Author Archive

Artist impression of the Schiaparelli module on the surface of Mars.
Credit: ESA
The European Space Agency’s (ESA) Schiaparelli Mars lander is being readied for its plunge onto the Red Planet.
Controllers at ESA’s mission control in Darmstadt, Germany have uploaded commands that will govern the lander’s descent and touchdown on Mars.
Meanwhile, discussions are underway regarding the best seat in the house for viewing Schiaparelli’s landing – by NASA’s Opportunity Mars rover.

This week’s uploading of commands was conducted by the Orbiter team working at ESA’s mission control in Darmstadt, Germany. The event marked a significant milestone in readiness for arrival of Europe’s ExoMars 2016.
Credit: ESA
Two-parter
ESA’s ExoMars 2016 mission is a two-parter: The Trace Gas Orbiter has been carrying Schiaparelli since launch on March 14 of this year.
Upon arrival at Mars on October 19 — and its parent craft brakes into an elliptical orbit around Mars — Schiaparelli will test the technology needed for Europe’s ExoMars 2020 rover to land.
Taking the fall
One of the most crucial moments will be Schiaparelli’s landing, set for 14:48:11 GMT (16:48:11 CEST) on October 19.
During landing, the recently sent upload of commands include ejecting the front and back aeroshells, operating the descent sensors, deploying the braking parachute and activating three groups of hydrazine thrusters to control the lander’s touchdown speed.

ESA’s Schiaparelli landing at Meridiani Planum on Mars on October 19, 2016.
Credit: ESA/ATG medialab
Radar love
Radar will measure Schiaparelli’s height above the surface starting at about 4 miles (7 kilometers) altitude.
Above Mars, Schiaparelli will briefly hover before cutting its thrusters, leaving it to fall freely.
The targeted touchdown site is a region in Meridiani Planum – a location that is near NASA’s Opportunity rover that is already on-duty.
Ringside seat?
How solid of a chance is it for the NASA Opportunity rover spotting the Schiaparelli sky show?
“It is exciting to think about the possibility of seeing a visitor coming,” said Mark Lemmon on the Opportunity tactical shift rover control group. He is associate professor in the Department of Atmospheric Sciences at Texas A & M University in College Station, Texas.
Lemmon told Inside Outer Space that there is a realistic possibility, but not a likelihood, of seeing part of Schiaparelli’s parachute descent – maybe one chance in seven.
Constrained downlink
“The parachute would be, at best, around pixel-sized. If there is enough residual glow in the heat shield, that could be a second pixel,” Lemmon said. “We are balancing the desire to maximize the odds of getting at least a few images of Schiaparelli with the constrained downlink we have available that sol [Martian day].”
“If we were talking about a flat plain, and without dusty season, we’d be trying to prune down our options,” Lemmon said. That is, image the entry phase, turn to image the parachute phase, maybe use multiple directions since the lander ellipse is so big – from west on a bit past north, in angle, he said.

Still beaming after all these years – NASA’s Opportunity Mars rover.
Credit: NASA/JPL
Robot’s point of view
But the Opportunity rover is in a hole. The Schiaparelli entry is not viewable, Lemmon said. If the European probe lands in the middle of the landing ellipse, or comes in short, nothing will be viewable. If the probe goes long, to the east, it might come over the crater rim from the rover’s point of view, and also be closer to the rover.
“We are watching the horizon,” Lemmon said. “Previously, we figured about one chance in seven of having the parachute go through the frame. We’d likely point to maximize the chance of seeing anything, but there may be arguments for one part of the descent over another.”
Great bonus
Lemmon added that any sharp-shooting of an incoming Schiaparelli has to cope with the martian dust, as the sky is comparable in brightness to the parachute.
“Because of that, we think we have to use [Opportunity’s] Pancam’s higher sensitivity to small objects and its filters, rather than Navcam’s larger field of view,” Lemmon said. “We’re still collecting information about the descent expectations, weather, and local horizon, and will use all of that for our final plans on October 17 when we uplink to the rover.”
Lemmon said that the ESA Schiaparelli team has been very interested in the images. Those images would be an “extra perspective” on Schiaparelli’s position, winds, maybe heat shield deployment.
“The images are not central to what they need,” Lemmon said, “but if we get them it would be a great bonus. We have a shot at watching an incoming spacecraft from the surface of another planet…good times!”

The ExoMars 2016 entry, descent, and landing demonstrator module, also known as Schiaparelli, will touch down on Meridiani Planum, a relatively smooth, flat region on Mars, on October 19, 2016. The lowest areas on this map are shown in green, while the highest areas are dark brown. The large crater on the right (East) of the image is Endeavour, which is about 14 miles (22 kilometers) in diameter. Opportunity has been studying its western rim since 2011.
Credit: ESA/IRSPS/TAS-I
Surface science
Once safely on the surface, the timeline will operate Schiaparelli’s science instruments for a planned two days – and possibly longer.
Sitting on Mars, a small meteorological station (DREAMS) will operate for a few days.
DREAMS is onboard to measure local weather conditions at the landing site, such as temperature, humidity, pressure, dust opacity, wind speed, and wind direction. It will also perform measurements of the electrical properties of the Martian atmosphere, the first time this has ever been done.

The Schiaparelli surface payload, based on the proposed DREAMS (Dust Characterisation, Risk Assessment, and Environment Analyser on the Martian Surface) package, consists of a suite of sensors to measure the wind speed and direction (MetWind), humidity (DREAMS-H), pressure (DREAMS-P), atmospheric temperature close to the surface (MarsTem), the transparency of the atmosphere (Solar Irradiance Sensor, SIS), and atmospheric electrification (Atmospheric Radiation and Electricity Sensor; MicroARES).
Credit: ESA/ATG medialab
The Mars orbiter was built by Thales Alenia Space – France, and the builder of the Schiaparelli lander is Thales Alenia Space – Italy.
For a new video showing the Schiaparelli landing sequence, go to:
http://m.esa.int/ESA_Multimedia/Videos/2016/10/Schiaparelli_s_descent_to_Mars

Curiosity Navcam Left B image taken on Sol 1480, October 4, 2016.
Credit: NASA/JPL-Caltech
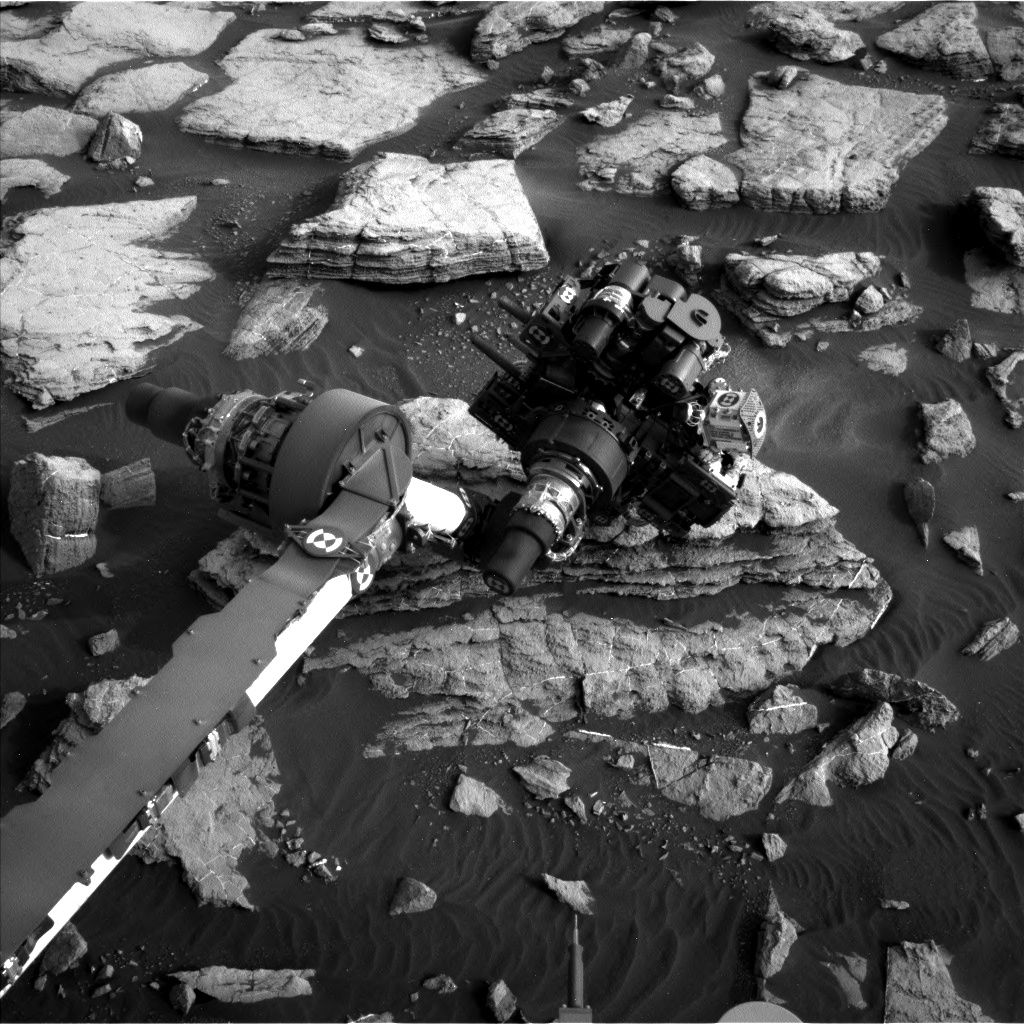
Now in Sol 1482, the Curiosity Mars rover drove another 115 feet (35 meters) on Sol 1480, stopping at a location with a layered bedrock exposure right in front of the rover.
“So the tactical planning team decided to take advantage of the touch and go option again,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Layered target
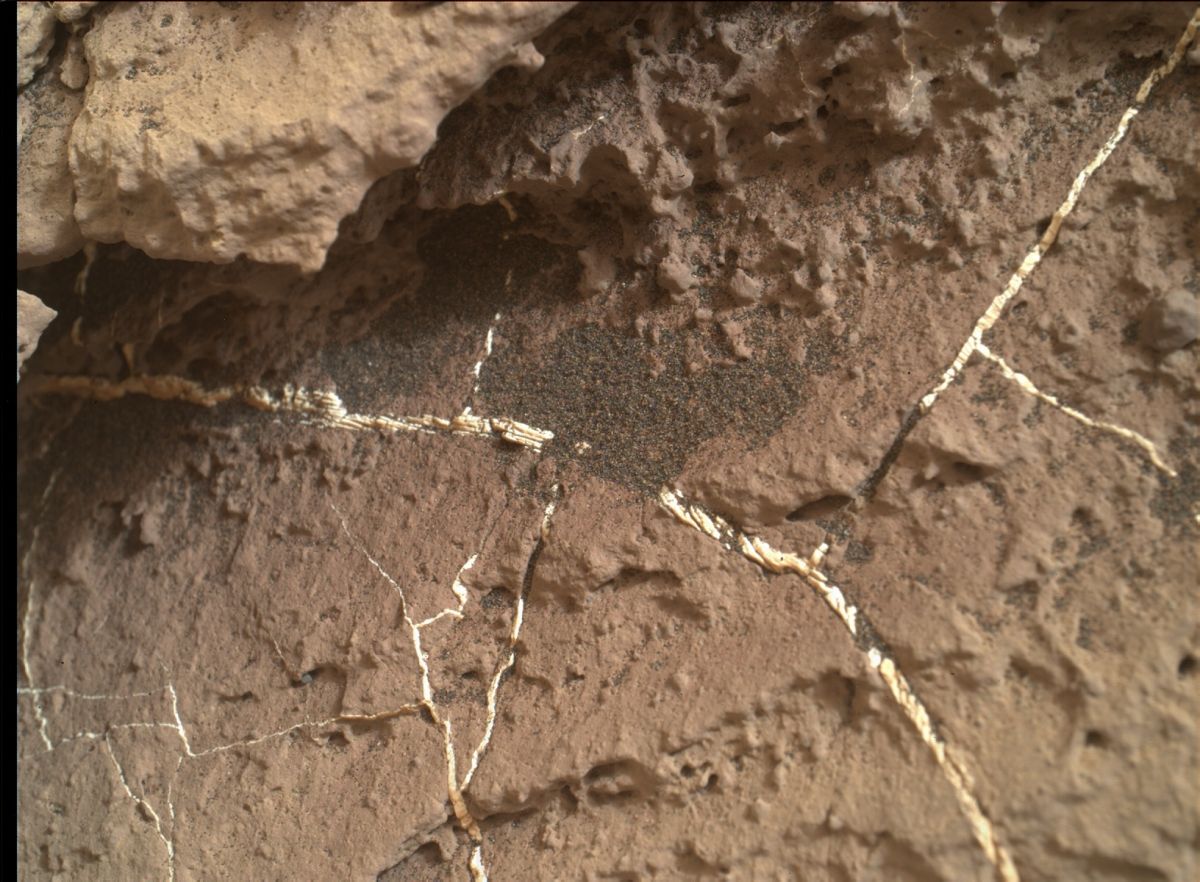
The robot’s Mars Hand Lens Imager (MAHLI) is taking pictures of the layered target “Cassongue” and of the rover wheels before the arm is stowed in preparation for another drive on Sol 1482.
Curiosity’s Chemistry and Camera (ChemCam) and Mastcam will observe bedrock targets named “Coutada,” “Cuangar,” and “Cacuso,” explains Herkenhoff, and the Right Mastcam will acquire mosaics of more distant targets dubbed “Lucusse” and “Lumeje.”
Also, the Left Mastcam will be used to image the wheels on the right side of the rover and to extend the coverage of the terrain in the direction Curiosity’s handlers plan to

Curiosity Mastcam Right image taken on Sol 1480, October 4, 2016.
Credit: NASA/JPL-Caltech/MSSS
drive.
Downlink priorities
“Because we don’t expect to receive as much data as usual in time for planning on Friday, the volume and downlink priorities of post-drive imaging data had to be carefully scrubbed,” Herkenhoff notes.
On Sol 1483, Autonomous Exploration for Gathering Increased Science (AEGIS) software will again be used to autonomously select a target for a ChemCam observation.

Curiosity road map for Mars:
Blue triangles mark waypoints investigated by Curiosity during the rover’s two-year prime mission and first two-year extended mission.
The Hematite Unit and Clay Unit are key destinations for the second two-year extension, through September 2018.
The base image for the map is from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter.
North is up. Bagnold Dunes form a band of dark, wind-blown material at the foot of Mount Sharp.
Credit: NASA/JPL-Caltech/Univ. of Arizona
In the distance: Murray Buttes
Also on tap is use of the rover’s Navcam to search for clouds. The robot’s Mastcam is scheduled to take an image of the rover deck to look for changes in the distribution of dust and other debris.
Lastly, Herkenhoff concludes, the rover’s Right Mastcam will take a look toward the east and acquire a 5-image mosaic of the Murray Buttes in the distance.
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Credit: Paul Duffield/G. Hüdepohl/ESO via METI International
To message or not to message? That’s the question to ponder when considering the Search for Extraterrestrial Intelligence. There’s on-going discussion and debate about giving ET the “hi-sign.”
It is dubbed Messaging Extra-terrestrial Intelligence, or METI for signaling shorthand.
Douglas Vakoch, President of METI International in San Francisco, California is author of a new and enlightening bit of correspondence, “In defence of METI,” published today in the journal Nature Physics.
Closer look
“At METI International, we’re committed to taking a closer look at the assumptions that have driven the search for life beyond Earth over the past half century, as we seek innovative alternatives to traditional SETI efforts,” Vakoch told Inside Outer Space.
“Sending intentional, powerful signals to potential extraterrestrial civilizations is one of our top priorities,” he said, “but we’re also expanding methods to search for life beyond Earth, and to anticipate the variety of life that may exist in the cosmos.”
Credit: Paul Duffield/G. Hüdepohl/ESO via METI International.
Cosmic static
Vakoch explains that SETI programs have typically focused on using a few very large telescopes.
“That makes good sense when you’re searching at radio frequencies, where you need incredible computing power to pull artificial signals out of the cosmic static…especially if you want to do a real-time follow-up of any candidate signals. It would be incredibly expensive to equip a lot of observatories with that capability,”Vakoch notes.
Optical SETI: Extend the network
But with optical SETI, Vakoch adds, Earthkind can launch powerful searches for brief laser pulses using only modest-sized telescopes, as long as they are paired with sophisticated signal processing capabilities.

The Boquete Optical SETI Observatory at Boquete, Panama.
Credit: Boquete Optical SETI Observatory
“Fortunately, with a bit of innovative engineering, it costs only a few tens of thousands of dollars to add that signal processing capability to an existing optical telescope,” says Vakoch.
One of the priorities at METI International’s over the next year is to extend the network of optical SETI observatories. Doing so, builds on the accomplishments of the facilities in Panama and Michigan that the group is already working with.

Optical SETI circuity.
Credit: Owl Observatory
Life as we don’t know it
“But we also need to step back and ask ourselves, “Is life as it we know it on Earth the only possibility?”
Next year, to help probe that question, METI International will host a daylong workshop called What is Life? – An Extraterrestrial Perspective. That meeting is being held at the National Museum of Natural History in Paris on March 22, 2017.
“We plan to continue these meetings in Paris every two years moving forward,” Vakoch adds. “Our first Paris meeting will bring together leading experts on subjects ranging from the origin of life to the evolution of intelligence, as we ponder the alternatives to life as we know it on Earth.”
Resources
To read the “In defence of METI” communiqué from Vakoch, here’s a link made available by the publisher at:
For more information on METI International, go to:
Also, check out this Ideacity 2016 video presentation Calling the Cosmos at:
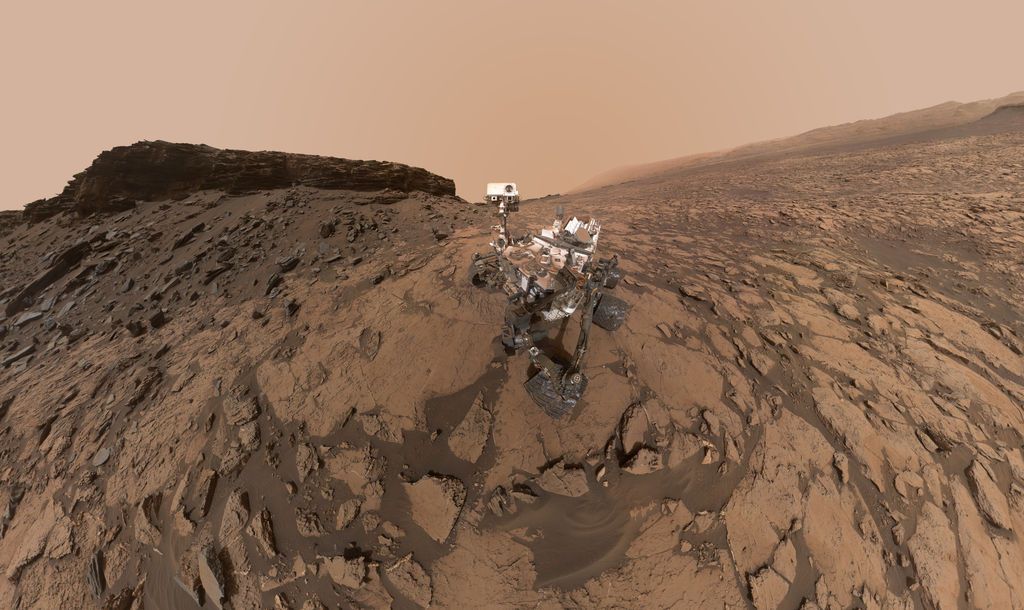
“Butte”-tiful” new self-portrait shows NASA’s Curiosity Mars rover at the “Quela” drilling location in the scenic “Murray Buttes” area on lower Mount Sharp. The panorama was stitched together from multiple images taken by the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s arm. The scene combines approximately 60 images
Credit: NASA/JPL-Caltech/MSSS
Now in Sol 1480, the NASA Curiosity Mars rover drove a little over 40 feet (12.5 meters) on Sol 1478, to an area with lots of nodules in the bedrock.
The rover’s tactical planning team decided to exercise the “touch and go” option, so the robot’s arm is deployed for contact science before driving away on Sol 1480.

Curiosity Navcam Left B image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech
Variety of activities
Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona notes that the scheduled plan “is packed with a variety of activities,” starting with a short Alpha Particle X-Ray Spectrometer (APXS) integration and Mars Hand Lens Imager (MAHLI) imaging of a nodule-rich target named “Oodi.”

Curiosity Navcam Left B image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech
Curiosity’s robotic arm is to be moved out of the way for Chemistry & Camera (ChemCam) and Right Mastcam observations of Oodi and nearby bedrock targets “Calenga” and “Caconda.”
Sedimentary structures
In addition, the rover’s Right Mastcam is slated to acquire images of targets dubbed “Chitembo,” “Chingufo,” and “Chipindo” to investigate sedimentary structures in more detail, Herkenhoff adds. Also to be studied is the rock that the Autonomous Exploration for Gathering Increased Science (AEGIS) software, selected for ChemCam chemical measurements.
Herkenhoff notes that the robot’s Mastcam is set to measure dust in the atmosphere before the next drive, followed by the usual post-drive imaging.

Curiosity ChemCam Remote Micro-Imager image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech/LANL
Overnight, the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) is on tap to analyze the Quela drill sample again, “to improve the quality of mineralogical measurements,” Herkenhoff points out.
Battery recharge
On Sol 1481, Curiosity’s Navcam will search for clouds.
AEGIS will autonomously select a target for ChemCam observations, and the results of the CheMin analysis will be read out of the instrument to the rover computer.

Curiosity Navcam Right B image taken on Sol 1478, October 2, 2016.
Credit: NASA/JPL-Caltech
Finally, the rover’s Sample Analysis at Mars (SAM) Instrument Suite “is to perform a maintenance activity before the rover gets some sleep and recharges her batteries in preparation for the next 2-sol plan,” Herkenhoff concludes.
Planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Abort test of New Shepard suborbital rocket.
Credit: Blue Origin
Blue Origin’s planned launch has been rescheduled to Wednesday Oct. 5. Refer to the Blue Origin Twitter, https://twitter.com/blueorigin, for more details.
The suborbital passenger rocket program of Blue Origin is to take a next step – a test of the New Shepard’s in-flight escape system.
Slated to take place on the anniversary of the launch of the Soviet Union’s Sputnik 1 satellite, the October 4th flight of the rocket involves triggering of the vehicle’s abort system after launch.
Blue Origin says that the New Shepard rocket itself, which is reusable and will be making its 5th flight, will likely be destroyed “and its impact with the desert floor will be most impressive.”

Rocketeer Jeff Bezos.
Credit: Blue Origin
The company’s private spaceport site is in Texas.
Dramatic ending
The Tuesday, October 4 test will be webcast on the company’s website beginning at 10:50 am ET.
“Our next flight is going to be dramatic, no matter how it ends,” says Jeff Bezos, lead rocketeer of the Blue Origin group and Amazon.com guru.
“We’ll be doing our in-flight escape test with the same reusable New Shepard booster that we’ve already flown four times,” Bezos adds.

Up, up, and away! Blue Origin repeat success of its New Shepard rocket from West Texas launch site.
Credit: Blue Origin
“About 45 seconds after liftoff at about 16,000 feet, we’ll intentionally command escape,” Bezos explains. “Redundant separation systems will sever the crew capsule from the booster at the same time we ignite the escape motor.”
Escape motor
The escape motor will vector thrust to steer the capsule to the side, out of the booster’s path. The high acceleration portion of the escape lasts less than two seconds, but by then the capsule will be hundreds of feet away and diverging quickly. It will traverse twice through transonic velocities – the most difficult control region – during the acceleration burn and subsequent deceleration.

New Shepard flight profile.
Credit: Blue Origin
The capsule will then coast, stabilized by reaction control thrusters, until it starts descending. Its three drogue parachutes will deploy near the top of its flight path, followed shortly thereafter by main parachutes.
Unlikely survival
“It’s the first ever rocket booster to fly above the Karman line into space and then land vertically upon the Earth. And it’s done so multiple times. We’d really like to retire it after this test and put it in a museum,” Bezos explains.

Gradatim Ferociter!
Blue Origin team paints a tortoise on their vehicles after each flight.
Credit: Blue Origin
“Sadly, that’s not likely. This test will probably destroy the booster. The booster was never designed to survive an in-flight escape,” Bezos adds.
Check out this animation of what’s to come at:
https://www.youtube.com/watch?v=N5i-f-D_A-M&feature=youtu.be
To watch the October 4th test flight, go to the firm’s website at:

SpaceX’s Elon Musk lays out visionary space agenda – a Mexican hat dance?
Credit: Rob Varnas
Elon Musk’s visionary space presentation in Mexico was inspirational, however, there is an unfortunate reality that companies like SpaceX, among others, will need to face.
Musk’s plans for Mars leave unanswered questions. At last week’s International Astronautical Congress, SpaceX CEO Elon Musk laid out his plans to build a sustainable city on Mars sometime in the next century.

Credit: SpaceX
Logistical gaps
While his plans are certainly exciting, Mia Brown, an affiliate of the Space Policy Institute at the George Washington University, argues they are full of logistical gaps and unanswered questions on everything from affordability, safety, and government regulation.

Credit: SpaceX
Go to:
Brookings Institute’s TECHTANK – The view from tomorrow: Challenges to regulating commercial space travel by Mia Brown at:

Curiosity Mastcam Left image taken on Sol 1475, September 29, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover on Mars is now in Sol 1477 – wheeling toward a new drill spot.
“Everything went well in our previous plan and we are making slow but steady progress over rough terrain toward our next drill location,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona. “We should get there by next weekend!”
As scripted, the rover is slated to perform remote sensing on Sol 1477.

Curiosity Mastcam Left image taken on Sol 1475, September 29, 2016.
Credit: NASA/JPL-Caltech/MSSS
Chadibe, Bobonong, Dukwi, Etsha
The robot’s Navcam has an atmospheric observation, followed by Chemistry and Camera (ChemCam) analysis of the targets “Chadibe,” “Bobonong,” and “Dukwi.”
Curiosity’s Mastcam will document those targets once ChemCam is done with them.
Mastcam also has a small mosaic of the target “Etsha” to study its fine-scale layers, and a larger mosaic to extend the drive-direction pan from Sol 1475, adds Anderson.

Curiosity Navcam Left B image taken on Sol 1476, September 30, 2016.
Credit: NASA/JPL-Caltech
The Etsha mosaic will be repeated again later in the day. In the evening, the Alpha Particle X-Ray Spectrometer (APXS) will analyze overnight the chemistry of the target “Caugula” and “Catumbela.”
Brushing off Catumbela
“We will brush the dust off of Catumbela before the overnight analysis,” Anderson notes, and the rover’s Mars Hand Lens Imager (MAHLI) will take images of the targets to support APXS.
On Sol 1478, ChemCam has observations of Catumbela and “Francistown,” with Mastcam support.

Curiosity Navcam Left B image taken on Sol 1475, September 29, 2016.
Credit: NASA/JPL-Caltech
Auto-targeting
Scheduled for later in the day, the robot’s ChemCam will do an automatically targeted Autonomous Exploration for Gathering Increased Science (AEGIS) observation and use its Mars Descent Imager (MARDI).
Lastly, on the plan for Sol 1479 is a full routine of engineering activities, so no science blocks were scripted for the rover to perform.

Curiosity Mastcam Right image taken on Sol 1475, September 29, 2016.
Credit: NASA/JPL-Caltech/MSSS
Performing planned rover activities are always subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
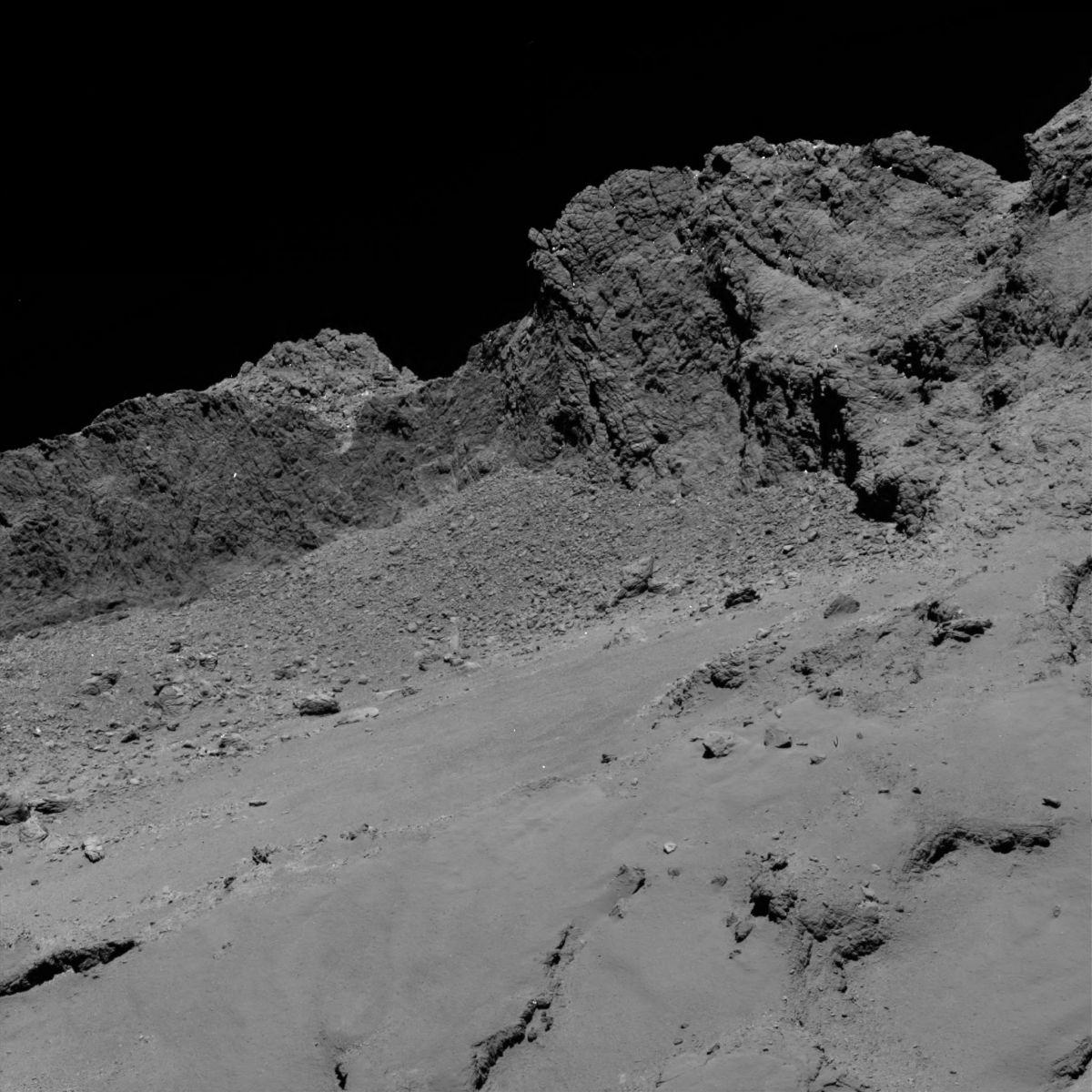
Rosetta’s OSIRIS narrow-angle camera captured this image of Comet 67P/Churyumov-Gerasimenko at 01:20 GMT from an altitude of about 16 km above the surface during the spacecraft’s final descent on 30 September.
The image scale is about 30 cm/pixel and the image measures about 614 m across.
Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The European Space Agency’s Rosetta spacecraft today made a controlled descent onto comet 67P/Churyumov-Gerasimenko surface, bringing its mission to a close.
The spacecraft was launched in 2004.
Rosetta studied the comet’s nucleus and environment as it was moving around the Sun.
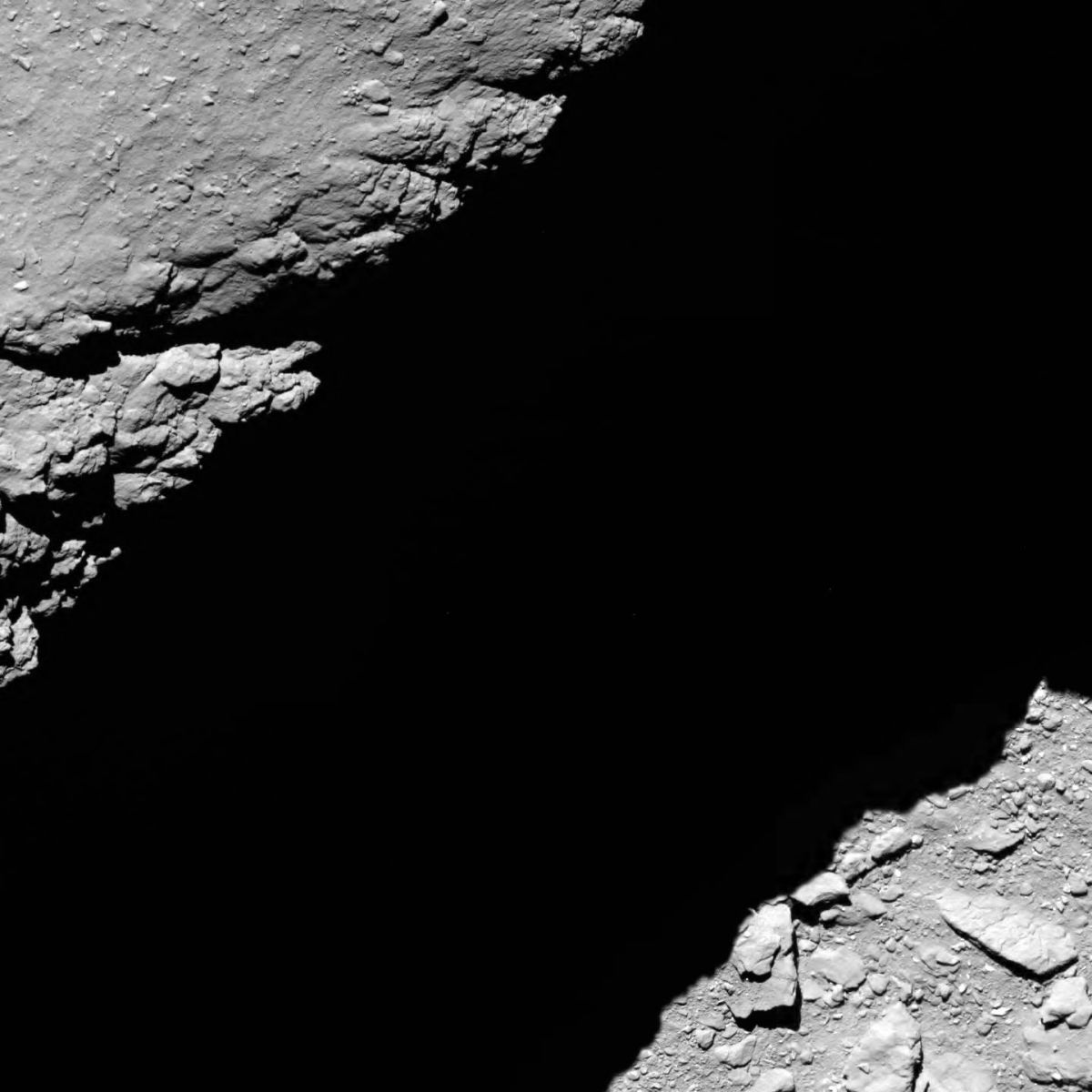
Rosetta’s OSIRIS narrow-angle camera captured this image of Comet 67P/Churyumov-Gerasimenko at 10:14 GMT from an altitude of about 1.2 km during the spacecraft’s final descent on 30 September.
The image scale is about 2.3 cm/pixel and the image measures about 33 m across.
Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
In late 2014, Rosetta deployed the lander Philae to the surface of 67P.
Huge amount of data
Communications with the orbiter ceased as it reached the comet’s surface. However, the huge amount of data the spacecraft has sent to Earth since 2014 will likely lead to new scientific findings for many years following the end of the Rosetta mission.

Rosetta’s last image of Comet 67P/Churyumov-Gerasimenko, taken shortly before impact, at an altitude of 51 meters above the surface.
The image was taken with the OSIRIS wide-angle camera on 30 September.
The image scale is about 5 mm/pixel and the image measures about 2.4 m across.
Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Mysteries to solve
Confirmation of the end of the mission arrived at ESA’s control centre in Darmstadt, Germany at 11:19 GMT (13:19 CEST) with the loss of Rosetta’s signal upon impact.
“Inevitably, we now have new mysteries to solve. The comet hasn’t given up all of its secrets yet, and there are sure to be many surprises hidden in this incredible archive. So don’t go anywhere yet – we’re only just beginning,” said project scientist Matt Taylor in an ESA press statement.


Curiosity Mastcam Left image taken on Sol 1473, September 27, 2016.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is busily at work, carrying out Sol 1475 duties.
“The science team had a lot of good ideas for new observations, so it was a challenge to fit them all into the plan, but in the end all went well,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
Brush spot
Curiosity Navcam Left B image taken on Sol 1474, September 28, 2016.
Credit: NASA/JPL-Caltech
On Sol 1475, the rover’s robotic arm is to be moved out of the way to allow Chemistry and Camera (ChemCam) and Mastcam multispectral observations of the “Jwaneng” brush spot and an outcrop target named “Munhango.”
The Right Mastcam is slated to acquire mosaics of targets dubbed “Luremo,” “Nata,” and “Maun” before the rover drives away, Herkenhoff adds.
Auto-software
“In addition to the usual post-drive imaging, ChemCam will autonomously acquire chemical data on a target selected by the AEGIS software,” Herkenhoff notes. AEGIS software stands for Autonomous Exploration for Gathering Increased Science.
NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on September 28, 2016, Sol 1474.
Credit: NASA/JPL-Caltech/MSSS
Furthermore, the rover’s Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) is set to analyze the latest drill sample overnight.
Clouds, dust, sky observations
While the new data are being read out the next morning, Mastcam will measure the dust in the atmosphere. Additionally, Navcam will search for clouds, and ChemCam will acquire passive spectra of the sky.

This map shows the route driven by NASA’s Mars rover Curiosity through the 1471 Martian day, or sol, of the rover’s mission on Mars.
Enlarge to view dot numbers indicating the sol number of each drive. North is up.
From Sol 1469 to Sol 1471, Curiosity had driven a straight line distance of about 141.77 feet (43.21 meters).
Since touching down on Mars in August 2012, Curiosity has driven 8.91 miles (14.34 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
“These atmospheric observations will be repeated at noon to look for short-term changes,” Herkenhoff explains. “Finally, the rover will get some sleep in preparation for what will likely be a busy weekend.”
As always, dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

Curiosity Front Hazcam Right B image taken on Sol 1474, September 28, 2016.
Credit: NASA/JPL-Caltech
The Mars Curiosity Mars rover is just sliding into Sol 1475.
Word is that the roughly 53-feet (16-meter) drive on Sol 1473 was completed perfectly.
Curiosity is now in position for contact science on an outcrop of cross-bedded Murray bedrock.

Curiosity Navcam Right B image taken on Sol 1474, September 28, 2016.
Credit: NASA/JPL-Caltech
Cross-bedding
The primary goal for Sol 1474 was to characterize the cross-bedding and measure grain sizes using the Mars Hand Lens Imager (MAHLI) amongst a number of good observations.
Prior to the robot’s arm deployment, the Chemistry and Camera (ChemCam) instrument will measure the chemical composition of the “Kopong” bedrock target. Mastcam is to acquire mosaics of the Kopong outcrop and a couple of blocks behind it. And the rover’s Navcam will search for clouds, explains Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.
“The arm activities start with a full suite of MAHLI images of Kopong and a MAHLI mosaic of the left side of the outcrop, dubbed “Utuseb,” Herkenhoff adds.
Brush off
Follow on activities scripted was the brush off of the “Jwaneng” target, with MAHLI images taken before and after the brushing.
Also on the duty list is for the rover’s Alpha Particle X-Ray Spectrometer (APXS) instrument to be placed 0.5 centimeter from the center of the brushed spot for a short evening integration.

NASA’s Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on September 28, 2016, Sol 1474.
Credit: NASA/JPL-Caltech/MSSS
APXS will then be moved to the center of the brushed spot for an overnight integration.
“Finding good contact science targets that could be safely brushed and imaged was a challenge,” but the tactical team did a great job added Herkenhoff.

