Author Archive

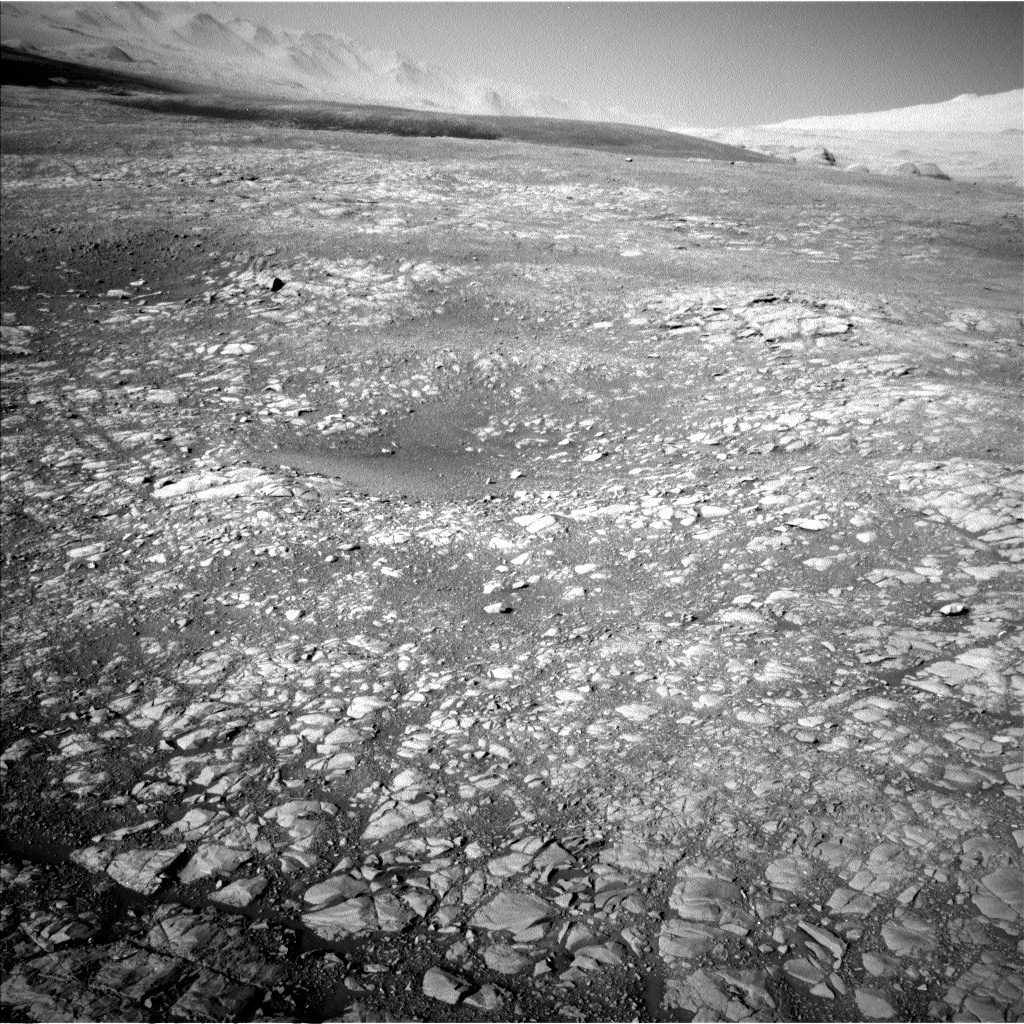
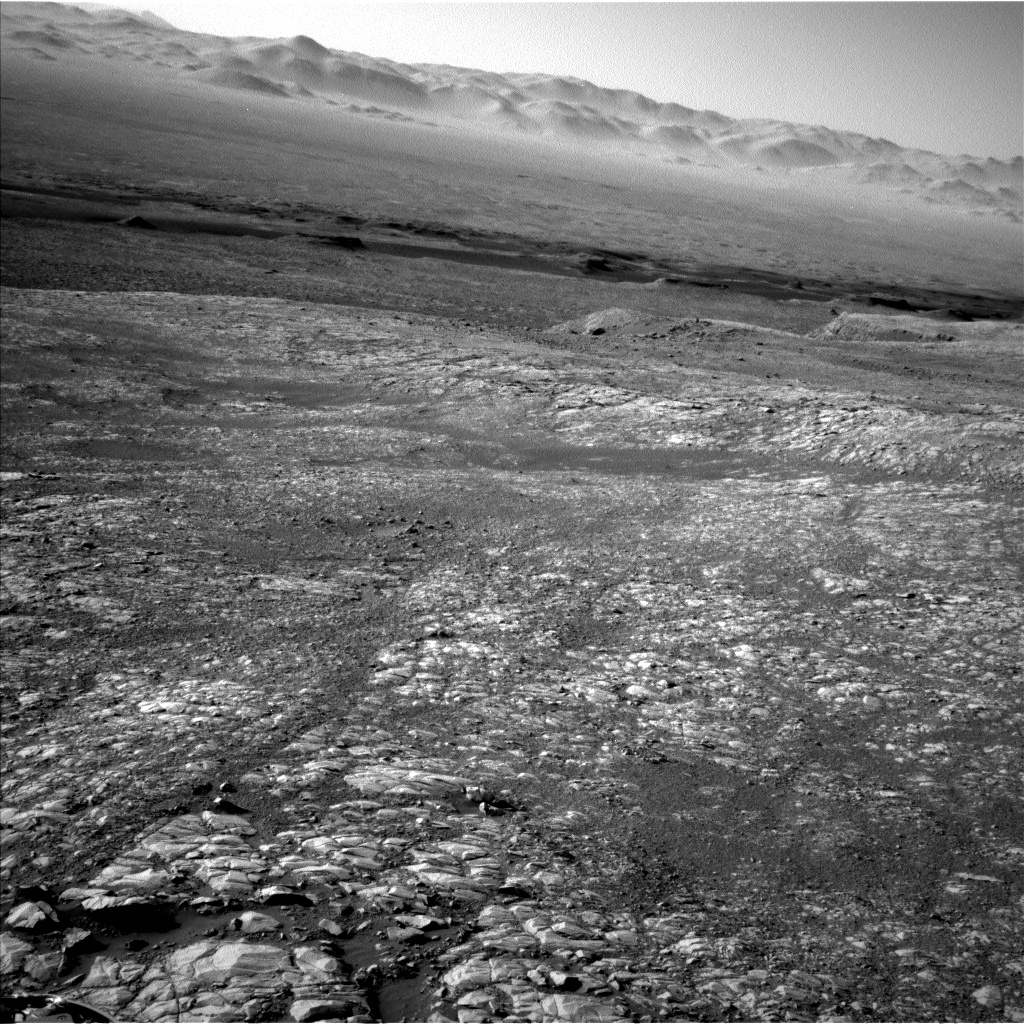
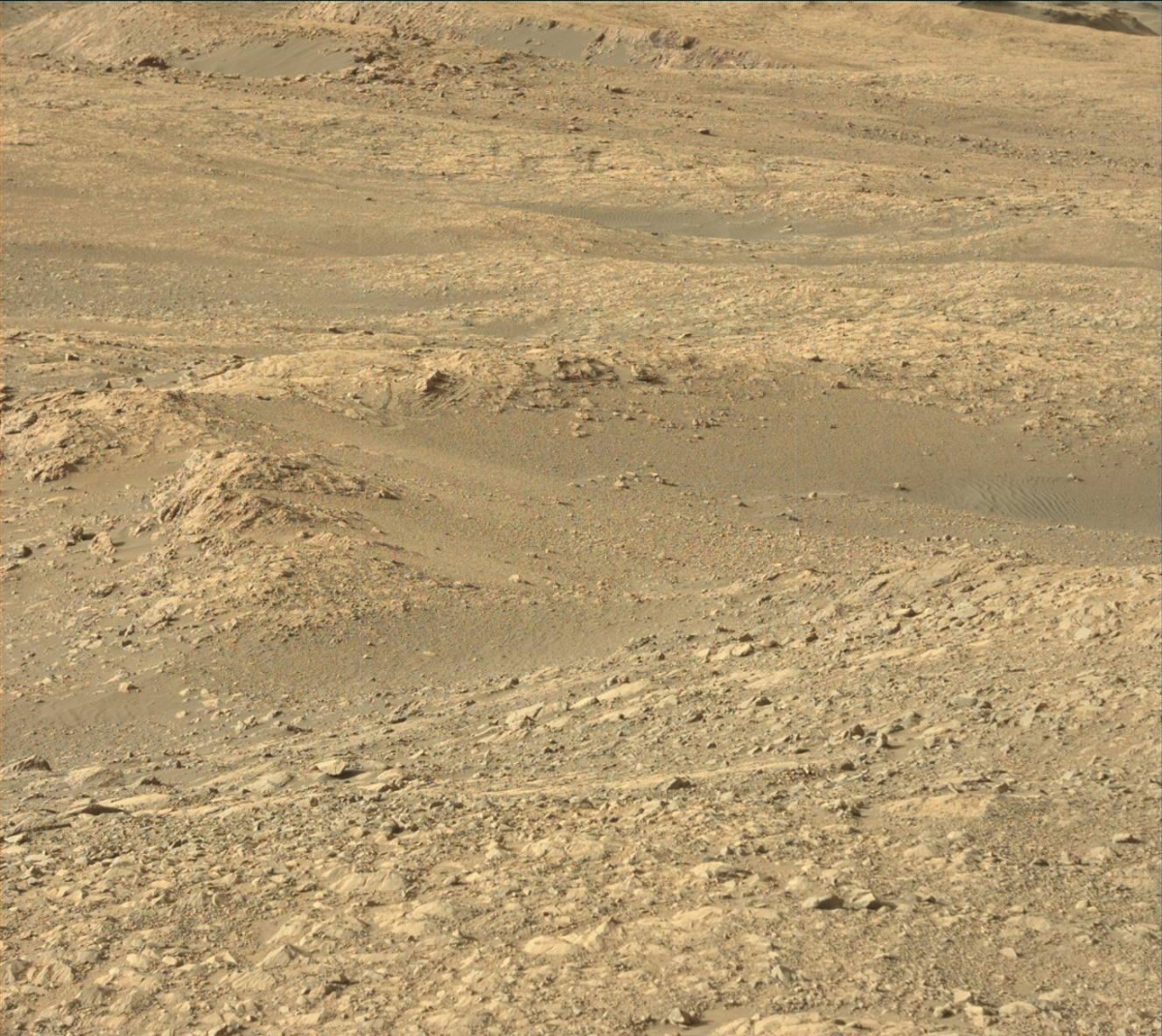
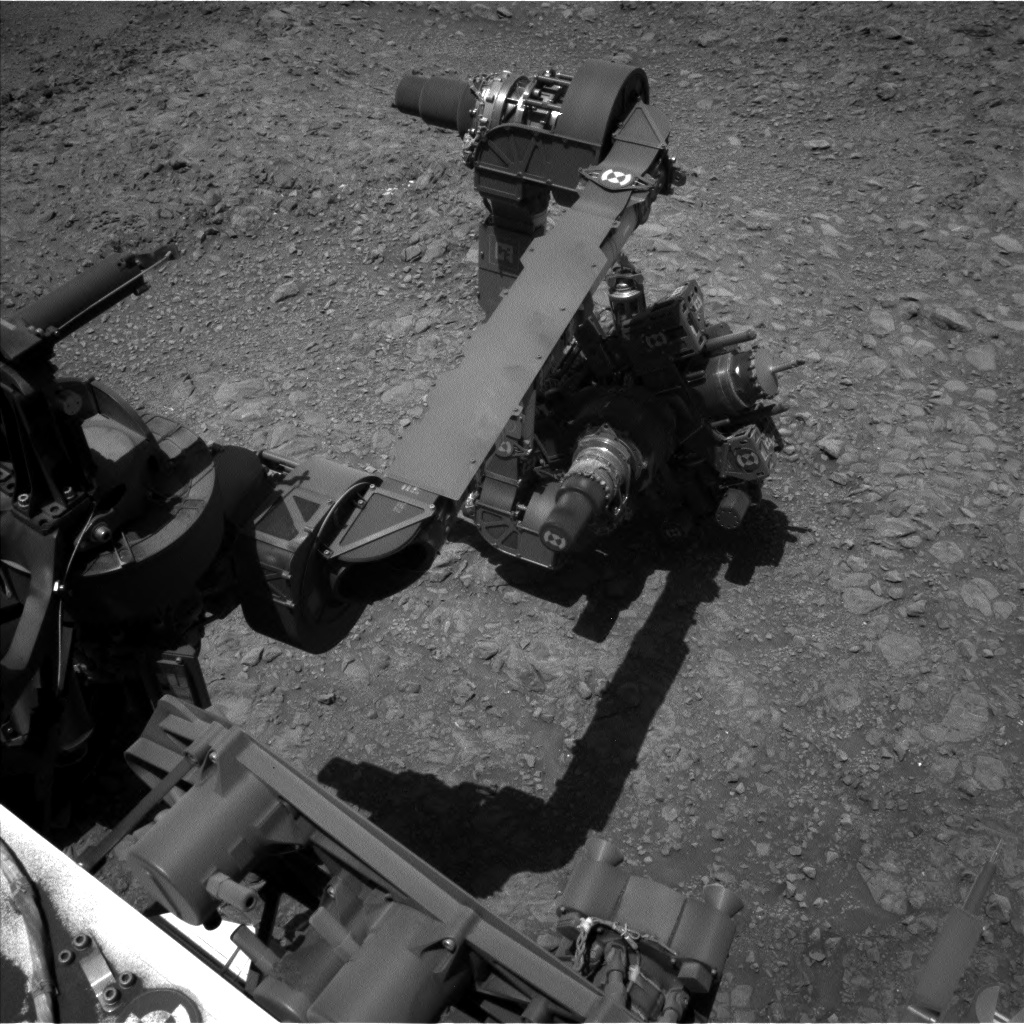
Curiosity Navcam Left B image acquired on Sol 1993, March 16, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover has just begun Sol 1995 operations on the Red Planet.
In a new report from Michelle Minitti, a planetary geologist at Framework in Silver Spring, Maryland: “The science team gave Curiosity a workout in this plan, using just about every watt of power available to carry out a full slate of activities.”
Minitti adds that Sol 1995 is scheduled to start off with a bang – three Chemistry and Camera (ChemCam) rasters and a Mastcam 360 mosaic!

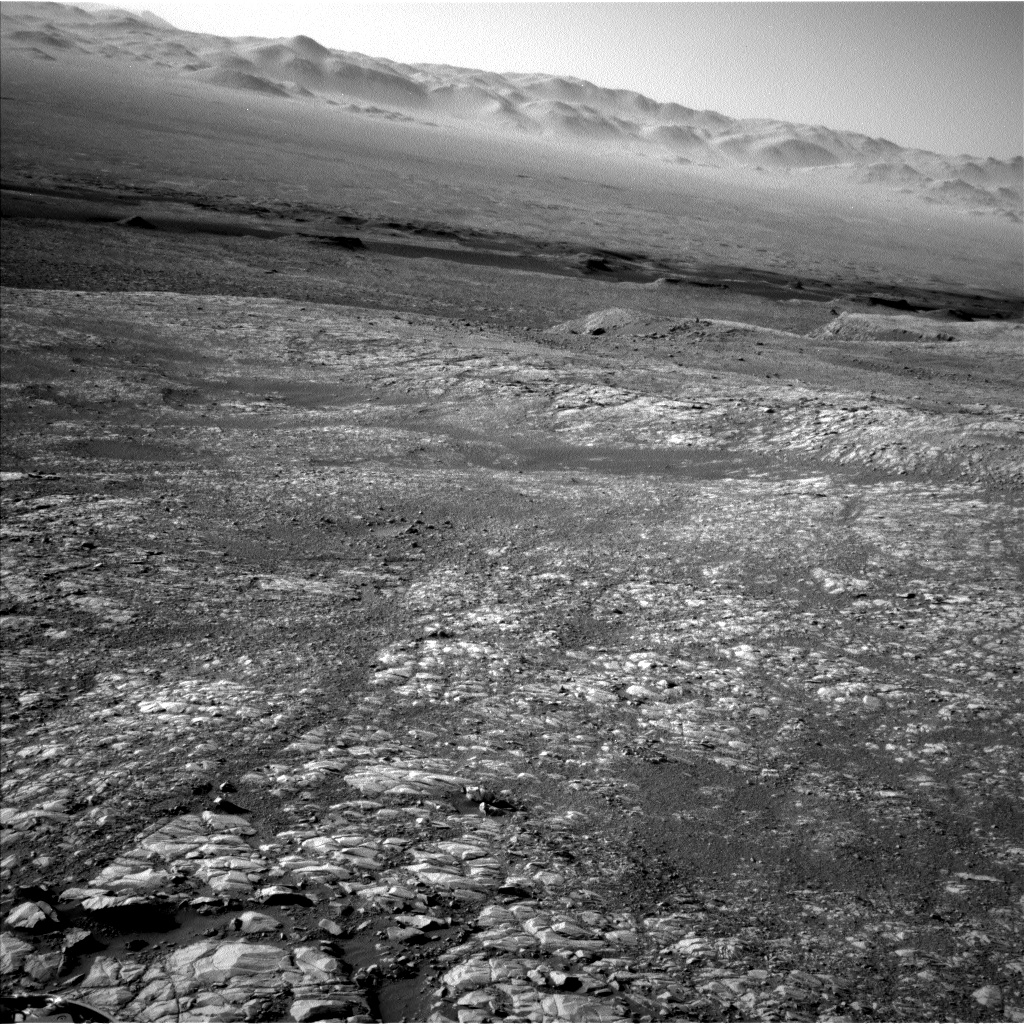
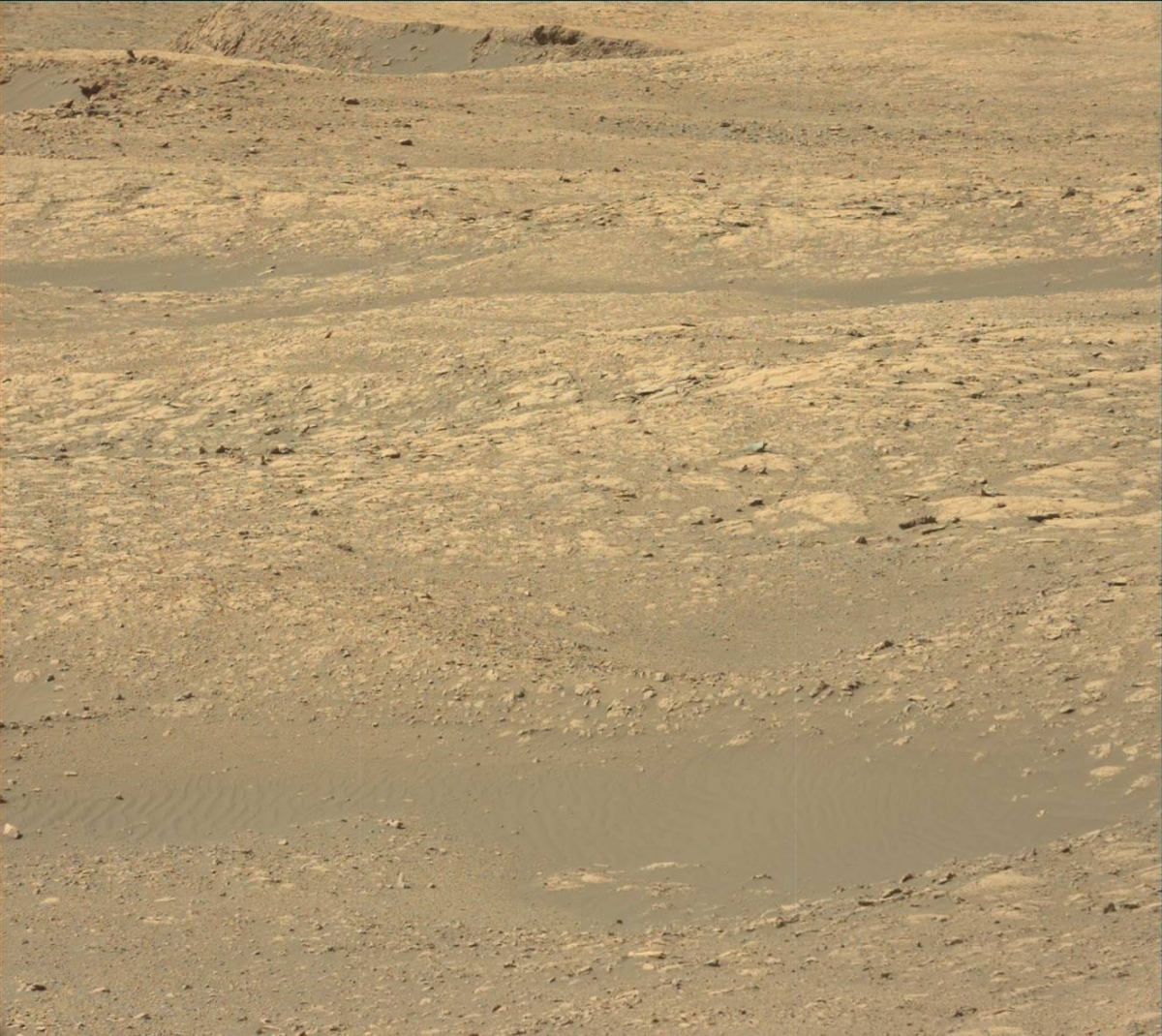
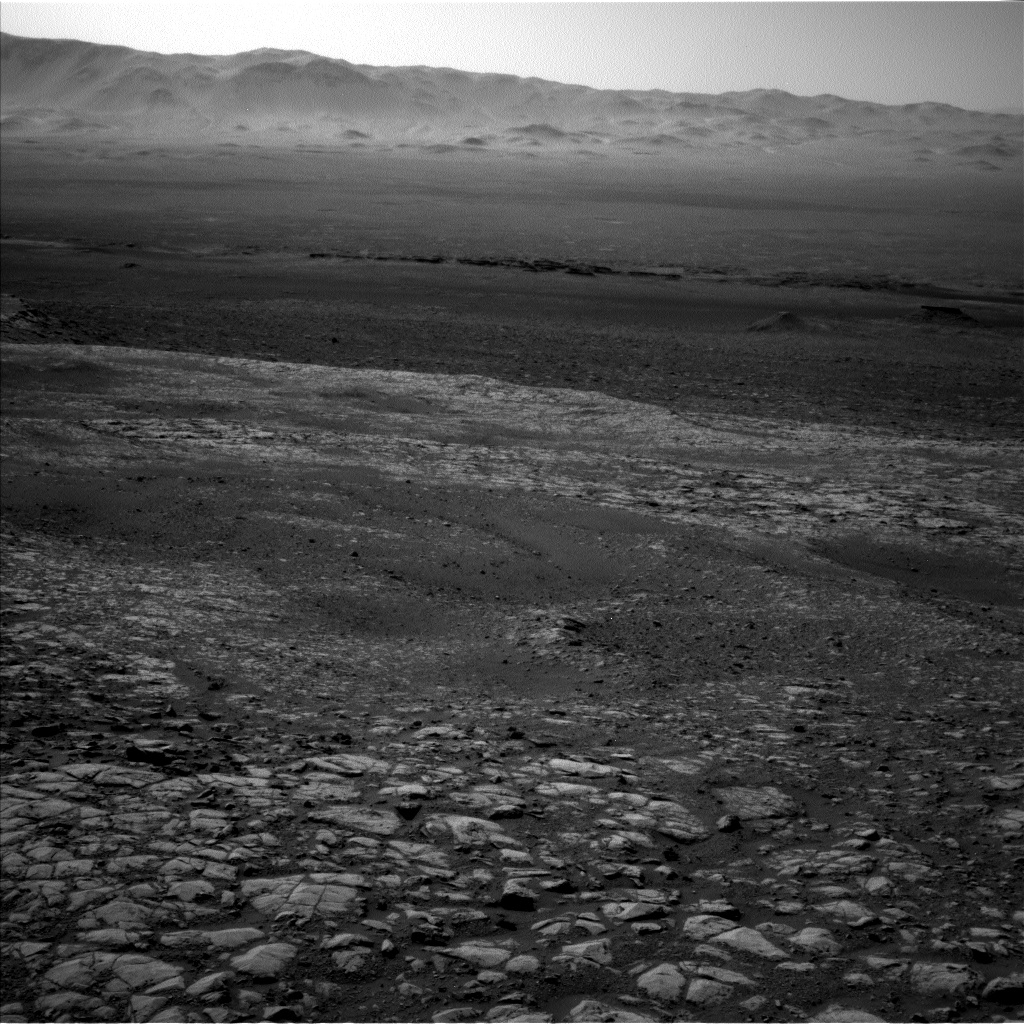
Curiosity Navcam Left B image taken on Sol 1993, March 16, 2018.
Credit: NASA/JPL-Caltech
Wind sculpted slab
ChemCam will first shoot “Durness,” a flat, gray, apparently wind sculpted slab of bedrock in the workspace.
Next up for ChemCam is “Paisley,” a faceted cobble of bedrock cut by sulfate veins, and last is “Fingals Cave,” a bright white exposure of sulfate vein.
“The arm instruments get to work next,” Minitti notes.
Target brushing
The robot’s Mars Hand Lens Imager (MAHLI) will image Durness, which will show the ChemCam laser shots across the target, followed by a Dust Removal Tool (DRT) brushing of the target.
Curiosity Navcam Left B image acquired on Sol 1993, March 16, 2018.
Credit: NASA/JPL-Caltech
Curiosity’s Alpha Particle X-Ray Spectrometer (APXS) will analyze Durness and Paisley overnight, and then early in the morning of Sol 1996, MAHLI will return to Durness for more imaging on its now dust-cleared surface, Minitti points out.
MAHLI imaging of Paisley ends the arm work, and will capture the ChemCam raster spots and the areas cleared of dust by the ChemCam laser.
Curiosity Navcam Left B photo taken on Sol 1993, March 16, 2018.
Credit: NASA/JPL-Caltech
Hematite signal
“Before we drive on Sol 1996,” Minitti reports, “the rover will acquire Mastcam multispectral observations of the DRT spot on Durness and across the Vera Rubin Ridge in the direction of a particularly strong hematite signal seen from orbit that we are driving toward.”
After the drive, Curiosity will acquire two ChemCam observations using the Autonomous Exploration for Gathering Increased Science (AEGIS) automated targeting algorithm, and spend time observing the atmosphere.
Dust devils and clouds
Use of the robot’s Mastcam and Navcam is slated to produce images and movies that measure dust in the atmosphere and look for dust devils and clouds. Those activities are to take place both early in the morning and in the afternoon of Sol 1997.
APXS will acquire another Argon atmospheric measurement overnight on Sol 1997.
Regular Dynamic Albedo of Neutrons (DAN), Radiation Assessment Detector (RAD) and Rover Environmental Monitoring Station (REMS) measurements, Minitti concludes, “keep the rover working in those small windows where nothing else is going on!”
Credit: NASA/JPL-Caltech/Univ. of Arizona
Note that dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
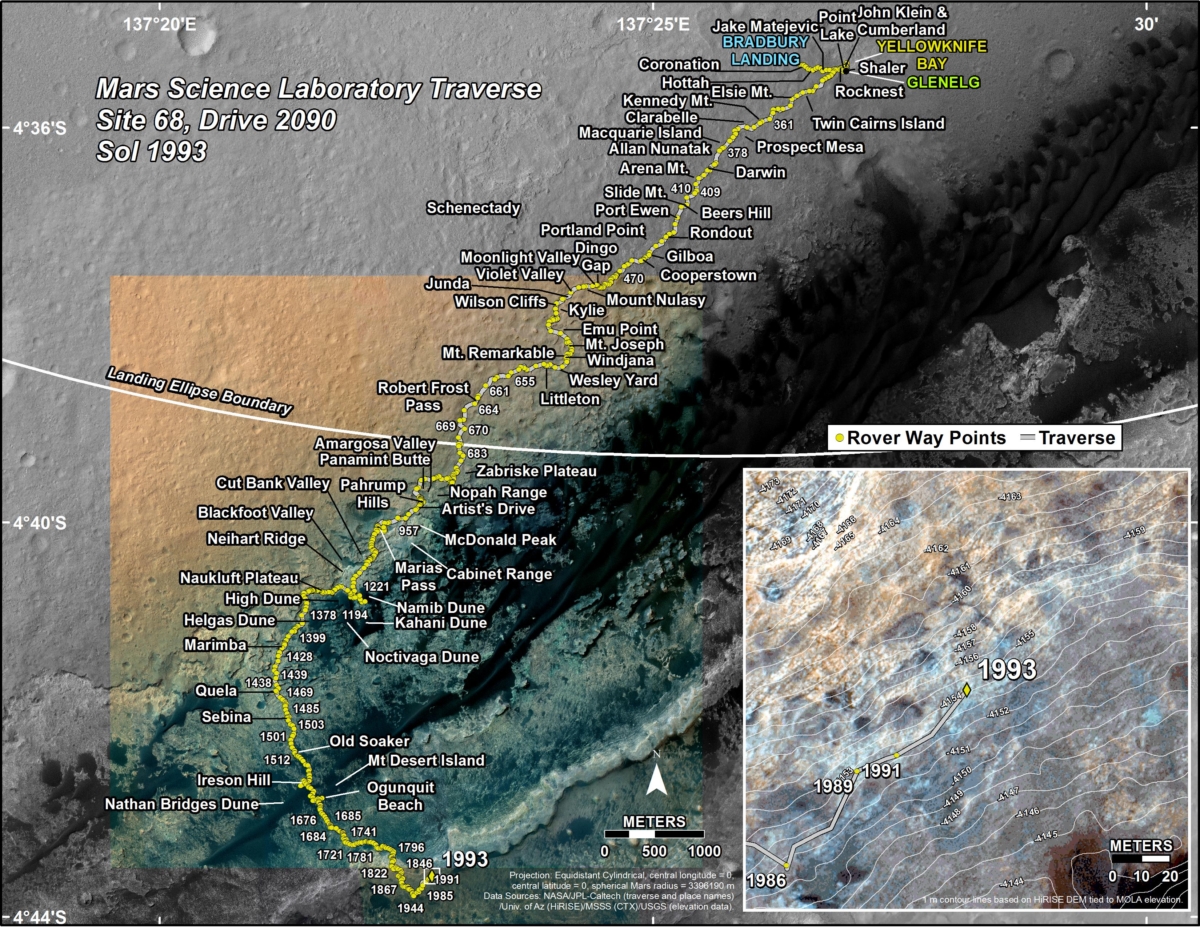
New map
Meanwhile, a new Curiosity traverse map through Sol 1993 has been issued.
The map shows the route driven by Curiosity through the 1993 Martian day, or sol, of the rover’s mission on Mars (March 16, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1991 to Sol 1993, Curiosity had driven a straight line distance of about 109.86 feet (33.48 meters), bringing the rover’s total odometry for the mission to 11.44 miles (18.40 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) onboard NASA’s Mars Reconnaissance Orbiter.

Artist’s concept of the soon to fall Tiangong-1 in Earth orbit.
Credit: CMSA
The European Space Agency’s Space Debris Office in Darmstadt, Germany has issued a new update on the expected reentry of China’s Tiangong-1 space lab.
In a March 15 issued forecast, the current estimated window is roughly March 30 to roughly April 6, noting that the prediction of the 8.5 ton spacecraft’s fall is highly variable.

Credit: ESA
Reentry of the Chinese hardware will take place anywhere between 43ºN and 43ºS (which includes, e.g. Spain, France, Portugal, Greece, etc., as well as many other regions and continents.

Credit: ESA
Areas above or below these latitudes can be excluded.
“At no time will a precise time/location prediction from ESA be possible,” the Space Debris Office explains.
Tiangong-1 is the first space station built by China and lofted in late September 2011. The first Chinese orbital docking occurred between Tiangong-1 and an unpiloted Shenzhou spacecraft on November 2, 2011. Two piloted missions were completed to visit Tiangong-1: Shenzhou 9 and Shenzhou 10.

Credit: ESA
Credit: Go Project Films
A new film focused on the Apollo 8 mission in 1968 is set to arrive on Earth Day 2018.
The world premier of Earthrise tells the story of the first image captured of the Earth from space in 1968.
Told solely by the Apollo 8 astronauts – Frank Borman, Jim Lovell, and Bill Anders — the film recounts their experiences and memories and explores the beauty, awe, and grandeur of the Earth against the blackness of space.
Iconic imagery
The iconic image from Apollo 8 had a powerful impact on the astronauts and the world, offering a perspective that transcended national, political, and religious boundaries.
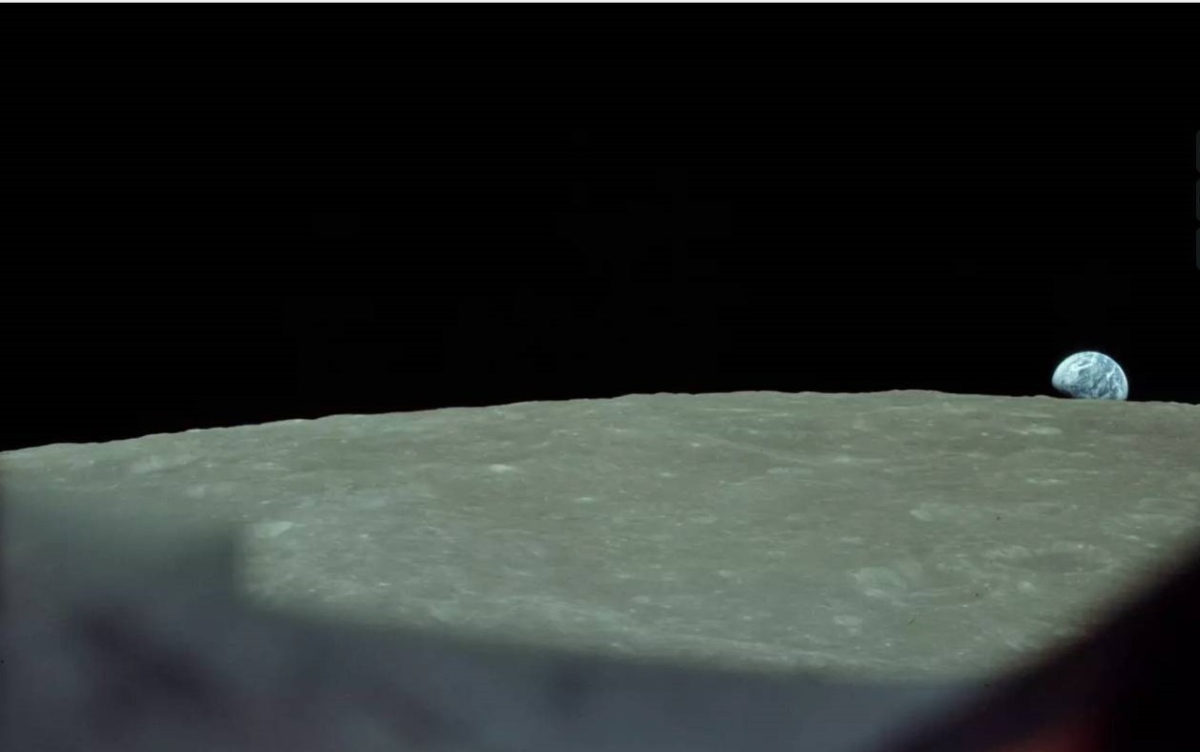
Credit: NASA
Told 50 years later, Earthrise compels us to remember this shift and to reflect on the Earth as a shared home.
Public screenings
Public Screenings of the 29-minute Earthrise are slated April 21, 24, 25, 28 during the Tribeca Film Festival 2018 being held in New York.
Go Project Films is the film production arm of the Global Oneness Project–the award-winning online multi-media educational platform.
Director of Earthrise is Emmanuel Vaughan-Lee, an award-winning filmmaker, musician and composer. His work has been featured on National Geographic, PBS, The New York Times, The New Yorker, The Atlantic, Outside Magazine, exhibited at The Smithsonian and screened at festivals worldwide.
Resources
To view a trailer of Earthrise, go to:
The festival’s page dedicated to Earthrise is available at:
www.tribecafilm.com/filmguide/earthrise-2018
For detailed information about the New York-based festival, go to:

Curiosity Front Hazcam Left B image acquired on Sol 1993, March 16, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 1994 science tasks.
Reports Michelle Minitti, a planetary geologist for Framework in Silver Spring, Maryland: “As we drive east across the top of Vera Rubin Ridge – backwards no less! – we encountered another nice patch of bedrock in Curiosity’s workspace.”
Curiosity Navcam Left B photo taken on Sol 1993, March 16, 2018.
Credit: NASA/JPL-Caltech
That encounter motivated multiple observations before the robot hits the road once again.
Small crystals
The bedrock in front of Curiosity resembled that which was studied on Sol 1991 where the rover imaged the target “Seaforth Head” – that target exhibits small crystals like the ones found at the “Jura” outcrop, “and we hoped that today’s workspace might turn up more crystals,” Minitti adds. “To look for them, we planned a Mastcam M100 mosaic over a wide swath of the workspace.”
Coordinated observations
A more detailed assessment of the bedrock will include coordinated observations of the gray bedrock target “Stirling Castle” with the robot’s Mars Hand Lens Imager (MAHLI), Alpha Particle X-Ray Spectrometer (APXS), and its Chemistry and Camera (ChemCam) instrument.

Curiosity Navcam Left B image acquired on Sol 1991, March 13, 2018.
Credit: NASA/JPL-Caltech
This target’s name also gave team members a chance to honor one of the rover planners operating the rover: Stirling Algermissen!
ChemCam was on tap to acquire a second raster on “Dunottar,” bedrock that is rough and reddish at its base and smooth and gray at its top, Minitti explains.
Far away targets
ChemCam will be kept very busy imaging far away targets and the sky using overlapping Remote Micro Imager (RMI) photos of Peace Vallis. They will be acquired in an effort to combine them into a single image of higher resolution.
Curiosity Mastcam Left image taken on Sol 1991, March 13, 2018.
Credit: NASA/JPL-Caltech/MSSS
As was done on Sols 1986-1987, the rover will image the yardang unit on the flank of Mt. Sharp with two long distance RMI mosaics. “These mosaics will help us increase our understanding of the internal structure of this unit. Just as we often use ChemCam in passive mode to look at the spectroscopic signature of rocks around us, in this plan we will use that same mode to look at the sky,” Minitti points out.
Aerosols and trace gases
ChemCam passive observations of the sky allow Mars researchers to estimate concentrations of aerosols and trace gases in the atmosphere. To ensure the passive sky observation is well-calibrated, ChemCam will acquire passive spectra from the ChemCam calibration targets both before and after the sky observation.

Curiosity Mastcam Right photo taken on Sol 1991, March 13, 2018.
Credit: NASA/JPL-Caltech/MSSS
The atmosphere will get more attention after the rover drives roughly 115 feet (35 meters), with images to measure the amount of dust in the atmosphere and movies that seek out clouds.
Curiosity’s APXS will also get its turn, measuring the amount of atmospheric Argon as the turret remains stowed on the night of Sol 1994, Minitti concludes.

Concept of view from a deep space habitat.
Credit: ESA
NASA is pressing forward on a Lunar Orbital Platform-Gateway, a human-tended facility positioned near Earth’s moon.
Several hundred scientists in Denver February 27-March 1, taking part in a Deep Space Gateway Concept Science Workshop, proposing how best to utilize a strategic presence in cislunar space.

Location, location, location, location. Four Lunar Orbital Platform-Gateway Near Rectilinear Halo Orbit types, multiple revolutions in a rotating Earth-Moon frame.
Credit: NASA/JSC

Notional architecture for Lunar Orbital Platform-Gateway
Credit: NASA
Making use of a suite of instruments housed within and on the structure itself, or free-flying equipment stationed near the mini-complex, researchers foresee a host of uses for the Gateway: from performing Earth and solar observations to carrying out astrophysics and fundamental physics experiments as well as doing human physiology and space biology studies. Moreover, the Gateway is viewed as not only a place to live, learn and work around the moon but to also support an array of missions to the lunar surface.
For more on the Gateway, go to my newly posted Space.com story:
NASA Shapes Science Plan for Deep-Space Outpost Near the Moon
https://www.space.com/39985-nasa-lunar-orbital-platform-gateway-science-plan.html
Credit: House Armed Services Committee/Screengrab
Space Warfighting Readiness: Policies, Authorities, and Capabilities is a March 14 hearing held by the House Armed Services Committee.
In opening remarks, Rep. Mac Thornberry (R-TX), Chairman of the House Armed Services Committee noted: “First, space is a domain of warfare, not just an enabler. Second, we are falling behind where we should be when it comes to space. Today’s hearing will discuss how we can catch up.”
Thornberry added that “as we refocus our defense efforts on strategic rivals, it is clear that they are putting significant effort into space. I believe that the American people still do not fully realize how dependent our country is on space, not just for military and intelligence purposes, but in our every day lives as well. That dependence creates a vulnerability, which, like in the other domains, we must count on the American military to protect.”
Video of hearing: https://youtu.be/JRUgnT_EXCc
Credit: House Armed Services Committee/Screengrab
Witnesses
The witnesses and their written testimony:
- General Robert Kehler
Former Commander, U.S. Strategic Command
http://docs.house.gov/meetings/AS/AS00/20180314/107973/HHRG-115-AS00-Wstate-KehlerR-20180314.pdf
- Doug Loverro
Former Deputy Assistant Secretary of Defense for Space Policy, Department of Defense
Credit: House Armed Services Committee/Screengrab
http://docs.house.gov/meetings/AS/AS00/20180314/107973/HHRG-115-AS00-Wstate-LoverroD-20180314.pdf
- Todd Harrison
Director of Aerospace Security Project, Center for Strategic and International Studies

Credit: House Armed Services Committee/Screengrab
http://docs.house.gov/meetings/AS/AS00/20180314/107973/HHRG-115-AS00-Wstate-HarrisonT-20180314.pdf

Credit: Bryce Space and Technology (Cover art and background template by Phil Smith and Raphael Perrino, Bryce Space and Technology. [Images
used are credited to: NASA/SpaceX/Planet/Orbital ATK (spacecraft), and Phil Smith (PM-2; SpaceShipTwo).
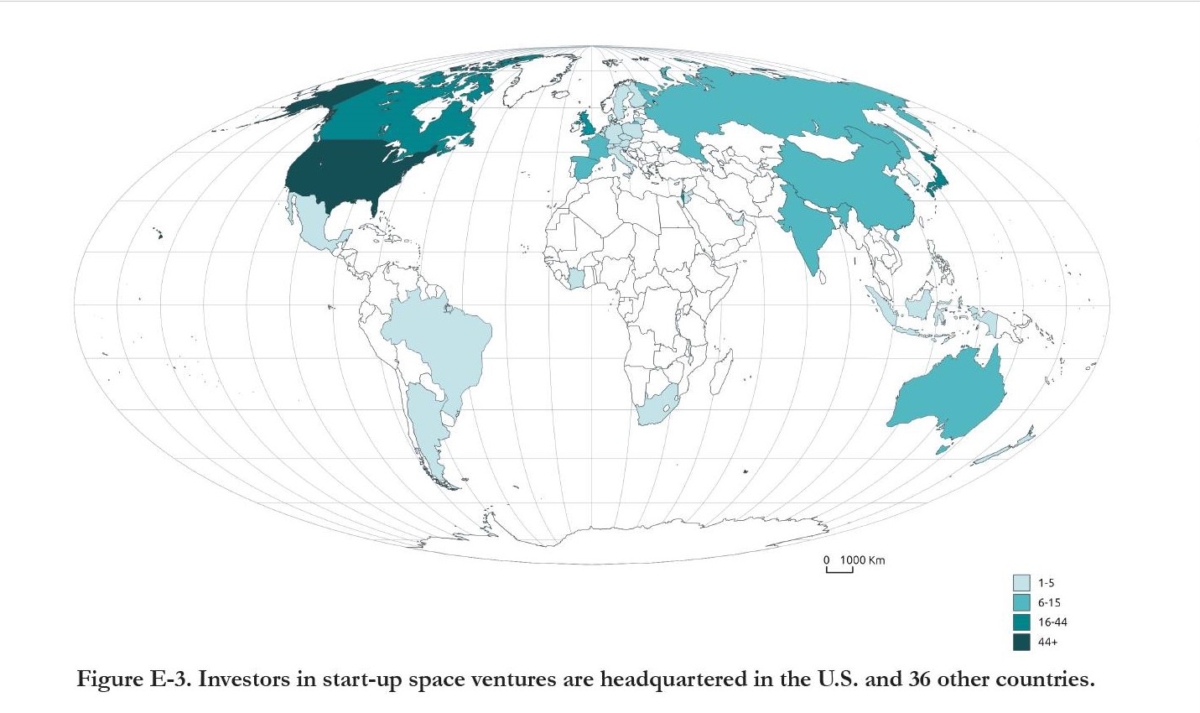
A new Start-Up Space report has been issued by Bryce Space Tech of Alexandria, Virginia.
This update on commercial space ventures in 2018 examines space investment in the 21st century and analyzes investment trends, focusing on investors in new companies that have acquired private financing.
Credit: Bryce Space and Technology
A few highlights:
$2.5 billion in 2017: historic number of companies reporting investment, more investors, and no billion dollar deals. Investors provided $2.5 billion of financing to start-up space companies in 2017, about $500 million less than in 2016.
Venture capital strong, growing VC interest in space. Total venture investment, nearly $1.6 billion, was about the same in 2017 as 2016.
Investors focus on valuations and exits. SpaceX is an undisputed space unicorn (a private company with a valuation of $1 billion or more); after a $450 million Series H, SpaceX’s valuation was reported at more than $20 billion.
Non-U.S. activity in a U.S. dominated sector. U.S. space start-ups continue to dominate start-up space, with about 75 percent of all investment (and 90 percent of seed and angel investment) from U.S. investors since 2015.
After a 10x increase in venture capital and seed investment in space start-ups from 2014 to 2015, investment has remained relatively steady from 2015 to 2017, totaling between $2.5 and $3 billion annually. In 2018, we will see milestones including smallsat launchers and human spaceflight.
The full report – and a host of previous reports –can be found on the Bryce website. Go to:

Credit: Astrobotic Technology, Inc.
It’s called CubeRover – a novel and new small rover platform for the Moon.
Astrobotic, in partnership with Carnegie Mellon University, has been selected by NASA for a Phase II Small Business Innovation Research (or SBIR) Award to develop this 4.4 pound (2-kilogram) rover platform capable of small-scale science and exploration on the Moon and other planetary surfaces.
“CubeRover stands to give more people access to the Moon than ever before,” said Andrew Horchler, principal investigator of the program at Astrobotic. “Countries and organizations without multi-billion-dollar budgets now have a means of exploring other worlds for the first time,” he said in an Astrobotic press statement.
Rapid development
In Phase II the team presses forward with a rapid, two-year development to deliver a flight-ready rover to NASA. The team intends to fly the first CubeRover on Astrobotic’s Peregrine lunar lander to the Moon in 2020.

Credit: Astrobotic Technology, Inc.
Headquartered in Pittsburgh, Pennsylvania, Astrobotic Technology, Inc. is a lunar logistics company established to deliver payloads to the Moon for companies, governments, universities, non-profits, and individuals.

Credit: Astrobotic Technology, Inc.
NASA catalyst
The company is an official partner with NASA through the Lunar CATALYST program, has 24 prior and ongoing NASA contracts, a commercial partnership with Airbus DS, a corporate sponsorship with DHL, 11 deals for its first mission to the Moon, and 130 customer payloads in the pipeline for upcoming missions, according to the group.
Curiosity Mastcam Left image acquired on Sol 1989, March 11, 2018.
Credit: NASA/JPL-Caltech/MSSS
NASA’s Curiosity Mars rover is now carrying out Sol 1991 science duties.
Reports Ryan Anderson, a planetary geologist at the USGS in Flagstaff, Arizona:
“After a successful weekend plan, the team decided that for the sol 1991-1992 plan, we would trade a longer-distance drive in favor of some ‘touch and go’ contact science. This ensures that we have a good record of the variations in chemistry and rock texture as we drive along the Vera Rubin Ridge.”
Drive ahead
The plan starts with a short Alpha Particle X-Ray Spectrometer (APXS) observation of the target “Seaforth Head” along with Mars Hand Lens Imager (MAHLI) photos of the same target.
Curiosity Navcam Left B image taken on Sol 1989, March 11, 2018.
Credit: NASA/JPL-Caltech
Anderson adds that the robot’s Chemistry and Camera (ChemCam) and Mastcam also join in the fun, analyzing Seaforth Head as well as the target “Canisp.”
After those observations are finished, Curiosity will drive about 50 feet (15 meters) and collect the usual post-drive images.
Curiosity Navcam Left B image taken on Sol 1989, March 11, 2018.
Credit: NASA/JPL-Caltech
Nice vantage point
The plan for Sol 1992, calls for an untargeted science block full of ChemCam activities.
“ChemCam will use autonomous targeting to analyze a patch of bedrock, and then will observe the titanium calibration target,” Anderson notes. “After that, ChemCam will take advantage of the clear skies and nice vantage point,” he adds, on the top of the Vera Rubin Ridge, to do a big 10×2 Remote Micro-Imager (RMI) mosaic of part of the Peace Vallis fan.
“Mastcam will observe the same area with its right eye to provide color and context for the RMI. The plan wraps up with a Navcam movie to watch for clouds,” Anderson concludes.

Curiosity Navcam Left B image acquired on Sol 1989, March 11, 2018.
Credit: NASA/JPL-Caltech
Atmospherics
In an earlier report, Anderson pointed out that Sol 1990 was dedicated to lots of atmospheric observations. “Mastcam has some observations of dust in the atmosphere in the early morning and early afternoon, and Navcam will watch for clouds at those times as well. Navcam also has some early morning observations of the atmospheric ‘phase function’: basically, how bright the sky is at different angles from the sun. Navcam will also watch for dust devils in the afternoon.”

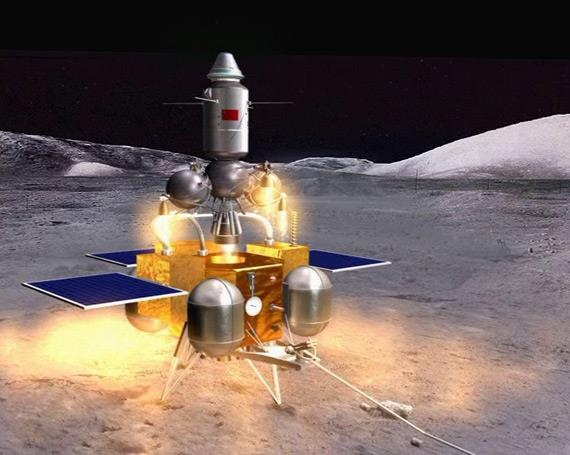
Chang’e-4 Moon lander and rover. Image credit: Chinese Academy of Sciences
For the first time, the Moon’s far side will be on the receiving end of a robotic lunar lander – China’s Chang’e-4.
Zhao Xiaojin, secretary of the CPC (Communist Party of China) committee at the China Aerospace Science and Technology (CAST), explains that the two-phase Chang’e-4 mission is being readied for launch in the first and second half of this year.

Earth-Moon L2 relay link.
Credit: CNSA
Relay satellite
“In the first half of 2018, we will first launch a relay satellite to Lagrange L2 Point, where the satellite can keep communication with both the far side of the Moon and the Earth. Therefore, we can control the lunar probe for data transmission using this relay satellite,” Zhao told China Central Television (CCTV) earlier this month.
Launch of the far side Chang’e-4 lunar lander is slated for the second half of 2018. It will not only do a soft landing on the far side of the Moon, “but also conduct in-situ and patrol exploration at the landing site,” Zhao said.
Steep and vertical landing
China’s Chang’e-4 lunar probe was the backup of the Chang’e-3 lunar probe which successfully landed on Moon in 2013, dispatching a lunar rover.
Zhao told CCTV that the landing mode and working condition of the Chang’e-4 lunar probe are very different from the Chang’e-3 lunar probe.
“Chang’e-3 lunar probe used a slow and arc-shaped landing, while as for Chang’e-4 lunar probe we have to adopt a steep and almost vertical landing,” Zhao explained. “Chang’e-4 lunar probe will have huge improvements on its capabilities because we have adopted new technologies and new products. For example, Chang’e-3 lunar probe could not work during the night, but Chang’e-4 lunar probe can do some measurement work at night,” Zhao added.

Group shot…China’s Chang’e 3 lander and Yutu rover.
Credit: Chinese Academy of Sciences
Track record
The Chang´e-3, named after a Chinese lunar goddess, was China’s first spacecraft to make a soft landing on the Moon. It consisted of a lander and a moon rover called “Yutu” (Jade Rabbit).
The Chang´e-3 mission was labeled as the second phase of China´s lunar program, which includes orbiting, landing and returning to Earth lunar samples. It follows the success of the Chang´e-1 and Chang´e-2 missions in 2007 and 2010.
Exploration of polar regions
Last year, Pei Zhaoyu, deputy director of the Lunar Exploration and Space Program Center with the China National Space Administration (CNSA) told attendees at the 7th IAA-CSA Conference on Advanced Space Technology that China will implement three missions in the polar regions of the Moon and set up scientific research stations there to offer a platform for future lunar probes.
“We will carry out three missions at the Moon’s polar regions to research the geological structure and mineral composition of its south pole and we will take samples back from the Moon during one of these missions. By building scientific research stations on the Moon, we want to provide a platform for larger scale and more rich lunar probe activities in the future,” Pei told CCTV.
China’s Chang’e 5 lunar sample return mission was on the books for 2017.
Via China Space website
Sample return
China’s blossoming robotic Moon exploration agenda did suffer a setback last year due to a July launch failure of the country’s most powerful rocket on its second flight, the Long March 5. That heavy-lifter is needed to hurl China’s Moon sampling and return to Earth mission.
For more information on the repercussions of that booster issue, go to:
China’s Delayed Moon Mission Sparks Debate over Lunar Samples
The Chang’e 5 spacecraft could return invaluable new moon rocks to Earth, but who will get to study them?
Also, go this Gallery Military video on the Chang’e-4 mission:

