrounding rock because they are just a little bit more resistant to weathering than the rock itself. The term nodule thereby does not say anything about how they formed; it’s just a description of what you see in the images.”

Curiosity Front Hazard Avoidance Camera Right B photo taken on Sol 3197, August 4, 2021.
Credit: NASA/JPL-Caltech
Curiosity is parked in an area that has lots of those nodules. Consequently, the robot’s Alpha Particle X-Ray Spectrometer (APXS) was set to look at target “Vendoire” in the workspace, and that target has lots of these nodules.
Fingers crossed
The Chemistry and Camera (ChemCam) instrument is also to join the effort, trying to hit some of the nodules also imaged by a Mastcam multispectral observation, “but they are tiny, so, fingers crossed,” Schwenzer adds. “Always remember, we are trying to hit something of the size of a dime or smaller at a distance from about 3 meters or more. Let’s see what target “Beleymas” brings, but we are confident to at least hit some!”

Curiosity Left B Navigation Camera image acquired on Sol 3197, August 4, 2021.
Credit: NASA/JPL-Caltech
ChemCam is also looking into the distance, where scientists have spotted an outcrop where there are changes in the textures – the upper part of the outcrop looks smoother from the rover’s vantage point than the lower part.
“What’s better than getting close by pointing the remote imager at it? That will help us decide what might be behind the patterns in the current images,” Schwenzer notes. “Mastcam is joining the distance-imaging and adding color to the ChemCam images, as well as looking right in front of the rover to support the nodule investigations and a butte in the ‘Sands of Forvie’ area. It is collecting two multispectral observations in support of the nodule observation on targets ‘Baneuil’ and the above named target ‘Beleymas.’”
Clast survey
After all this science there is a rover drive, more imaging, and more science.
“The imaging is mostly to get the data needed for the next planning, but also a little science as we are also getting an image for our regular clast survey,” Schwenzer explains.

Curiosity Left B Navigation Camera image acquired on Sol 3197, August 4, 2021.
Credit: NASA/JPL-Caltech
Clast surveys are high angle monoscopic images acquired periodically of soil deposits in front of the rover.
The robot’s ChemCam will perform an Autonomous Exploration for Gathering Increased Science (AEGIS) observation, where it looks for its own target after the drive.
“Those investigations add important capabilities to our plans as they allow us to use ChemCam [Laser Induced Breakdown Spectroscopy] (LIBS) before we here on Earth have seen the new parking space,” Schwenzer concludes. “It’s an interesting area, especially for me as a mineralogist, as all those nodules usually also mean chemical and mineralogical changes. Well, we’ll soon find out!”

Credit: ESA
Venus is getting a once-over…no wait. Venus is getting a twice-over!
Two separate spacecraft are making dual flybys just 33 hours apart on August 9 and August 10.
The European Space Agency’s (ESA) Solar Orbiter and BepiColombo probes both need a gravitational swingby to reach their ultimate destinations
BepiColombo is on its way to Mercury; Solar Orbiter is en route to view the Sun’s poles.

BepiColombo
Credit: ESA/ATG medialab
Observations
It is not possible to take high-resolution imagery of Venus with the science cameras onboard either mission. However, two of BepiColombo’s three monitoring cameras will be taking photos around the time of close approach and in the days after as the planet fades from view. Furthermore, there may be an opportunity for Solar Orbiter’s SoloHI imager to observe the nightside of Venus in the week before closest approach.

Solar Orbiter
Credit: ESA/ATG medialab
Additionally, both Solar Orbiter and BepiColombo’s Mercury Planetary Orbiter and Mercury Magnetospheric Orbiter will collect data on the magnetic and plasma environment of Venus from different locations.
The data collected during the flybys will also provide useful inputs to ESA’s future Venus orbiter, EnVision, which was selected earlier this year and will launch to Venus in the 2030s.

China’s space station expected to be completed around 2022.
CMS/Inside Outer Space screengrab
At a quickening pace, China is blueprinting and carrying out a striking 21st space agenda, including a succession of robotic interplanetary missions to asteroids, Jupiter, and returning samples from Mars. Layered into the mix is a five year plan for Moon exploration, capped by inking a partnership with Russia to put in place an International Lunar Research Station to be visited by human crews.
In the meantime, nearer to Earth, China is presently constructing the country’s “Heavenly Palace.” A core segment of the multi-modular Tiangong space station is already up and operating, housing a three-person crew. A go-getting schedule of booster launches of more astronauts, supply ships, and add-on modules stretches into late next year to finish China’s orbital outpost. The China Manned Space Agency has reportedly given provisional approval to stuff the station with over a 1,000 experiments and is working with the United Nations to invite foreign participation.

Chinese President Xi Jinping inspects Chang’e-5 lunar sample return capsule.
Credit: CCTV/Inside Outer Space screengrab
All this activity is not going unnoticed by the United States. What impact China’s space schedule, along with the country’s joint ventures with Russia, will have on U.S. space exploration objectives is murky. Some suggest, perhaps, it’s time to search for common ground and shape a multi-nation space agenda. If so, how best to play the China space cooperation card?

China’s touchdown on Mars.
Credit: CNSA/Inside Outer Space screengrab
Take a read of my new Scientific American story on this topic at:
“Can the U.S. and China Cooperate in Space? – China’s meteoric rise in space science and exploration—along with its new partnership with Russia—is spurring U.S. experts to reconsider a long-standing prohibition on bilateral collaborations”
https://www.scientificamerican.com/article/can-the-u-s-and-china-cooperate-in-space/

Curiosity Front Hazard Avoidance Camera Right B image acquired on Sol 3193, July 30, 2021.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 3194 tasks.
“Curiosity is continuing to climb through an area where orbital data show the layers of Mount Sharp are transitioning from clay-bearing to sulfate-bearing,” reports Abigail Fraeman, a planetary geologist at NASA’s Jet Propulsion Laboratory. “I continue to be dazzled by the textures we’re seeing, especially the prevalence of centimeter sized bumps and lumps poking out of the bedrock.”
Fraeman notes that the robot’s Chemistry and Camera (ChemCam) Remote Micro-Imager (RMI) has captured a particularly whimsical image of an interesting rock texture. The whole field of view is about 16.5 cm across, so this is a very tiny feature!

Curiosity Chemistry & Camera (ChemCam) Remote Micro-Imager (RMI) photo taken on Sol 3190, July 27, 2021.
Credit: NASA/JPL-Caltech/LANL
Scenic terrain
A recently scripted plan for sols 3192 and 3193 include contact science, remote sensing, and driving.

Curiosity Right B Navigation Camera image taken on Sol 3193, July 30, 2021.
Credit: NASA/JPL-Caltech
Curiosity was set to observe a nodular bedrock target named “Champeaux” with its Alpha Particle X-Ray Spectrometer (APXS) and Mars Hand Lens Imager (MAHLI) first thing in the morning on sol 3192.

Curiosity Right B Navigation Camera image taken on Sol 3193, July 30, 2021.
Credit: NASA/JPL-Caltech
Then the plan scripts capturing Mastcam and ChemCam RMI mosaics of some of the scenic terrain surrounding Curiosity, a ChemCam Laser Induced Breakdown Spectroscopy (LIBS) observation of “Manaurie,” and additional Mastcam images of surrounding outcrops.

Strategic route
“After wrapping up science at this site, we’ll drive along our strategic route up Mount Sharp and spend the second sol [3193] of the plan collecting observations that monitor the environment,” Fraeman says.

Also on tap is acquiring a ChemCam autonomously selected Autonomous Exploration for Gathering Increased Science (AEGIS) observation.

Complex terrain of rocks, impact craters and sand dunes.
Credit: CNSA
China’s Zhurong Mars rover has been operating on the Martian surface for 75 Martian days and has traveled over 2,322 feet (708 meters) within the Red Planet’s Utopia Planitia.
The robot has begun traversing “complex terrain” the China National Space Administration (CNSA) said on Friday. Rocks, impact craters and sand dunes characterize that exploration site.
The rover has completed a survey of a second sand dune and is wheeling southward. Zhurong arrived in the complex terrain area earlier this week, said the center.

China’s Zhurong Mars rover.
Credit: CCTV/Inside Outer Space screengrab
Terrain images
According to China Central Television (CCTV), ground operators will make visual positioning and movement path planning for the rover based on navigation terrain images they obtain every day, so as to ensure the rover’s safety in the area.
When Zhurong meets a target of interest, scientific payloads onboard the rover — such as the surface composition detector and multispectral camera — will carry out tasks. During the journey, the rover’s subsurface radar, meteorological measurement instrument, and subsurface detection radar will also be turned on for detection.

Credit: CCTV/Inside Outer Space screengrab
Data processing
China’s Tianwen-1 spacecraft, consisting of the orbiter and the rover as well as a lander, was launched on July 23, 2020. The lander carrying the rover touched down in the southern part of Utopia Planitia, a vast plain in the northern hemisphere of Mars, on May 15.
Zhurong drove down from its landing platform to the Martian surface on May 22, making China the second country after the United States to land and successfully operate a rover on Mars.
A newly issued CCTV video details the transmission and processing of data from Mars via China’s Tianwen-1 Mars probe mission.
Go to: https://youtu.be/FYhKBm0DjFQ

The United States government and commercial spaceflight providers have no plans in place to conduct a timely rescue of a crew from a distressed spacecraft in low Earth orbit, or anywhere else in space.
Without rescue plans in place, today’s space travelers will journey at their own risk.
The present posture, of not planning for in-space rescue and not having responsive in-space rescue capabilities, needs to be addressed before the need for a rescue materializes. The U. S. has the wherewithal to establish space rescue capabilities and to do so with a sense of urgency.
A new report — The In-space Rescue Capability Gap — seeks to raise awareness of the need to revisit space rescue policies and put in place measures to address this issue.
Author of the report, Grant Cates, is a senior project leader for The Aerospace Corporation’s Space Architecture Department.

USS Squalus and Diving Bell by John Groth/
Naval History and Heritage Command
Historical analogs
Issued by the corporation’s Center for Space Policy and Strategy and the organization’s Space Safety Institute, Cates uses historical analogs, such as the ancient maritime explorers that embarked upon epic journeys with multiple ships, effective submarine rescue operations, and the rich history of human spaceflight.
Potential solutions to improve safety during space travel are identified and policy options are discussed in the paper.
The paper offers a series of conclusions:
- The United States has no present capability or policy for conducting in-space rescues. This despite:
- Having studied space escape and rescue systems since 1959.
- Having demonstrated a self-rescue capability during the aborted Apollo 13 mission.
- Having put in place rescue capabilities for the Skylab mission.
- Experiencing the hard-learned revelation of the importance of in-space rescue options after the loss of space shuttle Columbia and her 7-person crew.
Columbia catastrophe
On February 1, 2003, Columbia broke up as it reentered Earth’s atmosphere, killing all onboard, with NASA suspending shuttle mission for more than two years as it looked into causes of the catastrophe.

Credit: NASA
Indeed, the report of the Columbia Accident Investigation Board concluded that if NASA had recognized the damage at the beginning of the mission, then a rescue by using the next space shuttle due for launch, Atlantis, would have been feasible.
That rescue would have entailed maneuvering Atlantis next to Columbia and then transferring the crewmembers via individual spacewalks. “This rescue was considered challenging but feasible,” as noted in the Columbia Accident Investigation board report volume 1.
First step
“A space rescue capability is likely to be highly synergistic with the long-sought-after capability of having responsive launch capability,” Cates writes. “Perhaps a good first step to achieve both would be for the U.S. Congress to establish a policy such as: “It should be the policy of the United States to develop and put in place rapid launch-on-need capability to support: timely rescue of astronauts in cis-lunar space; rapid reconstitution of nationally important space assets; and the ability to put in place new space capabilities in response to emerging threats in near real time.”

Credit: dearMoon
Imagine the public outcry, Cates adds, that could arise if an Inspiration4, Axiom, dearMoon or a similar mission were stranded in low Earth orbit or cislunar space by a disabled spacecraft.
Inspiration4 is the world’s first all-civilian mission to orbit. The mission will be commanded by Jared Isaacman, the 38-year-old founder and Chief Executive Officer of Shift4 Payments and an accomplished pilot and adventurer.
Axiom’s four-person Ax-1 crew is to fly to the International Space Station.
The dearMoon project is a lunar tourism mission and art project conceived and financed by Japanese billionaire Yusaku Maezawa.
To read the full report — The In-space Rescue Capability Gap – go to:
https://aerospace.org/sites/default/files/2021-07/Cates_SpaceRescue_20210728.pdf

After lifting off from the lunar surface, the Apollo 11 ascent stage docked with the Columbia command module, with Neil Armstrong and Buzz Aldrin rejoining Mike Collins. The ascent stage was then jettisoned in lunar orbit.
Credit: NASA
New research points to the prospect that the historic Apollo 11 “Eagle” Lunar Module ascent stage may still be orbiting the Moon.
James Meador has published his numerical analysis and simulations in the Planetary and Space Science journal, work that “provides evidence that this object might have remained in lunar orbit to the present day.”
Meador notes that the lunar modules were designed for 10-day missions, and little consideration was given to long-term reliability. “For this reason, fuel leaks might have resulted in propulsive events or even complete destruction at any time after the craft was jettisoned. Although catastrophic outcomes are possible, there exists some possibility that this machine might have reached an inert state, allowing it to remain in orbit to the present day. If so, it should be detectable by radar,” he writes.
Wanted: radar scans
A rough analysis indicates that the historic Eagle ascent stage that boosted Neil Armstrong and Buzz Aldrin off the Moon would be more than 78 miles (125 kilometers) above the lunar surface in about 25% of limb crossings.
“If one assumes radar is able to detect objects at this altitude, then four judiciously chosen 2-hour observation periods should provide sufficient coverage to possibly relocate one of the most important artifacts in the history of space exploration,” Meador writes.
To access the complete paper – “Long-term orbit stability of the Apollo 11 “Eagle” Lunar Module Ascent Stage” – go to:
https://www.sciencedirect.com/science/article/abs/pii/S0032063321001434
Note: Special thanks to skywatcher John Williams for calling my attention to this interesting research.

