Author Archive

Credit: Iridium/SpaceX
Team Vandenberg in California is scheduled to launch the Iridium NEXT satellite on a SpaceX Falcon 9 rocket from Space Launch Complex-4 today, Sunday, June 25, at 1:25 p.m. PDT.
A backup launch opportunity opens at 1:19 p.m. PDT, or 20:19 UTC, on Monday, June 26.
Following stage separation, the first stage of Falcon 9 will attempt a landing on the “Just Read the Instructions” droneship that will be stationed in the Pacific Ocean.

Credit: SpaceX
On Friday, SpaceX successfully rocketed into orbit a Bulgarian communications satellite from NASA’s Kennedy Space Center in Florida. If all goes well, the back-to-back, bi-coastal launches (and landings of the Falcon 9’s first stage) would be a private-sector milestone and constitute a “weekend doubleheader.”
Network replacement
This is the second of eight planned Iridium NEXT launches. Each launch will contribute to replacing the company’s commercial satellite network. This launch will deliver the second payload of 10 Iridium NEXT satellites to orbit, bringing the total to 20 Iridium NEXT satellites in space.

Credit: Iridium
Iridium NEXT is replacing the Company’s existing constellation of satellites with more powerful capabilities, including Aireon’s space-based global real-time aircraft surveillance and tracking service.
Series of launches
Iridium has partnered with SpaceX for a series of eight launches scheduled to take place through mid-2018, delivering a total of 75 satellites to low-Earth orbit.
Iridium NEXT is the company’s $3 billion next-generation mobile, global satellite network scheduled for completion in 2018.
Flight safety system
This will be the first launch for Col. Michael S. Hough, 30th Space Wing commander, who took command on June 9th.
“As a side, this will also be our first launch with the Autonomous Flight Safety System, which is expected to help decrease launch costs and improve turnaround times between launches,” Hough said in an Air Force statement.
The Autonomous Flight Safety System debuted on its maiden flight from Kennedy Space Center on a Falcon 9 rocket earlier this year, leveraging software developed at the 30th Space Wing.
Live feed
A live feed of the launch will be available starting twenty minutes prior to launch at: www.spacex.com/webcast
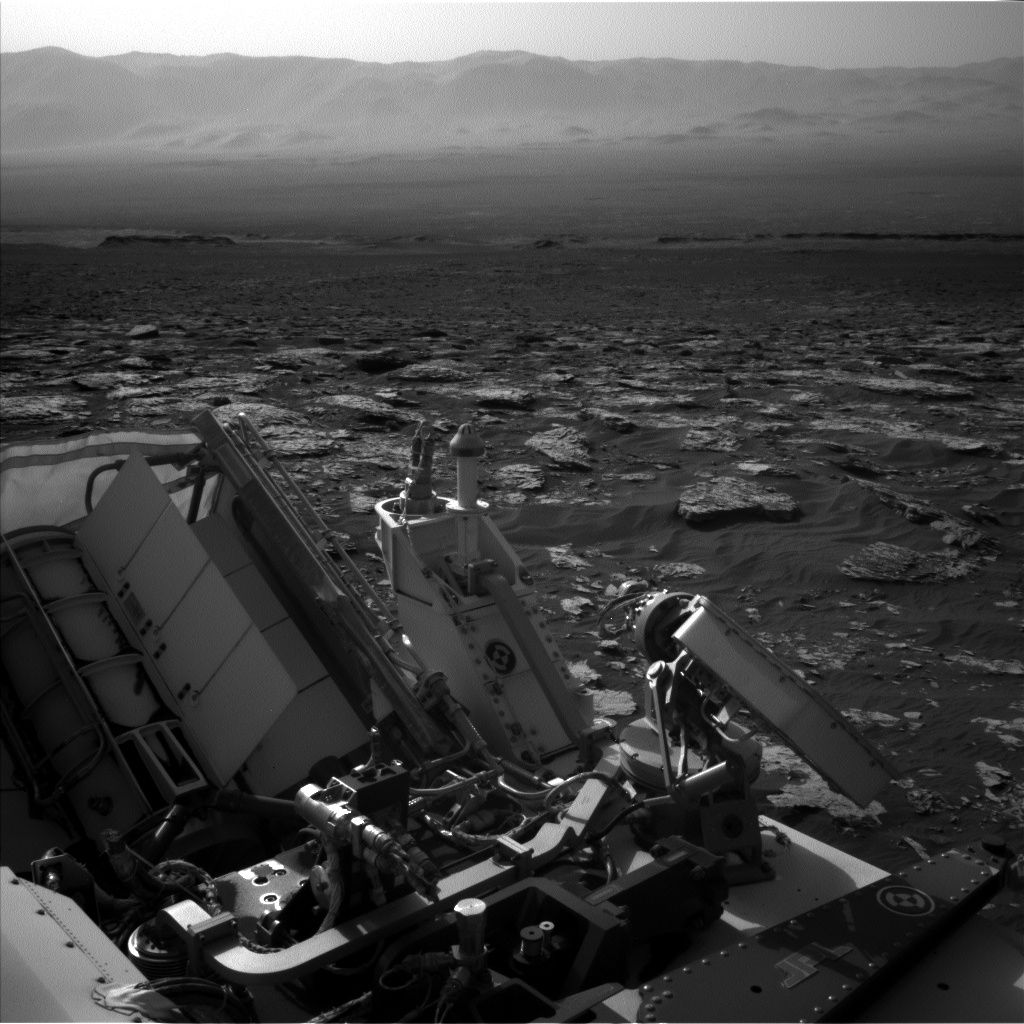
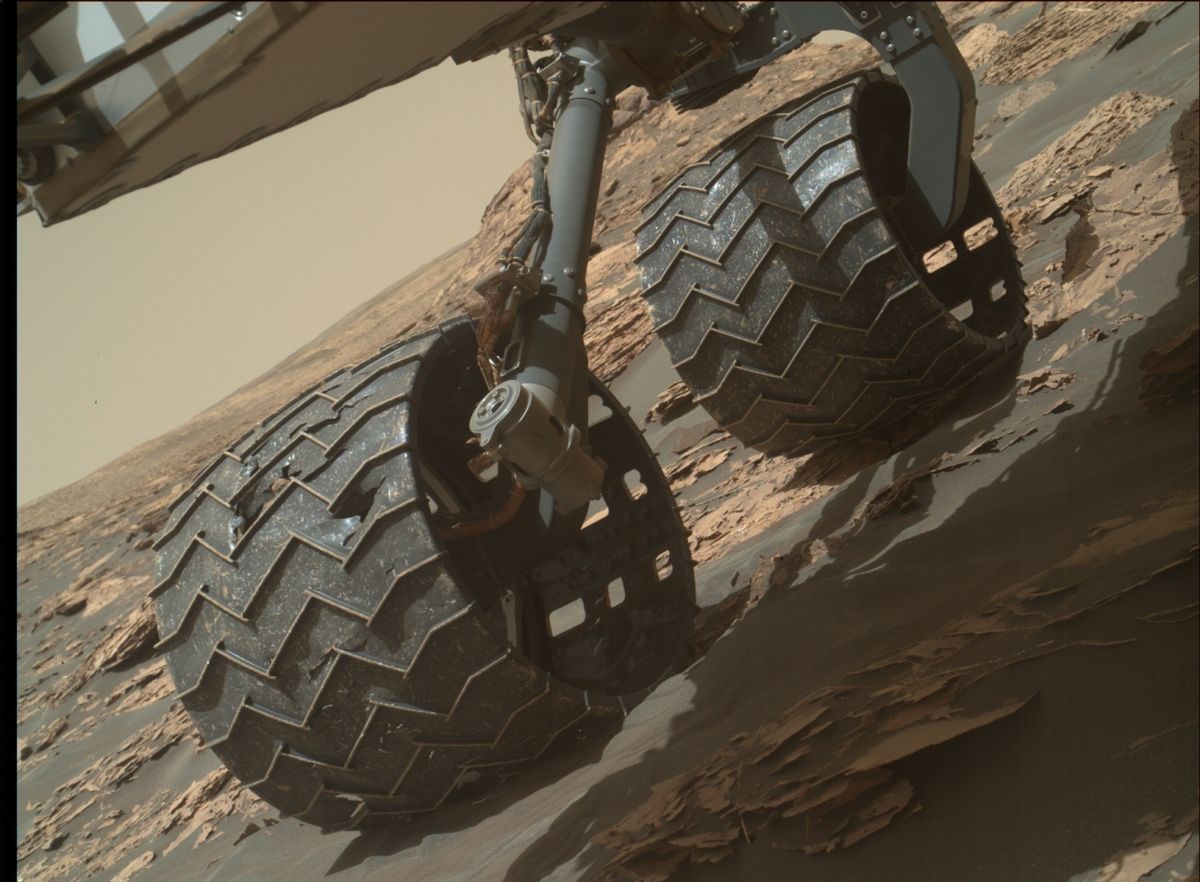
Curiosity Navcam Left B image taken on Sol 1734, June 22, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is busy carrying out Sol 1736 duties.
Following a drive of a little over 54 feet (16.6 meters), “Curiosity has presented us with another beautiful workspace,” report Michael Battalio, an atmospheric scientist at Texas A&M University in College Station and Mark Salvatore, a planetary Geologist from the University of Michigan in Dearborn.
The majority of last week’s rover activities were focused on imaging Vera Rubin Ridge to observe its stratigraphic and structural relationship to the underlying Murray formation.

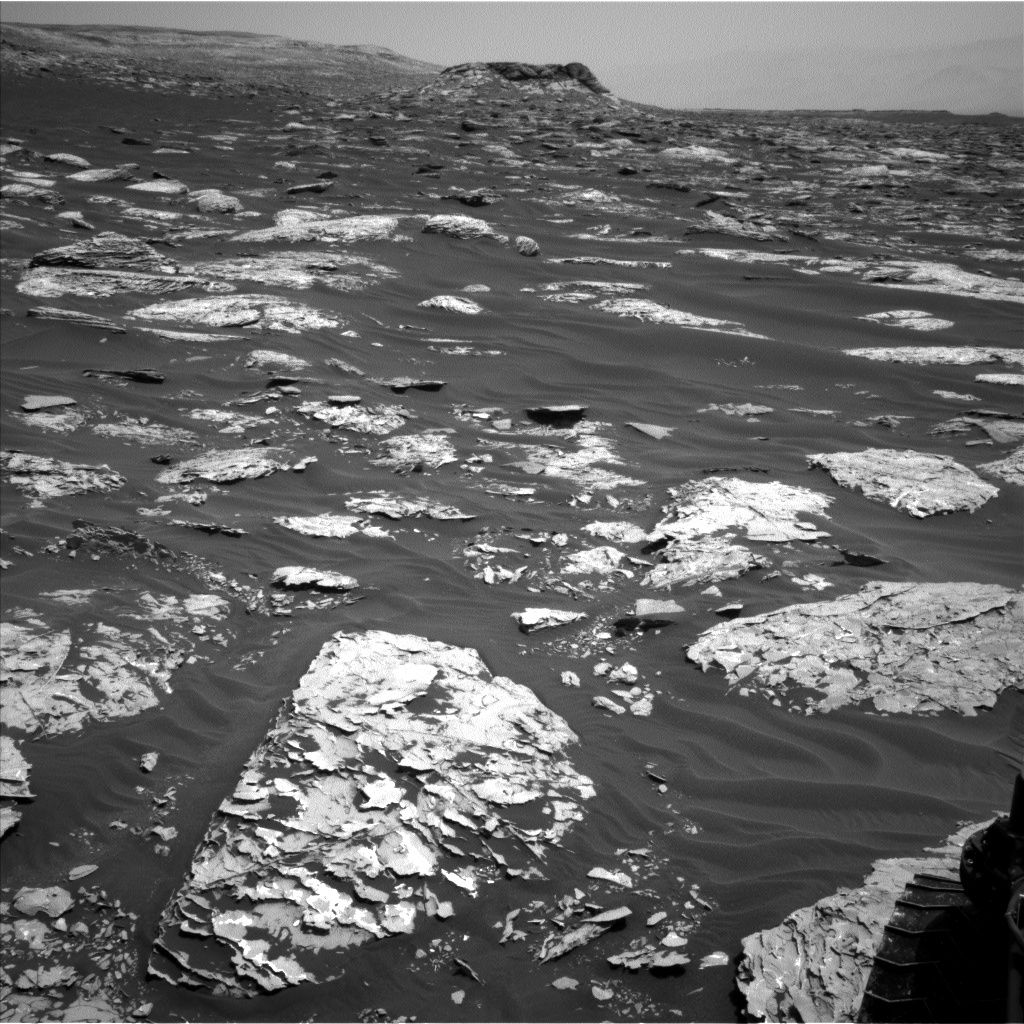
Curiosity Navcam Left B image taken on Sol 1734, June 22, 2017.
Credit: NASA/JPL-Caltech
Weekend plan
The weekend plan has the robot taking “a bit of a deviation from that, as we will be making numerous measurements of the local Murray formation,” Battalio and Salvatore note.
These “local” observations will be extremely valuable over the coming weeks, as Curiosity potentially transitions between two different geologic units: the Murray formation and Vera Rubin Ridge.
“The nature of this transition will hold important clues into the origin of the ridge and the evolution of Gale Crater as a whole,” Battalio and Salvatore explain.

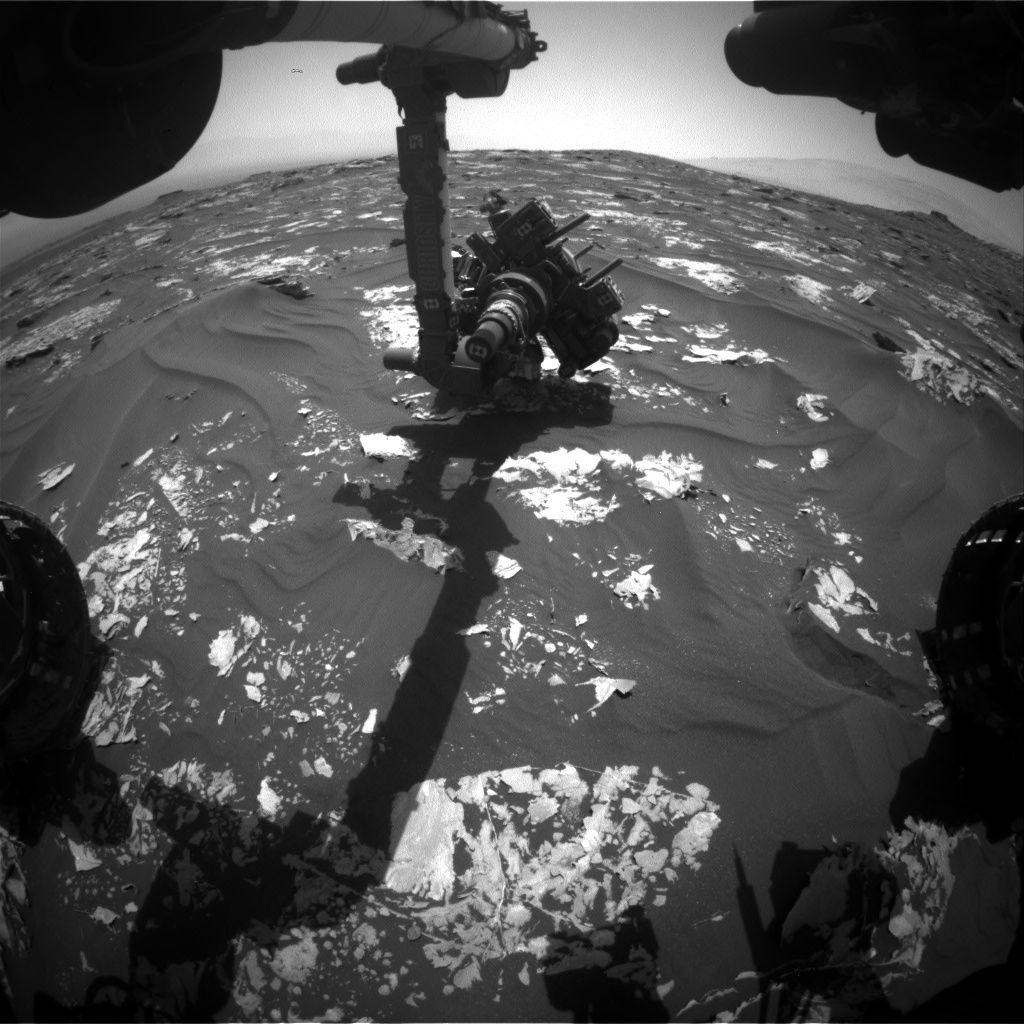
Curiosity Front Hazcam Left B image acquired on Sol 1735, June 23, 2017.
Credit: NASA/JPL-Caltech
New targets
Curiosity’s upcoming tasks include first using its Chemistry & Camera (ChemCam) to probe the composition of three rocky targets, followed by acquiring high-resolution Mastcam images to document the targets.
The first target, known as “Winter Harbor,” is situated in front of the rover and is a benign, flat, and finely layered piece of the Murray formation.
Next, ChemCam will target “Beaver Dam Pond,” that appears to be a block of the Murray formation that may have been tilted on its side.
Fractured block
The plan next calls for Curiosity to point her mast just off her back right wheel where ChemCam will investigate “Kitteredge Brook” – a more plate-like and fractured block that appears to have a vein running through it.
Lastly, Mastcam will image one additional block of typical layered rock of the Murray formation known as “Crippens Brook.” The exposed layering of this target will help determine whether this section of the Murray formation is similar or different than previously analyzed locations, Battalio and Salvatore report.
After these remote observations, Curiosity will untuck her arm and engage in contact science with the Winter Harbor target. First, the rover’s Dust Removal Tool will be used to brush away any surface dust.

Curiosity ChemCam Remote Micro-Imager photo taken on Sol 1733, June 21, 2017.
Credit: NASA/JPL-Caltech/LANL
Clues into chemistry
Curiosity is slated to then deploy the Alpha Particle X-Ray Spectrometer (APXS) to the target. That device uses the decay of the radioactive element curium to generate alpha particles and X-rays that interact with the surface material. The energy recorded coming from the surface material as a result of these interactions holds important clues into the chemistry of the surface materials.
Curiosity will leave the APXS instrument in contact with Winter Harbor overnight to integrate its signal and to derive a precise measurement of the material’s composition.
The next sol, Curiosity is scheduled to investigate the chemistry of one more target called “Blunts Point,” a wavy and fractured block. Making use of ChemCam, the robot will take two contextual Mastcam images of this target, and take an additional three Mastcam images of a separate block slightly closer to the rover known as “Blunts Pond.” That feature appears similar in texture to Blunts Point. Mastcam will then acquire a full multispectral image of Winter Harbor before departing this location to the east.

Curiosity Mastcam Right image acquired on Sol 1734, June 22, 2017.
Credit: NASA/JPL-Caltech/MSSS
Environmental observations
Curiosity is also slated to take multiple environmental observations in the plan.
Battalio and Salvatore also note that on Sol 1738, a morning imaging suite will be taken, which will include two Navcam cloud movies – a zenith movie looking directly above the rover and a supra-horizon movie looking towards the rim of Gale Crater.
Mastcam will make measurements to assess the amount of dust in the atmosphere.
Later on Sol 1738, Mastcam will repeat those measurements twice to determine diurnal variability in the atmospheric opacity.
The plan will also include Mars Hand Lens Imager (MAHLI) imaging of the Rover Environmental Monitoring Station (REMS) ultraviolet (UV) sensor to determine the amount of dust on the UV photodiodes, which is done approximately every 60 sols. REMS and Dynamic Albedo of Neutrons (DAN) measurements will be taken according to the usual cadence.

Previous Phobos eclipse ingress on Sol 964, acquired by Curiosity’s Mastcam Right back on April 23, 2015.
Credit: NASA/JPL-Caltech/MSSS
Phobos and Deimos imagery
Curiosity is scheduled to become once again a roving astronomer in the scripted plan.
The robot’s Mastcam is slated to take images of both of Mars’s moons, Phobos and Deimos.
“Deimos imaging will assist in more accurately defining the moon’s orbit, so is not constrained in timing during the night. The imaging of Phobos will capture its ingress into the shadow of Mars – a Martian lunar eclipse,” Battalio and Salvatore explain.
“This specific astronomical event occurs repeatedly at this time of year, but the timing of the imaging must be exact. Imaging before the eclipse begins and during the ingress allows for an estimation of the size and amount of dust in the upper atmosphere of Mars. This is possible because as eclipse begins, the light that is reflected off of Phobos must skim through the top of Mars’s atmosphere first,” Battalio and Salvatore point out. “This light can then be compared to imaging before eclipse begins. Repeating the Phobos observation at different times of year allows for probing of the atmosphere over different locations and at different altitudes due to the relative geometry changing.”

Credit: NASA/JPL-Caltech/University of Arizona
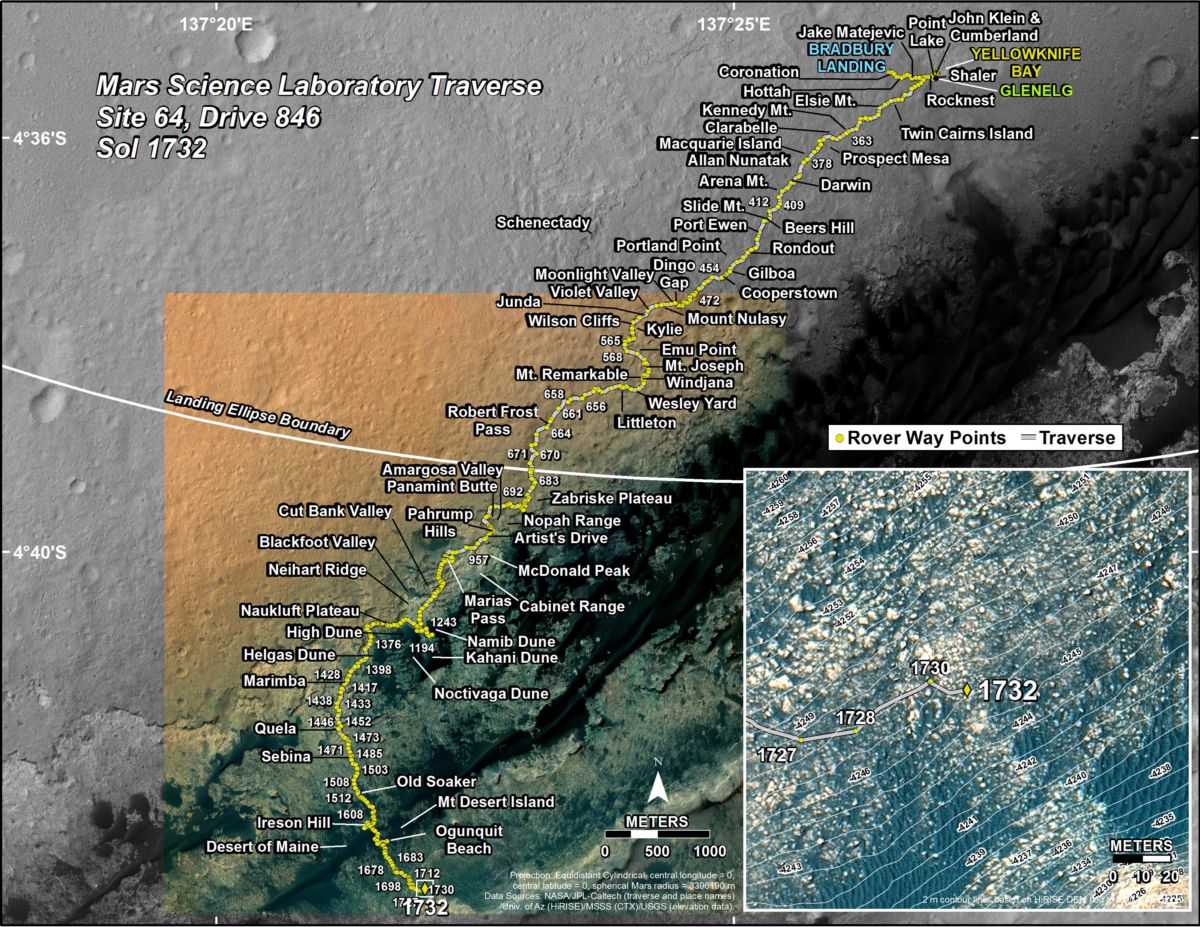
Road map
A new Curiosity traverse map through Sol 1734 has been issued by the Jet Propulsion Laboratory.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1734 Martian day, or sol, of the rover’s mission on Mars (June 23, 2017).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1732 to Sol 1734, Curiosity had driven a straight line distance of about 53.30 feet (16.25 meters), bringing the rover’s total odometry for the mission to 10.44 miles (16.81 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

NASA’s aging Mars Reconnaissance Orbiter is the most data-productive spacecraft circling the Red Planet. Earlier this year it cruised past its 50,000th orbit since arriving at the planet in March 2006.
Credit: NASA/JPL
There’s a cry of help from and for the Red Planet, a plea for a Next Mars Orbiter – or NeMO for short. This spacecraft could be a super-slick communications relay and also snoop out and chart Martian resources for future use by human expeditionary crews.
Conceptual sketch of a Next Mars Orbiter (NeMO).
Credit: NASA/JPL-Caltech/Charles Whetsel/Robert Lock
But all that said, at what point does NeMO become a “Christmas tree” spacecraft? That is, a mission that is arguably weighed down with too many ornaments and limping limbs while sucking up more and more development dollars.
For more information, go to my new Scientific American story:
Will Mars Go Mute? NASA’s Aging Orbiters May Not Last Long Enough to Support Future Exploration
Go to:

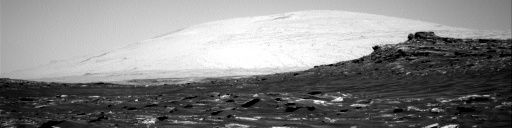
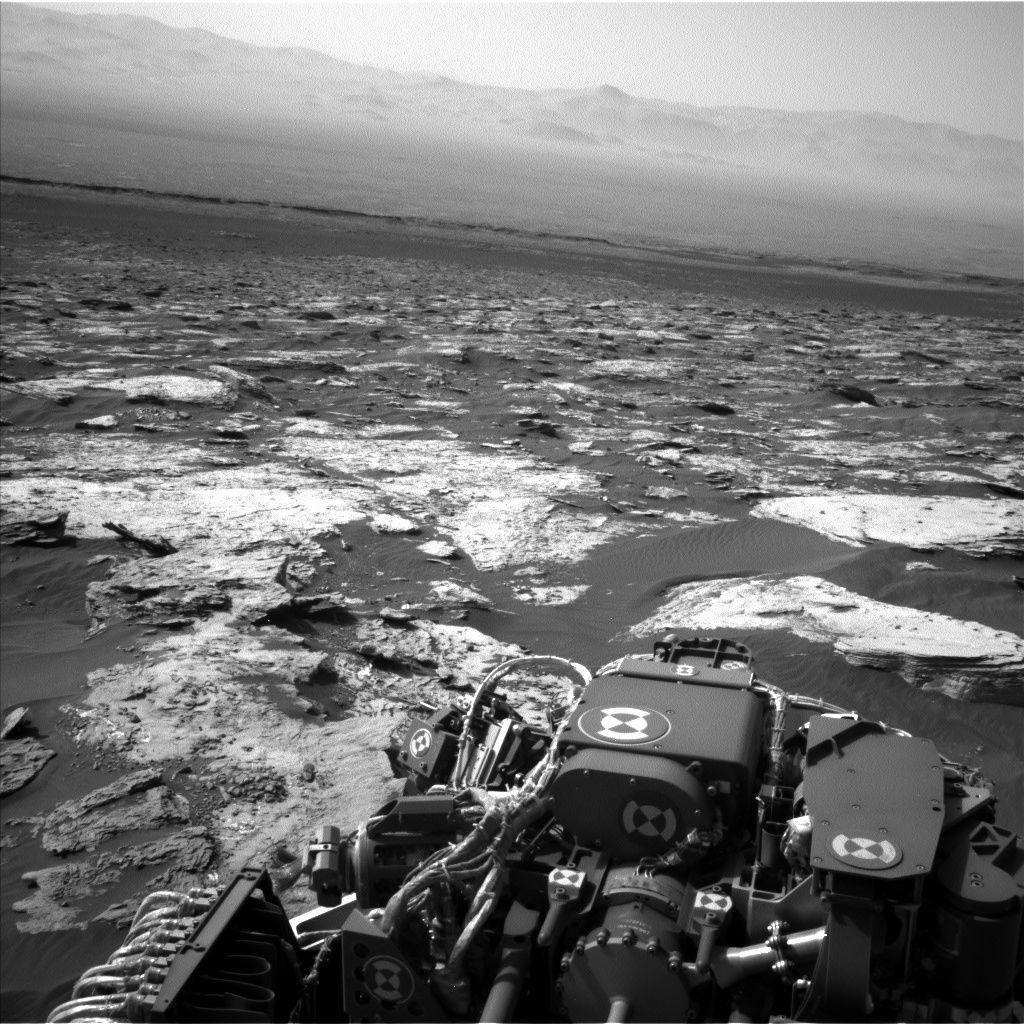
Curiosity Mastcam Left image taken on Sol 1732, June 20, 2017.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is performing Sol 1734 duties and “gazing longingly towards Vera Rubin Ridge,” reports Mark Salvatore, a planetary geologist and a Curiosity participating scientist and faculty member at Northern Arizona University.

Curiosity Mastcam Left image taken on Sol 1732, June 20, 2017.
Credit: NASA/JPL-Caltech/MSSS
“Curiosity continues to drive to the east-northeast around two small patches of dunes that are positioned just north of Vera Rubin Ridge,” Salvatore adds. “Once beyond this easternmost dune patch, the plan is for her to turn to the southeast and towards the location identified as the safest place for Curiosity to ascend the ridge.”
Salvatore reports that this ridge ascent point is roughly 1,214 feet (370 meters) away, which is less than the exterior length of Wembley Stadium in London. “If only the path ahead were as smooth as a soccer pitch!”
Variations in brightness
Following a drive of roughly 50 feet (15 meters) the robot is situated in front of several small patches of rock about the size of large textbooks.
Curiosity Navcam Right B image taken on Sol 1733, June 21, 2017.
Credit: NASA/JPL-Caltech
“One of these rocks, a target known as “Pecks Point” exhibits some interesting variations in brightness,” Salvatore notes, so its chemistry will be analyzed using the Alpha Particle X-Ray Spectrometer (APXS) and Chemistry and Camera (ChemCam) instruments, and it will be imaged using both the Mars Hand Lens Imager (MAHLI) and Mastcam.
Ridge viewing
“The remainder of the science for this plan is focused on gazing longingly towards Vera Rubin Ridge. From this vantage point, we will be acquiring imagery of the northern exposure of the ridge — named “Northern Neck” — using several techniques,” Salvatore says.

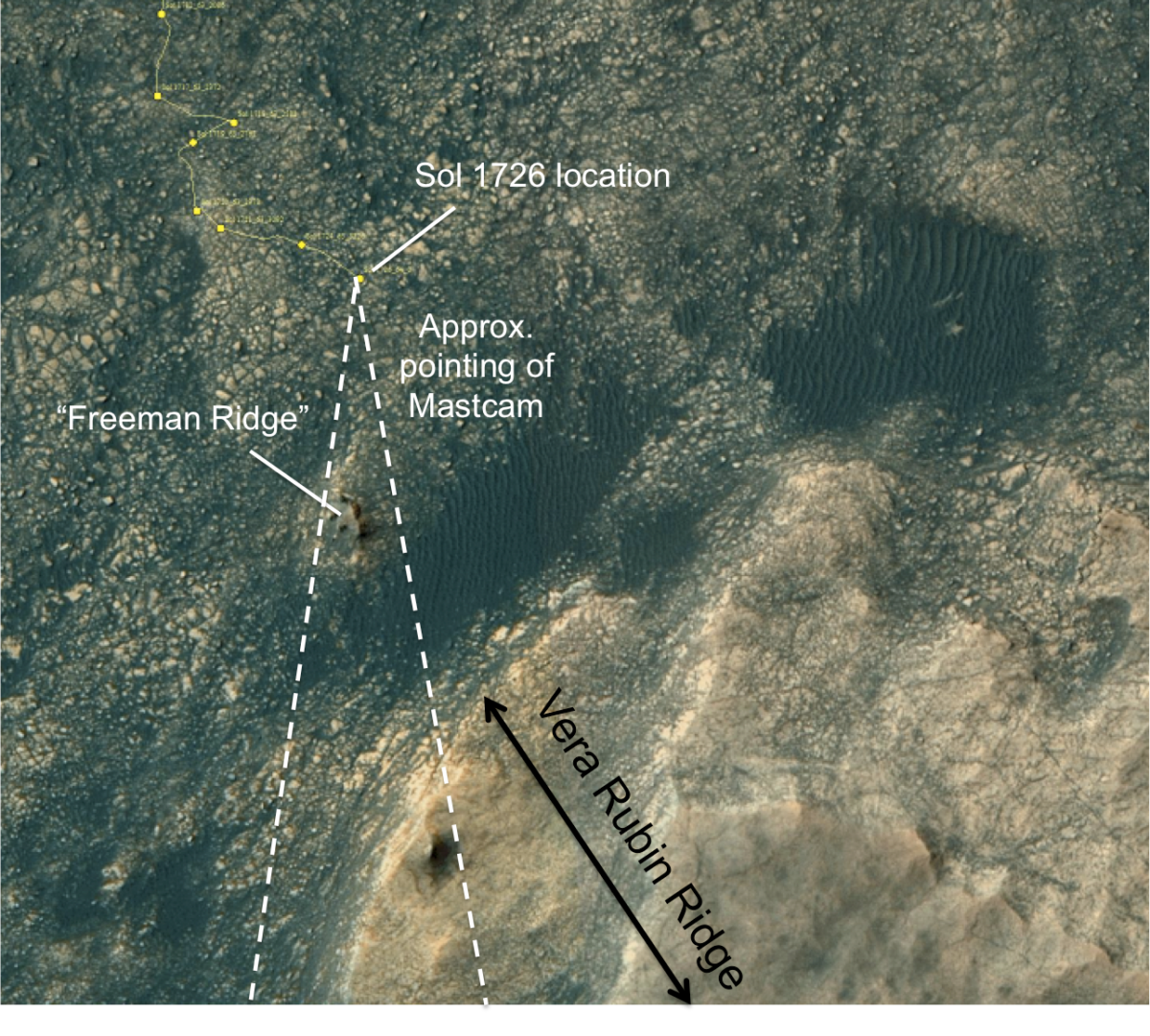
Courtesy: Abigail Fraeman.
First in the plan is to use the multispectral capabilities of Mastcam to investigate any possible compositional variations observed within this lower ridge material. Next in the plan is to take a series of overlapping high-resolution images using ChemCam’s remote microimager.

Curiosity Mastcam Left image acquired on Sol 1730, June 18, 2017.
“Although these images won’t cover the entirety of the exposure,” Salvatore notes, “they will allow scientists to interrogate the fine-scale sedimentary structures present within the ridge.
On the plan is to again turn to the rover’s Mastcam to image the entirety of “Northern Neck” in true-color, “similar to how your eyes would perceive the ridge if you were standing on the surface,” says Salvatore.
Curiosity Navcam Left B image taken on Sol 1733, June 21, 2017.
Credit: NASA/JPL-Caltech
Hematite
After this science imaging, Curiosity is slated to again take off driving towards the east-northeast. The following day, Curiosity will image the rover deck using Mastcam, hunt for dust devils using the navigation cameras, and acquire additional chemistry data of local targets using ChemCam’s automated target selection software known as AEGIS.
Salvatore explains that one of the key compositional properties of Vera Rubin Ridge is the presence of the iron oxide phase hematite, as determined from orbital observations.
Key questions
“Iron oxides are the primary constituents of rust on Earth, which can exhibit spectacular variations in color,” Salvatore points out, “so identifying and characterizing minor color variations throughout the ridge will be important as the mission continues towards the ridge.”
What is the lateral and vertical distribution of these unique iron oxide phases? Do they vary significantly over the rover’s traverse?
“These questions and many more,” Salvatore concludes, “will continue to be the focus of the [Curiosity] MSL science team for months to come!”
Credit: NASA/JPL-Caltech/University of Arizona
Road map
Meanwhile, the Jet Propulsion Laboratory has issued a Curiosity traverse map through Sol 1732.
The map shows the route driven by NASA’s Mars rover Curiosity through the 1732 Martian day, or sol, of the rover’s mission on Mars (June 21, 2017).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1730 to Sol 1732, Curiosity had driven a straight line distance of about 42.92 feet (13.08 meters), bringing the rover’s total odometry for the mission to 10.43 miles (16.79 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Credit: Astrobotic
The world’s first laser communication link…from the Moon!
A laser communications terminal on a private firm’s upcoming mission to the Moon has been announced during this week’s Paris Air Show.
Astrobotic of Pittsburgh, Pennsylvania and ATLAS Space Operations Inc. of Traverse City, Michigan are now linked at the laser – offering up to one gigabit per second of data to its customers.
“This is an historic, thousand-fold increase of bandwidth for Astrobotic’s lunar mission,” explains the firm’s press statement.
Virtual reality from the Moon
John Thornton, CEO of Astrobotic says: “Laser communications have been sought after by planetary missions for years. ATLAS and Astrobotic are now making this capability a reality.”
According to Thornton, laser communications on the Moon will expand payload capabilities dramatically, enabling high definition video, ground breaking data-intensive experiments…even virtual reality experiences from the Moon.
“No doubt this is a foundational capability for building our future on the Moon,” Thornton adds.

Credit: ESA/NASA
Game changer
The ATLAS network provides affordable cloud based solutions for space access in the rapidly growing global space market.
Sean McDaniel, CEO of ATLAS, explains that the partnership is “a real game changer” for lunar communications.”
McDaniel says, up to now, communications for lunar missions have had no collaboration or continuity in efforts, meaning each time another mission launches, there needs to be a new communications solution.
“But our optical communications terminal provides Astrobotic’s customers with a turnkey solution,” McDaniel explains, for strong and reliable communications for the foreseeable future – between lunar missions and Earth.

Peregrine lunar lander.
Credit: Astrobotic
Lunar logistics
Astrobotic Technology Inc. describes themselves as a lunar logistics company that delivers payloads to the Moon for companies, governments, universities, non-profits, and individuals.
The company’s spacecraft accommodates multiple customer payloads on a single flight, at $1.2 million per kilogram.
Astrobotic is an official partner with NASA through the Lunar CATALYST program, has 22 prior and ongoing NASA contracts, a commercial partnership with Airbus DS, a corporate sponsorship with DHL.
The new partnership brings the total number of deals in place for Astrobotic’s mission to the Moon to eleven.
CATALYST
NASA’s Lunar Cargo Transportation and Landing by Soft Touchdown (Lunar CATALYST) initiative is establishing multiple no-funds-exchanged Space Act Agreement (SAA) partnerships with U.S. private sector entities. The purpose of these SAAs is to encourage the development of robotic lunar landers that can be integrated with U.S. commercial launch capabilities to deliver payloads to the lunar surface.

Credit: NASA
Back in April 2014, NASA announced selection of three U.S. companies to negotiate no-funds exchanged partnership agreements with the agency to advance lander capabilities that will enable delivery of payloads to the surface of the moon, as well as new science and exploration missions of interest to NASA and scientific and academic communities.
The selected companies were:
— Astrobotic Technology, Inc., Pittsburgh
— Masten Space Systems, Inc., Mojave, Calif.
— Moon Express, Inc., Moffett Field, Calif.

Cargo carrying Peregrine lander.
Credit: Astrobotic
Keepsake MoonBox
Astrobotic is also accepting small mementos for inclusion on its first mission to the Moon. The Moon Capsule protects an individual’s keepsake in flight and on the lunar surface.
All of the Moon Capsules on a flight will be integrated into a single Moon Pod on the Peregrine lunar lander.
After the lunar landing, MoonBox™ participants will receive images and videos of the Moon Pod on the Moon, attached to Astrobotic’s lander.
Resources
For more information on Astrobotic, go to their website at:
Also, go to this informative video at:
https://www.youtube.com/watch?v=y4xQ9e6zGaM
For additional info regarding ATLAS Space Operations, go to their Space 2.0 video at:
https://www.youtube.com/watch?v=kauAOpoacMo&feature=youtu.be

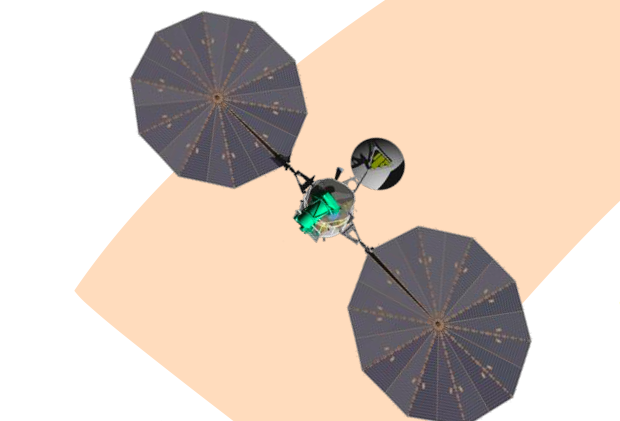
Artist concept of the Tianzhou-1 cargo resupply spacecraft now in Earth orbit.
Credit: CMSE
China’s Tianzhou-1 cargo spacecraft has begun independent operation Wednesday, backing away from theTiangong-2 space lab.
Ground controllers initiated a separation of Tianzhou-1 from the space lab. The cargo ship stopped at a distance of nearly 400 feet (120 meters) in front of the Tiangong-2.

Credit: CMSA
The cargo spacecraft will continue space science experiments and applications. Tianzhou-1 is to carry out a “fast docking” with Tiangong-2 and a third in-orbit refueling.
That event is reportedly to occur near the end of its six-month mission, with Tianzhou demonstrating the fast docking procedure with Tiangong 2 – a simulation to mimic future crew and cargo spacecraft dockings with the orbital space station in six hours after launch.
Mastering refueling
As reported by CCTV, the two spacecraft completed their first in-orbit refueling on April 27 and their second on June 15. The Tianzhou-1 supply ship was launched on April 20 from south China’s Hainan Province.

Credit: CSIS
Following Russia and the United States, China is the third country to master refueling techniques in space, a capability the country needs for building and sustaining a permanent space station in the mid-2020s.
“As the International Space Station is set to retire in 2024, the Chinese space station will offer a promising alternative, and China will be the only country with a permanent space station,” explains CCTV.
Credit: CCTV

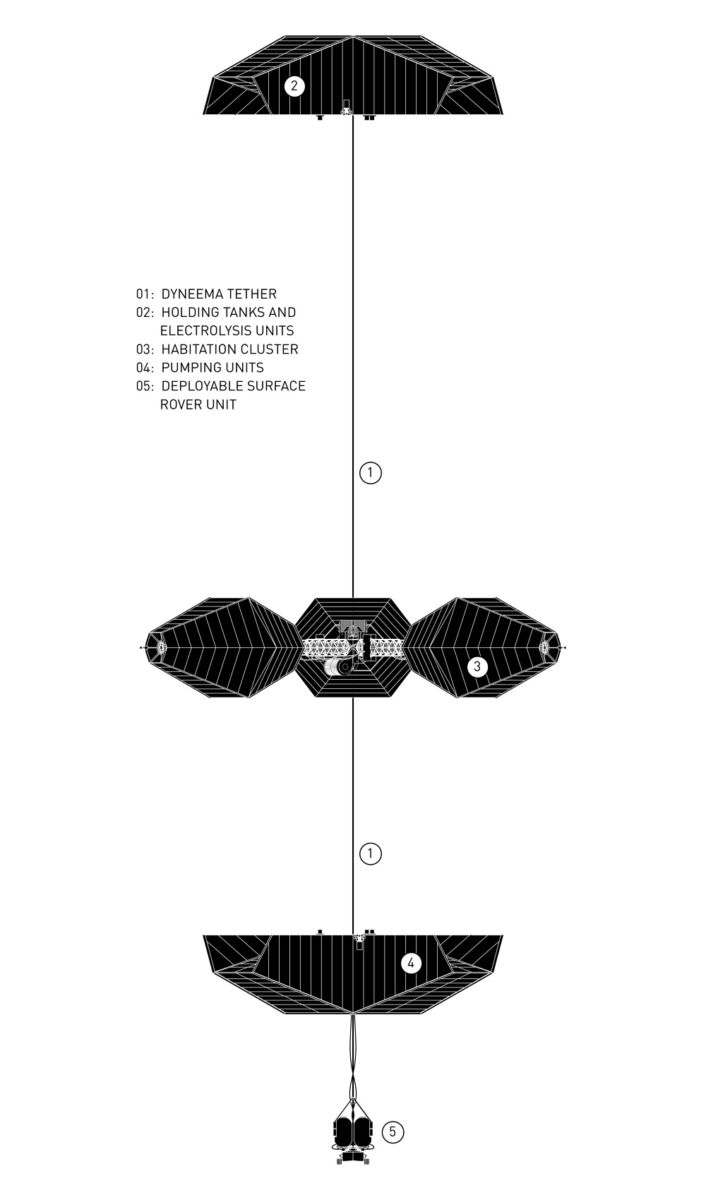
Credit: Clouds AO
Forget looking but don’t touch!
The concept is called HydroLander – an interplanetary long duration exploration vehicle focused on a human, on-the-spot search for life on the icy moons of Jupiter and Saturn.
According to the principal architects of the idea — Ostap Rudakevych and Masayuki Sono at the Clouds Architecture Office in New York – this explorer module is able to touch down on the surface of those icy worlds and take samples or harvest water ice.
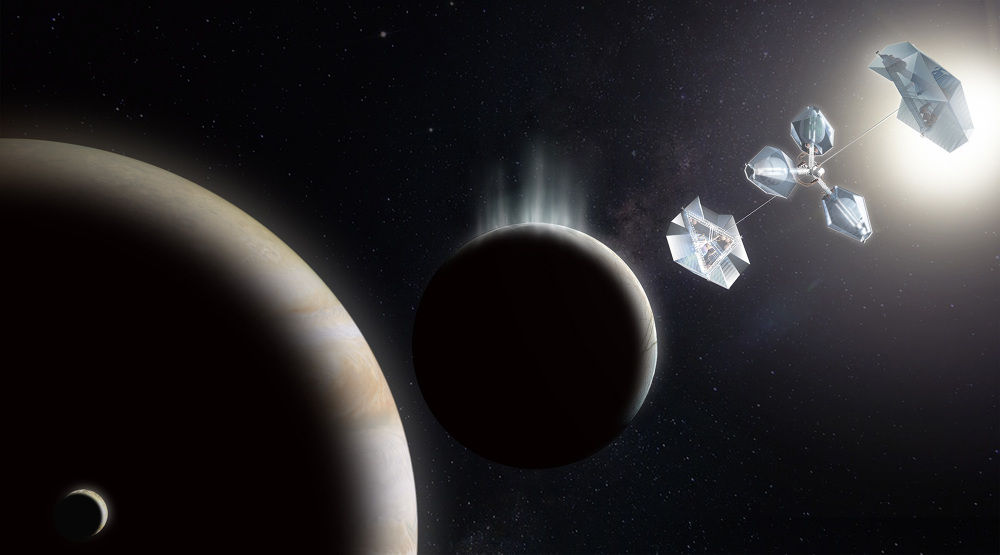
Credit: Clouds AO
Crew of six
In an update on their research, they note:
“The icy moons of Saturn and Jupiter are believed to have oceans of liquid water and are thus prime candidates for extra-terrestrial life. This proposal is for an interplanetary vehicle to house a crew of six on a long duration exploration of icy moons in the Jovian and Saturnian systems.
Inflatable elements
As detailed by Sono and Rudakevych, the vehicle is a low mass hybrid of rigid and inflatable structural elements. During interplanetary travel the vehicle is in a compact state allowing for induced gravity from rotation. Inhabited pods would spin about a central axis generating 1 G of centrifugal gravity.
“The concept consists of three pressure vessels surrounded by transparent and translucent water ice for radiation shielding and views out. When the vehicle reaches a target moon it would stop spinning and park in an L1 spot (stable Lagrange Point),” the researchers note.
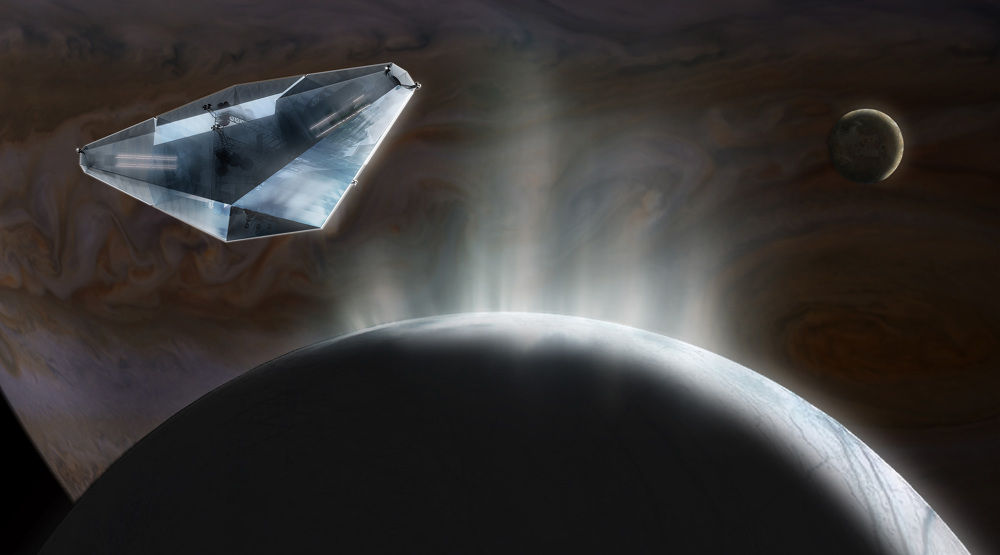
Credit: Clouds AO
Lowered via tether
From there, the habitat and surface modules would be lowered on a tether from the supporting counterweight at L1.
“The tethered expansion of the units allows for slow and steady analysis of atmospheric conditions on the way down to the surface. At its extreme limit the explorer module is able to touch down on the surface and take samples or harvest water ice,” they explain.
Credit: Clouds AO
The system can run indefinitely since it can recharge its supply of propellant by electrolyzing water. The unlimited supply of fuel allows for more flexibility in mission planning and adjustments based on findings by the human crew.
Be advised that this idea is filed at Clouds Architecture Office as speculative, space, architecture.
Go to this video at:
Curiosity Navcam Left B image acquired on Sol 1730, June 18, 2017.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is performing science duties, now in Sol 1732 operations.
The robot continues to wheel towards Vera Rubin Ridge, reports Mark Salvatore, a planetary geologist and a Curiosity participating scientist and faculty member at Northern Arizona University.
“Curiosity continues to make progress along its planned ascent route up Mt. Sharp, and is quickly approaching the hematite-bearing Vera Rubin Ridge,” Salvatore explains.
Courtesy: Abigail Fraeman.
Signatures of hematite
“As a refresher, Vera Rubin Ridge is a high-standing unit that runs parallel to and along the eastern side of the Bagnold Dunes. From orbit, Vera Rubin Ridge has been shown to exhibit signatures of hematite, an oxidized iron phase whose presence can help us to better understand the environmental conditions present when this mineral assemblage formed,” Salvatore points out.
Courtesy: Abigail Fraeman.
Large rocky slab
Last weekend, the robot drove approximately 105 feet (32 meters) and parked in front of a large rocky slab that’s nearly the size of a large dining room table. Smaller rocky patches are nearby, “perfect for our continued documentation of the local bedrock,” Salvatore adds.
This rocky slab will be extensively imaged using Curiosity’s Mastcam. In addition to imaging, three rocky targets will be chemically analyzed by the rover.
Bedrock chemistry
“Pierce Head” represents a piece of the Murray formation and will be investigated using the rover’s Chemistry and Camera (ChemCam) and the Alpha Particle X-Ray Spectrometer (APXS), as well as the Mars Hand Lens Imager (MAHLI) for context imaging.
Curiosity Front Hazcam Right B image taken on Sol 1730, June 18, 2017.
Credit: NASA/JPL-Caltech
Doing so, Curiosity can fully characterize the bedrock chemistry at its current location.
Alternatively, “Mosely Point” and “Leland Point” appear darker in tone, Salvatore adds, and exhibit slightly rougher and smoother textures, respectively, and will be investigated using only ChemCam.
Rough terrain
After these analyses, the robot is slated to set off on another drive over rough terrain to the east, where the rover will document its surroundings using its automated ChemCam targeting capabilities and its suite of cameras.
“In particular, the rover will turn its cameras to Vera Rubin Ridge for another suite of high resolution color images, which will help to characterize any observed layers, fractures, or geologic contacts,” Salvatore notes. “These observations will help the science team to determine how Vera Rubin Ridge formed and its relationship to the other geologic units found within Gale Crater.”
Curiosity Mars Hand Lens Imager (MAHLI) image from Sol 1730 June 18, 2017. MAHLI is located on the turret at the end of the rover’s robotic arm
Credit: NASA/JPL-Caltech/MSSS
Deimos observation
Salvatore explains that “another super interesting observation” will be made during this planning period: an opportunistic nighttime astronomical observation of Mars’ smallest moon, Deimos, which will be imaged using Mastcam.
Even though Deimos is only roughly 8 miles in diameter, Mastcam’s resolution and pointing capabilities make these observations seem routine. “Imaging Mars’ moons allow scientists to better understand the evolution of their orbits over time,” Salvatore adds.
Restricted planning
Curiosity researchers are currently in a phase of “restricted planning,” where the offset in time between the Earth and Mars prohibits the ability to downlink data with sufficient time to plan on a daily basis. So, the science and engineering teams have planned two days’ worth of rover activities.
“We will reconvene on Wednesday to produce a similar two-day plan, and will do so through next week,” Salvatore concludes, assuring that Curiosity is busy as it continues its journey up Mt. Sharp.
Credit: Asteroid Day
Hundreds of events in multiple countries are slated to take place on June 30 – the anniversary of Earth’s largest asteroid impact in recorded history: the 1908 Siberia Tunguska incident that flattened 770 square miles (2,000 square kilometers) of forest in Siberia, Russia.
Events for Asteroid Day 2017 are being planned on all five continents and include participation this year from major space agencies: European Space Agency (ESA); Japanese Space Agency (JAXA) and NASA.

Raise awareness
Asteroid Day was co-founded in 2014, by Brian May, astrophysicist and lead guitarist for the rock band Queen; Danica Remy, B612 President; Apollo astronaut Rusty Schweickart; and German filmmaker Grig Richters.
Last year, Asteroid Day was sanctioned by the United Nations as a global day of education to raise awareness about asteroids.
But there’s more, such as how our world can be rocked by asteroids and what can be done to protect humanity from dangerous impacts and facilitate future exploration.

Credit: Asteroid Day
Global conversation
As a unique element to Asteroid Day, there’s a first ever 24-hour live broadcast about the asteroid threat. Produced from the new Broadcasting Center Europe (BCE) studio at RTL City, Luxembourg, the June 30 program will serve as a platform for the first global conversation about asteroids.
Resources
Go to this informative and fact-packed website at:
A full list of all the events can be found at:
https://asteroidday.org/event-guide/
Check out this interview with Brian May at:
https://asteroidday.org/page/brian-may/
Also, go to:
TWITTER: @asteroidday #AsteroidDay, #AsteroidDayLive;
FACEBOOK: www.facebook.com/AsteroidDay #AsteroidDay, #AsteroidDayLive
YOUTUBE: www.youtube.com/user/asteroidday

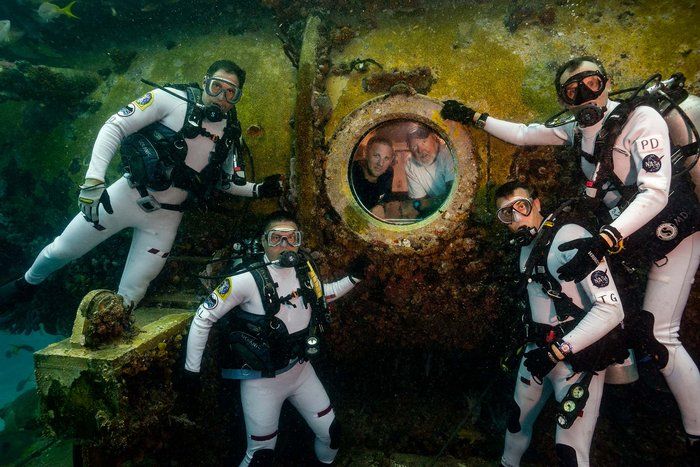
NEEMO 22 dive.
Credit: NASA
Credit: NASA
The 22nd NASA Extreme Environment Mission Operations (NEEMO) mission is underway, an underwater analog exercise to train for spaceflight without leaving Earth.
Six aquanauts took a dive of some 65 feet (20 meters) to the sea floor where they will spend 10 days living and working below the waves. They are now on board the Aquarius underwater habitat off the coast of Florida.
The habitat acts as a makeshift “space base” for the aquanauts to make regular “waterwalks” in full scuba gear and, by adjusting their buoyancy, they can simulate the gravity levels found on the Moon, Mars or asteroids.
The crew taking part in NEEMO 22, the 22nd NASA Extreme Environment Mission Operations mission.
Credit: NASA
Exploration tasks
NASA astronaut Kjell Lindgren will be commander for this mission that will focus on exploration spacewalks as well as tasks based on the International Space Station. He is joined by ESA astronaut Pedro Duque, planetary scientist Trevor Gradd and research scientist Dom D’Agostino, along with two support technicians.
To follow the 22nd NEEMO mission without getting wet, go to this link at:

