Author Archive
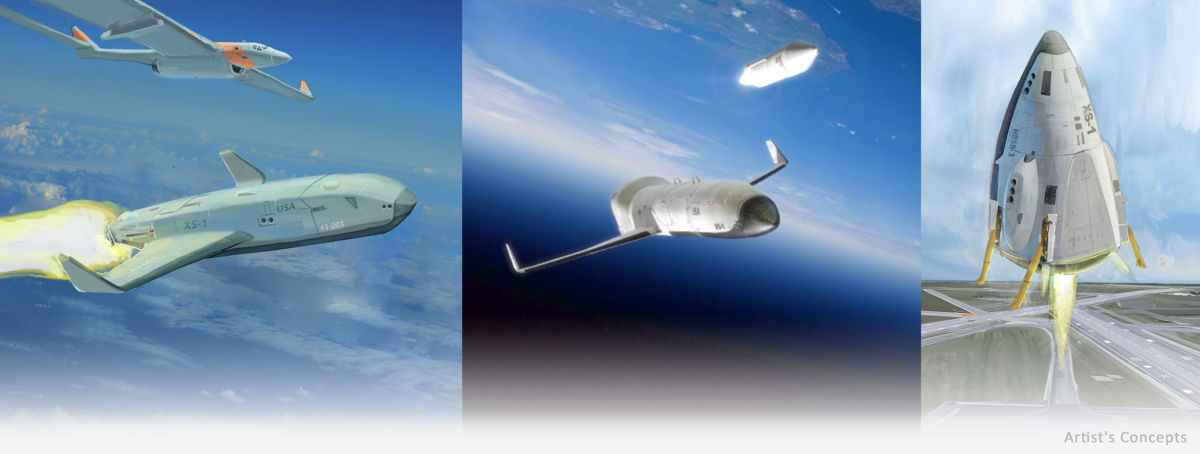
Collage of proposed DARPA XS-1 craft.
Credit: DARPA
The Defense Advanced Research Projects Agency (DARPA) may soon award a contract for the XS-1 spaceplane.
According to Air Force Magazine, DARPA has entered the final stages of a “downselect” to choose one company to proceed into the flying phase of the spaceplane.
Three companies
In Phase 1 of XS-1, DARPA awarded prime contracts to three companies, each working in concert with a commercial launch provider: The Boeing Company (working with Blue Origin, LLC); Masten Space Systems (working with XCOR Aerospace); and Northrop Grumman Corporation (working with Virgin Galactic).
However, according to the Air Force Magazine posting, the Phase II contractor won’t necessarily be chosen from the three Phase I participants.
Aircraft-like frequency
“After downselect, a critical design review would take place in 2018 and a series of flights could be made as early as 2020. One of the program requirements is to fly 10 suborbital or orbital missions in as many days, achieving space operations with ‘aircraft-like’ frequency, DARPA said. If successful, a ‘public-private partnership’ model of operating the vehicles could be adopted, DARPA documents show,” Air Force Magazine’s John Tirpak reports.
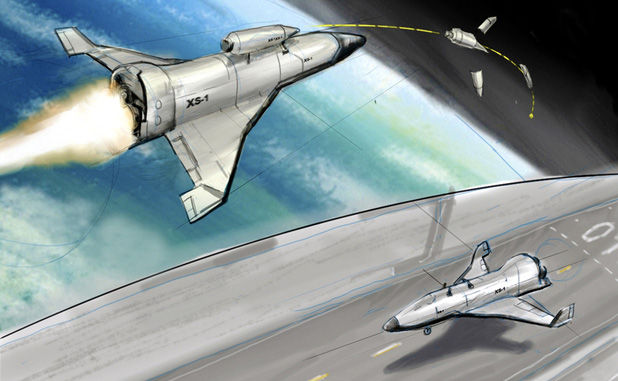
Early DARPA artwork of the XS-1.
Credit: DARPA
Technical goals
According to the DARPA website, XS-1 has four primary technical goals:
- Fly 10 times in a 10-day period (not including weather, range and emergency delays) to demonstrate aircraft-like access to space and eliminate concerns about the cost-effectiveness and reliability of reusable launch.
- Achieve flight velocity sufficiently high to enable use of a small (and therefore low-cost) expendable upper stage.
- Launch a 900- to 1,500-pound representative payload to demonstrate an immediate responsive launch capability able to support both DoD and commercial missions. The same XS-1 vehicle could eventually also launch future 3,000+- pound payloads by using a larger expendable upper stage.
- Reduce the cost of access to space for 3,000+-pound payloads, with a goal of approximately $5 million per flight for the operational system, which would include a reusable booster and expendable upper stage(s).
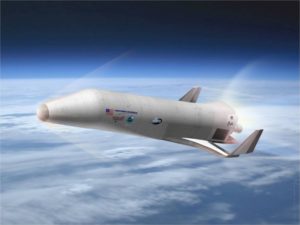
One of three firms vying for XS-1.
Credit: Northrop Grumman

Low-cost, recurring flight capability
“Structures made of advanced materials, cryogenic tanks, durable thermal protection, and modular subsystems would make possible a vehicle able to launch, fly to high speeds and then land in a condition amenable to rapid turnaround and launch with the next payload. Reusable, reliable propulsion would also be essential for a low-cost and recurring flight capability,” adds the DARPA website.

Credit: Fight for Space
Where is your space program?
In 1962, President John F. Kennedy proclaimed that NASA would send astronauts to the Moon by the end of the decade. The “space race” inspired an entire generation to pursue careers in science, technology and engineering, creating the technological boom of the 1990s.
As the balance of world power shifted, interest in space exploration declined and NASA became old news.
In-depth interviews
Fight for Space lands in theaters and on demand May 19, a striking presentation that features such stellar notables as: Neil deGrasse Tyson, Jim Lovell, Story Musgrave, Rick Tumlinson, James Muncy, Marcia S. Smith, Bill Nye, John Logsdon, Gene Kranz, and Jeff Greason.
Paul Hildebrandt is the Director, Writer, and Producer of Fight for Space.
Credit: Fight for Space

SkyMuse audio team.
Credit: Fight for Space
Fight for Space examines the past, present and future of the U.S. space program through in-depth interviews with the world’s leading experts on space travel, including astronauts Jim Lovell & Story Musgrave, astrophysicist Neil DeGrasse Tyson, engineers, space industry entrepreneurs and others.
Resources
Restored film footage from the National Archives and years of historical research take you on an exciting journey from the beginning of NASA, into the future, re-awakening our sense of wonder, discovery and desire to reach for the stars.
Following ad, go to this trailer at:
For more information on this important documentary film, go to:

Credit: James Vaughan
Explore Mars, Inc. has unleashed their new 2017 report written to advance the goal of sending humans to Mars within the next two decades.
Among a set of key recommendations:

Credit: James Vaughan
- Implement a next generation orbiter as soon as possible to prospect for resources (notably water) that will reduce the overall cost of missions to Mars while providing significant science gains. Even if use of on-the-spot Mars resourcs is not needed for the initial missions to Mars, this reconnaissance is needed to select the human landing site. Such an orbiter is also key to replace aging telecommunications infrastructure at Mars.
- Complete a round trip demo to the Martian system via a Mars Sample Return. The samples are needed not only for the revolutionary science that would be achieved but also to address significant toxicity and backward contamination concerns for human beings, including the first human explorers of Mars.
- Special emphasis should be made to inform the public that landing humans on Mars by 2033 is an achievable goal. While international and private lunar surface missions should be applauded, increased education needs to be undertaken to articulate why lunar surface operations are not the best path to Mars
The Humans To Mars Report 2017 can be viewed in its entirety at:
https://www.exploremars.org/wp-content/uploads/2017/05/H2MR_2017_Final_webv1.pdf

Curiosity Navcam Left B image taken on Sol 1693, May 11, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover on Mars is now performing Sol 1694 science duties.
Rachel Kronyak, a planetary geologist at the University of Tennessee in Knoxville, reports that two sols – 1693 and 1694 – involves the rover carrying out a suite of remote science observations before driving away and resuming its trek up Mount Sharp.
“These remote observations include a combination of atmospheric and bedrock measurements, giving us a really thorough dataset at this location,” Kronyak adds.
Passive sky scan
The robot is slated to make atmospheric observations, including a Chemistry and Camera (ChemCam) passive sky scan, a Navcam zenith movie, as well as a suprahorizon movie, and a few Mastcam images that measure atmospheric scattering.

Dark bedrock target named “Bear Island” is seen in this Curiosity Mastcam Right image acquired on Sol 1692, May 10, 2017.
Credit: NASA/JPL-Caltech/MSSS
“For our bedrock observations, we will be conducting two ChemCam rasters and a Mastcam multispectral activity on the dark bedrock target named “Bear Island,” Kronyak adds. An initial look at Bear Island showed it to be interesting enough target to warrant further investigation by ChemCam and Mastcam.
Phobos imagery
Following a set of remote science observations, the plan calls for the robot to drive away and take some post-drive images in readiness for a busy weekend of contact and remote science.
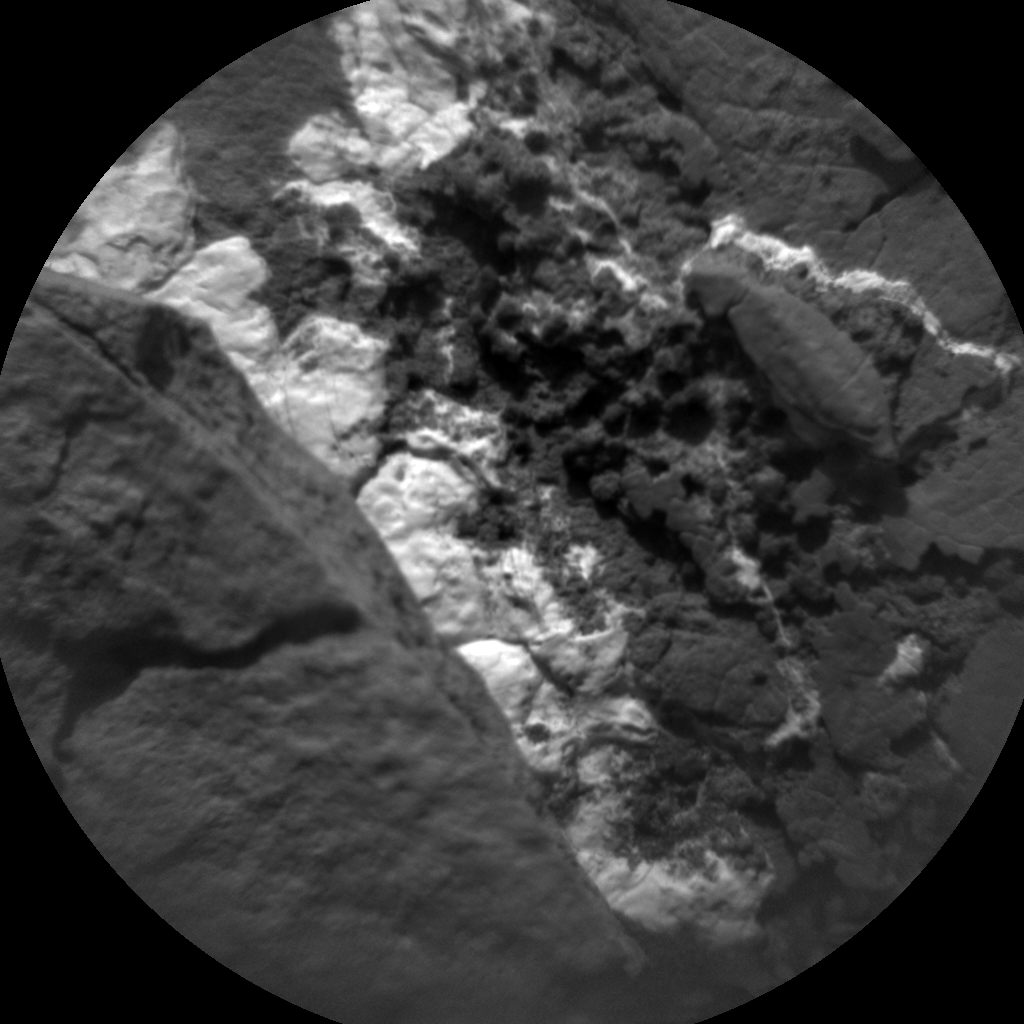
Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 1693, May 11, 2017.
Credit: NASA/JPL-Caltech/LANL
“After the drive, we will be taking our third round of Phobos transit images,” Kronyak concludes, with Mastcam as well as an automated ChemCam Autonomous Exploration for Gathering Increased Science (AEGIS) observation.
On sol 1694, the planning script calls for producing a Navcam dust devil movie and calibrate the ChemCam instrument.
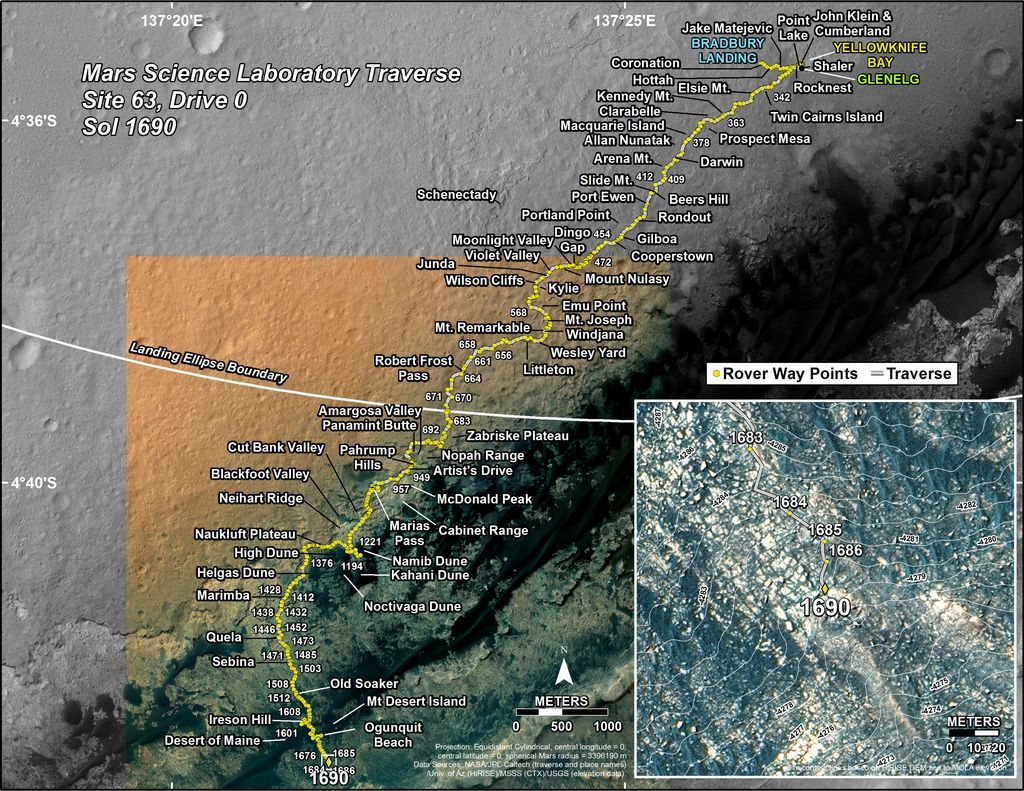
Route driven by Curiosity through the 1690 Martian day, or sol, of the rover’s mission on Mars (May 8, 2017).
Credit: NASA/JPL- Caltech/University of Arizona
New map
Meanwhile, a new map has been issued showing the route driven by Curiosity through the 1690 Martian day, or sol, of the rover’s mission on Mars (May 08, 2017).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1686 to Sol 1690, Curiosity had driven a straight line distance of about 36.31 feet (11.07 meters), bringing the rover’s total odometry for the mission to 10.14 miles (16.32 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Credit: CCTV-Plus
A Chinese crew of eight is undertaking a year-long stint in the Lunar Palace 1 laboratory, called China’s first bioregenerative life support system.
The effort is dubbed “The Lunar Palace 365 Project and involves eight postgraduate students from Beijing University of Aeronautics and Astronautics (BUAA). They will live inside the 160-square-meter, 500-cubic-meter Lunar Palace 1 capsule for the next 365 days.
Self-contained
The volunteers will be living and working inside the fully closed laboratory where they can simulate a long-duration, self-contained mission with no outside inputs, according to an interview carried by CCTV-Plus. “The project is aimed at laying the groundwork for China’s lunar surface missions in the future,” they report.

Inside look at one area of China’s Lunar Palace 1.
Credit: CMSE
Lunar Palace 1 was developed by researchers at BUAA, a shorthand version that stands for Integrative Experimental Facility for Permanent Astrobase Life-support Artificial Closed Ecosystem (PALACE) Research.
Four-level life support
According to Liu Hong, the chief designer of Lunar Palace 1 from Beihang University, the self-contained facility is more advanced than what Russia and the United States have built and utilized previously.
“Before Lunar Palace 1, Russia and the United States developed two-level bioregenerative systems which only involved plants and humans,” Liu says. “But what we have built is a four-level life-support system involving plants, animals, microorganisms and humans, which is much more stable in a fully closed condition. It is by far the first of its kind in the world,” the researcher noted in a CCTV-Plus posted interview.
Reports Beijing Daily, the eight volunteers are members of Liu’s research team.
Team rotation
The facility consists of two plant cultivation modules, and one integrated module that has a living room, a work room, a bathroom and a waste-disposal room.

China’s Lunar Palace 1 – an experimental biosphere here on Earth.
Credit: CMSE
A variety of experimental crops and vegetables will be grown for the duration of the project. Human waste will be handled within the place by a bio-fermentation process. Food residue and other byproducts will be treated by bio-techniques and used for plant cultivation.
The volunteers will carry out the experiment in rotation. Specifically, Team One will spend the first 60 days inside the capsule, after which Team Two will spend another 200 days. Lastly, Team One will spend the remaining 105 days, thus completing the 365-day research mission.
Construction on the Lunar Palace 1 capsule began in March 2013. The facility was unveiled in January 2014, and it was commissioned just prior to the first mission starting in February 2014.
The last mission involved three volunteers who spent 105 days inside the facility.

ESA’s Mars Express in orbit around the Red Planet.
Credit: ESA/AOES Medialab
A simulated overflight of the Martian North Pole reveals its permanent ice cap and Chasma Boreale. The images used to produce the video were acquired by the High Resolution Stereo Camera (HRSC), operated by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) on board the European Space Agency’s (ESA) Mars Express spacecraft.
The video shows the permanent ice cap at the Martian North Pole. It is also referred to as the summer ice cap and consists mainly of water ice.
Gigantic spiral
Mars’ north polar cap looks like a gigantic spiral of ice and snow. Dark troughs are interspersed with ice-clad hills. This simulated overflight of the North Pole reveals its permanent ice cap and large Chasma Boreale trough.
Boreale is carved into the polar cap. Its formation is still unclear.
During the six month Martian winter, an additional layer of carbon dioxide forms over the permanent water ice cap.

Mars Express image showing frost build-up near Mars north pole.
Credit: ESA/D. O’Donnell – CC BY-SA IGO
Dark troughs, in which dust and deposits carried by the wind have accumulated, alternate with white, ice-clad hills. Chasma Boreale is a particularly striking trough that can be seen halfway through the film.
Origin: unclear
The up to 100-kilometer wide and 500-kilometer long valley is carved into the north polar cap to a depth of two kilometers. Dark deposits are visible at the bottom of Chasma Boreale. These are mostly dunes of black sand that have been carried into the trough by the wind.
The origin of Chasma Boreale is still unclear: the structure could have been formed by non-uniform accumulation of ice and dust, melting processes or wind erosion.
To view this video, go to:
http://www.dlr.de/dlr/en/Portaldata/1/Resources/videos/2017/809-NorthPolarCap-movie_600.mp4

Arizona State University astrobiologist Jack Farmer studies an outflow colored by microorganisms that flows from the hot springs at El Tatio in Chile. The microorganisms appear nearly identical to silica structures found by the NASA Spirit rover at a site on Mars.
Credit: Steve Ruff
Billions of dollars have been spent in reconnoitering Mars since the 1960s. That world has been on the receiving end from Earth of robotic flybys, photo-snapping orbiters and numbers of nose-diving craft onto its surface.
Indeed, the Red Planet has been radar pinged, crashed into, soft landed upon, scooped up, digested and laser zapped, wheeled across and generally scuffed up.

Nathalie Cabrol, Senior Research Scientist and Director of the Carl Sagan Center at the SETI Institute in Mountain View, California. Cabrol is shown here at Salar Grande, Atacama Desert, Chile in November 2016, looking for signs of microbial colonies in salt crystals.
Credit: Victor Robles, Campoalto/SETI Institute NAI Team 2016.
Poker-faced world
Decades later it remains a poker-faced world – with the house odds suggesting it could be an extraterrestrial address for life. If so, Mars is not giving up its secrets easily — or to stretch the metaphor more – holding its cards tight.
Scientists continue to, quite literally, chip away at finding the truth. Locating evidence of present-day life on that planet is viewed by Mars researchers as a watershed event but also a perplexing quest.
Take a look at my new story for Scientific American story at:
The Search for Life on Mars Is about to Get Weird
https://www.scientificamerican.com/article/the-search-for-life-on-mars-is-about-to-get-weird/

An ordinary construction brick, left, and an experimental brick made of a protein/lunar regolith mixture. |
Credit: Mia Allende
NASA and civil engineers at Stanford University have teamed up to explore use of a form of concrete to fabricate structures on the Moon and Mars.
David Loftus at NASA’s Ames Research Center reached out to Michael Lepech, an associate professor of civil and environmental engineering at Stanford School of Engineering. Lepech has been working on increasing environmental sustainability in construction, including ways to reduce the energy used in making concrete.
The researchers have used animal protein to make a promising form of concrete.
According to a Stanford press release, in search of a less energy-intensive alternative to make concrete, Loftus and Lepech turned to biology.
Slaughterhouses
Living organisms use proteins to make things as tough as shells, bones and teeth, so the researchers began working on a concrete bound together with a protein from bovine blood. The protein is a fairly cheap by-product of slaughterhouses, and it is known to become very gluey when mixed with soil.
To replicate the conditions on Mars and the Moon, Lepech combined the protein with simulated extraterrestrial soils that are similar to what’s on Mars and the Moon. And because Mars has much lower gravity than Earth – bad for cement mixing – the researchers applied a vacuum technology used to make composite materials in products such as boat hulls.

NASA Ames Vertical Gun Range.
Credit: NASA
Recycled organic waste
The first batch was as strong as the concrete used for sidewalks and patios – a good start. It also held up well to a simulated bombardment of micrometeorites, which the researchers replicated by taking the material to the Ames Vertical Gun Range and blasting it with high-speed gas particles.
For the purposes of making concrete off Earth, the idea is to create biological “factories” of organisms that are genetically engineered to produce the protein binder. It’s the same way that biotech companies use genetically engineered bacteria to make synthetic hormones. The feedstock for those organisms would come from the settlement’s recycled organic waste.
Lepech says that bio-concrete isn’t yet ready for buildings and roads on Earth – but that it could be.

Credit: USAF
The record-setting, hush-hush mission by the U.S. Air Force’s X-37B space plane returned to Earth this morning, touching down for the first time at the Kennedy Space Center (KSC).
Launched from Florida atop an Atlas booster on May 20, 2015, the OTV-4 (Orbital Test Vehicle-4) has performed the program’s longest duration flight.
The Air Force is preparing to launch the fifth X-37B mission from Cape Canaveral Air Force Station later in 2017, according to the Air Force statement released this morning.
The OTV-4 conducted on-orbit experiments for 718 days during its mission, extending the total number of days spent on-orbit for the OTV program to 2,085 days.
The robotic mini-space plane is one of two reusable X-37B vehicles that constitute the space plane “fleet.” The just-ended OTV-4 space trek is the second flight of the second X-37B vehicle built for the Air Force by Boeing.

Credit: USAF
Safe and successful
“Today marks an incredibly exciting day for the 45th Space Wing as we continue to break barriers,” said Brig. Gen. Wayne Monteith, 45th Space Wing commander. “Our team has been preparing for this event for several years, and I am extremely proud to see our hard work and dedication culminate in today’s safe and successful landing of the X-37B,” Monteith said in an Air Force press statement.
Appearing like a miniature version of NASA’s now-retired space shuttle orbiter, the reusable military space plane is 29 feet (8.8 meters) long and 9.6 feet (2.9 meters) tall, and has a wingspan of nearly 15 feet (4.6 meters).
The space drone has a payload bay about the size of a pickup truck bed that can be outfitted with a robotic arm. It has a launch weight of 11,000 pounds (4,990 kilograms) and is powered on orbit gallium arsenide solar cells with lithium-ion batteries.

The X-37B Orbital Test Vehicle mission 4 (OTV-4), the Air Force’s unmanned, reusable space plane, landed at NASA’s Kennedy Space Center Shuttle Landing Facility May 7, 2017.
Credit: USAF
Tight-lipped affair
A third mission of the Boeing-built X-37B Orbital Test Vehicle was completed on Oct. 17, 2014, when it landed and was recovered at Vandenberg Air Force Base in California following a successful 674-day space mission.
OTV-4 has shattered that previous long-duration flight achievement.
What this “winged warrior” did high above Earth is an on-going, tight-lipped affair. But for this mission, some payloads onboard the OTV-4 craft were previously identified.
For example, Aerojet Rocketdyne has said that its XR-5A Hall Thruster had completed initial on-orbit validation testing onboard the X-37B space plane. Also onboard was a NASA advanced materials investigation.

Track record
The first OTV mission began April 22, 2010, and concluded on Dec. 3, 2010, after 224 days in orbit.
The second OTV mission began March 5, 2011, and concluded on June 16, 2012, after 468 days on orbit.
An OTV-3 mission chalked up nearly 675 days in orbit when it landed Oct. 17, 2014.
KSC landing
Previously, all the OTV craft to date guided their way on auto-pilot to a Vandenberg Air Force Base, California tarmac-touchdown.
That has changed with the OTV-4 mission touchdown at KSC. Work has long been underway to consolidate X-37B space plane operations, including use of NASA’s Kennedy Space Center in Florida as a landing site for the robotic space plane.
A former KSC space-shuttle facility known as Orbiter Processing Facility (OPF-1) was converted into a structure that enables the Air Force “to efficiently land, recover, refurbish and relaunch the X-37B Orbital Test Vehicle (OTV),” according to Boeing.
The X-37B vehicle development falls under the Boeing Space and Intelligence Systems in El Segundo, California, the firm’s center for all space and experimental systems and government and commercial satellites.
The Air Force Rapid Capabilities Office is leading the Department of Defense’s OTV initiative, by direction of the Under Secretary of Defense for Acquisition, Technology and Logistics and the Secretary of the Air Force.

Former shuttle processing area at the Kennedy Space Center has been overhauled by Boeing to prep the military’s secretive X-37B space plane.
Credit: Malcolm Glenn
Pleased with performance
“The landing of OTV-4 marks another success for the X-37B program and the nation,” said Lt. Col. Ron Fehlen, X-37B program manager.
“This mission once again set an on-orbit endurance record and marks the vehicle’s first landing in the state of Florida. We are incredibly pleased with the performance of the space vehicle and are excited about the data gathered to support the scientific and space communities. We are extremely proud of the dedication and hard work by the entire team,” Fehlen said in the Air Force press statement.
“The hard work of the X-37B OTV team and the 45th Space Wing successfully demonstrated the flexibility and resolve necessary to continue the nation’s advancement in space,” said Randy Walden, Director of the Air Force Rapid Capabilities Office.

A previous X-37B being readied for launch atop Atlas booster. Next mission — OTV-5 — is set to fly by close of 2017.
Credit: Boeing
“The ability to land, refurbish, and launch from the same location further enhances the OTV’s ability to rapidly integrate and qualify new space technologies,” Walden said.
Check out this landing view from the Secretary of the Air Force, at:
https://www.dvidshub.net/video/523061/x37b-otv4-landing-runway
Also, go to:
https://www.dvidshub.net/video/523059/x37b-otv4-landing-profile

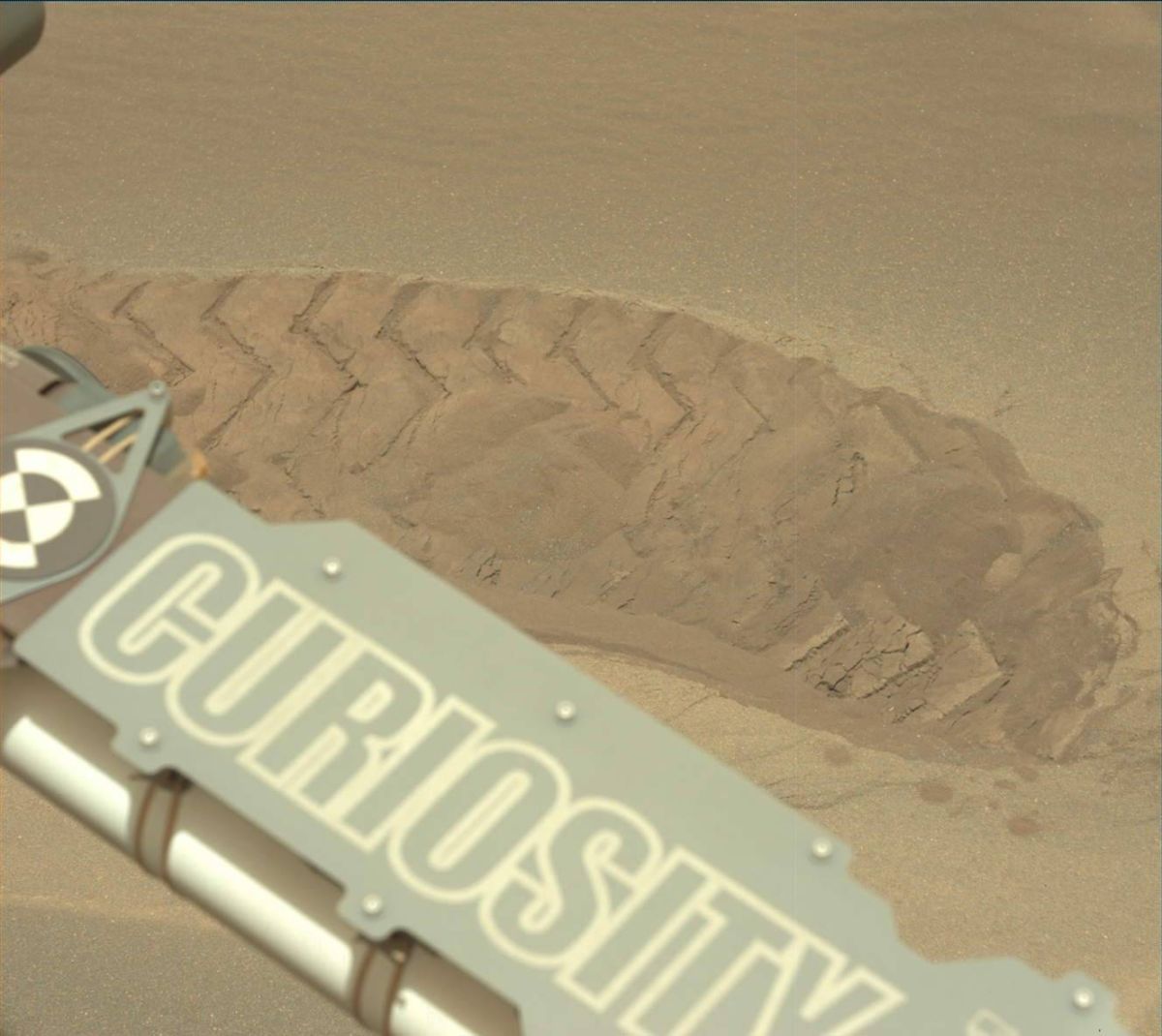
Curiosity Hazcam Right B image acquired on Sol 1688, May 6, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 1689 science duties
Reports Michelle Minitti, a planetary geologist for Framework in Silver Spring, Maryland, the robot has parked itself in front of a megaripple.
Compare and contrast
In surveying the sandy feature, scientists are studying its physical and chemical characteristics, comparing and contrasting it to the sands investigated during the rover’s recent Bagnold dune campaign.
Over the weekend, the plan calls for high priority observations of the megaripple, Minitti notes.
Curiosity planning includes Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) observations of the target “Schoolhouse Ledge” along the ripple crest, and the target “Man of War Brook” along the flank of the ripple.
Curiosity Mastcam Left image taken on Sol 1686, May 4, 2017.
Credit: NASA/JPL-Caltech/MSSS
Wheel scuff
To keep the structure of the ripple crest pristine for MAHLI photography, the rover’s Chemistry & Camera (ChemCam) shot laser pulses across another part of the ripple crest – the target “Gilpatrick Ledge.”
“We also used ChemCam to interrogate the target “The Gorge,” located inside the wheel scuff the rover planners purposely cut into the ripple to expose its interior structure,” Minitti adds.
Iron-bearing minerals
Also in the plans was use of the robot’s Mastcam, using filters at specific wavelengths of light to help constrain what iron-bearing minerals are present within the sands.
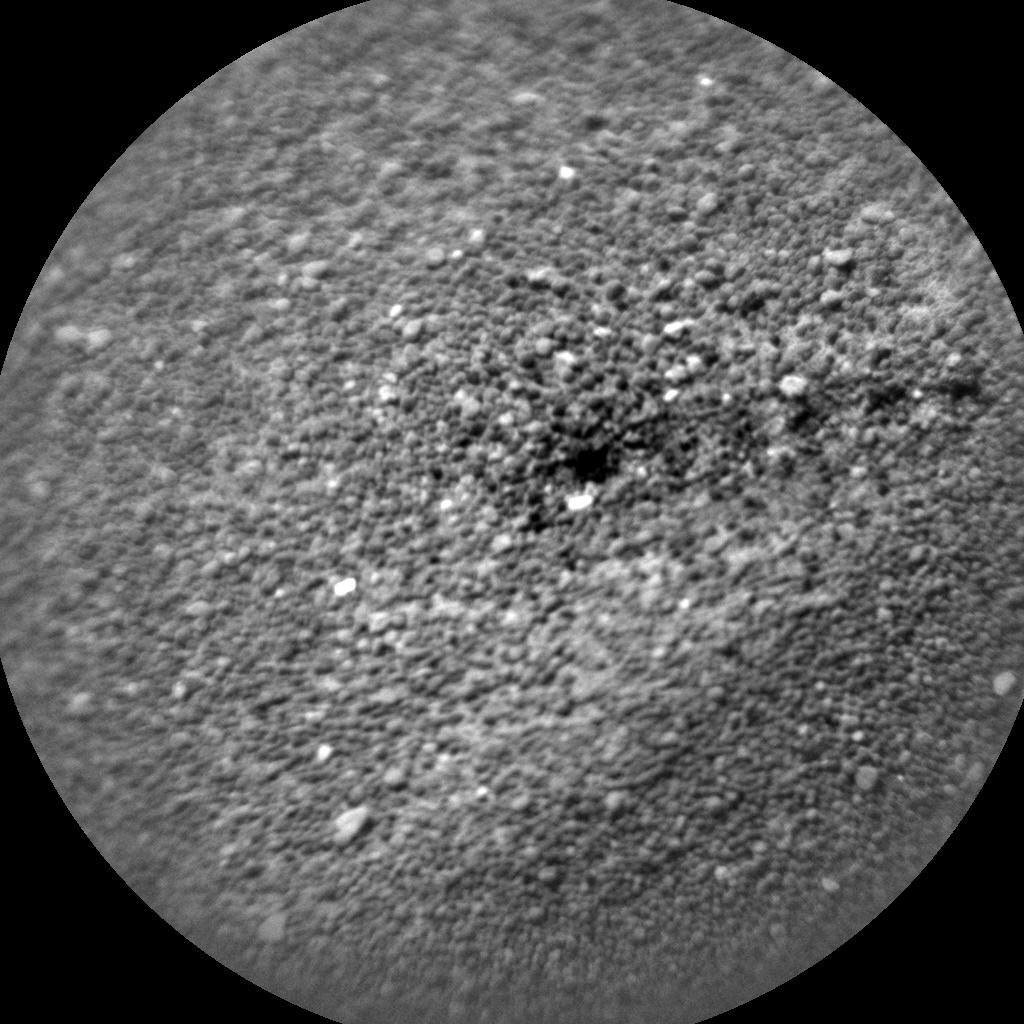
Laser pulses dot sand dune. Curiosity ChemCam Remote Micro-Imager photo taken on Sol 1687, May 5, 2017.
Image Credit: NASA/JPL-Caltech/LANL
The target for this observation was “Cobbosseecontee Lake,” which one Maine-dwelling member of the science team insisted was not challenging to say. It is actually pretty phonetic, Minitti suggests.
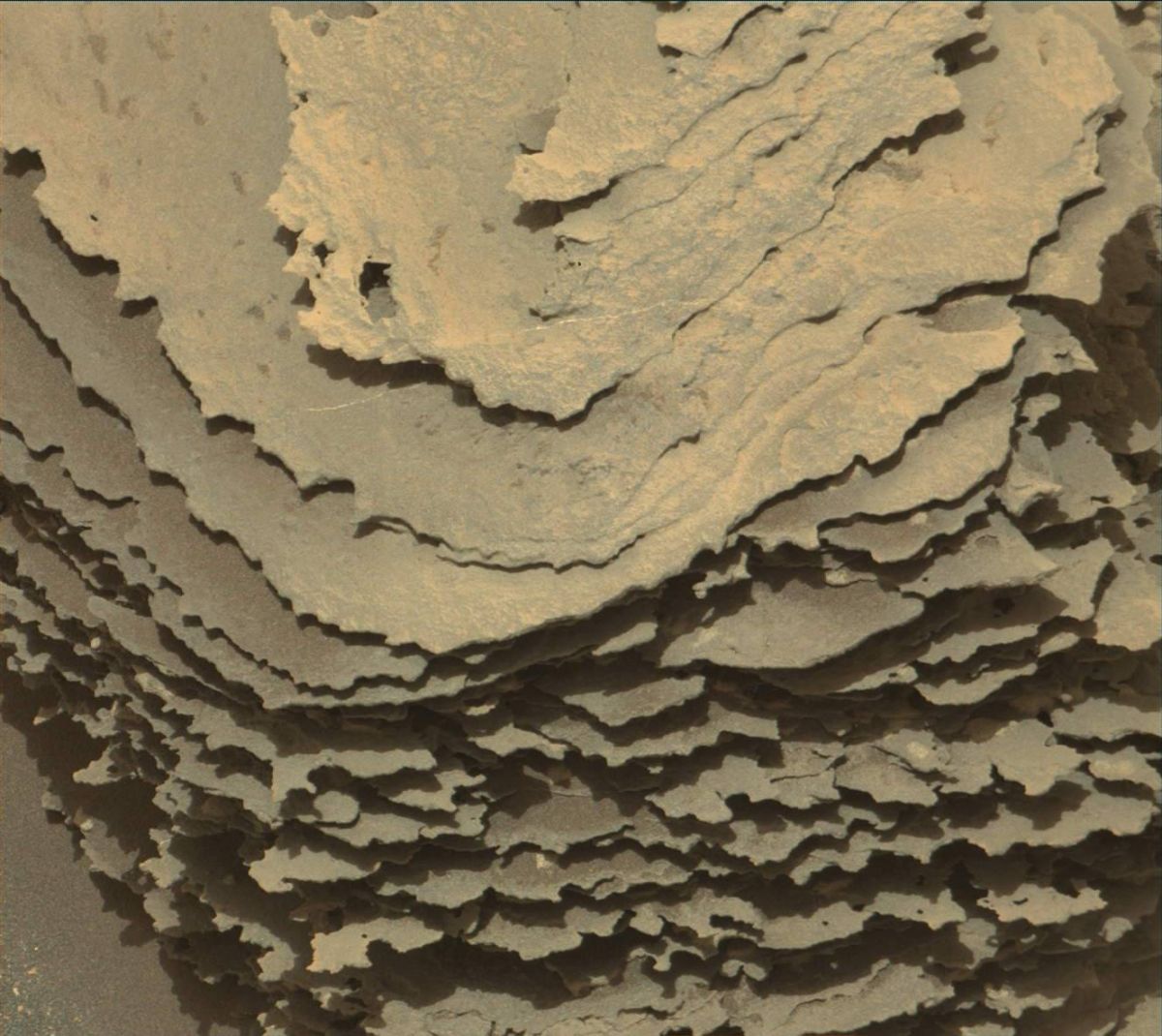
Well-layered bedrock
“Even with our focus on the megaripple,” Minitti adds, “there was still time to image the rocks around us with Mastcam, including an expanse of well-layered bedrock south of us called “Amphitheater Valley.”
Lastly, Curiosity began taking a series of Mars Descent Imager (MARDI) images – “one image acquired each evening we are parked at the megaripple – to look for wind-induced changes,” Minitti notes. “These change detection images help the team understand if (or how) wind activity and direction are changing as we leave the Bagnold dunes.”
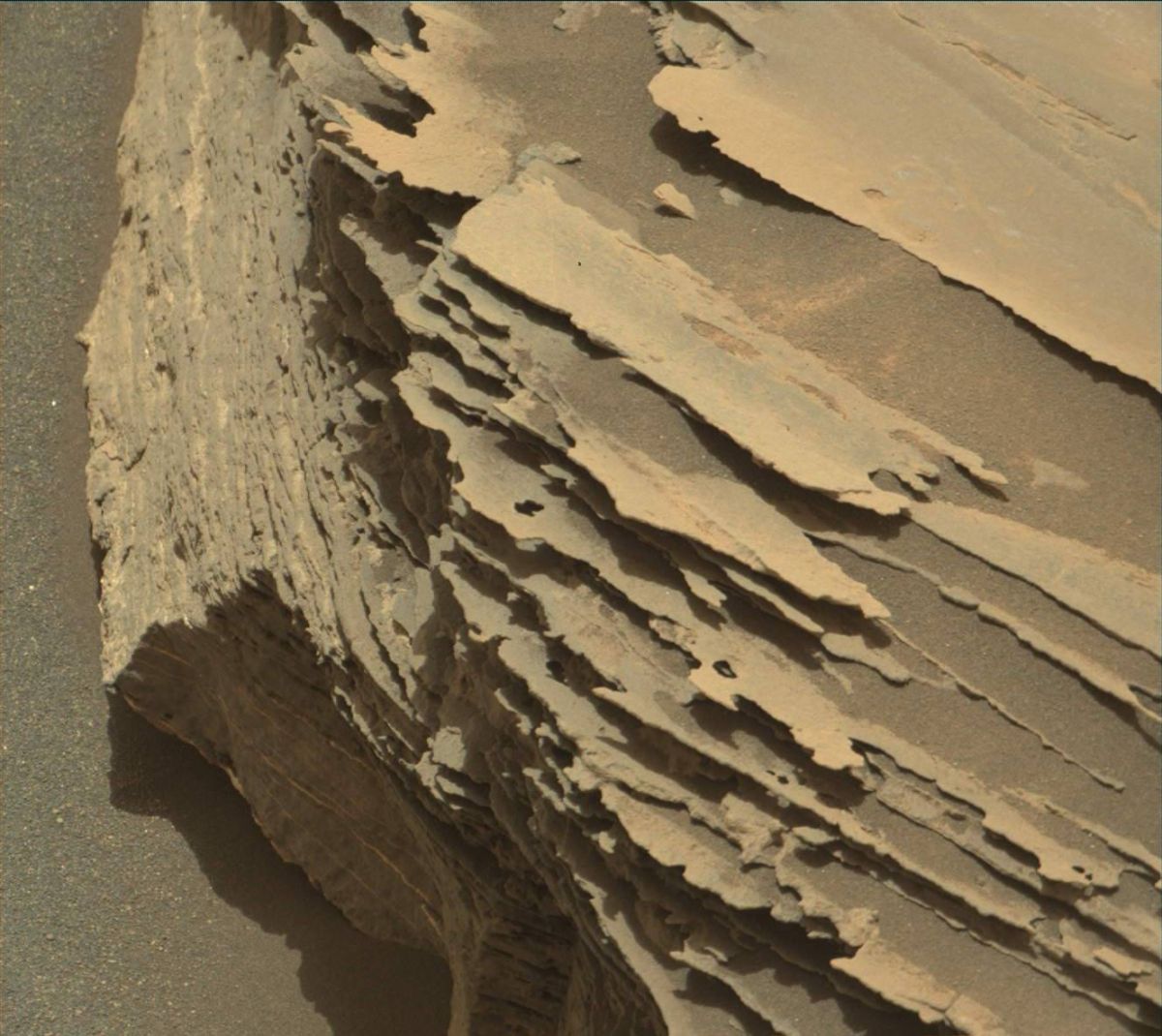
Curiosity Mastcam Right image taken on Sol 1686, May 4, 2017.
Credit: NASA/JPL-Caltech/MSSS
Also on the schedule is a dust devil survey to look for telltale signs of wind activity, as well as acquiring a long Dynamic Albedo of Neutrons (DAN) passive observation, and taking regular Radiation Assessment Detector (RAD) and Rover Environmental Monitoring Station (REMS) measurements.
Curiosity Mastcam Right image taken on Sol 1686, May 4, 2017.
Credit: NASA/JPL-Caltech/MSSS

