Author Archive
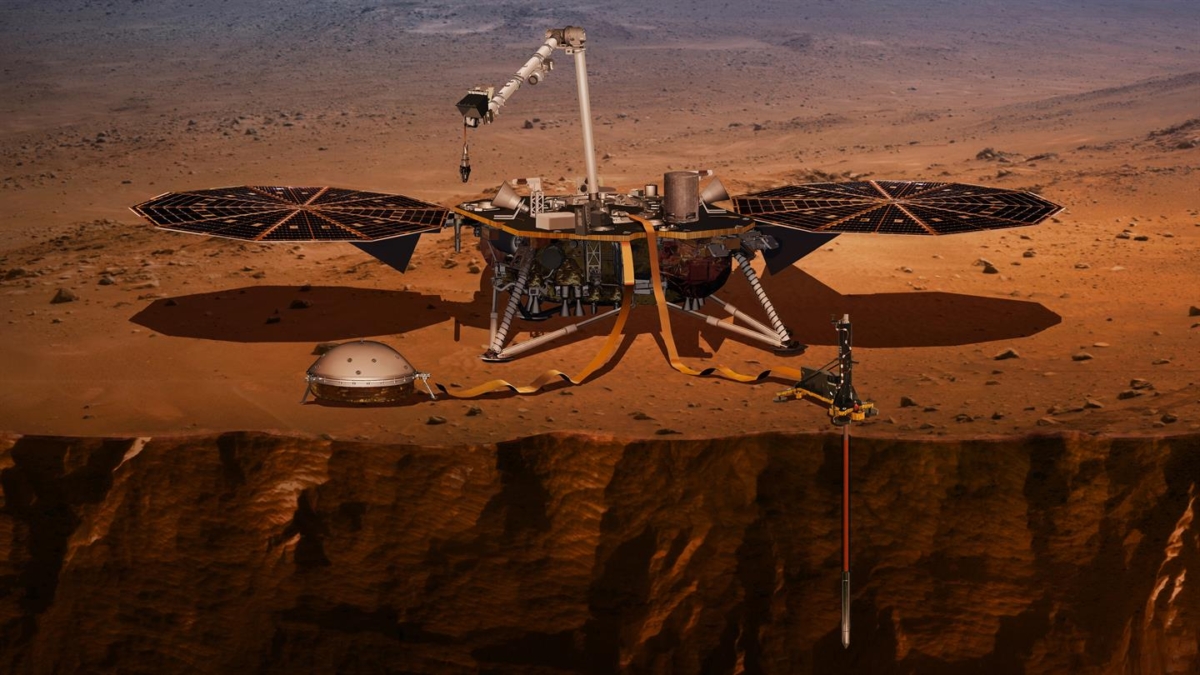
Liftoff approaches for NASA’s next Mars mission: the Interior Exploration using Seismic Investigations, Geodesy and Heat Transport (InSight) lander is ready for a May 5 sendoff from Vandenberg Air Force Base in California at 13:05 CEST (04:05 local time).
Upon its arrival on November 26, 2018, InSight will touch down just north of the equator, on the Elysium Planitia plain, where it will commence its work as a geophysical observatory. This will be the first mission to Mars that focuses on exploring the planet’s interior and its 4.5-billion-year history.

Credit: NASA/JPL
Marsquakes
With the InSight spacecraft firmly planted on Mars, a robotic arm will deploy the French-supplied Seismic Experiment for Interior Structure (SEIS) onto the surface first. The seismometer will be used to record waves propagating through the planet from marsquakes and from sites impacted by meteors.
The German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) is contributing one of the three principal experiments of the NASA InSight mission, HP3 – a small probe that will hammer five meters deep into the Martian soil to measure temperature and thermal conductivity at various depths to determine the heat flow from deep inside the planet. The resource-saving key technology developed by DLR has already been used in road construction in China, for agriculture in Poland and in avalanche surveillance in Switzerland.
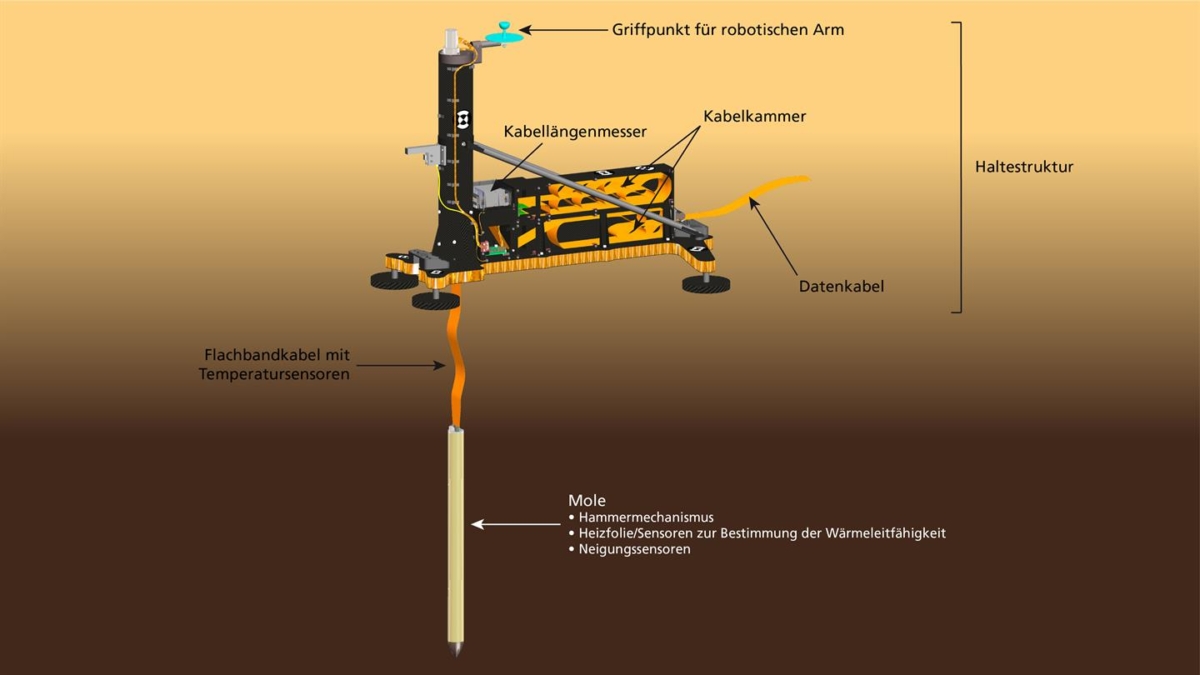
DLR’s HP3 experiment.
Credit: NASA/JPL/DLR
Essential components
HP3 stands for “Heat Flow and Physical Properties Package.”
The experiment is designed for an operational life of two Earth years. Essential components of HP3 are the “Mole” and the ribbon cable with the temperature sensors, which the Mole will pull behind it into the ground to perform measurements.
If all goes well, in early January 2019 the HP3 experiment developed by DLR will be taken from the platform and lowered onto the Martian ground.

Credit: NASA/JPL/USGS (MOLA)
As noted by the DLR, HP3 is not a “drill” as it does not rotate. Instead, the mole advances using a special hammering mechanism in which a spring is repeatedly compressed, causing a hammer to be accelerated forward towards the inner lining of the tip of the “Mole” each time the spring is released. These impacts generate an acceleration of up to 14,000 times that of Earth’s gravity, which is why the sensitive measurement technology inside the probe requires special shock absorption techniques to withstand the stresses.
Go to this informative video:
Curiosity Navcam Left B image acquired on Sol 2041, May 4, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is performing Sol 2041 duties.
Reports Michelle Minitti, a planetary geologist at Framework in Silver Spring, Maryland: “Curiosity continued her journey off of the ‘Vera Rubin Ridge,’ driving west along the ridge flank toward a passable route down to the bedrock north of the ridge.”
Sulfate vein
The current plan has the robot’s Chemistry and Camera (ChemCam) acquiring ten spot rasters across “Homer Lake,” a finely-layered bedrock block, and “Barto Lake,” white sulfate vein material pasted to the side of the Homer Lake block.
Curiosity Navcam Right B photo taken on Sol 2041, May 4, 2018.
Credit: NASA/JPL-Caltech
After ChemCam shoots Homer Lake and Barto Lake, Minitti says the rover’s Mastcam will collect multispectral data from both targets, giving Mastcam a view of the areas cleared of dust by laser shots and providing complementary data to the ChemCam analyses.
Drive ahead
“Mastcam will feel at home imaging “Terrace Point,” a set of bedrock blocks with distinctive surface textures. Navcam will search for dust devils both before and after the drive,” Minitti adds.

Curiosity Mastcam Right image acquired on Sol 2040, May 3, 2018.
Credit: NASA/JPL-Caltech/MSSS
In the cue is a drive of over 80 feet (25 meters), Minitti says, “aimed at a nice expanse of bedrock for the upcoming weekend plan.”
Credit: NASA/JPL-Caltech/Univ. of Arizona
NASA’s Curiosity Mars rover is deep into Sol 2040 operations.
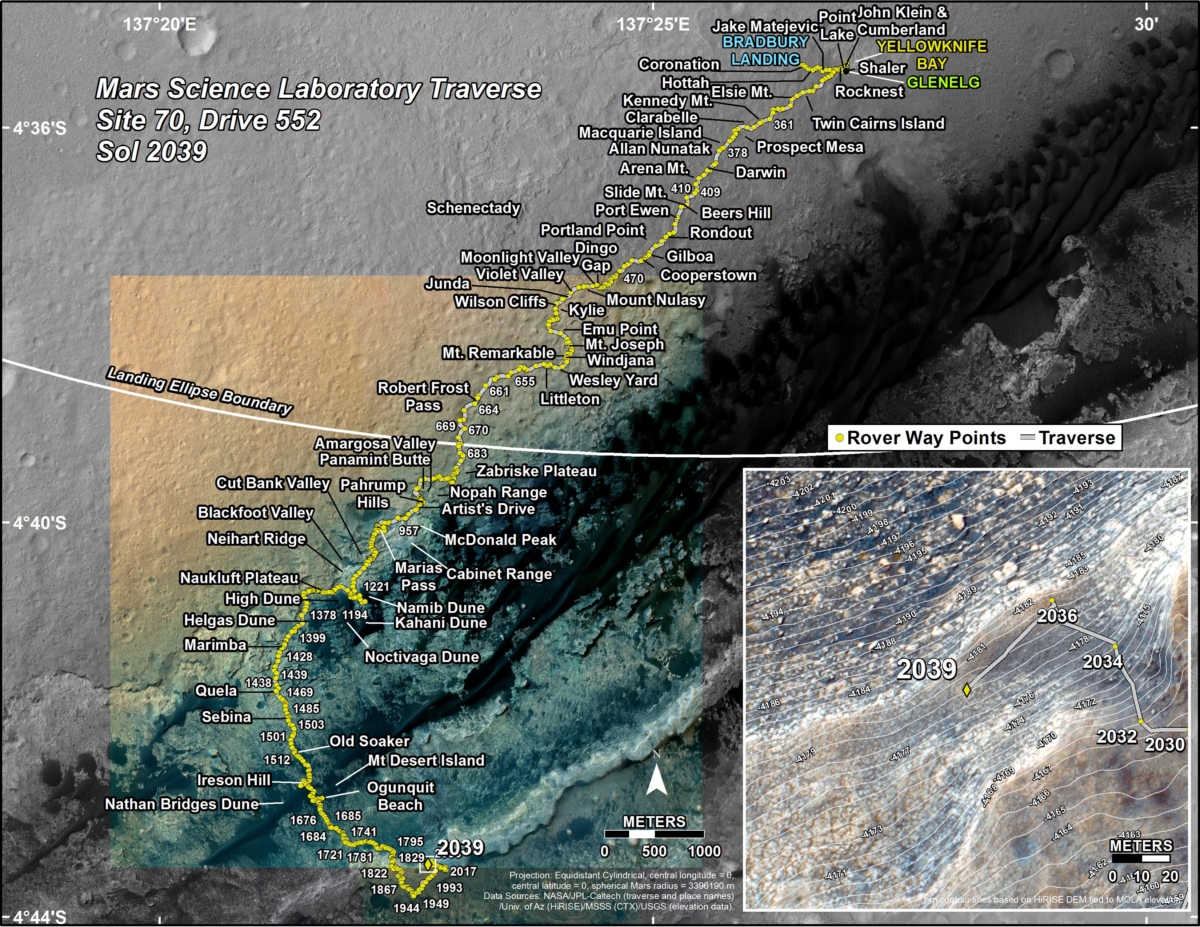
A new Curiosity traverse map through Sol 2039 has been issued.
The map shows the route driven by the robot through the 2039 Martian day, or sol, of the rover’s mission on Mars (May 02, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).

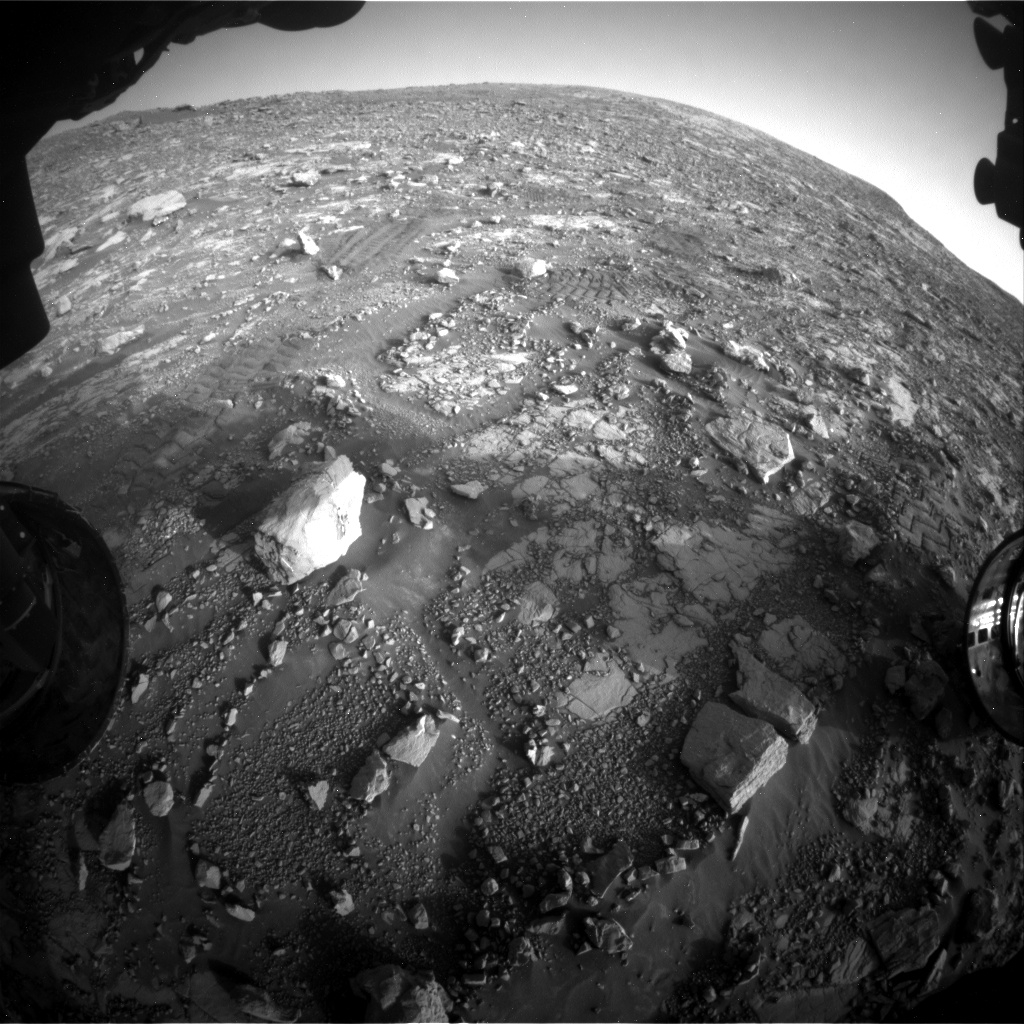
Curiosity Front Hazcam Left B photo taken on Sol 2040, May 3, 2018.
Credit: NASA/JPL-Caltech
From Sol 2036 to Sol 2039, Curiosity had driven a straight line distance of about 141.04 feet (42.99 meters), bringing the rover’s total odometry for the mission to 11.76 miles (18.93 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Curiosity Navcam Left B image acquired on Sol 2040, May 3, 2018.
Credit: NASA/JPL-Caltech

Curiosity Navcam Right B image taken on Sol 2040, May 3, 2018.
Credit: NASA/JPL-Caltech

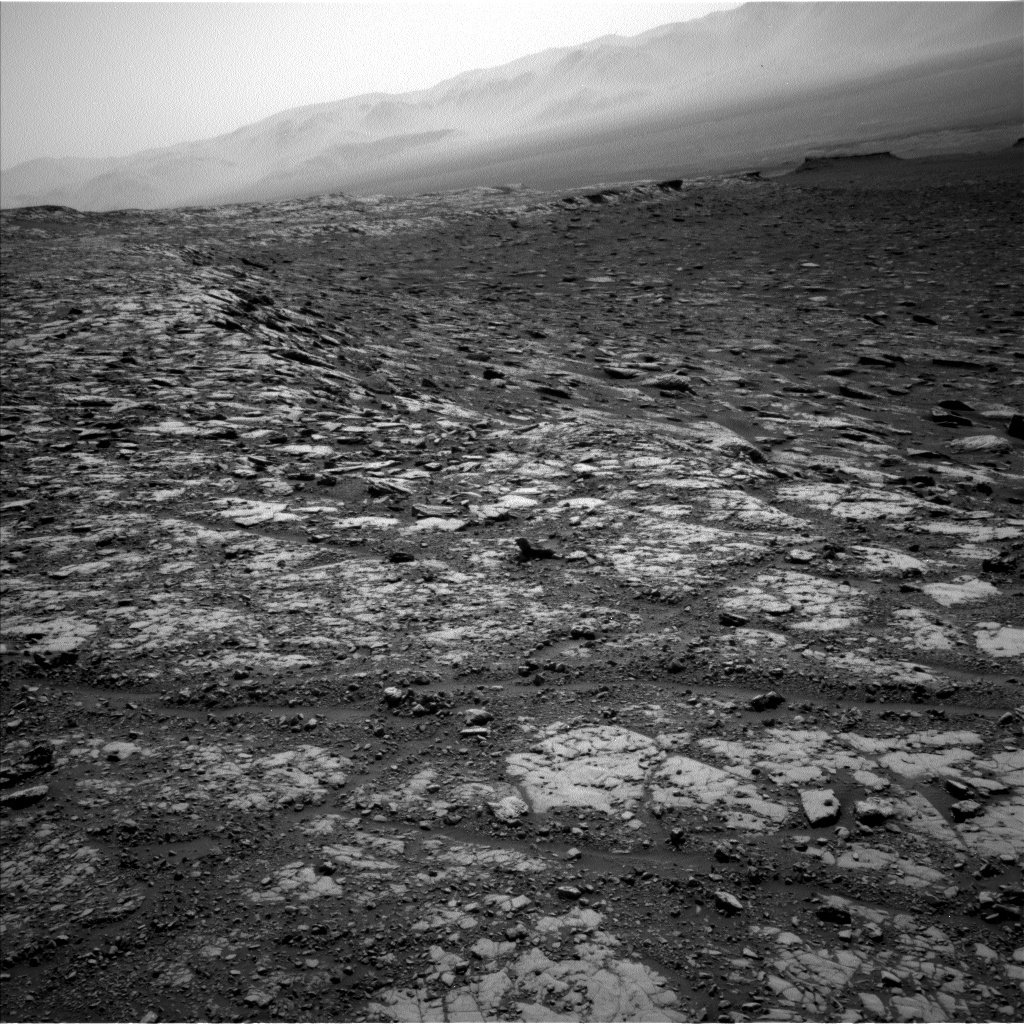
Curiosity Navcam Right B image taken on Sol 2039, May 2, 2018.
Credit: NASA/JPL-Caltech

NASA’s Kilopower project: The power level would be suitable to access, extract, and process lunar ice in permanently shadowed craters and demonstrate propellant production.
Credit: NASA
Important strides are being made in building and testing a key energy source that literally “empowers” human crews on the Moon. NASA’s Space Technology Mission Directorate (STMD) has provided multi-year funding for the Kilopower project. This work is viewed as a stepping stone to small fission-powered planetary science missions – including how to energize a lunar outpost.
Building on prior work by a joint NASA and Department of Energy team, the main goal is to assemble and test an experimental prototype of a space fission power system.
In a May 2 NASA briefing, Kilopower officials announced that the experiment was successfully carried out from November 2017 through March 2018 at the Nevada National Security Site. The effort is led by NASA’s Glenn Research Center in Ohio to demonstrate space fission power systems technology.
Small and simple
The pioneering reactor is a small and simple approach for long-duration, sun-independent electric power for space or extraterrestrial surfaces. Offering high design margins for life and reliability, it will produce from one to 10 kilowatts of electrical energy, continuously for 10 years or more, explains Lee Mason, STMD’s Principal Technologist for Power and Energy Storage at NASA Headquarters. The power system uses a solid, cast uranium-235 reactor core, about the size of a paper towel roll. Reactor heat is transferred via passive sodium heat pipes with that heat then converted to electricity with high efficiency Stirling engines. They churn out about four times as much electric power from the plutonium fuel as compared to a space-rated radioisotope thermoelectric generator (RTG).

For Apollo expeditions to the Moon, RTGs powered five Apollo Lunar Surface Experiment Packages (ALSEPs) set up by moonwalking crews.
Credit: NASA
Apollo power
A historical flashback: For Apollo expeditions to the Moon, RTGs powered five Apollo Lunar Surface Experiment Packages (ALSEPs) set up by moonwalking crews. Those packages contained scientific instruments that relayed information back to Earth, such as data on solar wind and radiation, and the observation that the Moon is geologically active. The five ALSEP stations were shut down in 1977.
“What we are striving to do,” Mason says, “is give space missions an option beyond RTGs which provide a couple hundred watts or so. A Moon mission for Kilopower would be ideal. It has the potential to power lander payloads through the lunar night, and possibly for months or years. The power level would be suitable to access, extract, and process lunar ice in permanently shadowed craters and demonstrate propellant production. NASA could also co-develop the system with commercial lunar lander companies that supply power to mining ventures or small settlements,” he told Inside Outer Space.

Credit: LANL/NASA
Confidence-builder
A successful lunar campaign using Kilopower technology could be a confidence-builder for later Mars missions where humans would depend on the fission power system to make their return propellant and power their habitats.
Having a space-rated fission power unit for future lunar explorers is a game changer, Mason adds. “This new technology is in the kilowatt-class and can mature to provide hundreds of kilowatts of power, or even megawatts. That’s why we call it the Kilopower project. But first things first, and our test program is the way to do it.”
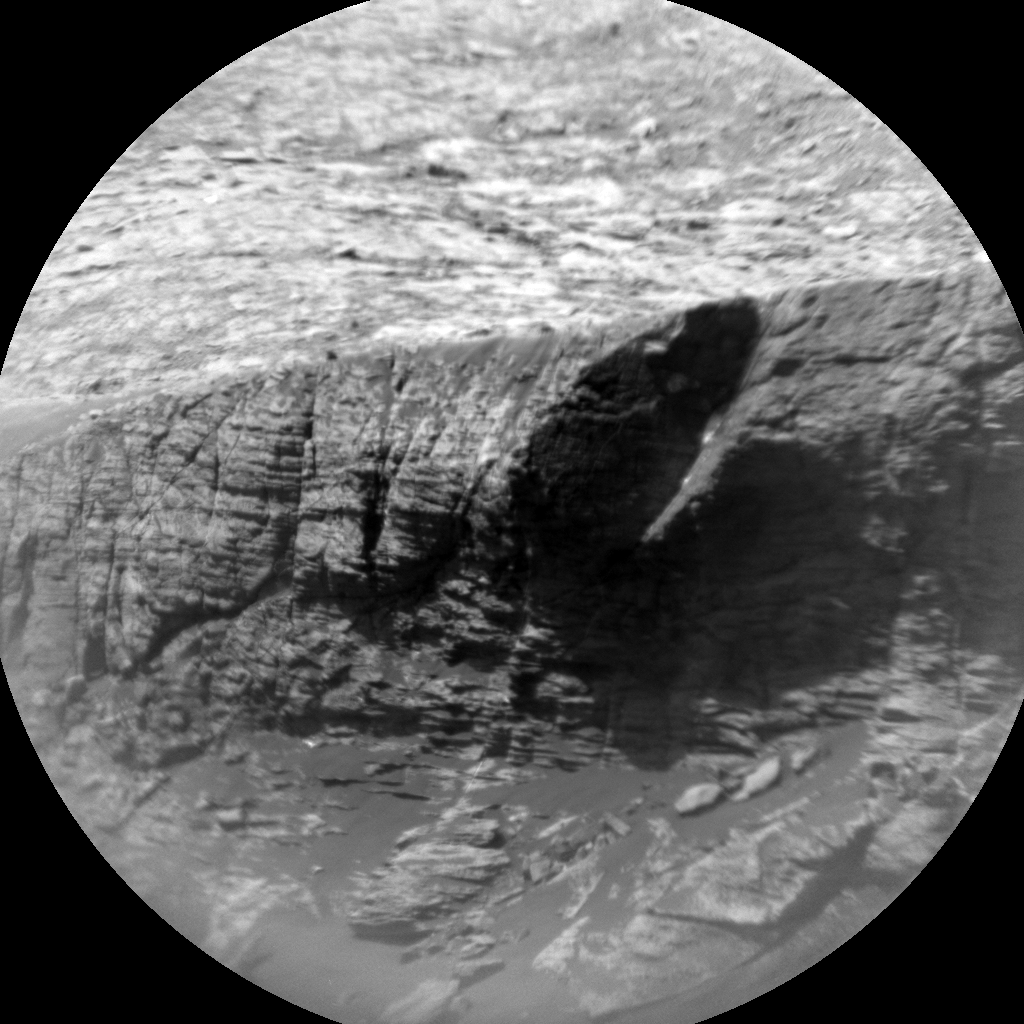
Curiosity ChemCam Remote Micro-Imager photo of Red Cliff taken on Sol 2038, May 1, 2018
Credit: NASA/JPL-Caltech/LANL
NASA’s Mars Curiosity rover is now in Sol 2039, following some impressive preliminary imaging of “Red Cliff,” reports Rachel Kronyak, a planetary geologist at the University of Tennessee in Knoxville.

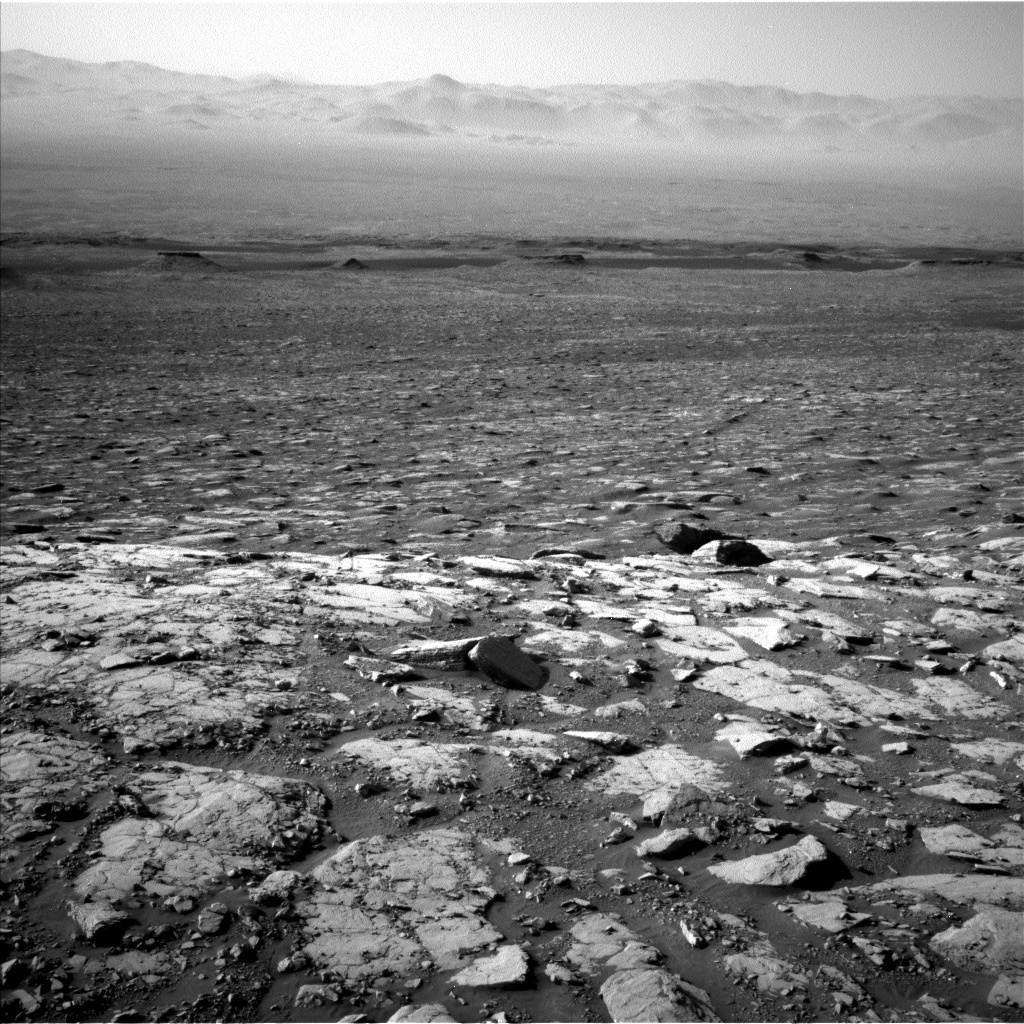
Curiosity Navcam Left B image acquired on Sol 2039, May 2, 2018.
Credit: NASA/JPL-Caltech
The plan now scripted calls for the robot to take additional imagery of Red Cliff “before continuing to drive toward a location where we think we are likely to drill. Kronyak adds.
Small scale studies
“We have a short science block to start the day, during which we’ll use Mastcam to take some context imaging of our surroundings and upcoming terrain,” Kronyak explains. On the plan is using the rover’s Chemistry and Camera (ChemCam) Remote Micro-Imager (RMI) to extend the coverage of Red Cliff.
“These RMI images give us a really great opportunity to study small-scale stratigraphic details in rocks that are pretty far away from the rover,” Kronyak points out.
Curiosity Navcam Left B image acquired on Sol 2039, May 2, 2018.
Credit: NASA/JPL-Caltech
Post-drive duties
Following the science block, Curiosity is to drive and take a standard sequence of post-drive images.
Also on tap is taking a dust devil movie with Navcam as well as a post-drive Autonomous Exploration for Gathering Increased Science (AEGIS) observation to collect some preliminary geochemical information at the rover’s next location.
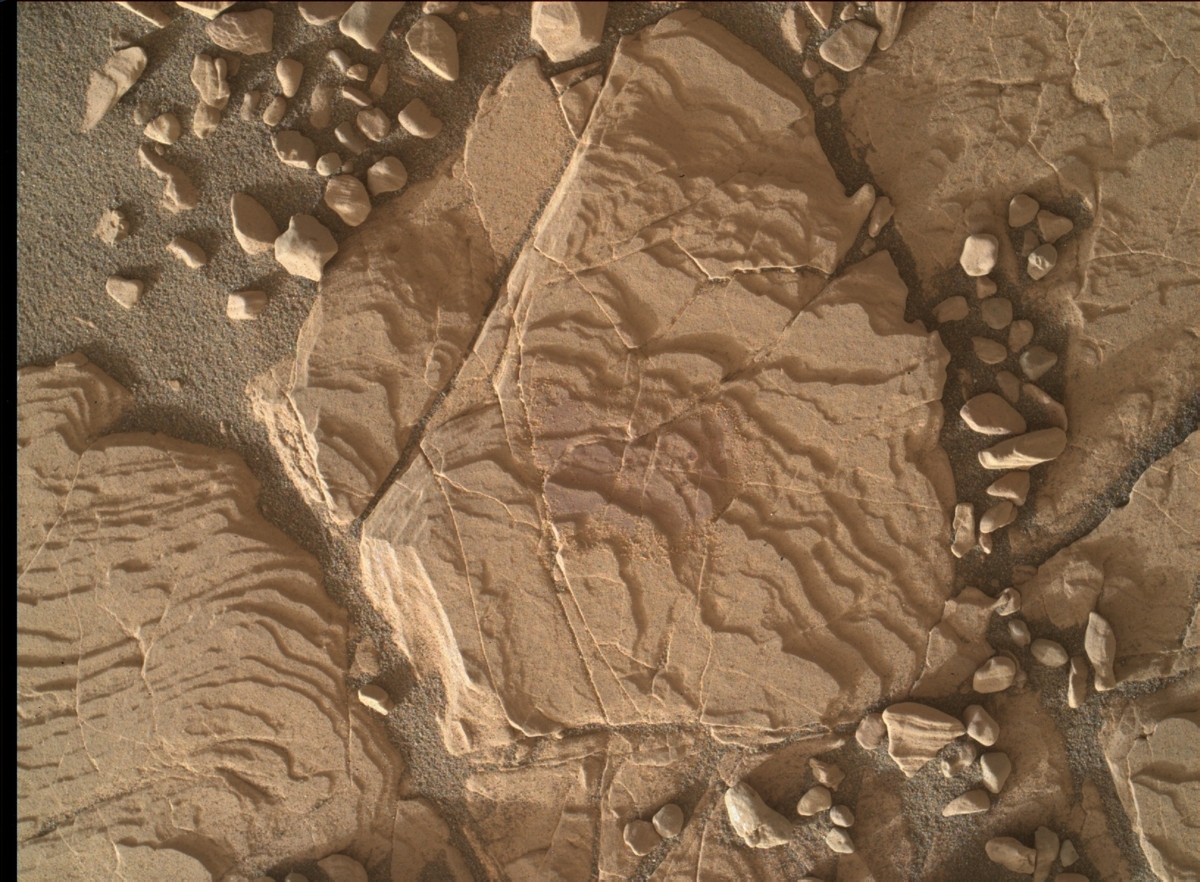
Curiosity Mars Hand Lens Imager (MAHLI) taken on Sol 2038, May 1, 2018.
Credit: NASA/JPL-Caltech/MSSS
Curiosity will then take standard Rover Environmental Monitoring Station (REMS) and Dynamic Albedo of Neutrons (DAN) data, Kronyak concludes, “to round out another great day on Mars!”

Credit: GAO

Credit: GAO
This report includes assessments of NASA’s 26 major projects, each with a life-cycle cost of over $250 million. Project assessments include Europa Clipper, the James Webb Space Telescope, the Mars 2020 rover and the Space Launch System.
For a short fact sheet go to:
https://www.gao.gov/assets/700/691588.pdf
For the full GAO report, go to:
https://www.gao.gov/assets/700/691589.pdf
Also, give a listen to this watchdog podcast on the GAO report:
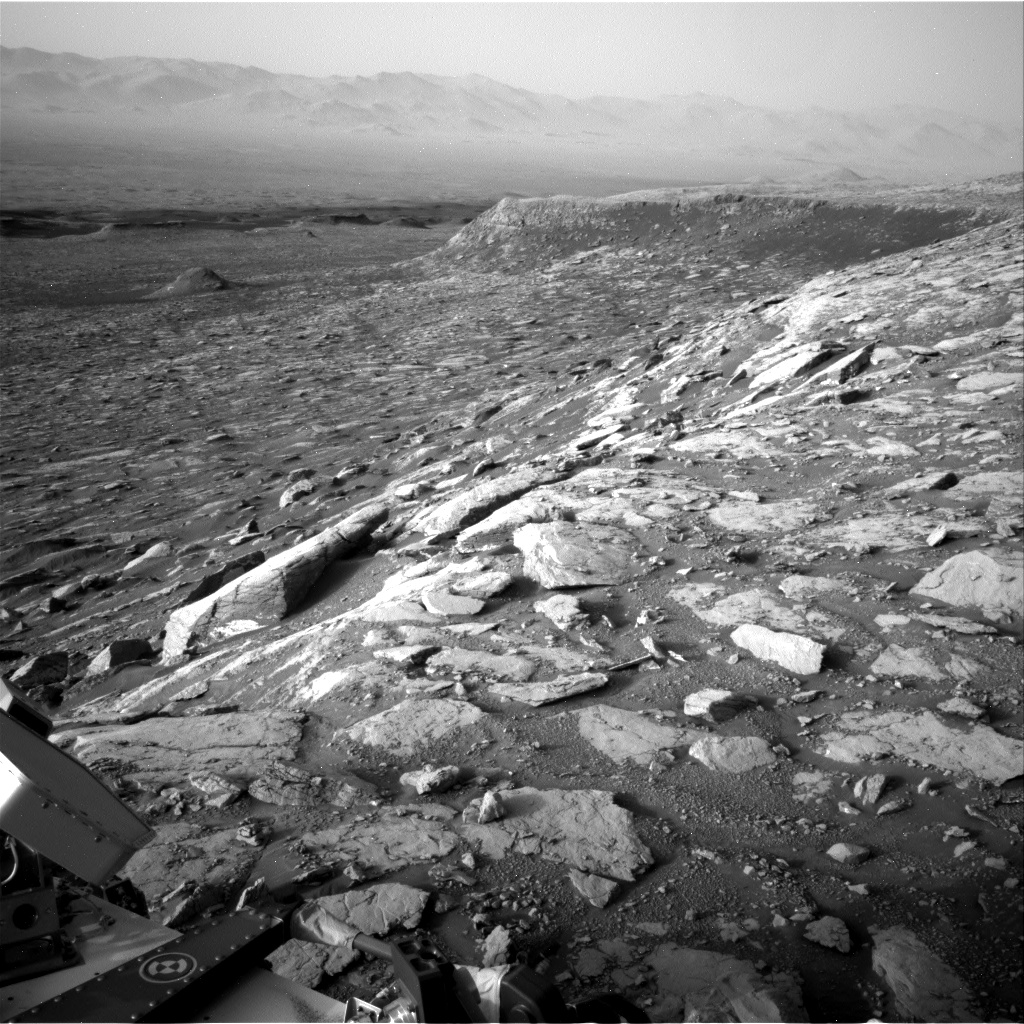
Image of outcrop called “Red Cliff,” a vertical cliff face seen in the mid-field of this Navcam image.
Curiosity Navcam Right B photo taken on Sol 2036, April 29, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2038 duties.
“A successful drive in the weekend plan set Curiosity up nicely for a full sol of contact and remote science,” reports Rachel Kronyak, a planetary geologist at the University of Tennessee in Knoxville. “The main priority during planning today was to image the outcrop we’ve called ‘Red Cliff,’ a beautiful vertical cliff face.”
The plan now calls for use of both the Chemistry and Camera (ChemCam) Remote Micro-Imager (RMI) and the rovers Mastcam to image Red Cliff, “which will give us a really nice, well-rounded dataset in order to fully characterize the features and sedimentary structures present in the outcrop,” Kronyak adds.
Bedrock targets
Aside from imaging, Curiosity is to assess some local bedrock targets.
With ChemCam’s Laser-Induced Breakdown Spectrometer (LIBS) on tap is analyzing targets “Paulsen Lake,” “Negaunee,” and “Nashwauk.”
With the robot’s Mars Hand Lens Imager (MAHLI) and Alpha Particle X-Ray Spectrometer (APXS) additional analyses on Nashwauk is to be performed.
Curiosity Front Hazcam Left B image acquired on Sol 2036, April 29, 2018.
Credit: NASA/JPL-Caltech
Environmental measurements
Lastly, Curiosity is slated to do some standard environmental science activities, including the use of the Rover Environmental Monitoring Station (REMS), the Dynamic Albedo of Neutrons (DAN), and a tau measurement.
“During a tau observation, we use Mastcam to measure the optical depth of the atmosphere,” Kronyak notes. “This is particularly useful for understanding the scattering properties of the molecules and particles that are present in the martian atmosphere.”
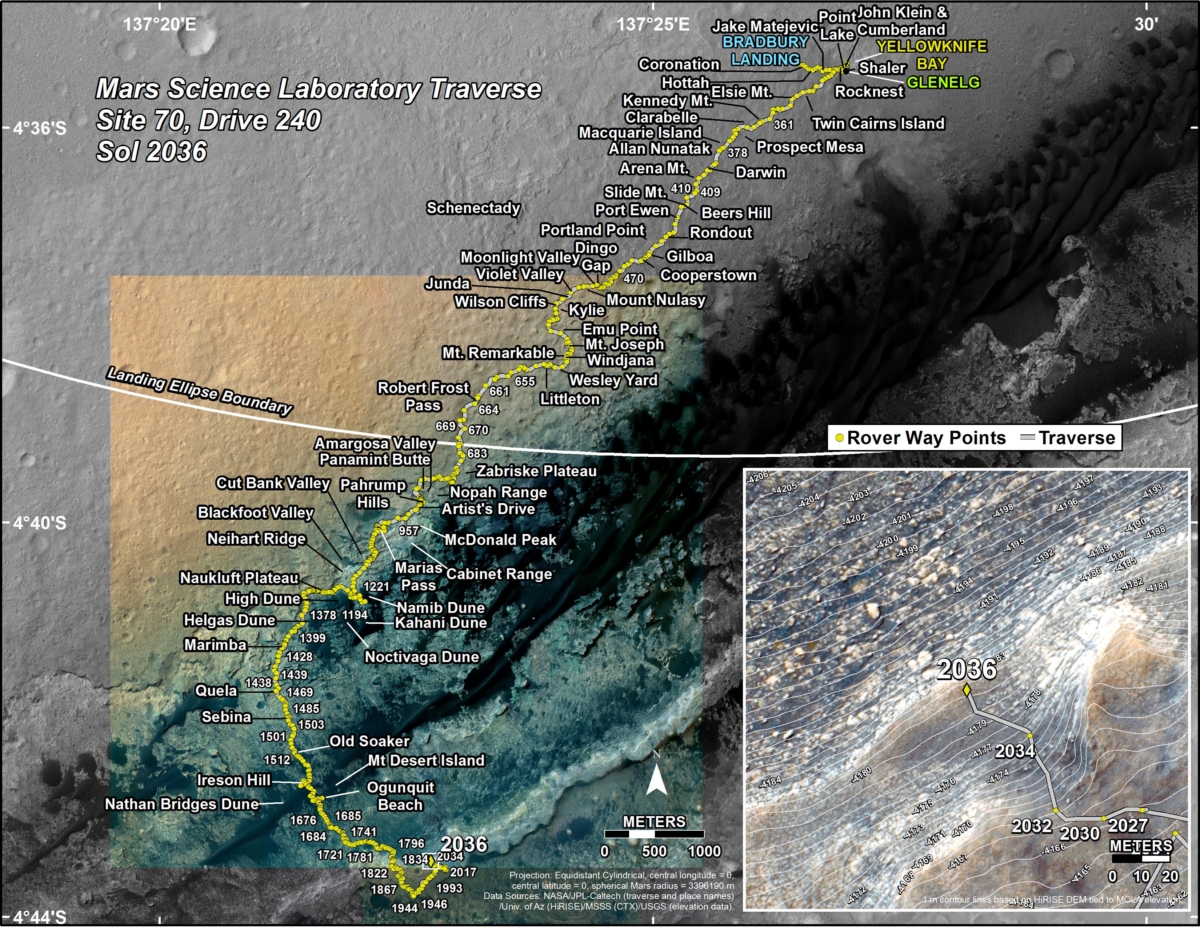
Credit: NASA/JPL-Caltech/Univ. of Arizona
Road map
A newly issued Curiosity traverse map through Sol 2036 shows the route driven by the rover through the 2036 Martian day, or sol, of the rover’s mission on Mars (April 30, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2034 to Sol 2036, Curiosity had driven a straight line distance of about 89.38 feet (27.24 meters), bringing the rover’s total odometry for the mission to 11.73 miles (18.88 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
Credit: CNSA/China News Service Screengrab
In a recent China Central Television (CCTV) interview with Wang Liheng, a senior consultant of the China Aerospace Science and Technology Corporation (CASC) and academician of the Chinese Academy of Engineering, he discussed building a scientific research base on the moon.
“Experts propose that after the three steps for the lunar probe program and the three steps for a manned space program, the two ‘three steps’ can be combined to build a scientific research and development base on the Moon,” Wang said.

Apollo 15 image captures landing locale of China’s Chang’e-5 Moon lander – the Mons Rümker region in the northern part of Oceanus Procellarum.
Credit: NASA
People will go to the Moon first to undergo the trials posed by the lunar environment and adapt to it, and then go deeper into space. “The next goal is to send people to the Mars,” Wang said.
Larger carrier rocket
Wang also said in order to carry larger spacecraft into space, China is conducting studies on a heavy-lift rocket which is about 100 meters long and has a diameter of nearly 10 meters with a payload capacity reaching 100 tons.
“The current Long March-5 carrier rocket has a payload capacity of 23 to 25 tons. But in the future, in order to go to the Moon and Mars or even further, a carrier with a larger payload is needed to launch our spacecraft,” Wang said.

Credit: CNSA/China News Service Screengrab
Bao Weimin of CASC and an academician of the Chinese Academy of Sciences, also advised CCTV: “The study on the heavy-lift rocket has now reached the stage where further researches on key technologies are being conducted.”
“With heavy-lift rockets, we can realize a larger lunar probe program – a manned lunar landing. It will be completed in 2030 or later,” Bao said.
C-SPAN/Screengrab
President trump held a rally in Michigan on April 28…during which he made note of the U.S. space program and private space initiatives.
“We inherit the legacy of the great Americans who constructed the railroads, tamed the frontiers, built the highways, carved out the panama canal, and put a man on the face of the Moon. And by the way, excuse me, do you see how our space program is going? A little different.
And we are letting those rich guys that like rockets — go ahead, use our property, pay us some rent. You can use Cape Canaveral. Just pay us rent and spend that money. Pretty amazing, right?
How about when the engines come down, they come down and they land so they can use them again. That looks like a futuristic, beautiful stuff.
We have reinvigorated our space program to a level that nobody thought possible in this short period of time.
NASA is back. NASA is back. And Mars is waiting for us, you know that. Great. You know what it is? It is great. It is science. It is important. Very important militarily, folks.”
Go to roughly: 1:10:34
https://www.c-span.org/video/?444641-1/president-trump-remarks-michigan-rally
Curiosity Front Hazcam Right B image acquired on Sol 2035, April 28, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover has just started Sol 2036 operations.
“Down the ridge she comes,” reports Michelle Minitti, a planetary geologist at Framework in Silver Spring, Maryland.
Curiosity continues to pick her way downhill off the “Vera Rubin Ridge” and onto the Murray formation rocks below.

Curiosity Mastcam Left photo taken on Sol 2034, April 27, 2018.
Credit: NASA/JPL-Caltech/MSSS
“This weekend’s plan only covers two sols,” Minitti notes, “to give Earth planning time and Mars time a chance to realign so that the science team is not up in the middle of the night commanding the rover.”
Nevertheless, the two sols are still full of activities.
Sandy slope
The rover is positioned on a rock-strewn sandy slope, and the science team thought the scattered rocks of the workspace would be better interrogated with Mastcam and Chemistry and Camera (ChemCam) than the robot’s Mars Hand Lens Imager (MAHLI) and the Alpha Particle X-Ray Spectrometer (APXS).
Roll over rock! Curiosity Mastcam Left photo taken on Sol 2034, April 27, 2018.
Credit: NASA/JPL-Caltech/MSSS
ChemCam targeted “Virginia,” a tan bedrock slab with small nodules, “Shannon Lake,” a red bedrock slab, and “Eveleth,” a block with distinctive layers. One of the advantages of driving backward is that rocks the rover has driven over end up in view of the remote sensing instruments,” Minitti comments.
Mastcam acquired multispectral data from a rock broken by the rover wheels, the target “Britt,” and an expanse of crossbedded outcrop, “Aurora,” to the left of the rover.
Well-preserved scarp
Minitti adds that Curiosity’s Mastcam completed imaging of the “Taconite” crater structure, which the rover has been skirting around the last several sols, with a large mosaic, and captured a single image of a well-preserved scarp in the sand amongst the rocks dubbed “Kinney.”

Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 2035, April 28, 2018.
Credit: NASA/JPL-Caltech/LANL
Dust accumulation
While MAHLI did not see any action over rock targets in the last Sol, the rover is set to image the Rover Environmental Monitoring Station (REMS) ultraviolet sensor, positioned on the rover deck.
“Such MAHLI images keep track of dust accumulation, supporting the observations of the sky made by the sensor,” Minitti points out. “The sky itself will get attention from Mastcam and Navcam, with observations of dust in the atmosphere and dust devils at midday, and observations of dust in the atmosphere and clouds in the early morning,”
High interest targets

Navcam Left B photo taken on Sol 2035, April 28, 2018.
Credit: NASA/JPL-Caltech
After a drive of roughly 165 feet (50 meters), “Curiosity ought to be positioned within sight of two prominent vertical outcrop faces farther east along the Vera Rubin Ridge,” Minitti reports. These are high interest targets for imaging for next week, as the team hopes they provide further insight into the structure and formation of the ridge itself.”
After the drive, the robot’s Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) will conduct an empty cell analysis, “a move in preparation for what the team hopes is acquisition and delivery of a new drilled sample in the not-too-distant future,” Minitti concludes.
Credit: NASA/JPL-Caltech/Univ. of Arizona
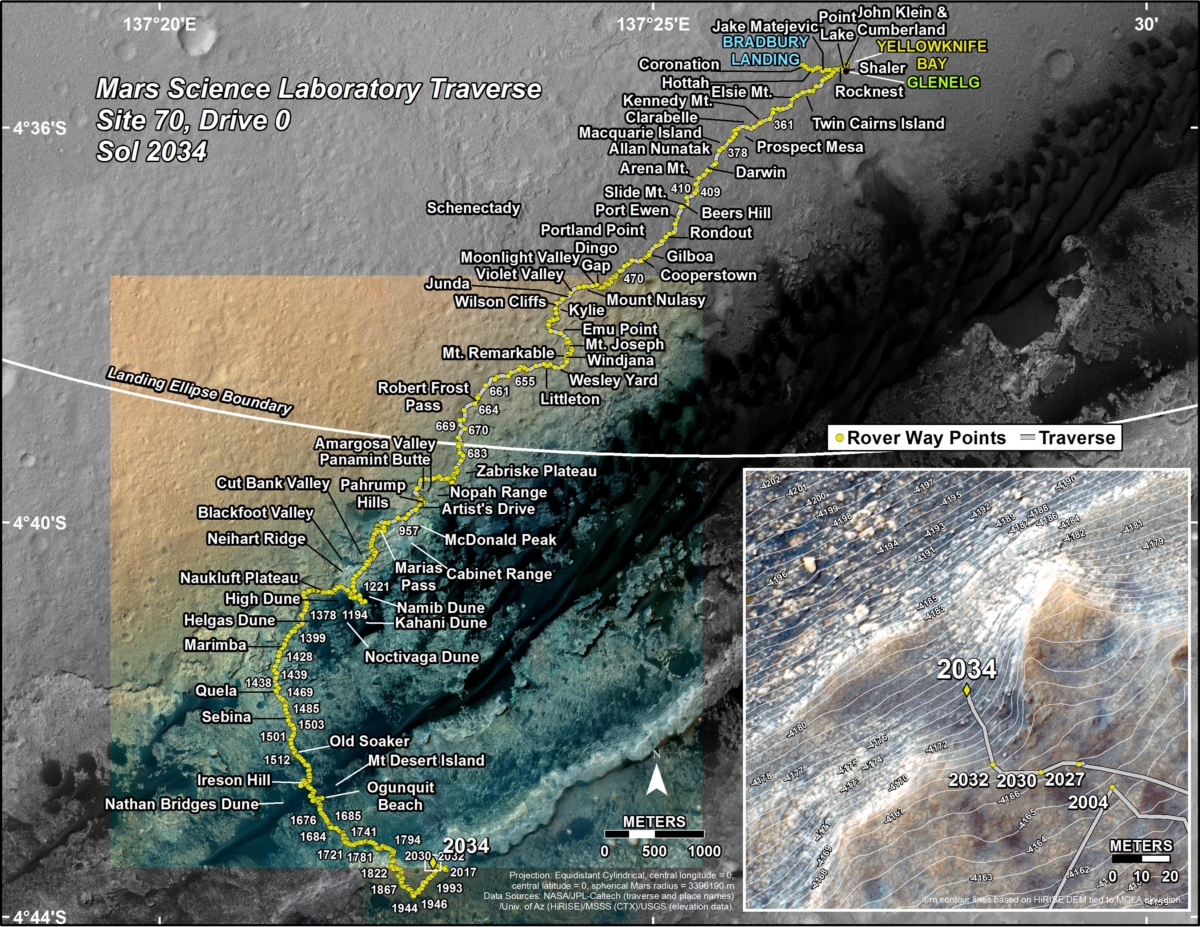
Traverse map
A new Curiosity traverse map through Sol 2034 shows the route driven by NASA’s Mars rover Curiosity through the 2034 Martian day, or sol, of the rover’s mission on Mars (April 27, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2032 to Sol 2034, Curiosity had driven a straight line distance of about 90.83 feet (27.69 meters), bringing the rover’s total odometry for the mission to 11.71 miles (18.85 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

