Author Archive

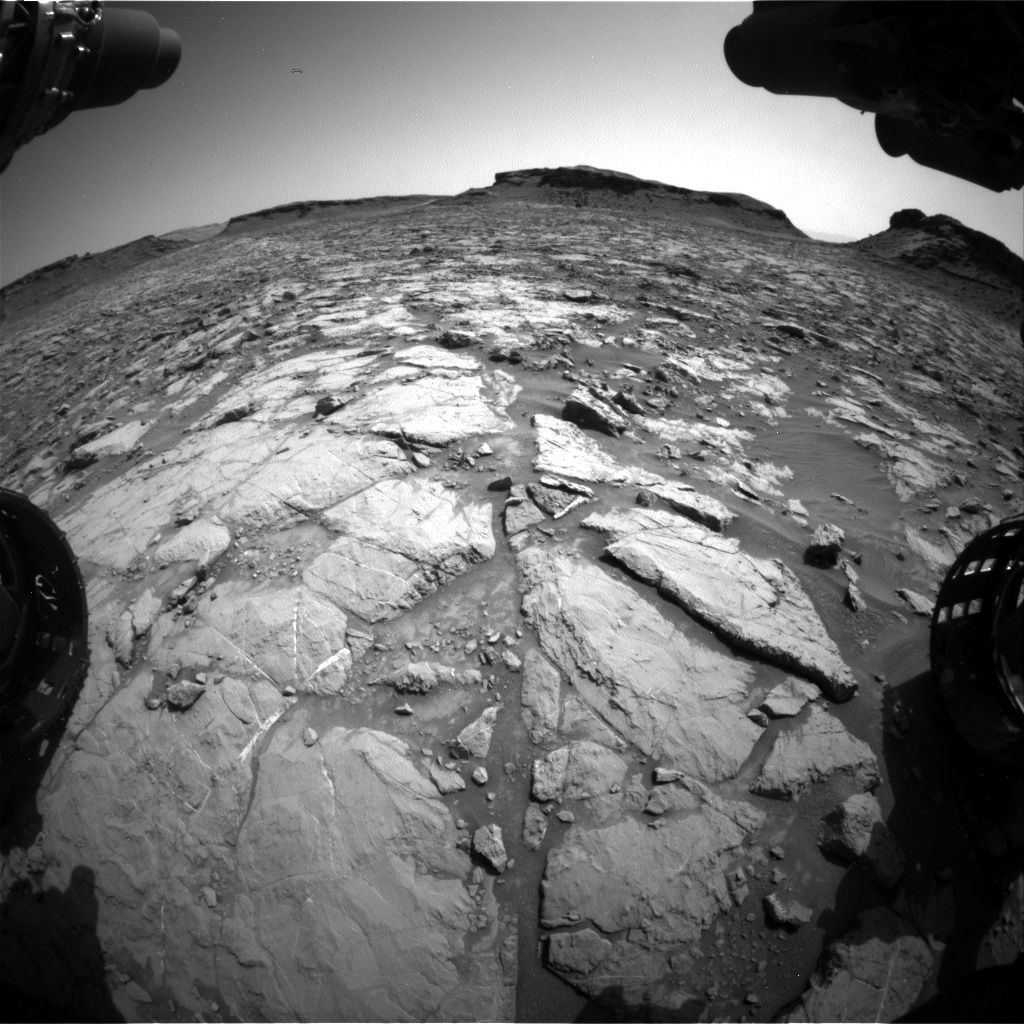
Curiosity Navcam Left B image taken on Sol 1439, August 23, 2016.
Credit: NASA/JPL-Caltech
The word from Curiosity Mars rover scientists is that the robot is making good progress through the Murray Buttes
Now in Sol 1441, the rover drove some 112 feet (34 meters) to the south on Sol 1439.
According to Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona, Curiosity planning for sols ahead include a routine pre-drive science block, drive, post-drive imaging for targeting, and an untargeted science block.

Curiosity Mastcam Left image taken on Sol 1439, August 23, 2016.
Credit: NASA/JPL-Caltech/MSSS
The forward plan starts with Mastcam and Chemistry and Camera (ChemCam) observations of the targets “Viana,” “Ukuma,” and “Waku Kungo” to assess the composition and sedimentary structures in the local bedrock.
A large Mastcam mosaic is slated to document some of the buttes.
After an upcoming drive, Curiosity is to take post-drive imaging for targeting and context, as well as an autonomously selected ChemCam target using special software.
A second sol calls for atmospheric monitoring, including a ChemCam passive sky activity, and Navcam observations to search for dust devils and clouds.
“If we keep up this driving pace,” Edgar adds, “we could be looking for our next drill target as early as next Wednesday!”

On February 19, 2016 Rosetta’s instruments detected an outburst event from Comet 67P/Churyumov–Gerasimenko. The source was traced back to a location in the Atum region, on the comet’s large lobe, as indicated in this image.
Credit: ESA/Rosetta/NavCam – CC BY-SA IGO 3.0
The European Space Agency’s Rosetta comet orbiter has caught on camera an outburst from the celestial wanderer.
According to an ESA press statement today, Rosetta unexpectedly captured a dramatic comet outburst that may have been triggered by a landslide.
Nine of Rosetta’s instruments, including its cameras, dust collectors, and gas and plasma analyzers, were monitoring the comet from about 35 km in a coordinated planned sequence when the outburst happened on February 19th.
Outburst signatures
Rosetta’s OSIRIS wide-angle camera captured the outburst from the Atum region on Comet 67P/Churyumov–Gerasimenko’s large lobe.
Over a two hour period, Rosetta recorded outburst signatures that exceeded background levels in some instruments by factors of up to a hundred.
Astronomers on Earth also noted an increase in coma density in the days after the outburst.
Landslide
“The fact that the outburst started when this area just emerged from shadow suggests that thermal stresses in the surface material may have triggered a landslide that exposed fresh water ice to direct solar illumination,” explains ESA. “The ice then immediately turned to gas, dragging surrounding dust with it to produce the debris cloud seen by OSIRIS,” the press statement adds.

Rosetta orbiter.
Credit: ESA
What’s ahead?
Rosetta was launched in 2004, catching up with the comet 67P/Churyumov-Gerasimenko ten years later.
On November 12, 2014, the orbiter released the Philae probe that repeatedly bounced across the comet then came to a full-stop to relay science data.

This series of 19 images, acquired by the Rosetta orbiter’s Optical, Spectroscopic, and Infrared Remote Imaging System (OSIRIS) on 12 November 2014, shows the Philae lander during its descent towards Comet 67P/Churyumov-Gerasimenko.
Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA.
The Rosetta orbiter is set to complete its mission in a controlled descent to the surface of its comet on September 30th.
Next month’s descent will enable Rosetta to make up-close measurements, including very-high-resolution imaging.
Communications will cease, however, once the orbiter reaches the surface, and its operations will then end.
The target region for Rosetta’s impact is still under discussion. It is expected that Rosetta’s impact will take place at about 1 mile per hour (50 centimeters per second).
For a ring side seat to the outburst, go to:
http://www.esa.int/spaceinimages/Images/2016/08/Comet_outburst

Artist rendering of the Directed Energy Interstellar Study.
Credits: P. Lubin
For you interstellar travelers out there – it’s a doable target!
Proxima b is the closest possible home for life outside the solar system – a mere jump away at four-light-years.
An international team of scientists led by astronomers at Queen Mary University of London (QMUL) announced today clear evidence of a planet orbiting Proxima Centauri, the closest star to our solar system.

Credit: ESO
Rocky world
Using facilities operated by ESO (the European Southern Observatory) and other telescopes, the research indicates that Proxima b orbits its parent star every 11 days. It appears that the rocky world – slightly more massive than the Earth — sports a temperature suitable for liquid water to exist on its surface.
In a QMUL press statement, the lead author and coordinator of the project, Guillem Anglada-Escudé from QMUL’s School of Physics and Astronomy, said:
“Succeeding in the search for the nearest terrestrial planet beyond the solar system has been an experience of a lifetime, and has drawn on the dedication and passion of a number of international researchers. We hope these findings inspire future generations to keep looking beyond the stars. The search for life on Proxima b comes next.”

Artist’s impression of the planet orbiting Proxima Centauri.
Credit: ESO
Cautionary caveats
While the temperate orbit of Proxima b is a plus, the conditions on the surface may be strongly affected by the ultraviolet and X-ray flares from the star Proxima Centauri — a red dwarf star — these would be far more intense than those the Earth experiences from the Sun.
Furthermore, the actual suitability of this kind of planet to support water and Earth-like life is a matter of intense but mostly theoretical debate.
The QMUL press statement notes: “Major concerns that count against the presence of life are related to the closeness of the star. For example gravitational forces probably maintain the same side of the planet in perpetual daylight, while the other side is in perpetual night. The planet’s atmosphere might also slowly be evaporating or have more complex chemistry than Earth’s due to stronger ultraviolet and X-ray radiation, especially during the first billion years of the star’s life.”
Further observations
However, none of the arguments has been proven conclusively, the QMUL statement continues, “and they are unlikely to be settled without direct observational evidence and characterization of the planet’s atmosphere.
This discovery will kick-start a campaign of further observations, both with current instruments and with next generation of giant telescopes, such as ESO’s European Extremely Large Telescope, as well as space-based telescopes.
“Proxima b will be a prime target for the hunt for evidence of life elsewhere in the universe,” noted the QMUL press statement.

Pete Worden of Breakthrough Initiatives.
Credit: ESO/M. Zamani
Robotic exploration
In their research paper published in Nature – “A terrestrial planet candidate in a temperate orbit around Proxima Centauri” – the authors conclude:
“In this sense, a warm terrestrial planet around Proxima offers unique follow-up opportunities to attempt further characterization via transits -on going searches-, via direct imaging and high-resolution spectroscopy in the next decades, and –maybe– robotic exploration in the coming centuries.”
Can we reach the stars? If we can, the natural first step is our nearest star system, Alpha Centauri – four light years away.

Credit: Breakthrough Initiatives
Breakthrough Starshot
Enter Breakthrough Starshot – a $100 million research and engineering program aiming to demonstrate proof of concept for a new technology, enabling ultra-light unmanned space flight at 20% of the speed of light; and to lay the foundations for a flyby mission to Alpha Centauri within a generation.
Breakthrough Initiatives plans to develop a proof-of-concept fleet of light sail spacecraft, namedStarChip, capable of making the journey to the Alpha Centauri star system, 4.37 light-years away.
The Breakthrough Initiatives were founded in 2015 by Yuri and Julia Milner to explore the Universe, seek scientific evidence of life beyond Earth, and encourage public debate from a planetary perspective.
For more information, go to:
http://breakthroughinitiatives.org/

Credit: PHL
Catalog add
Proxima b was added to the Habitable Exoplanets Catalog (HEC) “as one of the best objects of interest for the search for life in the universe.”
The Planetary Habitability Laboratory (PHL) is a research and education virtual laboratory dedicated to studies of the habitability of Earth, the Solar System, and exoplanets. The PHL is managed by the University of Puerto Rico at Arecibo.
Go to: http://phl.upr.edu/
Resources:
The new research paper published in Nature can be read here:
http://www.eso.org/public/archives/releases/sciencepapers/eso1629/eso1629a.pdf
NOTE:
- To get up to speed on the Directed Energy Interstellar Study by Philip Lubin at the University of California, Santa Barbara, go to:
http://www.nasa.gov/sites/default/files/atoms/files/roadmap_to_interstellar_flight_tagged.pdf
- A video discussing Lubin’s work and his NASA Innovative Advanced Concept (NIAC) research concerning energy propulsion for interstellar exploration is available here:
https://www.youtube.com/watch?v=WCDuAiA6kX0
- Lastly, Lubin is scheduled to discuss today his current work at the 2016 NIAC Symposium now underway in Raleigh, North Carolina. To tap into the NIAC live stream presentations, go to:

The discovery of Enceladus’ icy jets and their role in creating Saturn’s E-ring is one of the leading discoveries of the Cassini mission to Saturn – now approaching two decades of lifetime. There is strong evidence of a global ocean and the first signs of potential hydrothermal activity beyond Earth – making this tiny Saturnian moon one of the leading locations in the search for possible life beyond Earth.
Credit: NASA/JPL-Caltech
Thanks to a suite of scientific instruments and fly-by opportunities, NASA’s Cassini mission to Saturn has transformed our understanding of that far-off planet and its retinue of icy moons.
Active jets
For one, Saturn’s Enceladus is a mini-world of active jets – geyser-like phenomenon that shoots out water vapor and ice particles from an underground ocean beneath the moon’s icy crust.
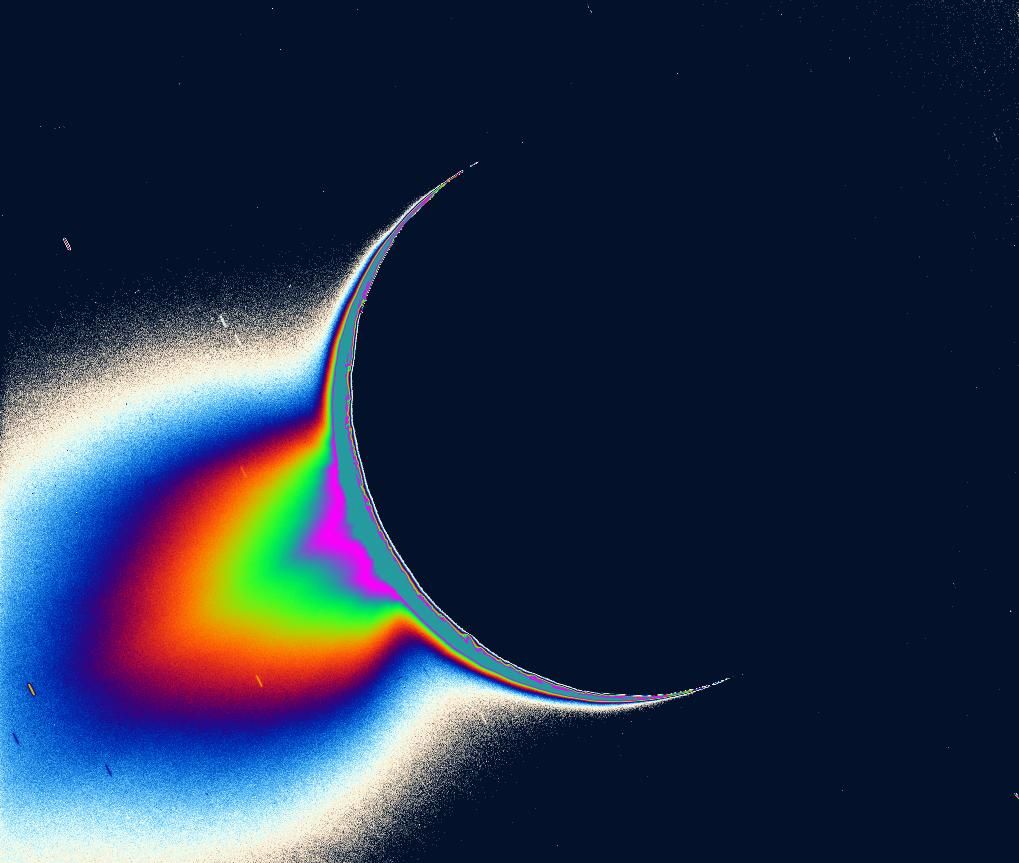
Snagged by Cassini spacecraft, Saturn’s moon Enceladus is imaged backlit by the sun and shows the fountain-like sources of the fine spray of material that towers over its south polar region.
Credit: NASA/JPL-Caltech/Space Science Institute
Due to those planetary skyworks, coupled with a global ocean, distinctive chemistry and internal heat, it’s no wonder Enceladus has become a magnet of interest in the search for worlds where life may well exist.
Logo of Germany’s Enceladus Explorer (EnEx) – Environmental Experimental Testing — project team at the University of Applied Sciences in Aachen, Germany. The initiative is studying technology for a potential lander mission on Enceladus, funded and managed by Germany’s DLR Space Administration and comprises several German universities.
Deep dive
For a deep dive story on Enceladus, go to my new Space.com story at:
Looking for Life on Saturn’s Moon Enceladus: Send a Flyby or Lander?
August 24, 2016 06:00 am ET
http://www.space.com/33835-saturn-moon-enceladus-alien-life-search.html
Also, take a look at this impressive video via Vimeo, credit WOW Inc.
Go to:

A press event was held in Beijing, China that signaled the launching of a public competitive campaign to get a name and logo for the country’s first robotic Mars probe – due to launch in 2020.
During the press event, the external appearance of the Mars craft was revealed.
According to Zhang Rongqiao, chief designer of China’s Mars exploration mission:
“What we’re aiming at now is to launch the voyager in July or August of 2020,” Zhang said. “Our overall concept for this mission is to do it in two stages. Stage One is to materialize orbiting Mars. Stage Two is to land on Mars to collect samples from it, hopefully done before 2030.”

China’s robotic Mars mission for 2020 will drawn upon its Moon landing technology.
Credit: SASTIND
Cultural domain
Liu Jizhong, deputy director-general of China’s Mars exploration mission, director of China’s lunar exploration program and space engineering, added:
“All the Chinese are looking up to the country’s first Mars exploration mission which is an innovative engineering project. China’s Mars exploration mission has also drawn attention from the international community. This competitive public campaign to name and logo the voyager can be seen as side-step in the cultural domain.”

Credit: CCTV/China Spaceflight.com
The public campaign announced August 23 will solicit from the country’s citizens a name and a logo for the Mars craft and is being hosted by China’s State Administration of Science, Technology and Industry for National Defense.
Competitive entries will be accepted for two months prior to final selection of the Mars vehicle’s name and mission logo.
To view the press event, go to this CCTV-Plus video:
http://cd-pv.news.cctvplus.com/2016/0823/8030398_Preview_3261.mp4
A YouTube video on the Chinese Mars effort can be found here at:

Curiosity Mastcam Right image taken on Sol 1437, August 21, 2016.
Credit: NASA/JPL-Caltech/MSSS
The Curiosity rover on Mars carried out a drive over the weekend, but halted a bit early, “but everything is looking good and we will continue to drive in today’s plan,” reported Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona on Monday.
Now in Sol 1439, the plan for the rover starts off with Chemistry & Camera (ChemCam) observations of the layered rock targets “Quibala” and “Quibaxe.”
The rover’s Mastcam is set to then image Quibala, followed by taking mosaics that document the stratigraphy in the nearby buttes as well as the locations called “Quibaxe”, “Quipungo” and “Quicombo.”

Curiosity Mastcam Right image taken on Sol 1433, August 17, 2016.
Credit: NASA/JPL-Caltech/MSSS
More driving, auto-observations
Anderson adds that after these functions, the schedule calls for the rover to drive, with follow up post-drive imaging as well as use of ChemCam AEGIS software, that is, an Autonomous Exploration for Gathering Increased Science (AEGIS) observation. This software allows Curiosity to autonomously select targets for the laser and telescopic camera of its ChemCam instrument.

Curiosity Navcam Left B image taken on Sol 1438, August 22, 2016.
Credit: NASA/JPL-Caltech
The following morning, Anderson adds, the robot’s Mastcam and Navcam have on tap atmospheric observations, and then in the afternoon ChemCam will analyze its calibration targets.

Mars Hand Lens Imager (MAHLI) image taken on August 22, 2016, Sol 1438.
Credit: NASA/JPL-Caltech/MSSS
Rover’s location
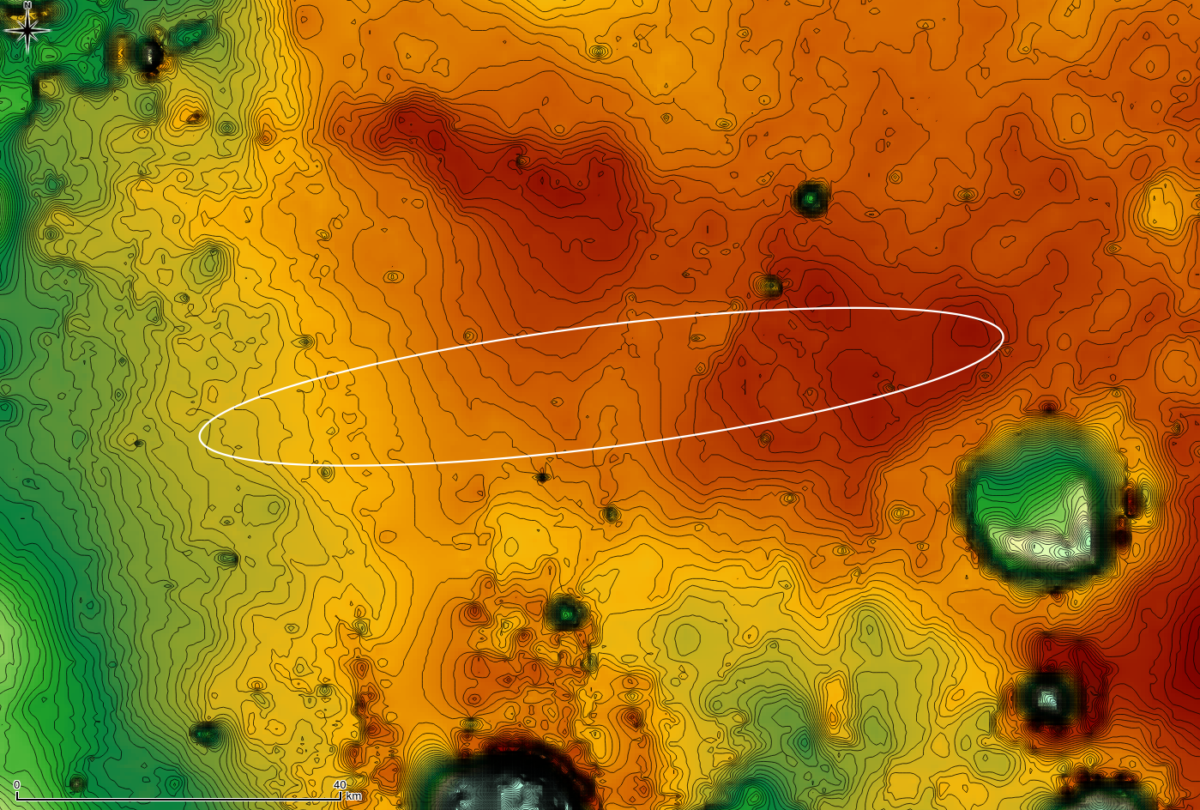
Meanwhile, a new map has been posted by the Jet Propulsion Laboratory showing the rover’s location for Sol 1435.
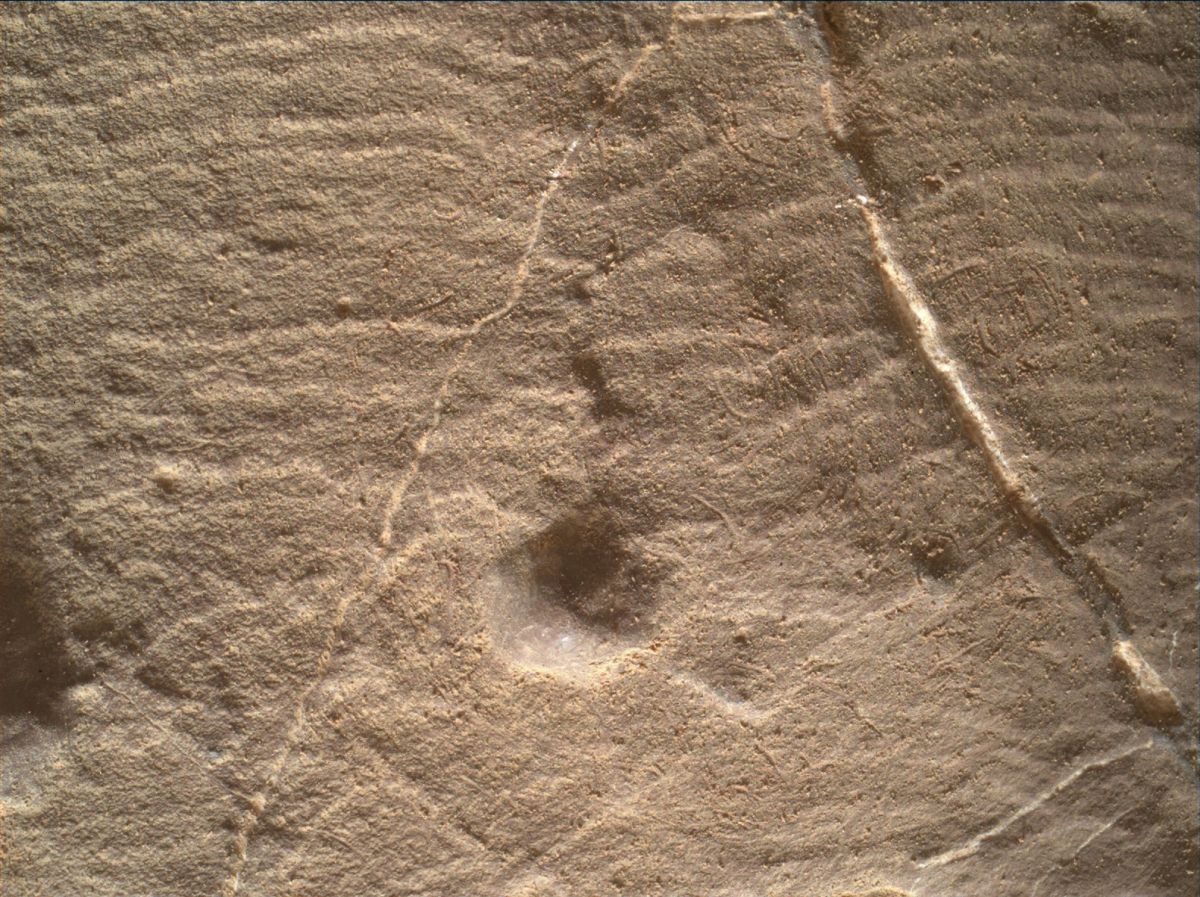
Mars Hand Lens Imager (MAHLI) image taken on August 22, 2016, Sol 1438.
Credit: NASA/JPL-Caltech/MSSS
The map shows the route driven by Curiosity through the 1435 Martian day, or sol, of the Mars machinery as of August, 19, 2016.
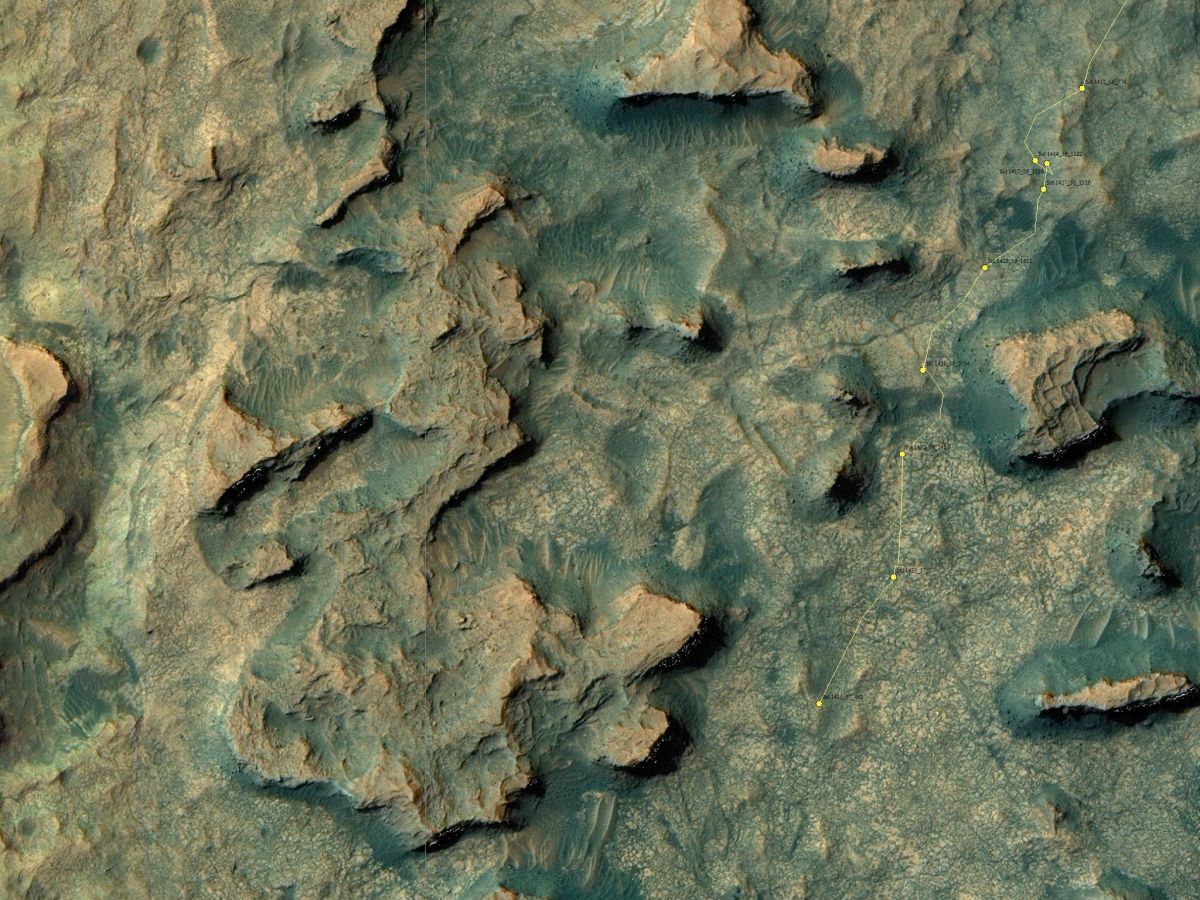
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Numbering of the dots along the line indicate the sol number of each drive. North is up.
From Sol 1433 to Sol 1435, Curiosity had driven a straight line distance of about 205.80 feet (62.73 meters).
Since touching down in August 2012, Curiosity has driven 8.61 miles (13.85 kilometers).

Curiosity Mastcam Right image taken on Sol 1434, August 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
Now deep into Sol 1437 in its exploration of Mars, the Curiosity rover has succeeded in recent drives to various spots on the Red Planet.
“We are making good progress with our drives…we’re already approaching our next drill site…and the road in front of us is looking pretty smooth,” notes Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Layered rock targets
Yesterday, on Sol 1436, the plan for the NASA robot was to start off with Chemistry & Camera (ChemCam) and Mastcam observations of the layered rock targets “Conda” and “Savungo.”
Mastcam then was slated to take a mosaic of one of the buttes, and another mosaic of an interesting feature within the Murray formation called “Chitado.”

Curiosity Navcam Left B image taken on Sol 1436, August 20, 2016.
Credit: NASA/JPL-Caltech
Later in the day, the Mars Hand Lens Imager (MAHLI) will take a look at the targets “Biula” and “Conda”. Then Curiosity will brush the dust off of Conda and do an overnight Alpha Particle X-Ray Spectrometer (APXS) measurement. Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) was also slated to do another analysis of Marimba2 overnight.
Curiosity ChemCam Remote Micro-Imager (RMI) photo taken on Sol 1436, August 20, 2016.
Image Credit: NASA/JPL-Caltech/LANL
On Sol 1437, ChemCam has on the schedule a passive observation of Conda and a Remote Micro-Imager (RMI) mosaic of the target “Chicala.”
Mastcam is then scheduled to take a picture of Chicala and do an atmospheric measurement.
Big mosaic, long drive
Anderson says that in the morning on Sol 1438, the robot’s Mastcam has a big 16×3 mosaic of the Murray Buttes, and Navcam is set to make an atmospheric observation.
Then the rover is on tap to take a long drive – perhaps up to 295 feet (90 meters) — followed by the usual post-drive imaging, Anderson says.
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Curiosity Mastcam Left image taken on Sol 1435, August 19, 2016.
Credit: NASA/JPL-Caltech/MSSS

This 360-degree vista was acquired on Aug. 5, 2016, by the Mastcam on NASA’s Curiosity Mars rover as the rover neared features called “Murray Buttes” on lower Mount Sharp. The dark, flat-topped mesa seen to the left of the rover’s arm is about 50 feet high and, near the top, about 200 feet wide.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now in Sol 1436 – returning detailed imagery of eroded mesas and buttes, even churning out a new 360-degree color panorama of the scenery.

Curiosity Navcam Right B image taken on Sol 1435, August 19, 2016.
Credit: NASA/JPL-Caltech
As noted in a Jet Propulsion Laboratory release: “The buttes and mesas are capped with rock that is relatively resistant to wind erosion. This helps preserve these monumental remnants of a layer that formerly more fully covered the underlying layer that the rover is now driving on.”
For taking your own panoramic look at the Martian surroundings in which Curiosity has encountered, go to:
http://www.jpl.nasa.gov/news/news.php?release=2016-213
Curiosity Front Hazcam Right B image taken on Sol 1435, August 19, 2016.
Credit: NASA/JPL-Caltech
Curiosity made use of its Mast Camera (Mastcam) to capture dozens of component images of this scene on Aug. 5, 2016, four years after Curiosity’s landing inside Gale Crater in 2012.
New just-in imagery shows a self-inspection of the robot’s wheels.
Engineers have been monitoring wear and tear of the robot’s wheels due to the rocky conditions upon which the rover travels.

Curiosity’s Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, took this image on August 19, 2016, Sol 1435.
Credit: NASA/JPL-Caltech/MSSS

Curiosity’s Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, took this image on August 19, 2016, Sol 1435.
Credit: NASA/JPL-Caltech/MSSS

SpaceX Dragon makes use of Supersonic Retro-Propulsion (SRP) to land on Mars.
Credit: SpaceX
SpaceX founder, CEO, and Lead Designer Elon Musk is unveiling his humans to Mars plan at next month’s 67th International Astronautical Congress (IAC), to be held in Guadalajara, Mexico.
The world space meeting runs from September 26-30.
Multiplanetary species
On the second day of the IAC, during a special keynote entitled “Making Humans a Multiplanetary Species,” Musk will discuss the long-term technical challenges that need to be solved to support the creation of a permanent, self-sustaining human presence on Mars.

SpaceX Dragon on Mars.
Credit: SpaceX
The technical presentation will focus on potential architectures for colonizing the Red Planet that industry, government and the scientific community can collaborate on in the years ahead.
Red Dragon
In the past, Musk has detailed his intention to use a Red Dragon spacecraft to fly in un-crewed mode to Mars in the 2018 time period. Later flights of the craft would transport humans to the planet.
Using Supersonic Retro Propulsion to touch down on the Red Planet, the Red Dragon may well deploy scientific devices, particularly hardware that could demonstrate made-on-Mars propellant.
Conversation has changed
Gwynne Shotwell, President of SpaceX, underscored her firm’s Mars plans, speaking August 9 at the 30th annual Conference on Small Satellites, held at Utah State University in Logan, Utah.
“If you talked about this15 years ago we probably would have been institutionalized,” Shotwell told a standing room only audience. “The conversation has changed…now we can talk about going to Mars,” she said.
Shotwell said retro-propulsion is “really the answer” contrasted to airfoils, parachutes and ballutes. “In addition, retro-propulsion will scale. We’re not talking about dropping 10 tons on Mars. We’ll be dropping hundreds of tons on Mars…dropping, I mean, settling down gently.”

Retro-propulsion trial by fire. SpaceX first stage landing taken by remote camera photo from “Of Course I Still Love You” droneship on April 8, 2016.
Credit: SpaceX
Raptor engine
A key SpaceX propulsion development for Mars is the Raptor, a liquid oxygen/methane engine, Shotwell noted, pointing out that the first Raptor engine will soon be test fired.
In terms of what a 2018 un-crewed Red Dragon might take to Mars, “we haven’t figured out how do you get stuff in Dragon onto the surface, but we’re working on it,” Shotwell said.
“We’re working on some ISRU [in-situ resource utilization] payloads,” Shotwell added. “I need my spaceship back to take more people to Mars. The return trip is free.”

Scene from “Mars,” a National Geographic Channel miniseries due to air in November.
Credit: National Geographic, Imagine,RadicalMedia,Robert Viglasky
Clothing opportunities
In terms of degree of difficulty for SpaceX Mars planning, Shotwell said that the hardest thing is getting return fuel from Martian resources. “Mining your own fuel on the surface to lift off again…because the return trip I think is really important,” she said.
Shotwell said that SpaceX is looking at some electric propulsion technologies for in-space activities.
“There’s a lot to do,” Shotwell observed. “I want to see transportation to other solar systems…get into a spaceship and go to some crazy planet. All those new clothing opportunities,” she suggested.
Resources
To view a July 29th trailer for National Geographic Channel’s global event series MARS, premiering in November, go to:
https://www.youtube.com/watch?v=cwUB0GYjHN0
Among those interviewed is Elon Musk, chief rocketeer at SpaceX:
“The future of humanity is fundamentally going to bifurcate along one of two directions: either we’re going to become a multi-planet species and a spacefaring civilization, or we’re going to be stuck on one planet until some eventual extinction event. In order for me to be excited and inspired about the future, it’s got to be the first option,” Musk says in the series.
Before MARS premiers, there will be an extensive digital virtual-reality experience available at:
For more information on the book – Mars: Our Future on the Red Planet — to be released October 25th, go to:
https://shop.nationalgeographic.com/product/books/books/new-books/mars
Also go to Amazon at:
http://www.amazon.com/Mars-Our-Future-Red-Planet/dp/1426217587/ref=sr_1_1?ie
For a pre-look at Musk’s masterplan for Mars, go to this video via:
http://www.recode.net/2016/6/6/11840936/elon-musk-tesla-spacex-mars-full-video-code

Opportunity image taken by rover’s Front Hazcam on Sol 4461.
Credit: NASA/JPL-Caltech
Following over a year of exploration at Marathon Valley on the rim of Endeavour crater, scientists and engineers operating the long-lived Opportunity Mars rover are wrapping up their final work at that site.
“We are finishing up in Marathon Valley…investigating some interesting grooves with red zone fractures,” notes Ray Arvidson, Mars Exploration Rover deputy principal investigator at Washington University St. Louis.
The rover’s activities there should be done by the end of the week with the robot then heading south to Lewis and Clark Gap to leave Marathon Valley.
Gully channel
There is an on-going search for more of the Matijevic formation – a group of rocks at a site called Cape York that suggest mild conditions on Mars long ago, Arvidson adds. “The formation predates Endeavour crater and underlies the crater’s Shoemaker formation impact breccias.”

Opportunity’s Navigation Camera image taken on Sol 4467.
Credit: NASA/JPL-Caltech
Opportunity is to then drive to Cape Byron, “the next rim segment south and a gully that looks like it formed by fluvial processes,” Arvidson explains. “We expect to drive right down the gully channel to check out evidence for ancient fluid flow.
Spectacular spot
The solar powered Opportunity arrived at Marathon Valley in August 2015, wheeling itself across the planet since landing at Meridiana Planum over 12 years ago in January 2004. Not bad for Mars machinery given a 90-day warranty.
“Basically, we’re still finishing up work before we say goodbye to this spectacular spot,” Arvidson told Inside Outer Space.
Schiaparelli entry
Arvidson said that Opportunity will try to image the European Space Agency’s ExoMars 2016 Schiaparelli entry craft. “It depends on where we are relative to a site view to the entry zone.”

ESA’s Schiaparelli landing at Meridiani Planum on Mars on October 19, 2016.
Credit: ESA/ATG medialab
Now en route to the Red Planet, the ExoMars 2016 — the orbiter and Schiaparelli landing vehicle — were launched together on March 14, 2016 on a Russian Proton rocket.
Three days before reaching the atmosphere of Mars, Schiaparelli will be ejected from the orbiter towards the Red Planet.
October sky show
Schiaparelli will coast towards its destination, enter the Martian atmosphere, decelerate using aerobraking and a parachute, and then brake with the aid of a thruster system before landing on the surface of the planet.
The entire entry, descent and landing sequence will be complete in less than six minutes.
Schiaparelli is set to touch down on Meridiani Planum, a relatively smooth, flat region on October 19, 2016 – with the possibility that the Opportunity rover will have a ring-side seat to the sky show.
Projected landing zone for ESA’s Schiaparelli lander.
Credit: IRSPS/TAS-I
Road cut
“The past week we have been investigating some super interesting grooves carved into the valley floor,” explains James Rice, a Mars Exploration Rover Project Science Team Member at the Planetary Science Institute in Tucson, Arizona.
Rice said the robot is slated to drive southward, carrying out imaging and collect science data on bedrock targets.
“The highlight of our final days in Marathon Valley will be imaging stops of Wharton Ridge followed by the Lewis and Clark Gap,” Rice told Inside Outer Space. The Lewis and Clark Gap is located between two very different looking ridges – Knudsen and Wharton, he said.
“The Lewis and Clark Gap may permit us to get a ‘road cut’ view of these two ridge systems and if traversable it will be our exit route from Marathon Valley to points south for our extended mission,” Rice explained.
Name calling
Opportunity’s lengthy survey of the area has led to a special celebratory salute to earlier Mars landers from four decades ago: The U.S. Viking 1 and 2 spacecraft.

Big Joe I at Viking landing site.
Credit: NASA/JPL
“We have been using Viking rock names with the Roman numeral II in order to differentiate these rock targets from the Viking ones,” Rice said.
So far rock targets have been dubbed Big Joe II, Sponge II, Bashful II, Sleepy II, Rocky Flats II, Badger II, Notch II, Gibraltar II, Rice said.

