Author Archive
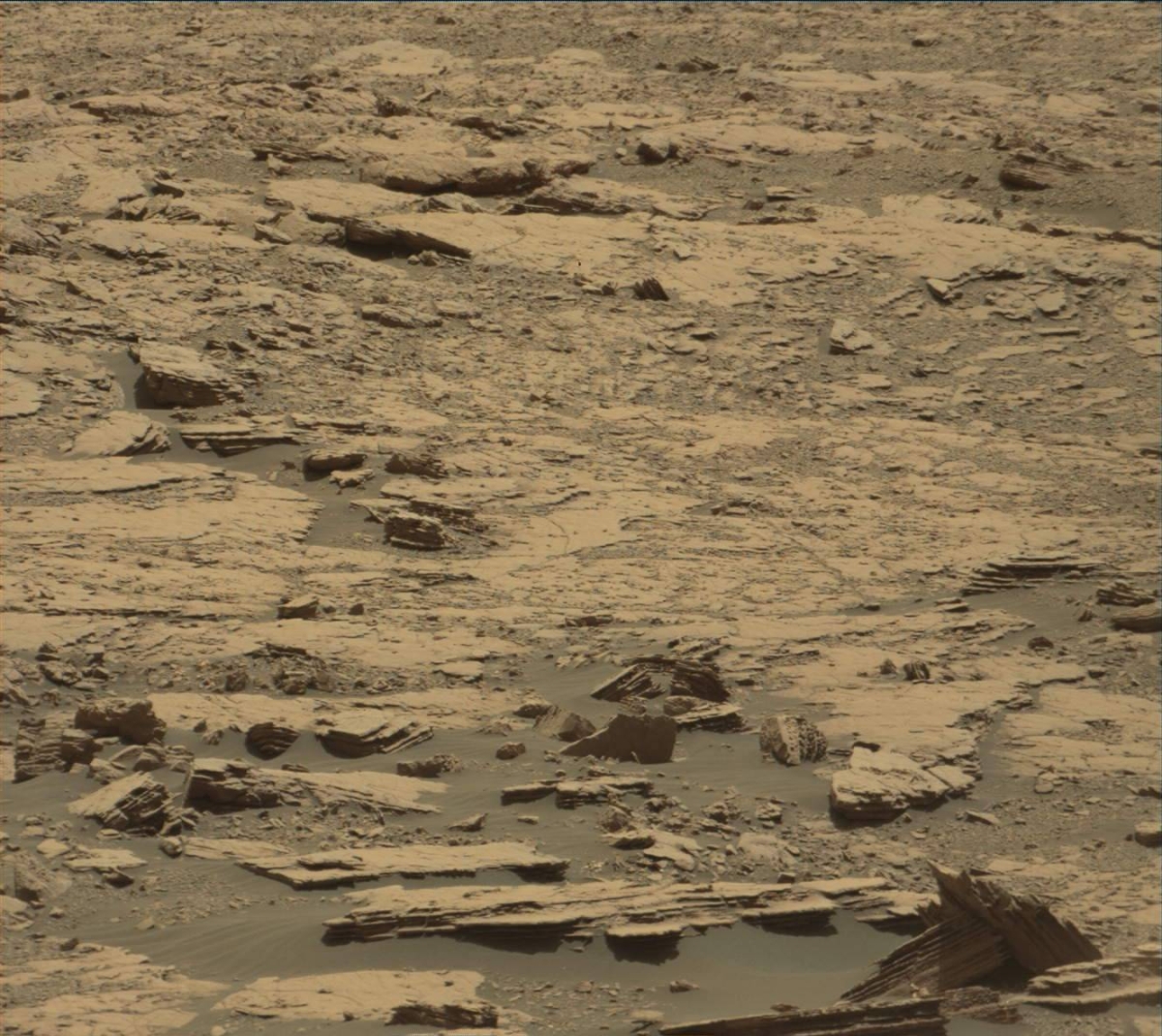
Curiosity Front Hazcam Right B image acquired on Sol 2000, March 23, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is wrapping up Sol 2001 duties.
Controllers operating the robot put together Sol 2001 activities listening to a rousing rendition of “Also sprach Zarathustra” – the signature song from the movie 2001: A Space Odyssey.
Reports Abigail Fraeman, planetary geologist at NASA/Jet Propulsion Laboratory (JPL) in Pasadena, California, that inspirational music motivated them to pick two new target names that were as close to A Space Odyssey as they could get: “Boddam” for David Bowman (the mission commander of the Discovery 1) and “Kirkcudbright” for the movie’s director, Stanley Kubrick.

Curioisty Navcam Left B photo acquired on Sol 2000, March 23, 2018.
Credit: NASA/JPL-Caltech
Steep outcrop
“Curiosity is currently sitting in front of a steep outcrop that shows some interesting geologic relationships between rocks in the Vera Rubin Ridge. We acquired some great images of these rocks,” Fraeman notes, so the focus has been on understanding the properties of those rocks.

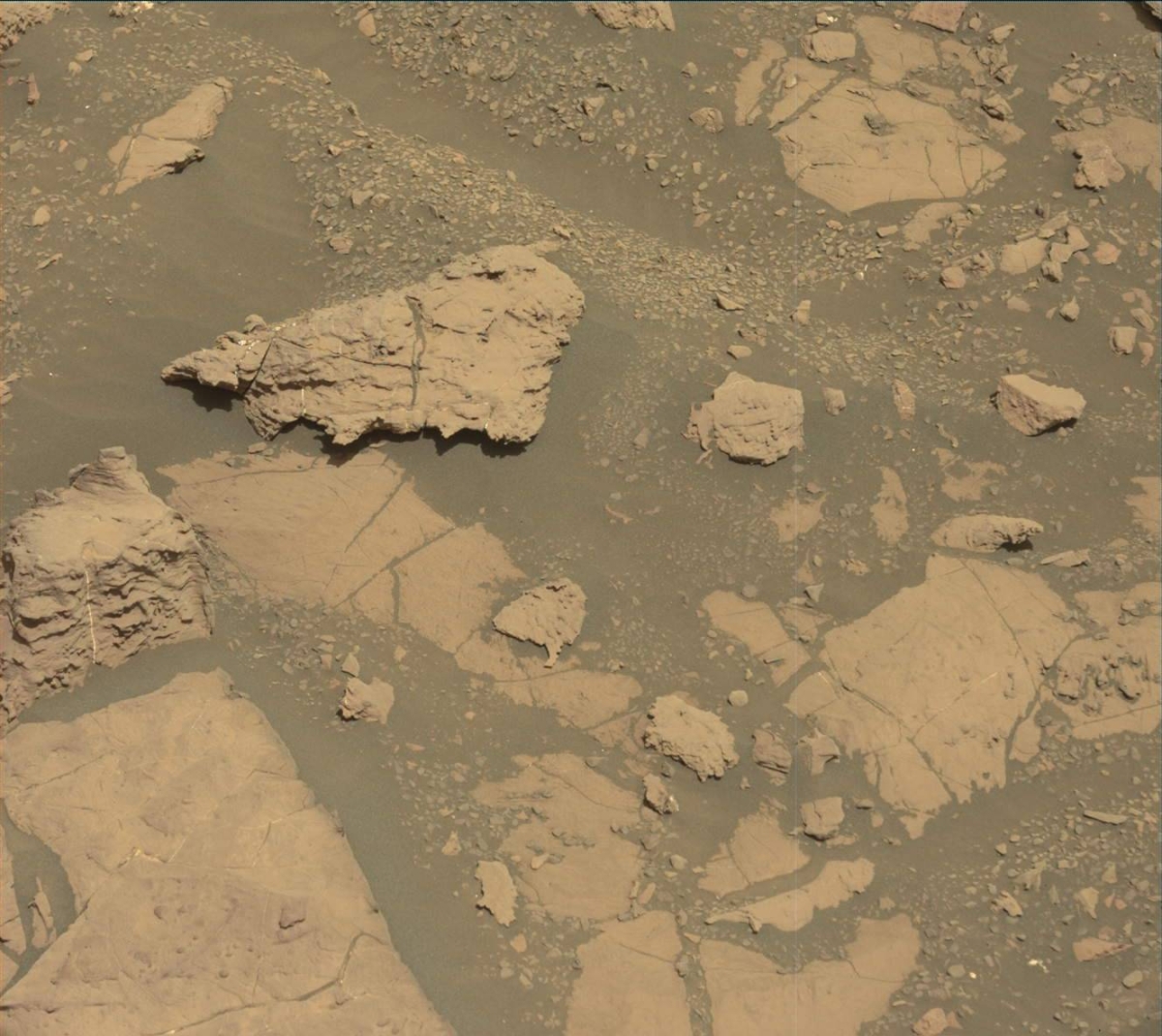
View of rover’s workspace taken by Curioisty Mastcam Left on Sol 1999, March 22, 2018.
Credit: NASA/JPL-Caltech/MSSS
In the first sol of the plan, sol 2001, the plan called for collecting Mars Hand Lens Imager (MAHLI) photos of a target named “Apin,” and doing Dust Removal Tool (DRT), MAHLI, and Alpha Particle X-Ray Spectrometer (APXS) tasks on a target named “Brora.”
Vertical rocks
The second sol, sol 2002, will focus on remote sensing, with Chemistry and Camera (ChemCam) observations on targets named Boddam, “Sgurr of Eigg,” and Kirkcudbright.
The ChemCam observations will be accompanied by Mastcam documentation images. Multispectral observation of the DRT targets from Brora and Sgurr of Eigg are to be done, some multispectral images of the landscape in front of the rover, and some additional color images of vertical rocks in front of Curiosity to complement previously collected data.
“We’ll top off the science block with a dust devil movie and dust devil survey. We’ll stay up after dark on sol 2002 to collect additional nighttime MAHLI images of Appin and Brora,” Fraeman explains.

Dust Removal Tool (DRT) is viewed by Curiosity Mastcam Right camera. Image taken on Sol 2000, March 23, 2018.
Credit: NASA/JPL-Caltech/MSSS
Distant features
On sol 2003, the plans calls for taking dedicated environmental science measurements, including a tau to measure the dust in the atmosphere, a Navcam 360 sky survey, a Navcam zenith and suprahorizon movies, and a crater rim extinction image.
Also part of the plan is producing another ChemCam remote micro-imager (RMI) mosaic of distant features on Mt. Sharp.

Curiosity Navcam Right B image acquired on Sol 1999, March 22, 2018.
Credit: NASA/JPL-Caltech
Spectral signatures
Sol 2003 will finish with the robot driving roughly 165 feet (50 meters) towards an area “where we see some of the strongest spectral signatures of hematite on the ridge in orbital data,” Fraeman points out.
A standard set of post-drive images will be taken over the weekend to set Mars researchers up to characterize the new location in the sol 2004 plan.
“It will be very exciting,” Fraeman concludes, “to see the exact rocks that are the source of the orbital signature which helped us realize the importance of Vera Rubin Ridge over five years ago!”

Credit: The Aerospace Corporation/CORDS
The reentry of China’s Tiangong-1’s is being closely monitored by The Aerospace Corporation’s Center for Orbital and Debris Reentry Studies (CORDS).
Currently, the space station is predicted to reenter Earth’s atmosphere around April 1, 2018, plus or minus 4 days.

Credit: The Aerospace Corporation/CORDS
However, due to the uncertainties involved, it is very difficult to predict the exact timing of any space object reentry.
Sources of uncertainty
According to CORDS, sources of uncertainty include:
- significant variation in the density of the upper layers of the atmosphere
- orientation of the spacecraft over time
- physical properties of the spacecraft, including the exact mass and material composition
- exact location and speed of the space station
“When aggregated, these factors translate into a reentry timing uncertainty that is roughly 20 percent of the “time to go”—the time remaining between the date of the prediction and the predicted date of reentry,” notes a CORDS update.

Credit: The Aerospace Corporation/CORDS
Surviving debris
Tiangong-1 will reenter somewhere between the latitudes of 43° north and south, and any surviving reentry debris will most likely fall into an ocean.
“The odds of space debris hitting you are less than one in 1 trillion. Surviving debris from Tiangong-1 might be carrying or be comprised of toxic materials. CORDS experts advise that it is best to not touch any space debris or breathe in any vapors it may release,” according to the orbital debris and reentry study group.

Credit: The Aerospace Corporation/CORDS
Visibility conditions
What can a ground observer see?
Incandescent objects during this reentry may be visible and will likely last up to a minute or more, depending on time of day, visibility conditions, and the observer’s location.
Go to this informative video regarding the upcoming reentry, made available by The Aerospace Corporation/CORDS.
Go to:
Curiosity Front Hazcam Right B image acquired on Sol 2000, March 23, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity robot on Mars has reached 2000 Martian Days of Red Planet roving, reports Christopher Edwards, a planetary geologist at Northern Arizona University in Flagstaff.
“Our trusty Martian rover has spent 2000 sols exploring Gale Crater helping to unravel the geologic history preserved in the rocks,” Edwards explains. “We’ve observed a huge variety of past environments ranging from conglomerate rocks that indicate flowing surface water to mudstones that document a time when Gale crater contained an ancient lake.”

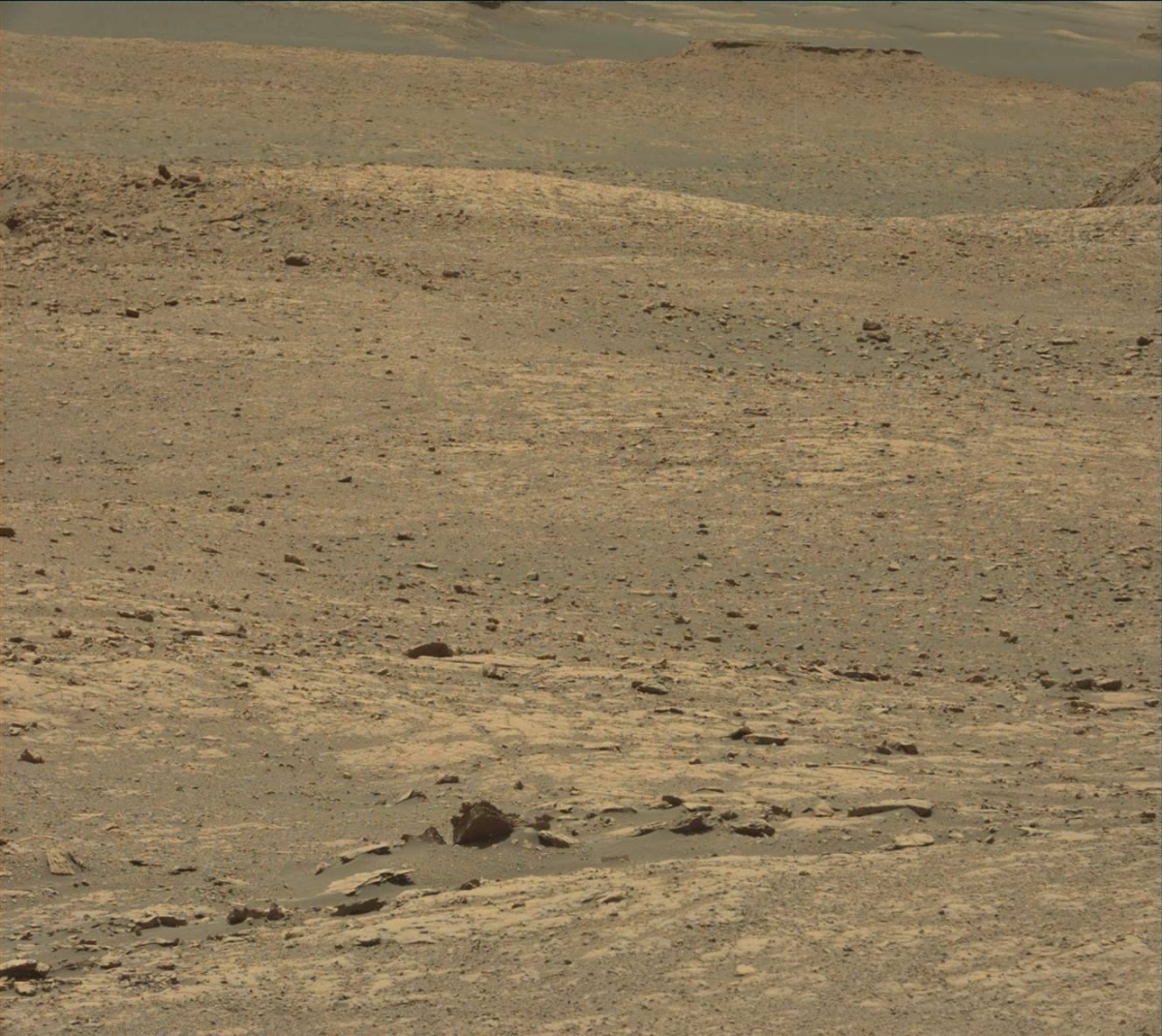
Curiosity Navcam Left B photo taken on Sol 2000, March 23, 2018.
Credit: NASA/JPL-Caltech
Strong signature
Curiosity is continuing its exploration of past environments preserved within Gale crater, further examining the Vera Rubin Ridge. The rover is continuing to make its way to the location where the strongest orbital signature of hematite is observed, Edwards notes.
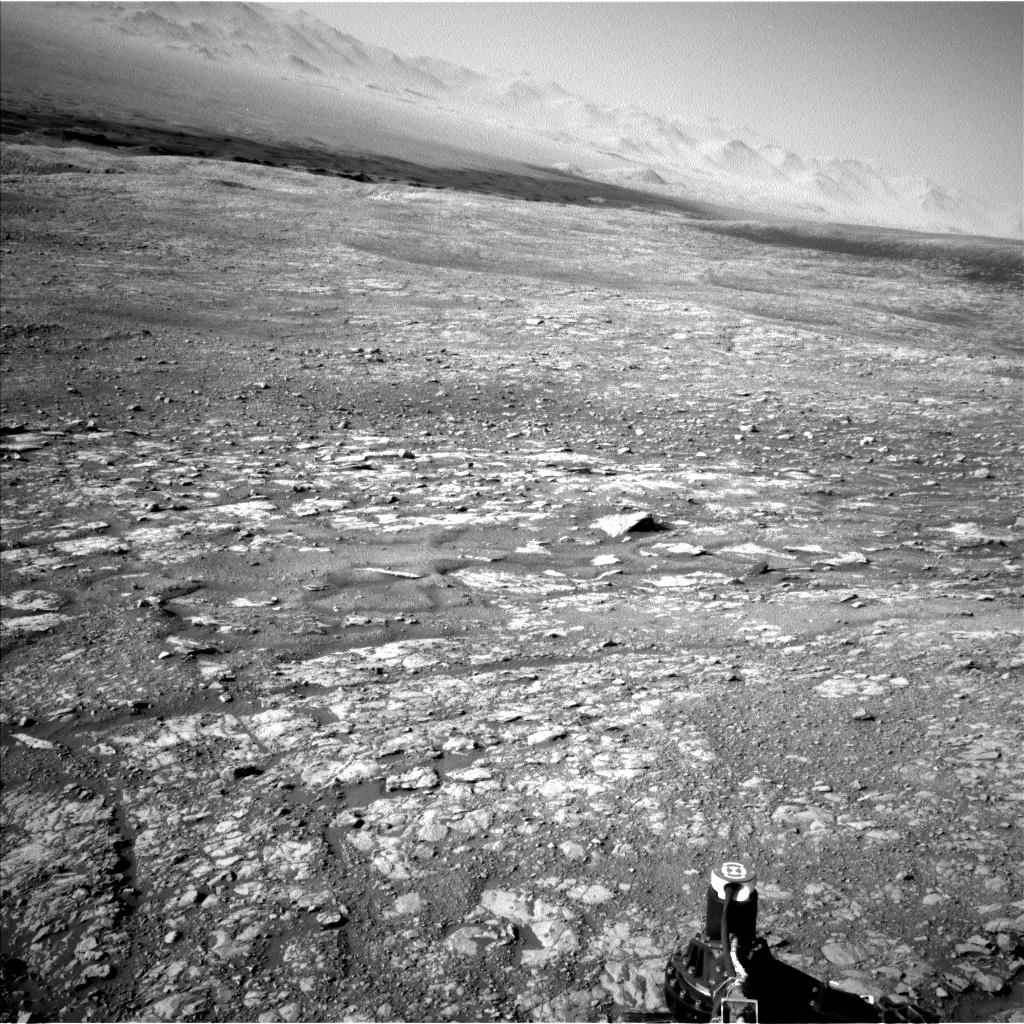
Curiosity Mastcam Left image acquired on Sol 1999, March 22, 2018.
Credit: NASA/JPL-Caltech/MSSS
A recent plan has Curiosity carrying out remote sensing activities to examine layering in the rocks, as well as contact science on the target dubbed “Sgurr of Eigg” to characterize the unit’s chemistry and fine-scale morphology. “We’ll continue these types of activities over the weekend plan,” Edwards adds, “to refine our understanding of this workspace.”
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2000, March 23, 2018.
Credit: NASA/JPL-Caltech/LANL
Road map
A new traverse map has been issued showing the route driven by Curiosity through the 1999 Martian day, or sol, of the rover’s mission on Mars (March 22, 2018).
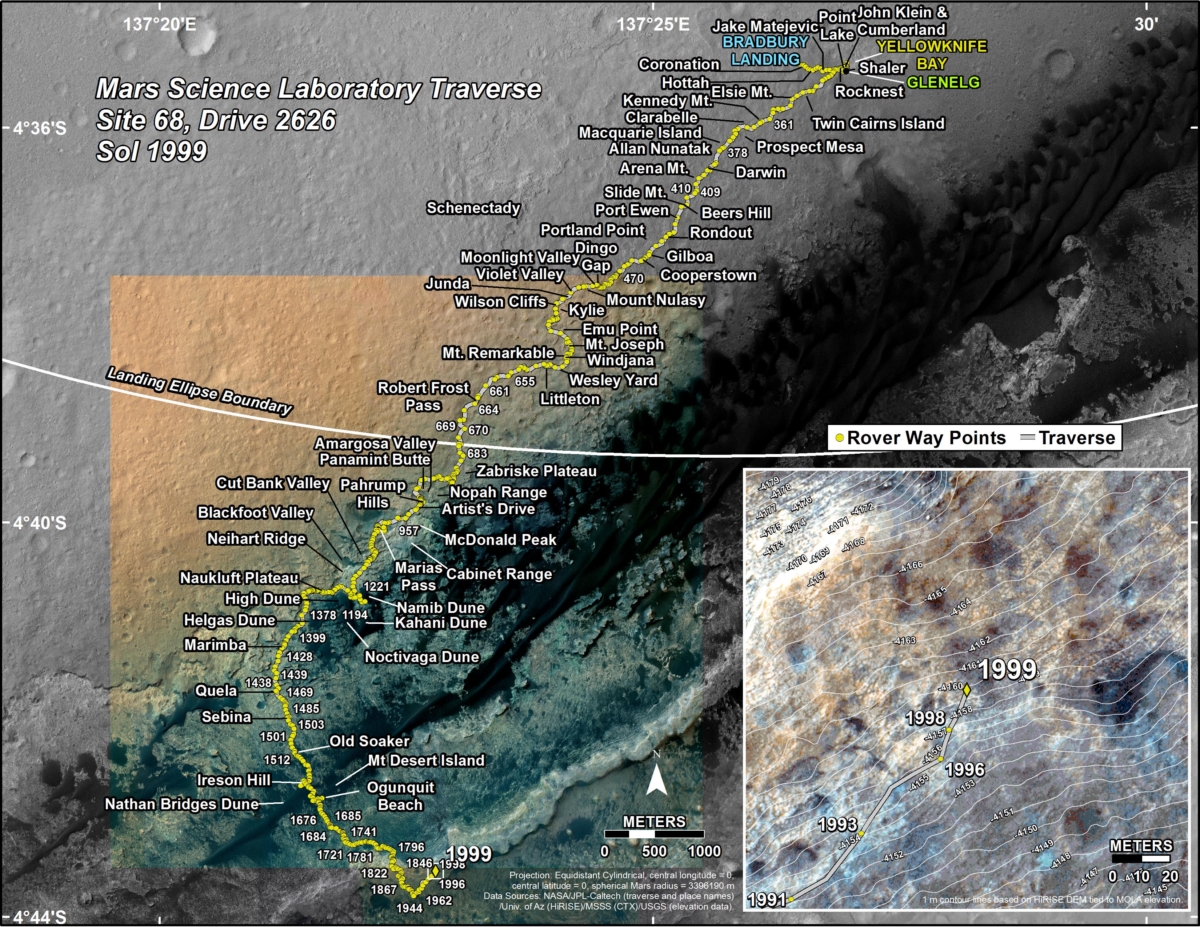
Credit: NASA/JPL-Caltech/Univ. of Arizona
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 1998 to Sol 1999, Curiosity had driven a straight line distance of about 50.39 feet (15.36 meters), bringing the rover’s total odometry for the mission to 11.48 miles (18.47 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
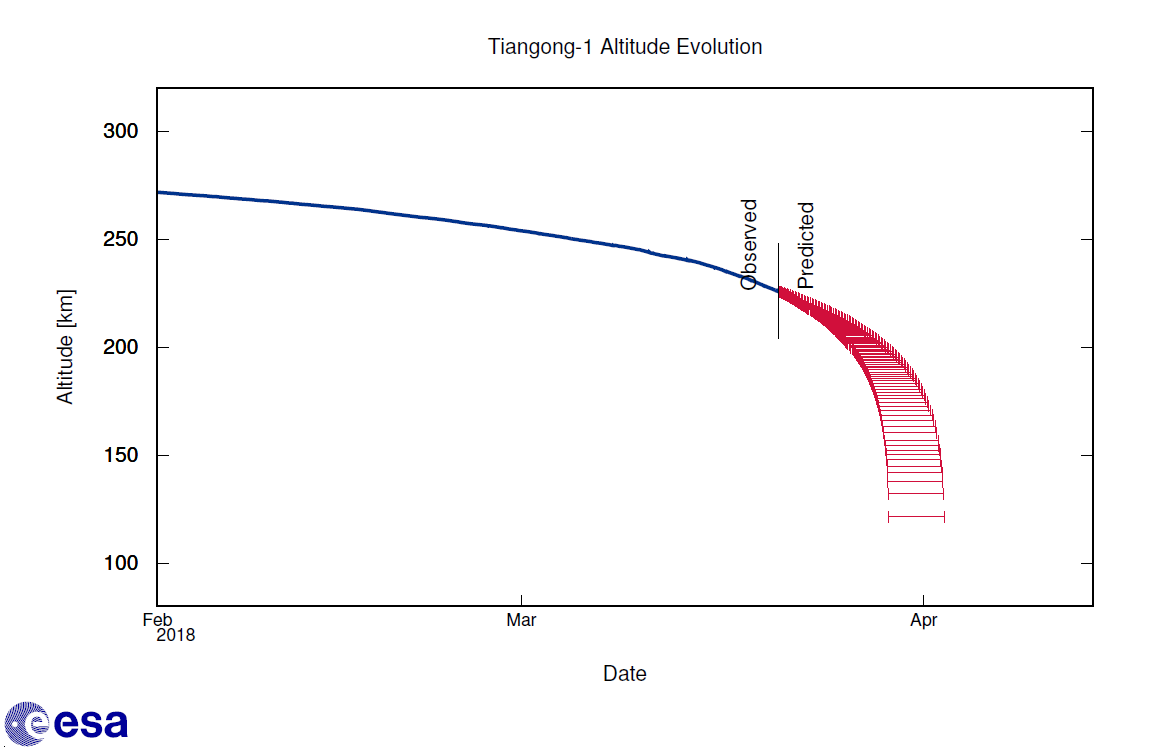
Tiangong-1 altitude decay forecast as of March 21.
Credit: ESA
The latest reentry forecast for China’s Tiangong-1 space lab has been provided by the European Space Agency’s (ESA) Space Debris Office in Darmstadt, Germany.
In a March 21 update, the Tiangong-1 reentry window forecast is now roughly March 30 to roughly April 2, with the Space Debris Office noting that this is highly variable.
Credit: The Aerospace Corporation/CORDS
Tiangong-1 was lofted in late September 2011. The first Chinese orbital docking occurred between Tiangong-1 and an unpiloted Shenzhou spacecraft on November 2, 2011. Two piloted missions were completed to visit Tiangong-1: Shenzhou 9 and Shenzhou 10.

Docking of China’s Shenzhou 10 spacecraft with the Tiangong-1 space station June 13, 2013.
Credit: CCTV
Test campaign
Meanwhile, ESA will serve as host and administrator of a test campaign regarding the reentry of China’s space lab, conducted by the Inter Agency Space Debris Coordination Committee (IADC).
IADC comprises space debris and other experts from 13 space agencies/organizations, including NASA, ESA, European national space agencies, Japan’s JAXA, India’s ISRO, Korea’s KARI, Russia’s Roscosmos and the China National Space Administration.
IADC members will use the fall of Tiangong-1 to conduct their annual reentry test campaign, during which participants will pool their predictions of the time window, as well as their respective tracking datasets obtained from radar and other sources. The aim is to cross-verify, cross-analyze and improve the prediction accuracy for all members.

Artist’s view of Tiangong space lab
Credit: CMSE
Two modules
There are two modules that compose Tiangong-1: A habitable experimental module and a resources module. It has a habitable volume of 15 cubic meters and is equipped with sleep stations for astronauts.
The space lab’s mass at launch was over 9 tons (18,740 pounds; 8,500 kilograms).Tiangong-1’s length is 34 feet (10.5 meters) and sports a diameter of 11 feet (3.4 meters) It is outfitted with two solar panels that are roughly 7 meters by 3 meters.
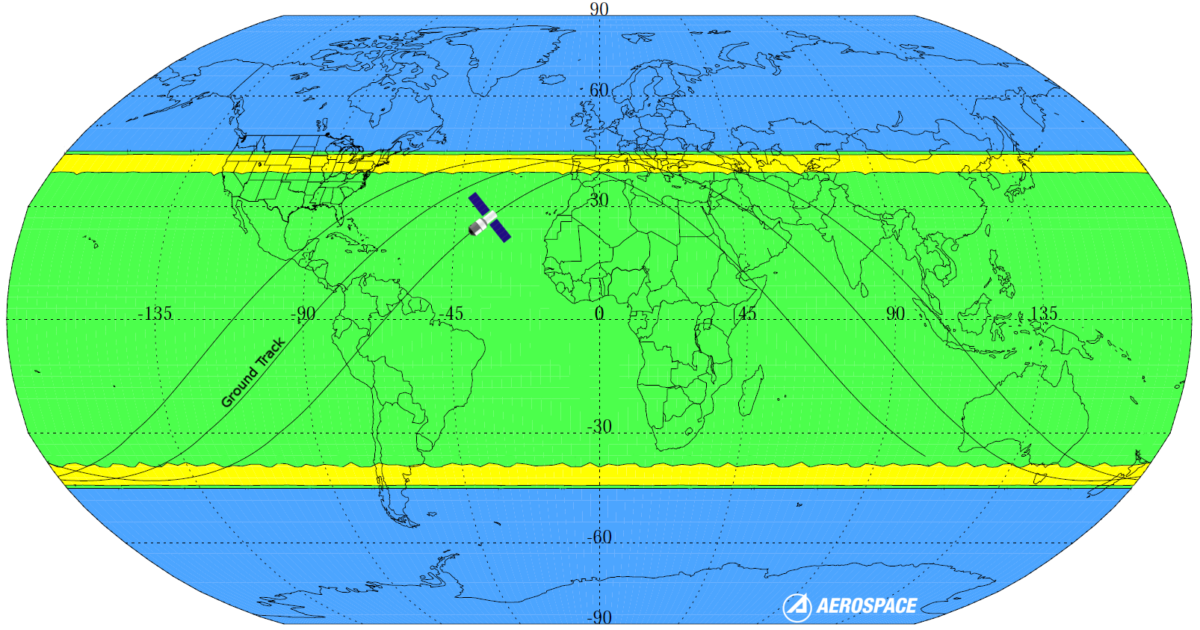
There is a chance that a small amount of Tiangong-1 debris may survive reentry and impact the Earth’s surface. Should this happen, any surviving debris would fall within a region that is a few hundred kilometers in size and centered along a point on the Earth that the station passes over. The map below shows the relative probabilities of debris landing within a given region. Yellow indicates locations that have a higher probability while green indicates areas of lower probability. Blue areas have zero probability of debris reentry since Tiangong-1 does not fly over these areas (north of 42.7° N latitude or south of 42.7° S latitude). These zero probability areas constitute about a third of the total Earth’s surface area.
Credit: The Aerospace Corporation’s CORDS
Where on Earth?
As to where on Earth Tiangong-1’s will reenter, that’s an unknown. But given the spacecraft’s inclination, this object will reenter somewhere between 43° North and 43° South latitudes.
Owing to the Chinese station’s mass and construction materials, there is a distinct possibility that some portions of Tiangong-1 will survive and reach the Earth’s surface.
Curiosity Navcam Left B image taken on Sol 1998, March 21, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is at the end of Sol 1999 activities.
“Curiosity is but one sol away from a major mission milestone, but work always comes before celebrations,” reports Scott Guzewich, an atmospheric scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland.
Curiosity Mastcam Right image acquired on Sol 1998, March 21, 2018.
Credit: NASA/JPL-Caltech/MSSS
Major decision
A recent major decision was whether to have Curiosity perform contact science at the current location and conduct a short drive, or make a longer drive toward stop #12 on the Vera Rubin Ridge campaign, Guzewich explains. The team has decided quickly to choose the latter option.
Curiosity Mastcam Left image taken on Sol 1998, March 21, 2018.
Credit: NASA/JPL-Caltech/MSSS
But prior to the drive, scientists had room for a short science block that included Chemistry and Camera (ChemCam) and Mastcam analysis of a bedrock target termed “Mangersta,” measurements of dust in the atmosphere, and a search for dust devils.

Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 1996, March 18, 2018.
Credit: NASA/JPL-Caltech/MSSS
“Then Curiosity will boogie toward stop #12, and after getting there, conduct a ChemCam AEGIS (Autonomous Exploration for Gathering Increased Science) activity,” Guzewich concludes.

Space Corps, Space-based Missile Defense, and other topics: General John E. Hyten, USAF, Commander, United States Strategic Command before Senate Committee on Armed Services, March 20, 2018.
Credit: Inside Outer Space/Screengrab
General John E. Hyten, USAF, Commander, United States Strategic Command before Senate Committee on Armed Services on March 20, 2018.
Testimony:
https://www.armed-services.senate.gov/imo/media/doc/Hyten_03-20-18.pdf
Video:
https://www.armed-services.senate.gov/hearings/watch?hearingid=747E75AD-5056-A066-609C-D40E2956EA06

Apollo 17’s Harrison “Jack” Schmitt was the last man to set foot on the lunar surface, taking part in the 6th human landing on the Moon in December 1972.
Credit: NASA
A 45th Anniversary of Apollo 17 Panel was held at the 49th Lunar and Planetary Science Conference (LPSC), being held this week in The Woodlands, Texas.
Taking place on Wednesday, March 21, the event was live streamed and captured the saga of Apollo 17.
This panel discussion featured Apollo 17 moonwalker, Harrison Schmitt (first geologist on the Moon), Gerry Griffin (Apollo 17 Flight Director), and James Head III (Apollo 17 backroom scientist).

Apollo 17 mission in December 1972 surveyed the Taurus-Littrow highlands and valley area.
Credit: NASA
The panel was moderated by Carlé Pieters of Brown University.
Apollo 17 field observations and sampling in the valley of Taurus Littrow has produced a number of major conclusions and hypotheses.

Livestream
This 45th Anniversary of Apollo 17 Panel was streamed live on the LPSC Livestream page:
https://livestream.com/viewnow/lpsc2018/videos/172096372

Candidate landing region of China’s Chang’E-4 lander within Von Kármán crater in SPA basin. Credit: Jun Huang, et al.
China’s plan to rocket to the Moon the Chang’E-4 mission this year is progressing. If successful, the mission will be the first exploration of the Moon’s far side – touching down at the South Pole-Aitken (SPA) basin.
One overall plan by China is to preliminarily emplace a research station (a set of probe platforms) on the Moon’s South Pole by way of three to four lander missions during the period of 2020-2030.
China’s growing Moon agenda is being outlined this week at the 49th Lunar and Planetary Science Conference being held in The Woodlands, Texas.

Chang’e-4 Moon lander and rover.
Two-step mission
The Chang’E-4 mission will be carried out in two steps, reports Jun Huang, of the Planetary Science Institute, China University of Geosciences (Wuhan). Jun is lead author of the paper that explains: Firstly, a relay satellite with two micro satellites will be launched by a CZ-4C rocket from Xichang, China. The relay satellite, equipped with a low-frequency radio spectrometer (developed in the Netherlands), will be sent to the Earth-Moon Lagrange Point 2 to make unique space physics measurements.
In addition, Jun reports, there will be laser reflectors used for orbital determination assistance. The two micro satellites will be equipped with Very-long-baseline interferometry (VLBI) and micro visible cameras contributed from Saudi Arabia.
Six months later after the relay satellite launch, the second part of the Chang’E-4 mission — a lander and a rover — will be sent moonward by a CZ-3B rocket from Xichang, China.
Scientific payloads
Since the lander and rover were designed as the backup of the Chang’E-3 mission, Jun and colleagues note that there are several similar scientific payloads, including Landing Camera, Topographic Camera on the lander, and Panorama Camera, Visible/Near Infrared Imaging Spectrometer, Ground Penetrating Radar on the rover.
The additional instruments are Low-Frequency Radio Spectrometer, Lunar Neutron and Radiation Dose Detector (developed in Germany), and a Lunar Micro Ecosystem on the lander. A Neutral Atom Detector (developed in Sweden) is on the rover.
The candidate landing region for the Chang’E-4 mission is 45°S-46°S 176.4°E-178.8°E, which is in the southern floor of the Von Kármán crater, within the SPA basin.

Map of Rümker region, target of Chang’E-5 sample return mission. Credit: Y. Qian, et al.
Sample return
The Chang’E-5 mission, China’s first lunar sample return mission, is now scheduled to launch in 2019 and is designed to bring back nearly 5 pounds (2 kilograms) of samples from the Moon’s surface. This mission was slated for launch in November 2017. However, it was delayed until 2019 due to a Long March 5 rocket failure.
In a paper led by Y. Qian of the Planetary Science Institute, China University of Geosciences (Wuhan), the reported landing site of the Chang’E-5 mission is designated between 41-45°N in latitude and 49-69°W in longitude within northern Oceanus Procellarum. This area is also called the Rümker region.

Planned landing area of Chang’e-5 landing sites
T.A. Giguere, et al.
The Rümker region is located in the smooth plains in northern Oceanus Procellarum. Mons Rümker is a circular volcanic complex that is roughly 43 miles (70 kilometers) in diameter and some 1,640 feet (170 meters) higher than the surrounding mare surface. The Rümker region is covered by a variety of landforms, such as numbers of mare ridges and domes.
Research station
In another paper presented at the LPSC meeting, Lin Xu, Yongliao Zou and Jiang Wu review China’s Change’E Project. The authors of this paper are from the General Office of Lunar and Deepspace Exploration.

South Pole-Aitken (SPA) basin.
Credit: NASA/Goddard
The Change’E Project is designed to implement and complete the following three stages: “circling around the Moon”, “landing on the Moon” and “returning from the Moon” before 2020.
A lunar research station is described as a set of probe platforms, with the overall scientific goals being:
(1) to detect and study the distribution, content and source of water and volatile components;
(2) to acquire the characteristics of the chemical composition of the deep part of the Moon;
(3) to study the age of the South Pole Aitken basin and the early impact history of the solar system;
(4) to explore the surface environment of the lunar south pole;
(5) to carry out lunar resource utilization tests;
(6) to carry out bio-scientific studies on the lunar surface;
(7) to carry out observation and research on macro-geological phenomena in the base of the moon; and
(8) to carry out the Earth-Moon Very-long-baseline interferometry (VLBI) test and observation.
Technical support
Also on China’s Moon agenda, the team reports, a rare-gas extraction test in the lunar soil, a 3D-printing test in order to provide “technical support” for future manned Moon activities and lunar resource utilization.
In addition, a series of small terrestrial ecosystem experiments on the lunar surface will provide theoretical and technological support for safeguarding future crewed missions.
Lastly, equipment is to be emplaced on the Moon to evaluate the energy difference of the Earth’s climate system. Doing so would reveal the dynamics of our planet’s magnetosphere, the plasma layer, and the ionosphere, they report.
Microsymposium

Courtesy: Jim Head/Brown University
The Chinese lunar and deep space exploration program was spotlighted prior to the LPSC.
Microsymposium 59 was cosponsored by the Watson Institute for International and Public Affairs, and the Russian Academy of Sciences Vernadsky and Space Research institutes, a March 17-18 program dedicated to a focus on the lunar and deep space exploration activities of the People’s Republic of China.
“International exploration of the Solar System has grown significantly since the beginning of the Space Age, with missions launched by many nations, and participation by scientists worldwide in planning and data analysis,” explains James Head, a key microsymposium organizer at Brown University in Providence, Rhode Island.
Head said that of particular interest was the analysis of data for the Chang’E 1-3 missions and the concepts and landing site selection studies for the Chang’E-4 farside rover and Chang’E-5 nearside mare lunar sample return missions.
Microsymposium 59 heard reports from a wide range of Chinese university and Chinese Academy of Sciences scientific colleagues, along with their descriptions of both data analysis and results of previous missions to the Moon. It also included informal and unofficial presentations on future mission plans and activities for the Moon, Mars, asteroids and beyond.
By the numbers, Microsymposium 59 had over 200 individuals and walk-in attendees registered from 15 nations.

Credit: Jack Schmitt
Now available as the third installment of Apollo 17 astronaut and geologist, Jack Schmitt’s Apollo 17: Diary of the 12th Man.
The new addition is Chapter 9, “The 12th Man”, with other chapters to follow.

Challenger at Taurus-Littrow.
Credit: NASA
This chapter chronicles the moments after touchdown in December 1972 of the Challenger Lunar Module in the Valley of Taurus-Littrow; safing the spacecraft systems and preparing it for an extended stay; the first views of the surface from the windows; donning the space suits; and Schmitt’s recounting of becoming the 12th man to step out onto the lunar surface.
Neil Armstrong became the first man to step on the Moon on July 20, 1969, followed by Buzz Aldrin, Pete Conrad, Alan Bean, Al Shepherd, Ed Mitchell, Dave Scott, Jim Irwin, John Young, Charlie Duke, and, number 11, Gene Cernan.
To view Schmitt’s new chapter, Go to:
https://www.americasuncommonsense.com
Note: As with the previous installments, the chapter will be accessible from three areas of the website: On the main home page as a “Post” until replaced by the next installment; in the right sidebar under the listing “Recent Posts”; and in the right upper sidebar under the “Pages” heading “1. Apollo17: Diary of the 12th Man” as each chapter is uploaded. The new addition is Chapter 9, “The 12th Man.”
Special thanks to Ronald A. Wells, PI, Tranquillity Enterprises. (Latin cognate!)

Deflecting the massive asteroid 101955 Bennu was the focus of recent research by a national planetary defense team. Bennu will make a very close approach to Earth on Sept. 25, 2135.
Credit: LLNL
Planetary defense specialists have taken a hard look at deflecting Earth-bound asteroids and scoping out the prospects to nudge a massive asteroid.
The effort is part of a national planetary defense collaboration between NASA, the Lawrence Livermore National Laboratory (LLNL) and the National Nuclear Security Administration (NNSA), which includes LLNL and Los Alamos National Laboratory.
Nailed by HAMMER?
At the heart of the assessment is use of a 9-meter-tall, 8.8-ton spacecraft — dubbed HAMMER (Hypervelocity Asteroid Mitigation Mission for Emergency Response vehicle) — to serve as either a kinetic impactor, essentially a battering ram, or as a transport vehicle for a nuclear device.
A possible mission for HAMMER: deflect 101955 Bennu, a massive asteroid with a diameter more than five football fields), tipping the scales at roughly 79 billion kilograms (1,664 times as heavy as the Titanic), circling the sun at around 63,000 miles per hour.
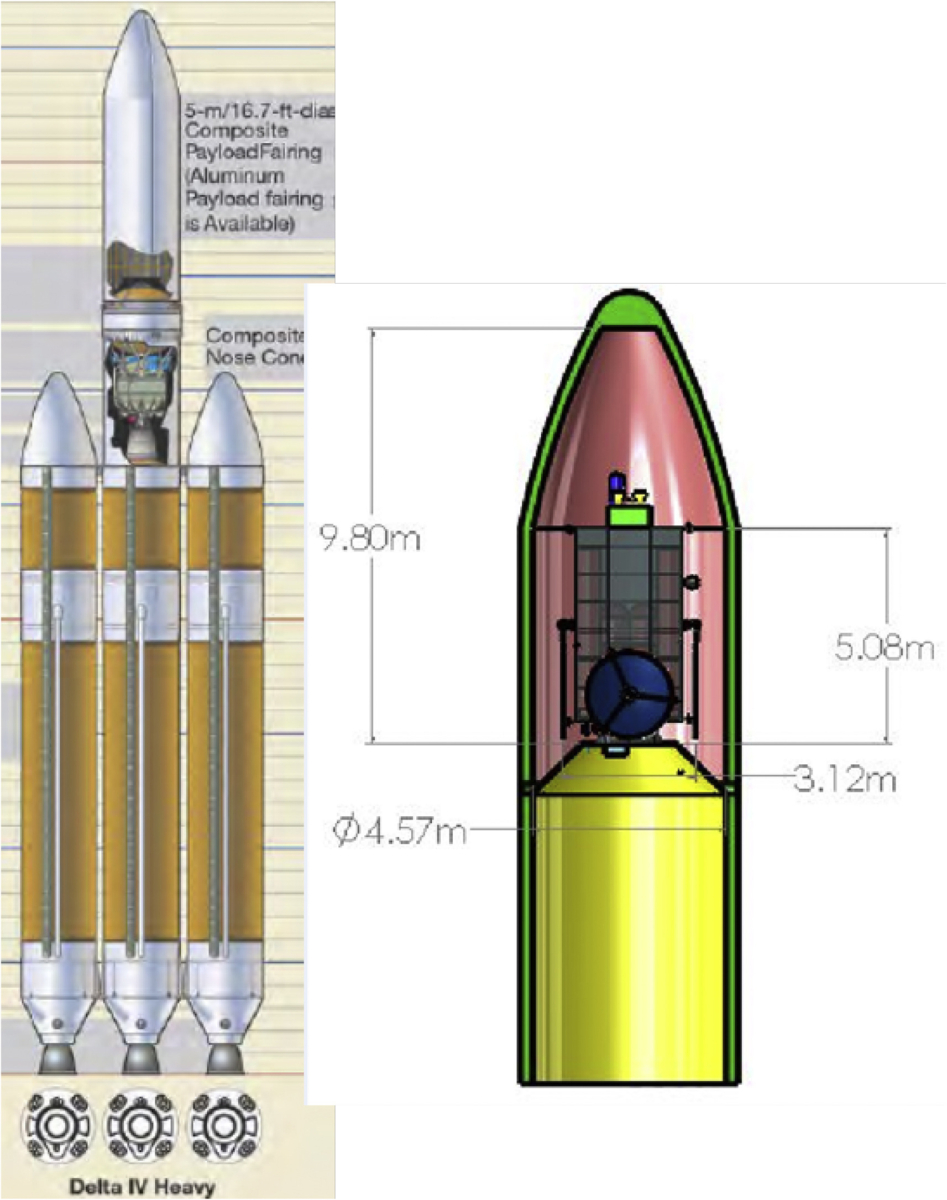
The 8.8-ton conceptual HAMMER spacecraft (right) is designed to fit within the Delta IV Heavy, the world’s second highest-capacity launch vehicle in operation, surpassed only by SpaceX’s Falcon Heavy rocket.
Credit: LLNL
Impact stats
More to the point. Based on observation data available, Bennu has a 1 in 2,700-chance of striking Earth on September 25, 2135, and it is estimated that the kinetic energy of this impact would be equivalent to 1,200 megatons (80,000 times the energy of the Hiroshima bomb).
“The chance of an impact appears slim now, but the consequences would be dire,” said Kirsten Howley, LLNL physicist and coauthor on a paper — Options and uncertainties in planetary defense: Mission planning and vehicle design for flexible response – published recently in the journal, Acta Astronautica.
“This study aims to help us shorten the response timeline when we do see a clear and present danger so we can have more options to deflect it. The ultimate goal is to be ready to protect life on Earth,” Howley explains in a LLNL press statement.
Gentle nudge
The preferred approach to mitigating an asteroid threat would be to deflect it by ramming a kinetic impactor into it, delivering a gentle nudge large enough and soon enough to slow it down and change its collision course with Earth, but not so large that the object breaks apart.
The new study helped quantify the threshold where a kinetic impactor would no longer be an effective deflection option. To evaluate this threshold, researchers focused on determining how many HAMMER impactors it would take to deflect Bennu.
Study results
The paper concluded that using a single HAMMER spacecraft as a battering ram would prove inadequate for deflecting an object like Bennu.
While recent simulations of nuclear deflection scenarios are not included in this paper – they will be included in a companion paper to be submitted for publication in the near future – the findings suggest that the nuclear option may be required with larger objects like Bennu.
The nuclear approach carries the potential to deposit much more energy into an object like Bennu, causing a greater change in speed and trajectory.
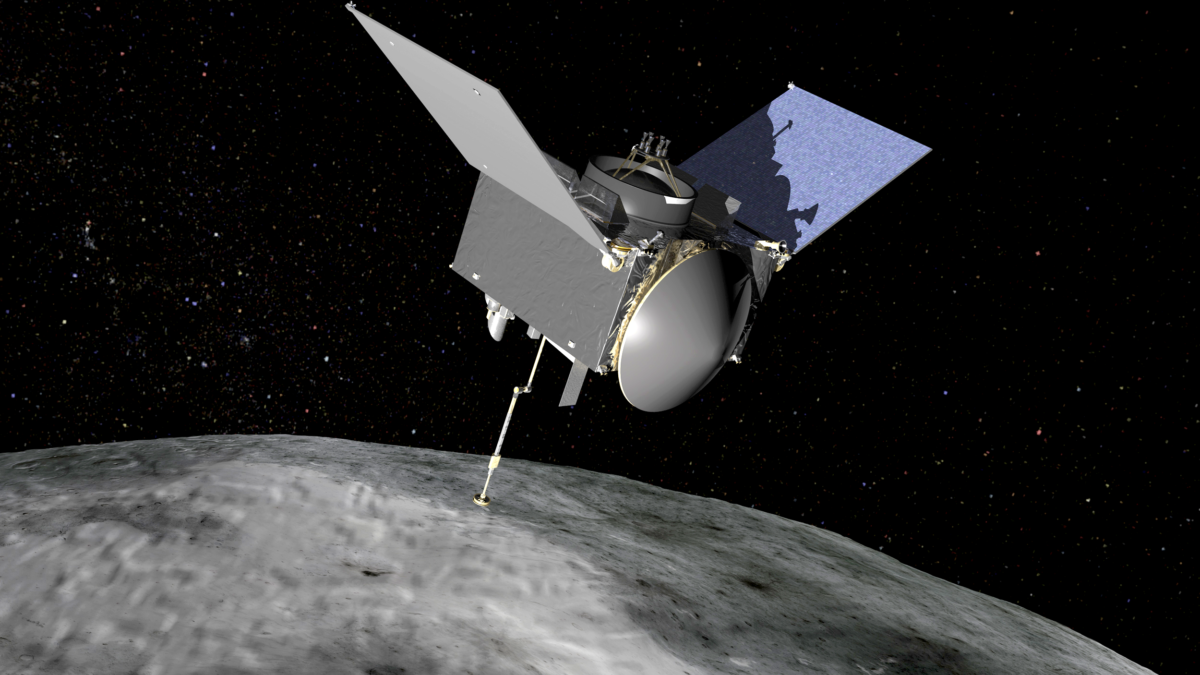
OSIRIS-REx spacecraft at Bennu.
Credit: NASA/University of Arizona
Bound for Bennu
If asteroid Bennu rings a bell, it’s the target of NASA’s Origins, Spectral Interpretation, Resource Identification, and Security – Regolith Explorer, mercifully shortened to OSIRIS-Rex. It is the space agency’s first asteroid sample return mission.
Bennu is a rare B-type asteroid (primitive and carbon-rich), which is expected to have organic compounds and water-bearing minerals like clays.
OSIRIS-REx launched Sept. 8, 2016, from Cape Canaveral, Florida and will arrive at Bennu on December 3 of this year. In March 2021, the window for departure from the asteroid will open, and OSIRIS-REx will begin its return journey to Earth, arriving two and a half years later on Sept. 24, 2023. The sample return capsule will separate from the spacecraft and enter the Earth’s atmosphere. The capsule containing the sample will be collected at the Utah Test and Training Range.
For more information on HAMMER and the new appraisal of planetary defense techniques — Options and uncertainties in planetary defense: Mission planning and vehicle design for flexible response – go to:
https://www.sciencedirect.com/science/article/pii/S0094576517307919#fig1

