Author Archive

Credit: Aeon
When we look for aliens, why do we always find ourselves staring back?
Narrated by the British science writer Philip Ball, an Aeon original video argues that, in order to stand a chance of succeeding, the modern scientific search for aliens needs to ditch science fiction’s frequently simplistic and solipsistic views in favor of a truly bold approach to imagining extraterrestrial life.
Human-inflected conception
Humans have long imagined beings in other worlds or on other planets whose emotions, motivations and physiologies closely mirror our own. Science fiction in its many forms tends toward a human-inflected conception of non-human life out in the Universe.

Graphic above by Danielle Futselaar is the famous Drake Equation, representing the full spectrum of science undertaken at the SETI Institute. Wherever you are on Earth, the Drake Equation represents all explorations of our lives, and life beyond our home planet.
Credit: Danielle Futselaar/SETI Institute
The view of aliens as rather like us is fine for ancient myths and Hollywood blockbusters, but even modern scientists can’t seem to shake the notion that extraterrestrials’ decisions and behavior would follow logic and patterns akin to our own.
Many of the major scientific projects seeking life elsewhere in the cosmos still rely on assumptions that reflect, above all, ideas about how we would do something if we were aliens.
To view this thought-provoking video, go to:
Space Traffic Management – New Report Calls for Civil Government Agency to Deal with Orbital Clutter

Credit: SAIC
A recently released report has taken a hard look at “traffic management” of the space domain – an environment increasingly cluttered by orbiting space debris.
The study – Orbital Traffic Management Study: Final Report – Report on Space Traffic Management Assessments, Frameworks and Recommendations was issued November 21 by Science Applications International Corporation (SAIC).
The report was done for NASA as required by the Commercial Space Launch Competitiveness Act.
Current framework
As noted by Marcia Smith’s SpacePolicyOnline.com: “SAIC is recommending that a civil government agency take responsibility for orbital traffic management, but it does not specify which agency that should be.”

Clutter in the cosmos.
Credit: Used with permission: Melrae Pictures/Space Junk 3D
Smith explains that the Federal Aviation Administration (FAA) and its parent, the Department of Transportation (DOT), are often the center of attention in orbital — or space — traffic management discussions, but SAIC explained that the terms of reference for its study did not ask for such a recommendation.
“SAIC concluded that the current framework — where DOD [Department of Defense] tracks space objects and provides conjunction analyses to other U.S. government as well as commercial and foreign entities — is insufficient and a ‘holistic approach’ is needed, led by a civil government agency,” SpacePolicyOnline.com observes.
In the report, no assumptions or recommendations are made as to which specific civil agency could or should be designated – such a recommendation was not specified by Congress as a report product.
Alternate frameworks
Smith notes that the study lays out five alternative frameworks:
- Private space traffic monitoring and coordination,
- DOD-based space traffic safety monitoring and data sharing (status quo),
- Civil-based space traffic safety monitoring and facilitation
- Civil-based space traffic safety monitoring and coordination
- Civil-based space traffic management.
It compares them in terms of three objectives:
- Ensure safety of the space domain
- Protect and enhance national security space interests
- Ensure the economic vitality of the space domain and space industrial base
Organizational evolution
One author of the report, David Finkleman of SkySentry, LLC, told Inside Outer Space that the space traffic management (STM) study recommends an “organizational evolution” for STM.
“This was the charge from Congress. It recognizes that STM is global, not achievable by the U.S. alone. Any satellite owner or operator who declines collaboration is a threat to all and is himself at risk,” Finkleman explains.
“The state of satellite traffic is a serious environmental concern but not a catastrophe,” Finkleman notes.
“Action recommended by the STM report will make catastrophe much less likely,” adding that this is his personal opinion, not the position of SAIC, NASA, the U.S. Government, or any organization with a stake in STM.
International problem
Similar in view, and another author of the SAIC report, is Theresa Hitchens of the Center for International and Security Studies at Maryland at the University of Maryland in College Park. “This is an international problem, and requires an international solution. A U.S. system must be coordinated with other space-faring and space-using nations,” Hitchens told Inside Outer Space.
“This also means that however a U.S. civil agency is designed,” Hitchens advised, “it must be able to relatively freely share orbital positioning data with other nations, as well as integrate data from outside the U.S. military. That is…Space Situational Awareness (SSA) must become multi-stakeholder. Otherwise, a U.S. civil agency on top of a U.S. military controlled data pool becomes only another layer of bureaucracy that industry must pass through, and does nothing much to improve the space traffic situation,” she said, also noting her views are her own, not on behalf of SAIC or NASA.

Orbital debris is a space environmental problem.
Credit: Lockheed Martin
Trackable space objects
The nearly 120-page SAIC report offers a number of interesting perspectives, such as spotlighting the likelihood of space traffic safety incidents. It is predicted that about one collision will occur per year between tracked non-maneuvering space objects and debris greater than one centime-size in the low Earth orbit (LEO) region.
The overwhelming majority of trackable space objects are categorized as orbital debris, states the SAIC study.
“Of the approximately 23,000 cataloged space objects (all greater in size than 10 cm), only about six percent are (operational) spacecraft. A little more than about one quarter of all (operational) spacecraft are U.S. private owned and operated. This is two percent of all cataloged space objects. Not all of the (U.S.) private spacecraft can be maneuvered propulsively (especially CubeSats).”
Credit: SAIC
Star-crossed constellations
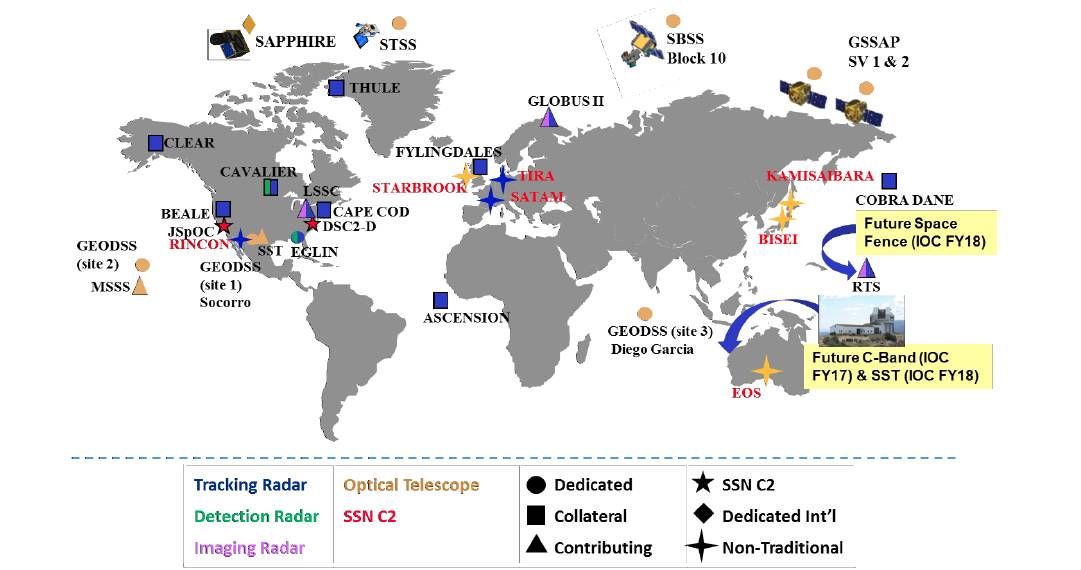
The report notes that some proposed new large constellations of small satellites could add thousands more spacecraft to the space catalog over a few years. Also, it is estimated that once the new “Space Fence” satellite situational awareness radar system becomes operational, the number of space objects in the space catalog could increase by approximately 60,000.
“This estimated increase will add complexity to the current conjunction assessment process, although the additional burden may be offset by a beneficial reduction in space object orbit uncertainty used to determine probability of collisions,” the report explains.
As flagged in the report, “there are no explicit or implicit national or international–level requirements for space traffic management (STM) under treaties and other legally-binding international agreements, to which the United States is a party.”

In-orbit explosions can be related to the mixing of residual fuel that remain in tanks or fuel lines once a rocket stage or satellite is discarded in Earth orbit. The resulting explosion can destroy the object and spread its mass across numerous fragments with a wide spectrum of masses and imparted speeds.
Credit: ESA
Debris-producing events
The SAIC study compiled a list of the top worst debris-producing events, noting:
- The Iridium/Cosmos collision is the only debris-producing incident on the list known to be caused by an unintentional collision.
- The China anti-satellite (ASAT) test of 2007 ranks as the event causing the largest number of pieces of debris.
- Six of the remaining seven events on the compiled list were the result of orbital breakup (explosions), and in the remaining incident, the cause is unknown.
- The likelihood of orbital breakup is very much a function of the spacecraft design features and the physical behavior of the satellite’s systems that contain energy (propellant tanks, pressurant tanks, batteries, and momentum wheels). The recent orbital breakups of three DOD Defense Meteorological Satellite Program (DMSP) satellites caused by battery-associated events are a good example of such debris generating events (this satellite series was designed and approved before orbital debris mitigation requirements were established in the United States).
- A recent example of an orbital breakup that was somewhat unusual is Japan’s Hitomi X-ray observatory. Because of a design error, this satellite literally spun itself out of control with such a rate of rotation that it came apart.
Credit: SAIC
Space station concerns
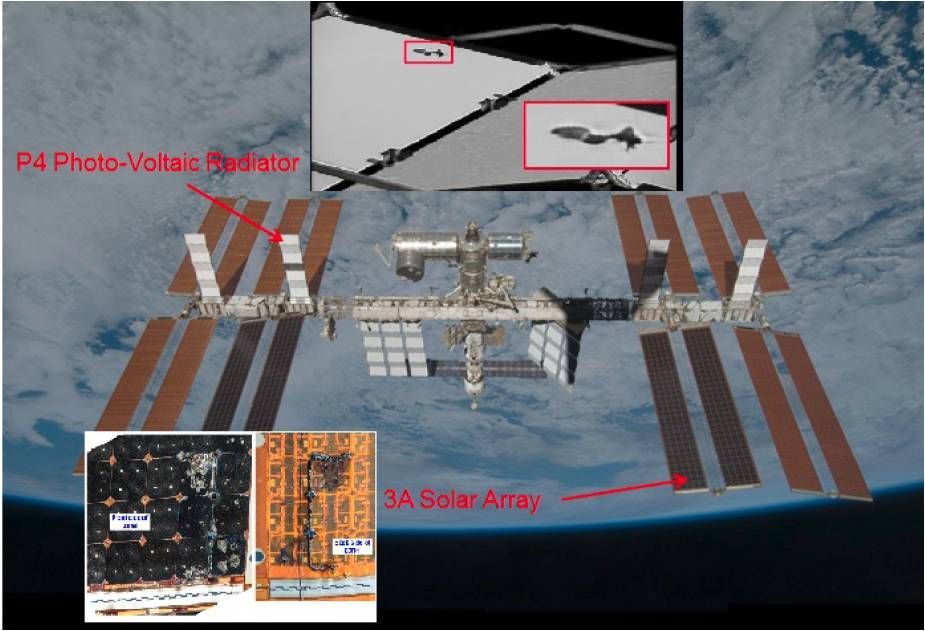
The SAIC report includes a look at the International Space Station and the threat of orbital debris hits to the orbiting complex.
As debris populations grow in LEO, the odds of Micrometeoroids and Orbital Debris (MMOD) root cause events on ISS will become higher (i.e. worsen); but, the SAIC study did not find any analysis that quantified this increased risk.

Chunk of junk zips by the International Space Station.
Credit: NASA
Recent analysis by the Aerospace Corporation on new large LEO constellations, the SAIC study observes, found that such constellations could increase the number of collision warnings with ISS six-fold, for example, as the decommissioned spacecraft in those constellations decay through the ISS orbit. This result does not correspond to a direct increase in the odds of a MM/OD root cause event, “but does show that risk can go up,” the SAIC report explains.
Resources
To access the SAIC report on Space Traffic Management Assessments, Frameworks and Recommendations, go to:
For the informative review of the study by Marcia Smith’s SpacePolicyOnline.com, go to:

Virgin Galactic’s VSS Unity makes 2nd non-powered glide test.
Credit: Virgin Galactic
“Release…release…release.”
Those are the words heard as the second glide flight of Virgin Galactic’s VSS Unity began yesterday, released from the WhiteKnightTwo mothership.
The December 22 drop test took place high above California’s Mojave Air and Space Port – the second free-flying shakeout of the suborbital spaceship.
2nd drop test
The craft’s first unpowered glide flight occurred on December 3, marking the start of a series of test flights for the SpaceShipTwo.
Piloting the vehicle down to a smooth tarmac touchdown: Virgin Galactic’s Mark Stucky and Dave Mackay – the same twosome that flew the December 3rd drop test.
Data review
From George Whitesides, Virgin Galactic CEO:
“Second glide flight of VSS Unity completed. Well done to the pilots and the whole crew. Great way to end the year!”
“Next up…data review and holidays,” explains a Virgin Galactic twitter.
These glide flights are the first of many, to gather test flight data on how VSS Unity performs in a wide variety of real-world flight conditions. Future flights will involve the critical rocket powered phase of the test flight program. The goal of Virgin Galactic is to create a commercial, suborbital passenger-carrying business.
The first SpaceShipTwo, VSS Enterprise, flew 54 times prior to its test flight accident in October 2014. That mid-air mishap led to loss of life of the craft’s co-pilot, seriously injuring the other pilot.

Curiosity Navcam Left B image taken on Sol 1555, December 21, 2016.
Credit: NASA/JPL-Caltech
Now in Sol 1557, NASA’s Curiosity Mars rover is prepped for the holidays.
“But that doesn’t mean that Curiosity will be resting,” reports Lauren Edgar, a research geologist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Edgar notes that a group of science team members and operations staff assembled an eight-sol plan that will execute over December 22-30.
That plan is focused on environmental monitoring and change detection.
Fracture patterns
Yesterday’s tactical planning was aimed at creating a 3-sol plan that will take place over New Year’s, from December 31- January 2.
“When we return to normal operations on January 3, we’ll dive right back in to a campaign investigating some interesting fracture patterns at “Old Soaker.”

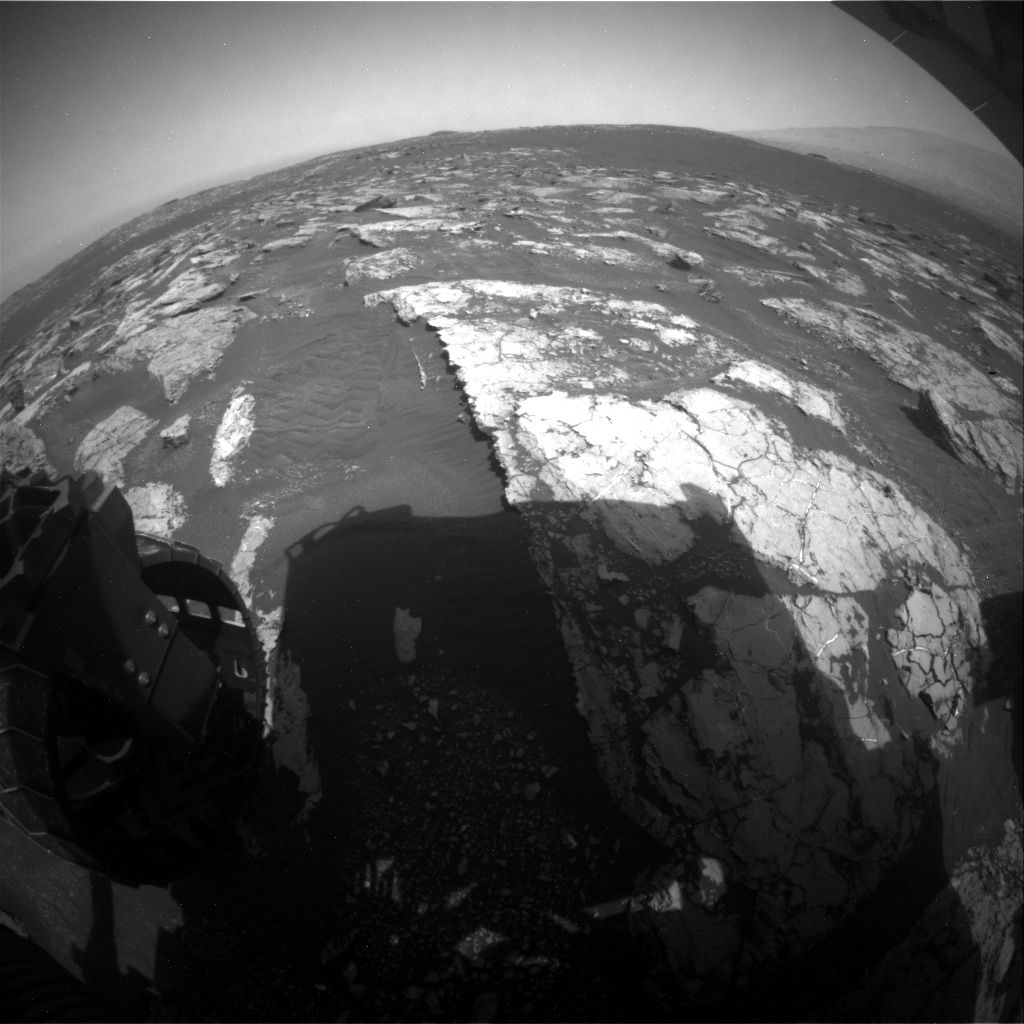
“Old Soaker” image taken by Curiosity’s Mastcam Left on Sol 1553, December 18, 2016.
Credit: NASA/JPL-Caltech/MSSS
A recently implemented three-sol plan started with Mastcam multispectral observations of the targets “Old Soaker” and “Schooner Head” to assess their red and gray color variations.
This was to be followed by a Navcam observation to search for dust devils.
Variations in chemistry
The robot’s Chemistry & Camera (ChemCam) was then to target “Moore Harbor” and “Northeast Harbor” to look for variations in chemistry.
Also on tap, use of Curiosity’s Mars Hand Lens Imager (MAHLI) to investigate the grain size and sedimentary structures at “Bar Island,” Thompson Island,” and “Mill Field,” and overnight the plan called for Alpha Particle X-Ray Spectrometer (APXS) study of “Mill Field” and “Thompson Island.”
On the agenda for the second sol, movement of the APXS to “Bar Island” was scheduled for an overnight integration, along with a Sample Analysis at Mars (SAM) Instrument Suite electrical baseline test.

Curiosity Navcam Left B image taken on Sol 1555, December 21, 2016.
Credit: NASA/JPL-Caltech
“On the third sol we’ll retract the arm to enable additional remote sensing of the workspace, including ChemCam on “Goose Cove,” “Deep Cove,” and “Dix Point,” a small Mastcam mosaic, and some environmental monitoring observations,” Edgar reports.
Quite the year
“It should be a busy week for Curiosity, and I’m looking forward to seeing all of the exciting data that she’ll collect while the team is enjoying a break,” Edgar adds. “It’s been quite the year for our rover.”
Edgar notes that Curiosity has drilled six holes, performed two scoops, driven 1.9 miles (three kilometers), and climbed 85 vertical meters – some 279 feet.
“I can’t wait to see what 2017 will bring,” Edgar concludes.
As always, actual implementation of planned rover activities is subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

NASA Mars Reconnaissance Orbiter’s HiRISE image of recurring slope lineae (RSL) in Melas Chasma, Valles Marineris. Arrows point out tops and bottoms of a few lineae.
Credit: NASA/JPL-Caltech/University of Arizona
They are called recurring slope lineae – RSL for Mars shorthand.
Spacecraft orbiting the Red Planet have focused on these perplexing features. RSL are spotted as narrow dark features on Mars that incrementally lengthen down steep slopes, fade in colder seasons, and recur annually.
These qualities seemingly imply that liquid water is flowing in the shallow subsurface of Mars today.
Real-time liquid water
Indeed, recent observation of hydrated salts associated with recurring slope lineae in several locations on Mars has created excitement over the possibility of “contemporary” (real-time) liquid water flows on that cold, distant planet.
Hydrated salts are crystalline solids such as sodium chloride dihydrate; although in the solid phase, these salts can form by precipitating from aqueous solutions.

Features called recurrent slope lineae (RSL) have been spotted on some Martian slopes in warmer months. Some scientists think RSL could be seasonal flows of salty water. Red arrows point out one 0.75-mile-long (2 kilometers) RSL in this image taken by NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
Another hypothesis
But new research by Raina Gough and Margaret Tolbert at the University of Colorado at Boulder suggest another hypothesis for RSL on Mars.
At the recent meeting of the American Geophysical Union (AGU) they reported it is also possible that such solid salts can form via absorption of atmospheric water vapor by anhydrous or less hydrated salts.
“Such a pathway would not require liquid water on any scale on current Mars, and therefore the hypothesis that RSL are due to recent liquid water would be weakened,” they suggested.
Lab experiments
At the AGU gathering in San Francisco, the researchers reported on the results of laboratory experiments that address the likelihood of these two hydrate formation pathways specifically for perchlorate and chloride salts observed in Martian RSL.
They used a Raman microscope and environmental cell to study hydrated salt formation under Mars-relevant temperature and humidity conditions.
Moreover, the scientists attempted to form these Mars-relevant hydrated salts by recrystallizing perchlorate or chloride brines and also by increasing the humidity around their anhydrous salts.
They identified which particular hydrated salts, if present, would be the best markers of recent liquid water in the shallow subsurface because their water vapor-induced hydration is kinetically or thermodynamically hindered.
To date, their findings remain subject to peer-review.
Counterpoint
However, David Stillman, a senior research scientist at the Southwest Research Institute (SwRI), also in Boulder, Colorado, advised Inside Outer Space that perchlorates are everywhere on Mars – as indicated by the Viking and Phoenix Mars landers, as well as the Curiosity rover now wheeling about on the Red Planet.

Selfie taken earlier of NASA’s Curiosity Mars rover. It too found a carpet of perchlorate on the Red Planet.
Credit: NASA/JPL-Caltech
“Hydrated perchlorates have only been detected officially at four other locations. These locations all are RSL sites. Plus, the hydration of the perchlorates goes away when RSL are not found at these sites,” Stillman said.
In response to the Gough and Tolbert research, Stillman said:
“So yes, hydrated perchlorates do not guarantee liquid water, but since no other place on Mars has hydrated perchlorates, why would RSL locations be the only place where perchlorate became hydrates especially if the source of the water was atmospheric?”
Messages from Valles Marineris
In a forthcoming paper in the scientific journal, Icarus, Stillman and colleagues Timothy Michaels of the SETI Institute, and Robert Grimm, also of SwRI, have charted the characteristics of the numerous and widespread recurring slope lineae within the Red Planet’s huge canyon system, Valles Marineris.

Valles Marineris RSL are found in every major canyon except Echus Chasma.
Credit: D.E. Stillman et al.,
The researchers detail seasonality for RSL in Valles Marineris and that RSL occur on sulfate-rich (evaporite-deposits) layered deposits.
Making use of the Mars Reconnaissance Orbiter’s High Resolution Imaging Science Experiment (HiRISE), Stillman and his associates have identified numbers of candidate and confirmed RSL sites within all the major canyons of Valles Marineris, with the exception of Echus Chasma. Hundreds of RSL sites have been detected on relatively dust-free steep slopes.
The work was performed under a NASA Mars Data Analysis Grant.
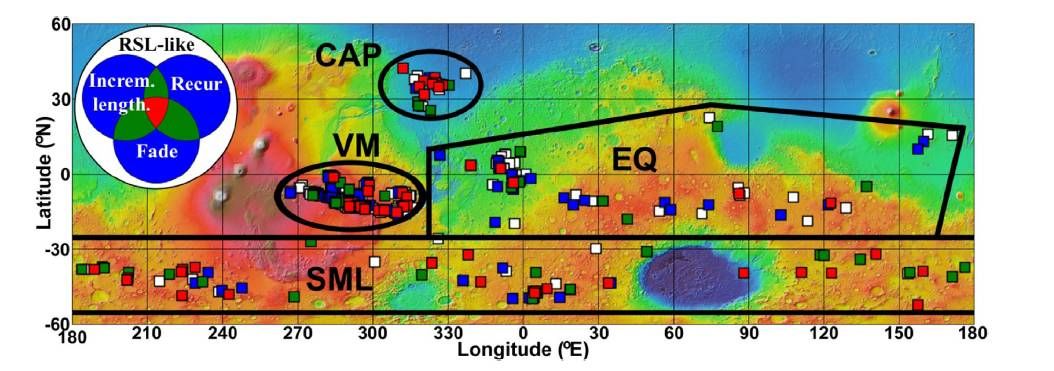
Global distribution of RSL sites and the four RSL regions from 60°N to 60°S.
Credit: D.E. Stillman et al.
Annual recharge
Still to be understood are the mechanism(s) by which RSL are recharged annually.
The team reports that there are always RSL lengthening within Valles Marineris, regardless of the season. “If RSL are caused by water, such a long active season at hundreds of VM RSL sites suggests that an appreciable source of water must be recharging these RSL,” they write.

Candidate spur-and-gully Valles Marineris RSL site in SE Candor Chasma that has slope streaks nearby. Shown are candidate RSL that merge downhill and incrementally lengthen, highlighted with arrows. (c) Overview of site. Slope streaks cover the W-facing slopes of the brighter (further east) spur, while candidate RSL are only seen on a small fraction of the darker spur. The center of this image is located at 8.596°S, 294.282°E. (d) Image of the most recent slope streak, roughly 1,148 feet (350 meters) in length.
Credit: D.E. Stillman et al.
Overall, understanding more fully how RSL form and recur can benefit the search for existing life on Mars and could provide details about an in situ water resource, the team writes.
So what next for RSL studies?
For one, these features could come under enhanced scrutiny by a proposed Mars 2022 orbiter the researchers suggest, provided it could acquire more frequent images of specific sites and have greater imaging coverage.
Also, higher-resolution thermal imaging could explore the brine content of the RSL.

Melas Chasma’s Ancient Lake. A small basin (center foreground) lies below the southern rim of Melas Chasma, part of Valles Marineris. The basin likely holds ancient lakebed sediments, which earned it a place on the list of potential landing sites for NASA’s 2020 rover. This view looks west down Melas Chasma (no vertical exaggeration).
Credit: NASA/JPL-CALTECH/Arizona State University, R. Luk
Candidate RSL are near the SW Melas, one prospective landing site of eight now in the running for NASA’s Mars 2020 rover. SW Melas is part of Valles Marineris.
Year-round access to water
“Landers or penetrators could provide even greater detail for individual RSL and best determine the RSL flow mechanism and salinity. Determining how RSL recharge and flow is important, as these features could be the most accessible location to determine if Mars has extant life,” the team writes in their Icarus paper.
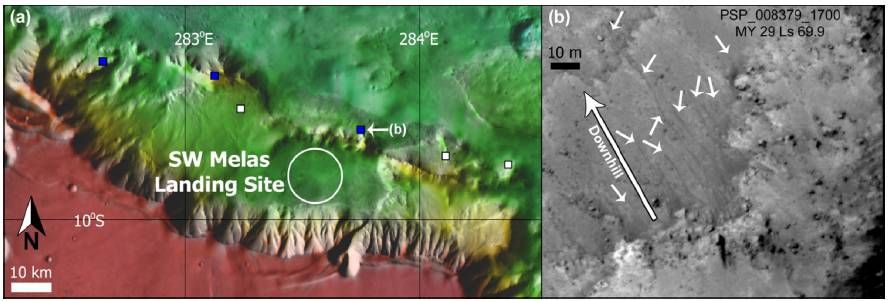
Candidate RSL near the potential SW Melas Mars 2020 rover landing site – one of eight now under review.
Credit: D.E. Stillman et al.
Perhaps RSL are too briny to allow life? If so, then planetary protection could be eased for human exploration.
If RSL are found to be sourced by local or regional aquifers, drilling sites could be located on nearby flat terrain and access water year-round. Such aquifers could be detected using surface-based geophysical exploration and then accessed via drilling, the RSL investigators suggest.

Artist’s illustration showing crewmembers arriving at their pre-deployed Mars Ice Home.
Credit: SEArch/Clouds AO
Ice Home is a deployable Mars habitat concept based on an inflatable structure that makes use of In Situ Resource Utilization (ISRU) derived water ice.
This off-world home could provide a large, flexible, and cost effective workspace that can be used for many of the key activities that are essential for the long term success of a human outpost on Mars.

An inside look at the makeup of the Mars Ice Home.
Credit: SEArch/Clouds AO
The prospect of accessible ice on the Red Planet warms the heart of a collaborative group at the NASA Langley Engineering Design Studio in Hampton, Virginia – an expert team that is chipping away at blueprinting a Mars Ice Home.
For more information, go to my new Space.com story:
‘Mars Ice Home’: Team Chips Away at Off-Earth House’s Design
December 21, 2016 07:30am ET
http://www.space.com/35101-mars-ice-home-design.html
NOTE: Also, here’s a special website for more details on the team effort:
http://www.cloudsao.com/MARS-ICE-HOME

Curiosity Navcam Left B image taken on Sol 1552, December 17, 2016.
Credit: NASA/JPL-Caltech
Now in Sol 1555, the Curiosity Mars rover made a short weekend drive. The robot is now at a new location “with plenty of science targets to choose from,” reports Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona. “It has been quite a while since we had a plan with this many new target names!”
The Sol 1555 plan starts off with a remote sensing science block. Navcam and Mastcam both have atmospheric observations, and then the Chemistry & Camera (ChemCam) will analyze four targets: “Somes Sound,” “Schoodic Peninsula,” “South Bubble,” and “Schooner Head.”

Curiosity acquired this Mars Hand Lens Imager (MAHLI) photo on December 17, 2016, Sol 1552. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Curiosity’s Mastcam is slated then to acquire a number of mosaics covering the targets “Old Soaker,” “Squid Cove,” “Sieur de Monts,” “Goat Trail” and “Bald Peak.”
Short bump
Later on Sol 1555, the plan calls for a short “bump” to position the rover for possible contact science, Anderson explains. “After the bump, we’ll collect some post-drive images to help with targeting.”
On Sol 1556, on the schedule is use of the robot’s Navcam to make an atmospheric observation to watch for clouds.
Sol 1557 is slated to involve a routine engineering diagnostic activity for the Hazcams, “but otherwise Sols 1556 and 1557 are pretty quiet,” Anderson concludes.
Curiosity Rear Hazcam Right B image taken on Sol 1554, December 19, 2016.
Credit: NASA/JPL-Caltech
Dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Traverse map
The Jet Propulsion Laboratory’s Curiosity website has posted a new “Traverse Map” showing the robot’s trek through Sol 1553.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1553 Martian day, or sol, of the rover’s mission on Mars, as of December 19, 2016.
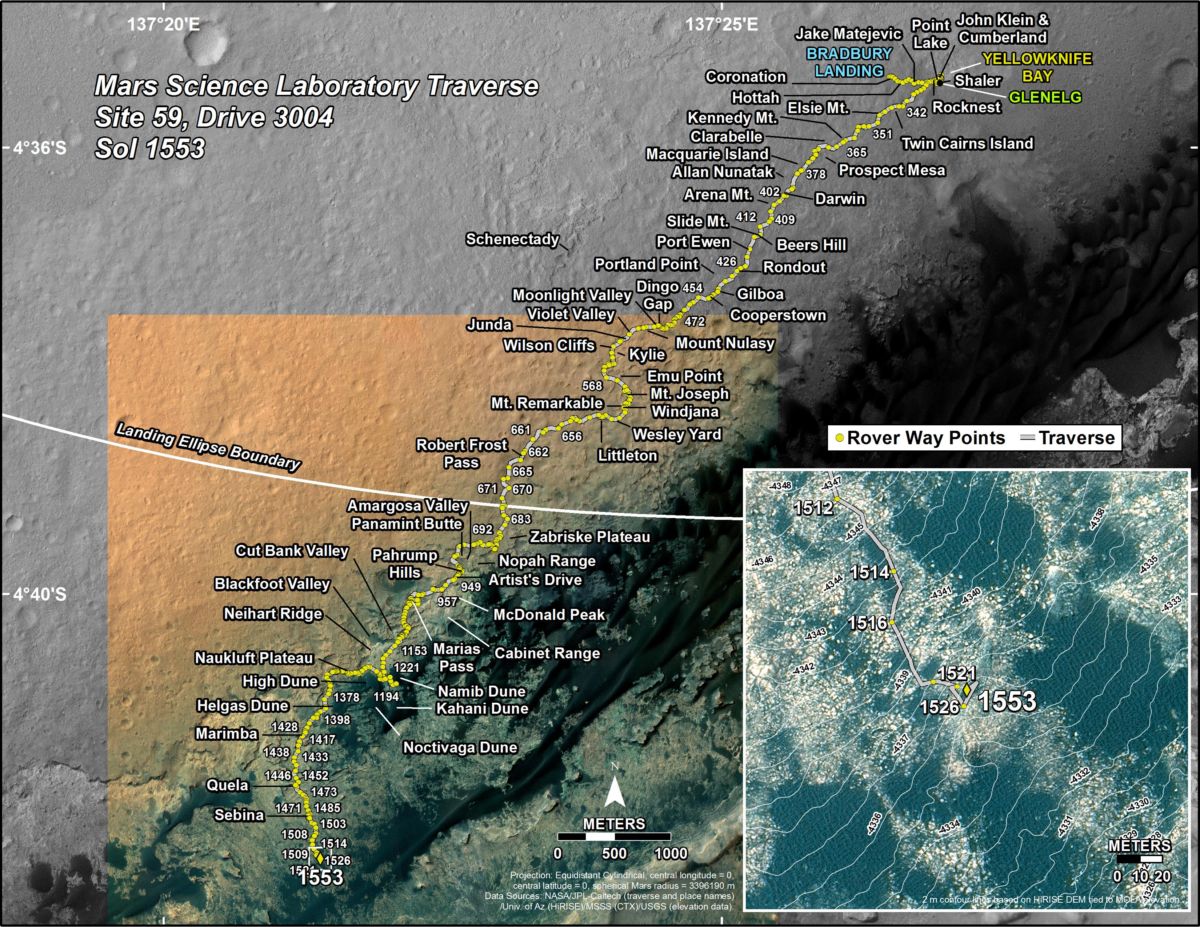
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Image credit: NASA/JPL-Caltech/Univ. of Arizona
From Sol 1526 to Sol 1553, Curiosity had driven a straight line distance of about 24.20 feet (7.38 meters), bringing the rover’s total odometry for the mission to 9.34 miles (15.03 kilometers).

Full Moon…full of lava tubes?
Credit: NASA/JPL
There is “mounting evidence” from a number of lunar probes that suggest the presence of vacant lava tubes under the surface of the Moon.
“Such large sub-lunarean structures would be of great benefit to future human exploration of the Moon, providing shelter from the harsh environment at the surface,” reports a Purdue University research team.
Indeed, some of those Moon tubes may be more than a kilometer in width.
Sub-surface stability
The team, led by David Blair of the Department of Earth, Atmospheric, and Planetary Sciences at Purdue, have reported on “The structural stability of lunar lava tubes,” reporting their findings in the scientific journal, Icarus.
Blair and his colleagues also tackled whether or not empty lava tubes of this size are stable under lunar conditions? Furthermore, what is the largest size at which they could remain structurally sound?
The Purdue team addressed these questions by creating “elasto-plastic finite element models” of lava tubes using the Abaqus modeling software and examining where there is local material failure in the tube’s roof.

The city of Philadelphia is shown inside a theoretical lunar lava tube. A Purdue University team of researchers explored whether lava tubes more than one kilometer wide could remain structurally stable on the moon.
Credit: Purdue University/courtesy of David Blair
Roof thickness
Team results show that the stability of a lava tube depends on its width, its roof thickness, and whether the rock comprising the structure begins in a lithostatic or Poisson stress state.
Taking that into account, with a roof of some seven feet (2-meters) thick, lava tubes a kilometer or more in width can remain stable, they report.
The theoretical maximum size of a lunar lava tube depends on a variety of factors, the study group says, but given sufficient burial depth of 1,640 feet (500 meters) and an initial lithostatic stress state, their results show that lava tubes up to three miles (5 kilometers) wide may be able to remain structurally stable.
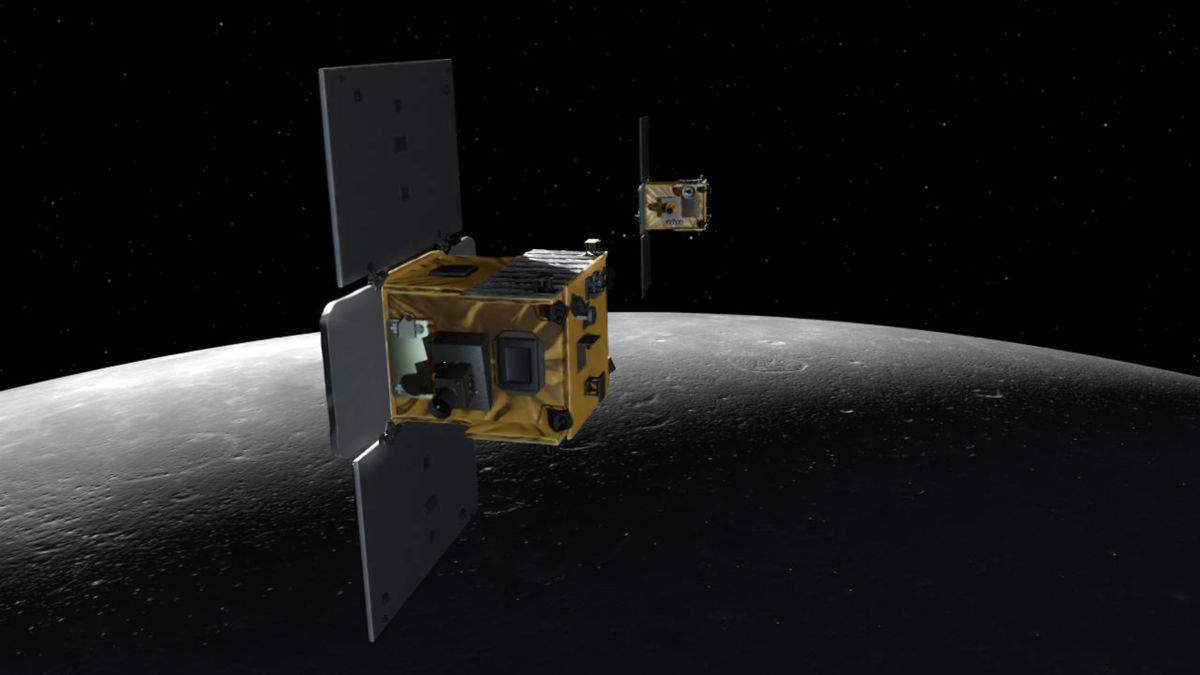
Artist concept of GRAIL mission.
The twin Gravity Recovery and Interior Laboratory (GRAIL) mission of 2012 flew spacecraft in tandem orbits around the Moon to measure its gravity field in unprecedented detail.
Credit: NASA/JPL
Multi-country probing
This research made use of Japan’s SELenological and ENgineering Explorer “KAGUYA” (SELENE), the country’s first large lunar explorer, NASA’s Lunar Reconnaissance Orbiter (LRO), and especially data gleaned by the two NASA Gravity Recovery and Interior Laboratory (GRAIL) spacecraft.
For further information, go to:
http://www.sciencedirect.com/science/article/pii/S0019103516303566
Also, check out this Inside Outer Space story on an early statement from the science team:
Tunnel Vision: Underground Cities on the Moon
https://www.leonarddavid.com/tunnel-vision-underground-cities-on-the-moon/

Orbital ATK Stargazer airplane carrying Pegasus rocket loaded with Cyclone Global Navigation Satellite System (CYGNSS) spacecraft.
Credit: Orbital ATK
Skywatcher Paul Maley captured the entire train of 8 satellites from the December 15th Cyclone Global Navigation Satellite System (CYGNSS) launch, a video showing the spacecraft passing over his house in Carefree, Arizona.

Artist’s view of Cyclone Global Navigation Satellite System (CYGNSS).
Credit: NASA
The spacecraft bus precedes this entourage by 2 minutes. The 8 CYGNSS satellites can be viewed over a 2 minute interval (altitude 328 miles) on December 18 at 12:47-12:50UT.
For video, go to:
http://www.asteroidoccultation.com/observations/NA/MaleyCYGNSS.mp4
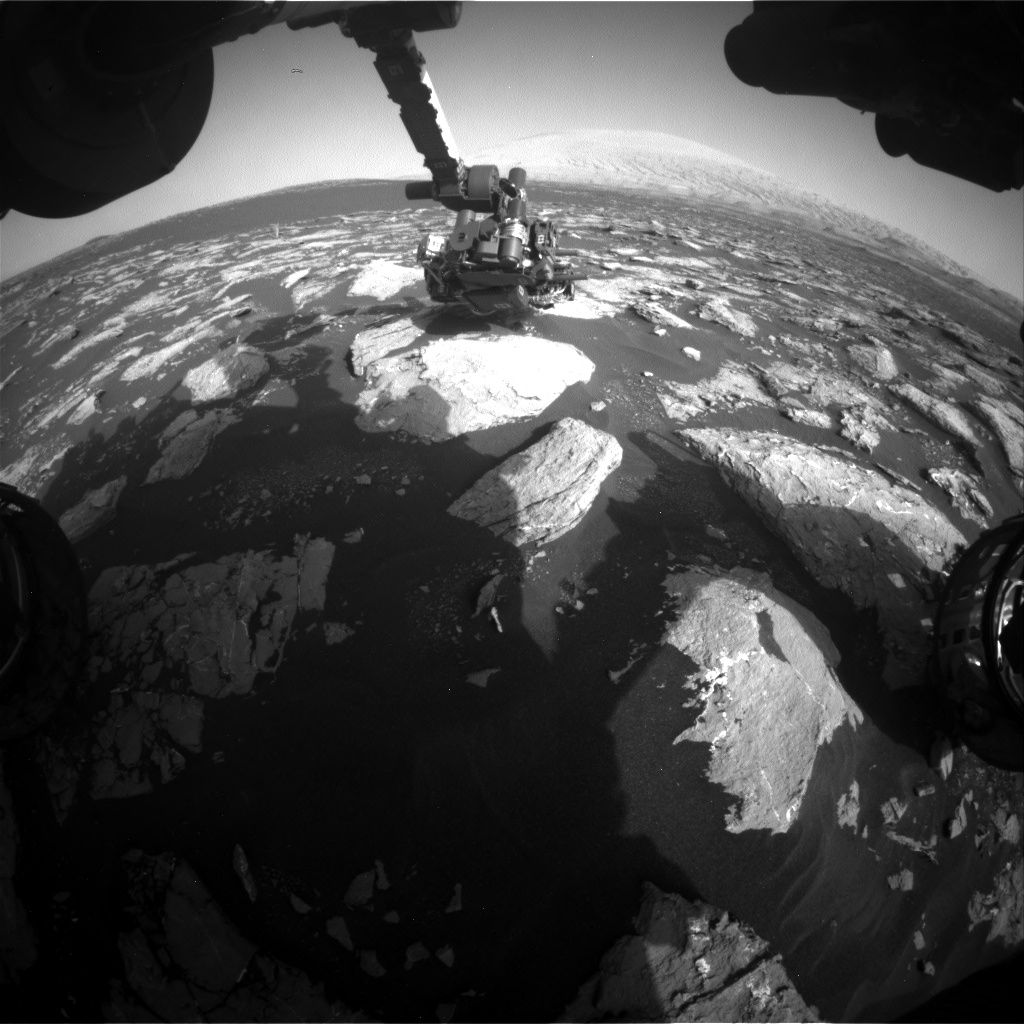
Curiosity Front Hazcam Right B image taken on Sol 1552, December 17, 2016.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on the Red Planet is now in Sol 1553, with the robot’s engineering team still at work diagnosing drill issues.
“But in the meantime we are still getting good science done,” adds Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona.
Target shooting
A Sol 1552 plan was scripted, starting off with Chemistry and Camera (ChemCam) observations of the targets “Hall Quarry” and “Long Porcupine.”

Curiosity Navcam Left B image taken on Sol 1552, December 17, 2016.
Credit: NASA/JPL-Caltech
The robot’s Mastcam is slated to document those targets and then do a multispectral observation of “Western Head,” Anderson says.
The rover’s Mastcam is also to image the rover deck and Curiosity’s Navcam is slated to watch for dust devils.
Drive on tap
“There will also be some drill diagnostics on Sol 1552,” Anderson points out. “After sitting in the same spot for so long, it will be nice on Sol 1553 when we retract the arm and drive to an interesting area about 10 meters [33 feet] away.”

Curiosity Mastcam Right image taken on Sol 1550, December 15, 2016.
Credit: NASA/JPL-Caltech/MSSS
After the drive the plan calls for post-drive imaging and a taking a Mars Descent Imager (MARDI) image of the ground under the rover.
Sol 1554 is an untargeted sol, with Navcam and Mastcam atmospheric observations, Anderson concludes.
As always, dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.

