Author Archive

A future Mars protected from the direct solar
wind should come to a new equilibrium allowing an extensive atmosphere to support liquid water on its surface.
Credit: J.L.Green, et al.

Credit for background image: Michael Carroll
What are the prospects for altering the environment of Mars more to our liking?
Can the Red Planet be terraformed was recently spotlighted during last week’s Lunar and Planetary Science Conference (LPSC) held at The Woodlands, Texas.
Terraforming serves up a variety of meanings, be it raising the pressure and temperature enough to allow intermittent liquid water and possible plant growth, to increasing the pressure and temperature so that humans could work directly on the Mars surface, requiring only breathing apparatus to provide oxygen
Two phase approach
A “terraforming timeline” has been outlined by Aaron Berliner at the University of California Berkeley, Berkeley, and Chris McKay of the NASA Ames Research Center, Mountain View, California.
In their LPSC poster paper, they explain that terraforming Mars can be divided into two phases:
- Warming the planet from the present average surface temperature of -60ºC to a value close to Earth’s average temperature to +15ºC, and recreating a thick carbon dioxide (CO2) atmosphere. This warming phase is relatively easy and quick, and could take roughly 100 years.
- The second phase is producing levels of oxygen in the atmosphere that would allow humans and other large mammals to breathe normally. This oxygenation phase is relatively difficult and would take 100,000 years or more, unless one postulates a technological breakthrough.
Wanted: roadmap
The researchers propose, in part, that given the long-term timeline of a possible terraforming endeavor, there’s need to develop a roadmap that outlines the technological processes and advancements required to terraform the Red Planet.
That roadmap would involve adaptation of current and future robotic Martian missions for measuring specific elemental and mineral samples such that a geolocated Martian resource database can be constructed. Also there’s need for mathematical modeling of Martian terraforming to calculate costs for a specific set of terraform-related reactions.

Scene from “Mars,” a National Geographic Channel miniseries.
Credit: National Geographic, Imagine, RadicalMedia, Robert Viglasky
Start now
In addition, Berliner and McKay see a focused synthetic biology initiative for engineering organisms for Martian in-situ resource utilization. In addition they advise development of localized para-terraforming systems for evaluating processes in a controlled area on Martian surface and subsurface via probes.
Furthermore, the researchers envision a planetary protection agreement describing restrictions of terraforming processes “such that Mars can be maintained for future studies and terraforming can be explored beyond experimental and computational means.”
The Mars specialists report that such a roadmap should be started now, as it will require the input from many communities within space sciences, astrobiology, geosciences, and biological sciences.
CO2 deliverables
According to Bruce Jakosky of the Laboratory for Atmospheric and Space Physics at the University of Colorado, Boulder, the terraforming of Mars in the near term is not feasible.

Artist concept of NASA’s Mars Atmosphere and Volatile Evolution (MAVEN) mission.
Credit: NASA/Goddard Space Flight Center
Terraforming Mars would involve putting enough carbon dioxide back into the atmosphere to provide substantial greenhouse warming.
“Is enough CO2 available to do this? No,” explains Jakosky who is also the scientific leader of NASA’s now orbiting Mars Atmosphere and Volatile Evolution (MAVEN) mission that is busily studying the Martian atmosphere.
“It is not feasible today, using existing technology or concepts, to carry out any activities that significantly increase the atmospheric CO2 pressure and/or provide any significant warming of the planet,” he explains in a poster paper presented at the LPSC last week.
Extremely limited
Jakosky and his co-author, Christopher Edwards of Northern Arizona University in Flagstaff, Arizona, conclude that the ability to release enough CO2 into the Mars atmosphere to provide any significant greenhouse warming is “extremely limited.”
This is the case even if most of the CO2 present on early Mars still remained on the planet, locked up in adsorbed gas and carbonates. Greenhouse warming is further limited in the likely event that the bulk of the early CO2 has been lost to space, as suggested by recent measurements.
While greenhouse warming is still conceivable by large-scale manufacturing of chlorofluorocarbons, as some researchers have suggested, this approach “is very far into the future at best.”
To view the full abstracts and more information presented in the two papers, go to:
The Terraforming Timeline
http://www.lpi.usra.edu/meetings/lpsc2017/pdf/1032.pdf
Can Mars Be Terrraformed?
http://www.lpi.usra.edu/meetings/lpsc2017/pdf/1193.pdf

Artist’s impression of the ExoMars 2020 rover and Russia’s stationary surface platform in background.
Credit:
ESA/ATG medialab
(Update: March 28, 2017)
Two ancient sites on Mars that hosted an abundance of water in the planet’s early history have been recommended as the final candidates for the landing site of the 2020 ExoMars rover and surface science platform: Oxia Planum and Mawrth Vallis.
The process to decide where Europe’s ExoMars rover will scout about on the Red Planet is underway this week.
In late 2015, one site – Oxia Planum – had been recommended as the primary focus for further detailed evaluation, with two other sites retained for discussion. Now experts will determine whether it will be Aram Dorsum or Mawrth Vallis that will also be put forward to study in further detail.
Landing sites
Aram Dorsum comes with a channel, curving from northeast to west across the location. The sedimentary rocks around the channel are thought to be alluvial sediments deposited much like those around Earth’s River Nile.
Mawrth Vallis is one of the oldest outflow channels on Mars, at least 3.8 billion years old. It hosts large exposures of finely layered clay-rich rocks, indicating that water once played a role here.
Oxia Planum contains one of the largest exposures of ancient – approximately 3.8 billion years old – clay-rich rocks on the planet. The finely layered formations record a variety of deposition and wetting environments believed to be similar to that of Mawrth Vallis.

Credit: ESA/ATG medialab
ESA/Russia
The European Space Agency’s (ESA) ExoMars rover and Russia’s stationary surface science platform are scheduled for launch in July 2020, arriving at Mars in March 2021.
A key objective of ExoMars is establishing whether life ever existed on Mars. Therefore the chosen site should be ancient – around 3.9 billion years old – with abundant evidence of water having been present for extended periods.
Drill depth
ESA’s rover is factory equipped with a drill that is capable of extracting samples from depths of over 6 feet (2 meters).
According to an ESA statement regarding drill depth, “this is crucial, because the present surface of Mars is a hostile place for living organisms owing to the harsh solar and cosmic radiation. By searching underground, the rover has more chance of finding preserved evidence.”
Drill samples are to be delivered to the Analytical Laboratory Drawer (ALD) in the body of the rover, via a sample delivery window.
ESA’s Trace Gas Orbiter, now in Mars orbit since October 2016, will serve as a relay station for the ExoMars rover mission, as it continues to press on with its own science agenda.
For an informative overview of the ESA Mars rover, go to:
http://exploration.esa.int/jump.cfm?oid=58857

A United Launch Alliance (ULA) Atlas V rocket successfully launched the U.S. Air Force X-37B space plane on May 20, 2015.
Credit: ULA
The hush-hush mission by the U.S. Air Force’s X-37B space plane has sailed past a previous program record for time in orbit.
Launched atop an Atlas booster on May 20, 2015, the OTV-4 (Orbital Test Vehicle-4) has winged past 674 days – a long-duration flight milestone for the program reached back in October 2014.

The first X-37B Orbital Test Vehicle waits in the encapsulation cell of the Evolved Expendable Launch vehicle on April 5, 2010 at the Astrotech facility in Titusville, Fla. Half of the Atlas V five-meter fairing is visible in the background.
Credit: U.S. Air Force
The robotic mini-space plane now in orbit is one of two reusable X-37B vehicles that constitute the space plane “fleet.” Also, this current OTV-4 space trek is the second flight of the second X-37B vehicle built for the Air Force by Boeing.
Space drone
Appearing like a miniature version of NASA’s now-retired space shuttle orbiter, the reusable military space plane is 29 feet (8.8 meters) long and 9.6 feet (2.9 meters) tall, and has a wingspan of nearly 15 feet (4.6 meters).
The space drone has a payload bay about the size of a pickup truck bed that can be outfitted with a robotic arm. It has a launch weight of 11,000 pounds (4,990 kilograms) and is powered on orbit gallium arsenide solar cells with lithium-ion batteries.

A third mission of the Boeing-built X-37B Orbital Test Vehicle was completed on Oct. 17, 2014, when it landed and was recovered at Vandenberg Air Force Base in California following a successful 674-day space mission. The upcoming space plane flight – on the program’s fourth mission — may land at the Kennedy Space Center in Florida.
Credit: Boeing
Track record
What this “winged warrior” is doing high above Earth is an on-going, tight-lipped affair.
Some payloads onboard the OTV-4 craft have been previously identified.
For example, Aerojet Rocketdyne has said that its XR-5A Hall Thruster had completed initial on-orbit validation testing onboard the X-37B space plane. Also onboard is a NASA advanced materials investigation.
The first OTV mission began April 22, 2010, and concluded on Dec. 3, 2010, after 224 days in orbit.
The second OTV mission began March 5, 2011, and concluded on June 16, 2012, after 468 days on orbit.
An OTV-3 mission chalked up nearly 675 days in orbit when it landed Oct. 17, 2014.

Recovery crew members process the X-37B Orbital Test Vehicle at Vandenberg Air Force Base after the program’s third mission complete.
Credit: Boeing
Land ho?
There’s no telling how long the now-orbiting space plane will continue to fly. All the OTV craft to date have guided their way on auto-pilot to a Vandenberg Air Force Base, California tarmac-touchdown.
But that could change with the OTV-4 mission.
What is known is that progress has been made on consolidating X-37B space plane operations, including use of NASA’s Kennedy Space Center (KSC) in Florida as a landing site for the robotic space plane.
A former KSC space-shuttle facility known as Orbiter Processing Facility (OPF-1) was converted into a structure that will enable the Air Force “to efficiently land, recover, refurbish and relaunch the X-37B Orbital Test Vehicle (OTV),” according to Boeing.

Former shuttle processing area at the Kennedy Space Center has been overhauled by Boeing to prep the military’s secretive X-37B space plane.
Credit: Malcolm Glenn
Rapid capabilities
The X-37B vehicle development falls under the Boeing Space and Intelligence Systems in El Segundo, California, the firm’s center for all space and experimental systems and government and commercial satellites.
The Air Force Rapid Capabilities Office is leading the Department of Defense’s OTV initiative, by direction of the Under Secretary of Defense for Acquisition, Technology and Logistics and the Secretary of the Air Force.
What’s up?
“The Air Force continues to push the envelope of what the X37B can do, likely toward determining operational mission capabilities in the future,” explains Joan Johnson-Freese, Professor in the Department of National Security Affairs at the Naval War College. “It remains unclear what capabilities the spacecraft will add to those already available, other than duration in orbit,” she told Inside Outer Space.
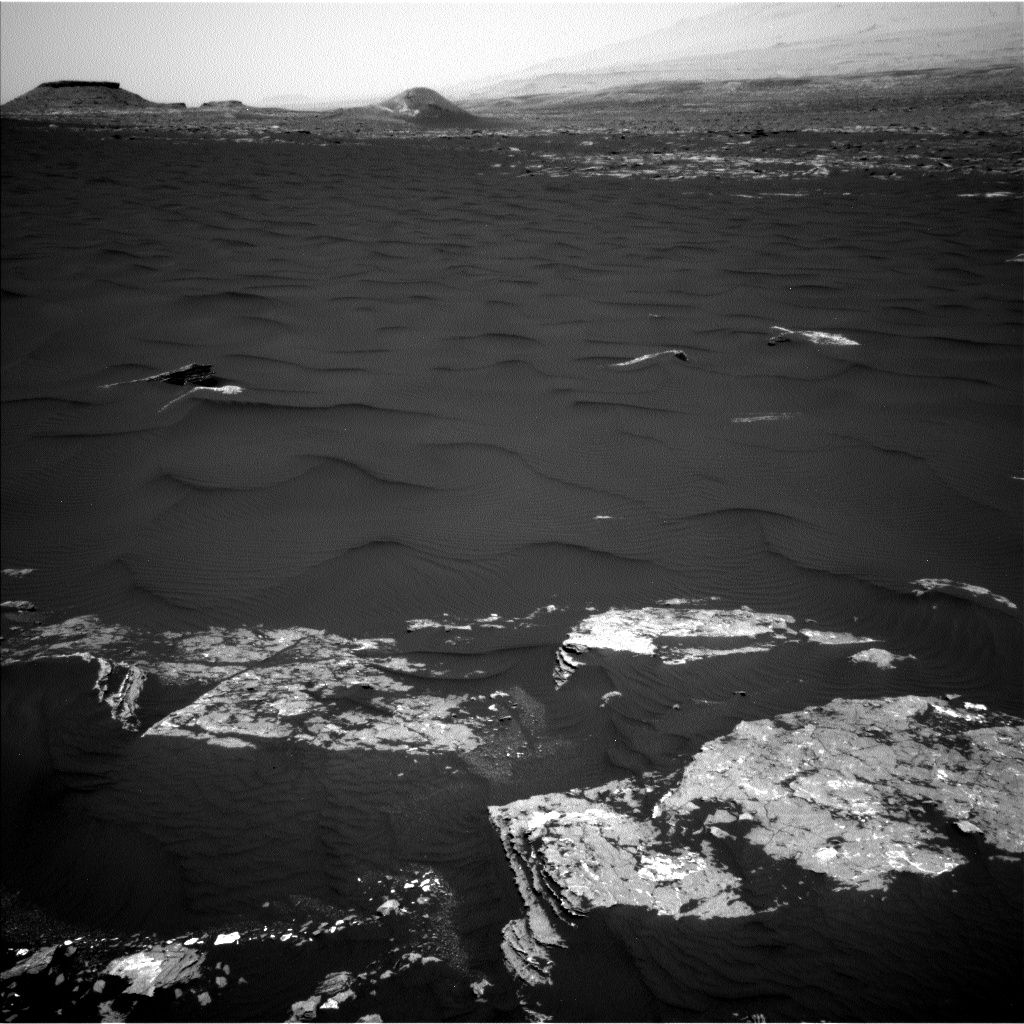
Curiosity Navcam Left B image taken on Sol 1646, March 24, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is busy at work on Sol 1647 after a drive of over 98 feet (30 meters) on Sol 1646.
Over this weekend, the robot is assigned remote sensing and arm work, along with a drive onto the edge of a large dune.
Left middle wheel
A recent traction control test involving Curiosity’s wheels went well, reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona.

Two of the raised treads, called grousers, on the left middle wheel of NASA’s Curiosity Mars rover broke during the first quarter of 2017, including the one seen partially detached at the top of the wheel in this image from the Mars Hand Lens Imager (MAHLI) camera on the rover’s arm.
Credit: NASA/JPL-Caltech/MSSS
Traction control comes none too soon as a routine check of the aluminum wheels on the rover has found two small breaks on the Mars machinery’s left middle wheel.
According to experts at the Jet Propulsion Laboratory, builder of Curiosity, new imagery shows signs of worrisome wheel wear and tear.
Grouser grousing
The mission’s first and second breaks in raised treads — called grousers — appeared in a March 19 image check of the wheels, documenting that these breaks occurred after the last check on January 27. The grousers bear much of the rover’s weight and provide most of the traction and ability to traverse over uneven terrain.

Curiosity Mars Hand Lens Imager (MAHLI) image taken on March 19, 2017, Sol 1641.
Credit: NASA/JPL-Caltech/MSSS
“All six wheels have more than enough working lifespan remaining to get the vehicle to all destinations planned for the mission,” said Curiosity Project Manager Jim Erickson at JPL. “While not unexpected, this damage is the first sign that the left middle wheel is nearing a wheel-wear milestone,” he said in a statement.
Testing has shown that at the point when three grousers on a wheel have broken, that wheel has reached about 60 percent of its useful life.
Curiosity Mars Hand Lens Imager (MAHLI) image taken on March 22, 2017, Sol 1644.
Credit: NASA/JPL-Caltech/MSSS
Beach setting
Meanwhile, on Sol 1647, the plan calls for the robot’s Left Mastcam to take a 360-degree panorama and Right Mastcam will acquire a 17×3 mosaic of the edge of the sand dune, which is named “Ogunquit Beach.”
Then the Chemistry & Camera (ChemCam ) and Right Mastcam will observe bedrock targets “Damariscotta Lake,” “Mount Katahdin,” and “Boothbay Harbor.”
Later in the day, the rover’s robotic arm will be unstowed for drill diagnostic tests and a full suite of Mars Hand Lens Imager (MAHLI) images on another bedrock target dubbed “Halftide Ledge.”

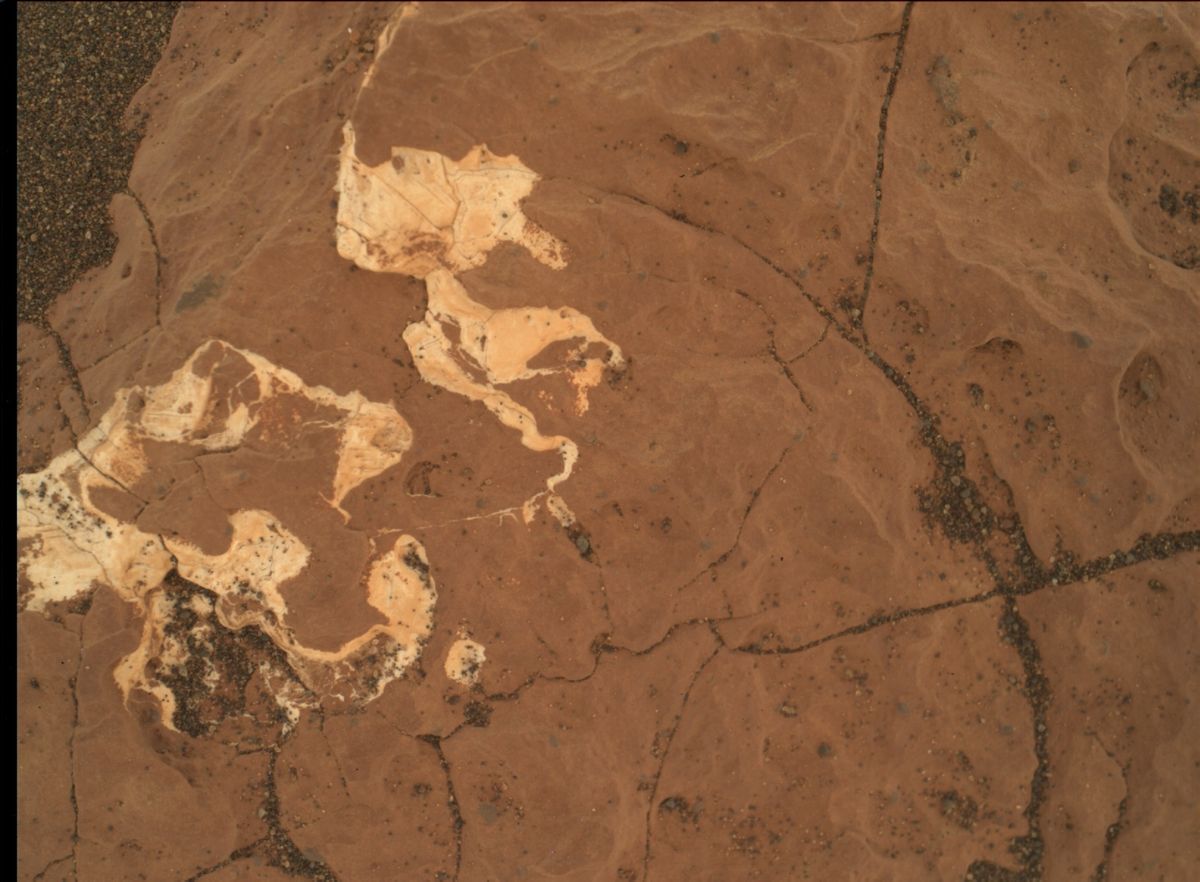
Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1646, March 24, 2017.
Credit: NASA/JPL-Caltech/LANL
Then the Alpha Particle X-Ray Spectrometer (APXS) is slated to be placed on the same target for an overnight integration.
Drive onto the dune
On Sol 1648, the schedule calls for the arm to be stowed after more drill diagnostic tests and Curiosity’s Navcam will search for dust devils while the Rover Environmental Monitoring Station (REMS) acquires environmental data.
According to Herkenhoff, the wheeled robot is set to drive onto the dune. “After the drive, the arm will be unstowed to allow Mastcam and Navcam to acquire stereo images of the arm workspace to support planning next week.”

Curiosity’s traverse map through Sol 1646 – as of March 24, 2017.
From Sol 1645 to Sol 1646, Curiosity has driven a straight line distance of about 97.95 feet (29.86 meters), bringing the rover’s total odometry for the mission to 9.89 miles (15.91 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL-CalTech/University of Arizona
Early the next morning, Mastcam is set to measure the dust in the atmosphere and Navcam will search for clouds. In the afternoon, Right Mastcam will repeatedly take pictures of three areas near the rover to look for changes due to winds.
In addition, Mastcam will search for dust devils and measure atmospheric dust at two different times of day.
“Finally, the rover will sleep through the night to recharge in preparation for what will likely be a busy week,” Herkenhoff concludes.

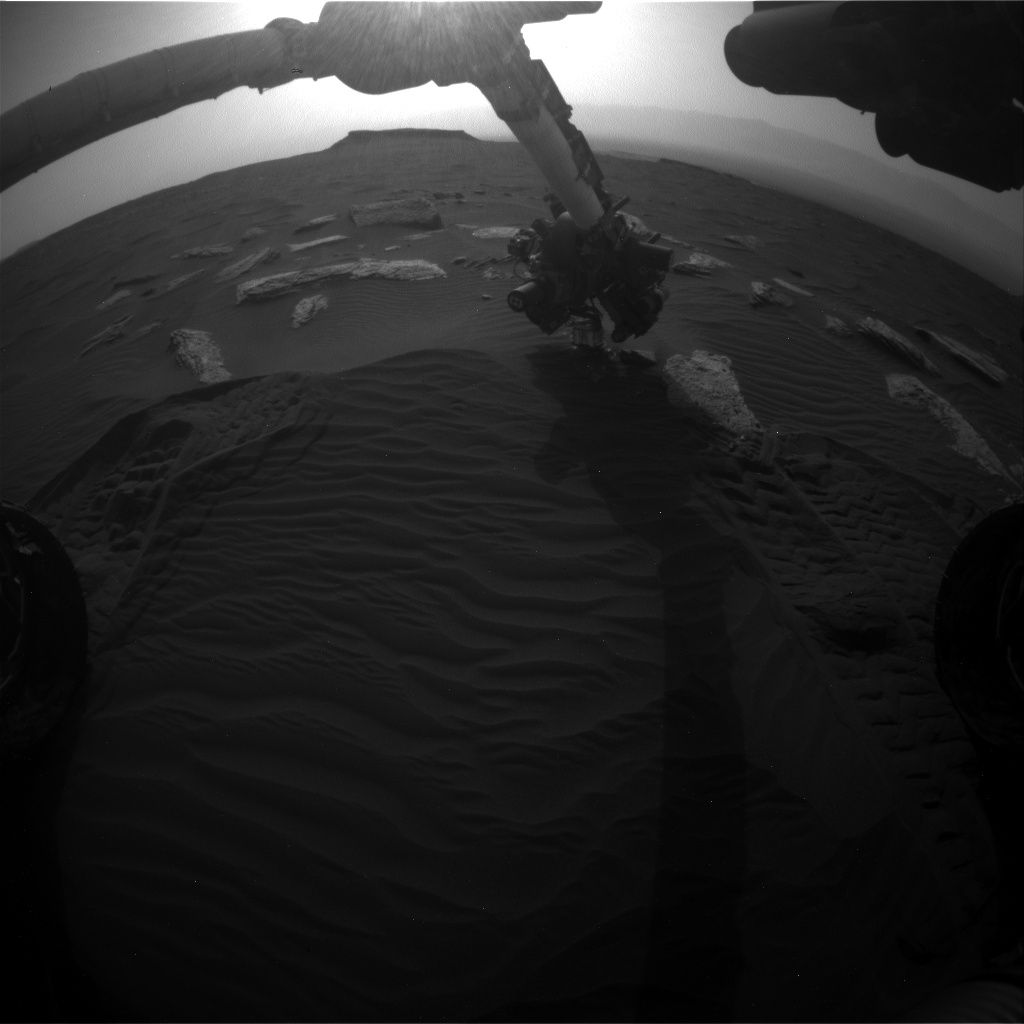
Curiosity Front Hazcam Right B image taken on Sol 1645, March 23, 2017.
Credit: NASA/JPL-Caltech
The Curiosity Mars rover is now in Sol 1646, following a drive of roughly 65 feet (20 meters) the previous sol.
Curiosity has wheeled toward the big sand dune to the east that is the subject of a science campaign that will possibly start next week.
Traction control
“Another drive toward the east is planned for Sol 1646, with post-drive imaging to set up for contact science,” reports Ken Herkenhoff of the USGS Astrogeology Science Center in Flagstaff, Arizona. “The drive will include the first use on Mars of traction control software that’s been tested and fine-tuned in JPL’s Mars Yard since last April.”

Curiosity Navcam Left B image taken on Sol 1645, March 23, 2017.
Credit: NASA/JPL-Caltech
Herkenhoff adds that this new software allows the rover to drive “softer,” meaning that when the rover detects that a wheel is driving over a rock, it slows the other five wheels to avoid pushing the wheel into the rock while the wheel climbs over the rock.
“Curiosity’s first use of traction control has been planned for months to begin about now,” Herkenhoff notes, “and is intended to validate the new software for optional use in future drives.”

Curiosity Mastcam Right image taken on Sol 1643, March 21, 2017.
Credit: NASA/JPL-Caltech/MSSS
Layered outcrops
Before the planned Sol 1646 drive, the rover’s Chemistry & Camera (ChemCam) will observe targets “Bald Rock Ledge” and “Porcupine Dry Ledge” on one of the layered outcrops to the right of the rover.
Then the robot’s Right Mastcam is slated to acquire mosaics of layered outcrops. After the drive, Navcam is slated to again search for dust devils and ChemCam will observe a target selected by Autonomous Exploration for Gathering Increased Science, or AEGIS software.
Lastly, Curiosity’s Navcam will search for clouds and Sample Analysis at Mars (SAM) Instrument Suite to perform an engineering baseline test.

Curiosity rover’s location for Sol 1645.
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Image Credit: NASA/JPL-Caltech/University of Arizona
Road map
Meanwhile, a map depicting the Curiosity rover’s location for Sol 1645 shows the route driven by the robot through the 1645 Martian day, or sol as of March 23, 2017.
Numbering of the dots along the line indicate the sol number of each drive. North is up.
From Sol 1643 to Sol 1645, Curiosity had driven a straight line distance of about 67.68 feet (20.63 meters).
Since touching down in Bradbury Landing in August 2012, the NASA rover has driven 9.87 miles (15.88 kilometers).

International Space Station.
Credit: NASA
It is the policy of the United States to support full and complete utilization of the International Space Station (ISS) through at least 2024.
But what happens to the ISS after that date? It’s an open question.
A recent hearing examined the range of choices facing America and the impacts of various options.
The hearing was held March 22 by the U.S. House of Representatives’ Subcommittee on Space of the Committee on Science, Space, and Technology titled:“The International Space Station After 2024: Options and and Impacts.”

Credit: NASA
Testimony
For the prepared testimony of the witnesses:
- William Gerstenmaier, Associate Administrator for Human Exploration and Operations, NASA
- Mary Lynne Dittmar, Executive Director, Coalition for Deep Space Exploration
- Eric Stallmer, President, Commercial Spaceflight Federation
- Robert Ferl, Distinguished Professor and Director of the Interdisciplinary Center for Biotechnology Research, University of Florida
To view the entire hearing, go to:

The MarsSuit Project is underway at UC Berkeley, led by professor Lawrence Kuznetz (right).
Credit: Lawrence Kuznetz
Being “well-suited” for Mars requires tackling an array of challenges to make a fashion statement. Thanks to university-based teamwork a novel approach has been taken to blueprint exploration attire for the Red Planet.
A collaboratory to design a spacesuit for Mars has been put in place at the University of California-Berkeley – a multidisciplinary, multi-university talent pool that includes NASA/industry partnerships.
Helmet to torso

What will a Mars spacesuit look like in the future? To maximize an explorer’s productivity on the Red Planet, different types of suits are needed from those used by Apollo moonwalkers, experts said.
Credit: NASA
The objective is to create a blue collar spacesuit, a top-to-bottom — helmet to torso – appraisal of protective clothing that allows expeditionary crews to more effectively work on Mars.
For more details, please go to my new Space.com story:
Mars Spacesuits: Designing a Blue-Collar Suit for the Red Planet
http://www.space.com/36172-mars-spacesuit-design-class.html
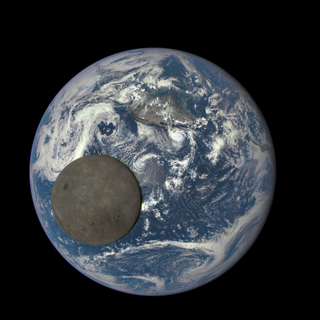
Moon’s far side captured by NOAA’s Deep Space Climate Observatory (DSCOVR).
Credits: NASA/NOAA
Saudi Arabia will contribute to China’s Chang’e-4 mission to the far side of the Moon.
That’s the word from the SpaceWatch Middle East news site.
As part of a recent six week-long tour of Asian countries, King Salman bin Abdulaziz Al Saud of Saudi Arabia has struck a deal between his Kingdom and China.
Moon MoU
The Memorandum of Understanding (MoU) between the King Abdulaziz City of Science and Technology (KACST) and the China National Space Administration (CNSA) for Saudi Arabia sets in motion collaboration and participation in the Chinese-led Chang’e-4 Moon mission, scheduled to be launched in 2018.

China’s Yutu lunar rover took this image of Change’3 lander. New lunar landers are being readied for China’s next step in Moon exploration – including a mission to the Moon’s far side.
Credit: NAOC/Chinese Academy of Sciences
The Chang’e-4 mission will consist of a Moon lander and rover, and will touch down on the far side the Moon, potentially near the Aitken Basin. That mission will also use a communications relay satellite to be placed at the Earth-Moon L2 position, a Lagrange Points between the Earth and Moon.
Private investments
Chang’e-4 is also the first Chinese space mission that uses private investments from individuals and organizations in order to accelerate the development and completion of the mission, as well as establishing ties between the Chinese government and the private sector.
SpaceWatch Middle East adds that, “at the time of reporting it is not known whether KACST is one of these private investors in Chang’e-4, or whether Saudi involvement will be technical and scientific in nature.”

China’s robotic circumlunar test flight snapped this image of the Moon with Earth in the distance.
Credit: Chinese Academy of Sciences
The Chang’e-4 agreement between Saudi Arabia and China, SpaceWatch Middle East reports, “also broadens the number of major space powers seeking to cooperate with Middle East countries in space. Countries such as Saudi Arabia, the United Arab Emirates, Iran, Israel, and Turkey are cooperating in one form or another with the space agencies and satellite companies from China, Europe, India, Japan, Russia, South Korea, and the United States.
Curiosity Front Hazcam Right B image taken on Sol 1638, March 16, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now in Sol 1639, continuing its dune campaign.
The robot has been at Stop 3, surveying “Southern Cove” for a couple of sols, prior to wheeling to another locale.

Curiosity Mars Hand Lens Imager (MAHLI) photo shows laser shots in sand from the rover’s Chemistry and Camera (ChemCam) instrument. MAHLI is located on the turret at the end of the rover’s robotic arm. Image acquired on Sol 1637, March 15, 2017.
Credit: NASA/JPL-Caltech/MSSS
Drill diagnostics continuing
Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center in Flagstaff, Arizona reports the plan for Sol 1639 has the rover retracting its robotic arm and performing drill diagnostics before taking Mars Hand Lens Imager (MAHLI) photos of targets “Greenvale Cove” and “Holmes Hole.”
Curiosity Navcam Left B image taken on Sol 1639, March 17, 2017, showing the rover’s drilling equipment.
Credit: NASA/JPL-Caltech
“After that, we have a remote sensing science block with a Navcam movie to watch for clouds above the crater rim,” Anderson adds, followed by a Mastcam change detection observation of Holmes Hole and a ChemCam observation of the disturbed sand at Greenvale Cove.
Drill feed update
Inside Outer Space was provided a statement concerning the ongoing drill diagnostics issue and an update about the drill-feed mechanism.
Mars Science Laboratory Project Manager, Jim Erickson, said: “The project has done enough diagnostics to understand possibilities for why the brake does not release consistently. There is increased friction during one part of the motor-brake system rotation. This narrows the range of possible causes.”
“Now we are characterizing what it will take to make the drill feed reliable throughout a typical drilling activity. We expect to be able to solve this, but it will take some additional time,” Erickson added.

Curiosity Navcam Left B image taken on Sol 1639, March 17, 2017.
Credit: NASA/JPL-Caltech
Onward to stop 4
Curiosity’s Mastcam is slated to also document Greenvale Cove. After the remote sensing is done, the Mars machinery is set to drive toward Stop 4 — dubbed “Ogunquit Beach” — and collect post-drive images.
As always, planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
 A look at U.S. President Trump’s Budget for NASA has been issued: America First: A Budget Blueprint To Make America Great Again.
A look at U.S. President Trump’s Budget for NASA has been issued: America First: A Budget Blueprint To Make America Great Again.
The Budget increases cooperation with industry through the use of public-private partnerships, focuses the Nation’s efforts on deep space exploration rather than Earth-centric research, and develops technologies that would help achieve U.S. space goals and benefit the economy.

Credit: GPO
The President’s 2018 Budget requests $19.1 billion for NASA, a 0.8 percent decrease from the 2017 annualized Continuing Resolution (CR) level, with targeted increases consistent with the President’s priorities.
Snapshot looks
• Supports and expands public-private partnerships as the foundation of future U.S. civilian space efforts. The Budget creates new opportunities for collaboration with industry on space station operations, supports public-private partnerships for deep-space habitation and exploration systems, funds data buys from companies operating small satellite constellations, and supports work with industry to develop and commercialize new space technologies.
• Paves the way for eventual over-land commercial supersonic flights and safer, more efficient air travel with a strong program of aeronautics research. The Budget provides $624 million for aeronautics research and development.

Credit: ESA – P.Carril
• Reinvigorates robotic exploration of the Solar System by providing $1.9 billion for the Planetary Science program, including funding for a mission to repeatedly fly by Jupiter’s icy ocean moon Europa and a Mars rover that would launch in 2020. To preserve the balance of NASA’s science portfolio and maintain flexibility to conduct missions that were determined to be more important by the science community, the Budget provides no funding for a multi-billion-dollar mission to land on Europa. The Budget also supports initiatives that use smaller, less expensive satellites to advance science in a cost-effective manner.
• Provides $3.7 billion for continued development of the Orion crew vehicle, Space Launch System, and associated ground system, to send American astronauts on deep-space missions. To accommodate increasing development costs, the Budget cancels the multi-billion-dollar Asteroid Redirect Mission. NASA will investigate approaches for reducing the costs of exploration missions to enable a more expansive exploration program.
Credit: NOAA/NASA/USAF
• Provides $1.8 billion for a focused, balanced Earth science portfolio that supports the priorities of the science and applications communities, a savings of $102 million from the 2017 annualized CR level. The Budget terminates four Earth science missions (PACE, OCO-3, DSCOVR Earth-viewing instruments, and CLARREO Pathfinder) and reduces funding for Earth science research grants.
• Eliminates the $115 million Office of Education, resulting in a more focused education effort through NASA’s Science Mission Directorate. The Office of Education has experienced significant challenges in implementing a NASA-wide education strategy and is performing functions that are duplicative of other parts of the agency.
• Restructures a duplicative robotic satellite refueling demonstration mission to reduce its cost and better position it to support a nascent commercial satellite servicing industry, resulting in a savings of $88 million from the 2017 annualized CR level.
• Strengthens NASA’s cybersecurity capabilities, safeguarding critical systems and data.
NASA statement
In a statement from NASA acting Administrator Robert Lightfoot on the Fiscal Year 2018 agency budget proposal:
“While more detailed budget information will be released in May, we have received a top line budget number for the agency as part of an overall government budget rollout of more than $19 billion. This is in line with our funding in recent years, and will enable us to effectively execute our core mission for the nation, even during these times of fiscal constraint.”
Lightfoot adds: “As with any budget, we have greater aspirations than we have means, but this blueprint provides us with considerable resources to carry out our mission, and I know we will make this nation proud.”

