Author Archive

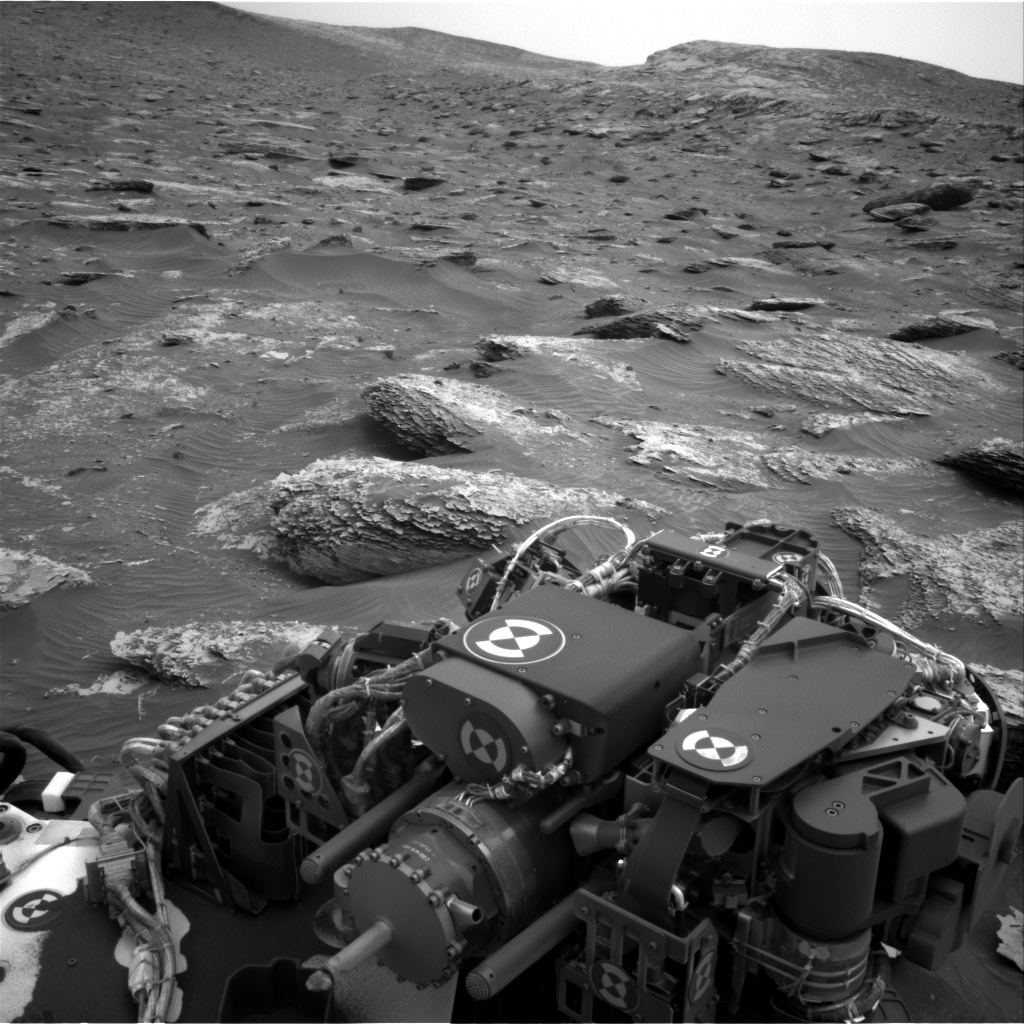
Curiosity Front Hazcam Left B image acquired on Sol 2093, June 26, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2094 duties.
Reports Lauren Edgar, a planetary geologist for the USGS in Flagstaff, Arizona: a recent two-sol plan kicked off with the good news that the rover’s power state exceeded predictions, so Mars researchers were able to add in some extra science activities.
Dust storm
The first sol called for several remote sensing activities to continue monitoring the ongoing dust storm.

Curiosity Mastcam Left photo taken on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech/MSSS
Then the team planned several Chemistry and Camera (ChemCam) observations of “Mudhole Lake,” “Jacobs Lake,” and “Monker Lake” to assess the bedrock chemistry and search for evaporites, Edgar explains, followed by Mastcam documentation.
In the afternoon, Curiosity was slated to acquire a short multispectral tau observation to measure the optical depth of the atmosphere and constrain aerosol scattering properties.

Curiosity Mastcam Left photo taken on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech/MSSS
Driving south
Given the extra power, but without many appealing contact science targets, the team decided to get an Alpha Particle X-Ray Spectrometer (APXS) calibration target observation overnight.
On the second sol Curiosity was to continue driving up the steep slope to the south, followed by post-drive imaging and further atmospheric observations, Edgar concludes.

Curiosity Mastcam Left photo acquired on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Front Hazcam Right B image taken on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2093 duties.
Notes Ryan Anderson, a planetary geologist for the USGS in Flagstaff, Arizona: “Despite the global dust storm — more correctly known as a ‘planet encircling dust event’ — darkening the skies, our nuclear-powered rover continues to do good science.”

Curiosity Navcam Right B photo acquired on Sol 2091, June 24, 2018.
Credit: NASA/JPL-Caltech
Veins and layers
A Sol 2090 plan called for the first of several Navcam observations of the dusty atmosphere over last weekend, followed by Chemistry and Camera (ChemCam) observations of the targets “Caribou Lake,” “Simar,” and “Arlberg”. ChemCam also will image the target “Young Lake” again.

Curiosity Navcam Left B image taken on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech
The rover’s Mastcam will take individual pictures of the ChemCam targets on Arlberg and Caribou Lake, plus small stereo mosaics of Simar and “Hawk Ridge” to help measure the orientation of the veins and layers seen there, Anderson reports.
MAHLI dust check
Mastcam will then make some observations of the Sun and the distant crater rim to measure the dust in the atmosphere and the robot’s Mars Descent Imager (MARDI) was set to take an image of the ground underneath the rover.
Later in the afternoon on Sol 2090, Anderson adds, Mastcam was slated to take images of the rover’s Mars Hand Lens Imager (MAHLI) to make sure it isn’t getting too dusty. APXS will then make two measurements: one on “Hunter Lake” and another on Caribou Lake.

Curiosity Navcam Left B image acquired on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech
Rover drive
On Sol 2091, the plan was to start first thing in the morning with Mastcam and Navcam atmospheric measurements of dust and searches for clouds. Later in the morning, Curiosity was to repeat some of the dust observations and Mastcam was on tap to take pictures of “Clappers,” Hunter Lake, and Caribou Lake.
On Sol 2092, the plan called for use of the Sample Analysis at Mars (SAM) Instrument Suite to make a measurement of the atmospheric composition, and then Navcam was to measure the dust in the atmosphere before a rover drive.
Anderson explains that the drive should go about 92 feet (28 meters), heading back up the slope toward the top of Vera Rubin Ridge.

Checking on Mars Hand Lens Imager (MAHLI) and dust. Curiosity Mastcam Right photo acquired on Sol 2090, June 23, 2018.
Credit: NASA/JPL-Caltech/MSSS
After the drive, Mastcam is scheduled to take another round of atmospheric dust measurements plus normal post-drive imaging, including a documentation image of the ground near the rover.
MARDI was also to take a documentation image, Anderson concludes.

Curiosity Navcam Left B image acquired on Sol 2092, June 25, 2018.
Credit: NASA/JPL-Caltech

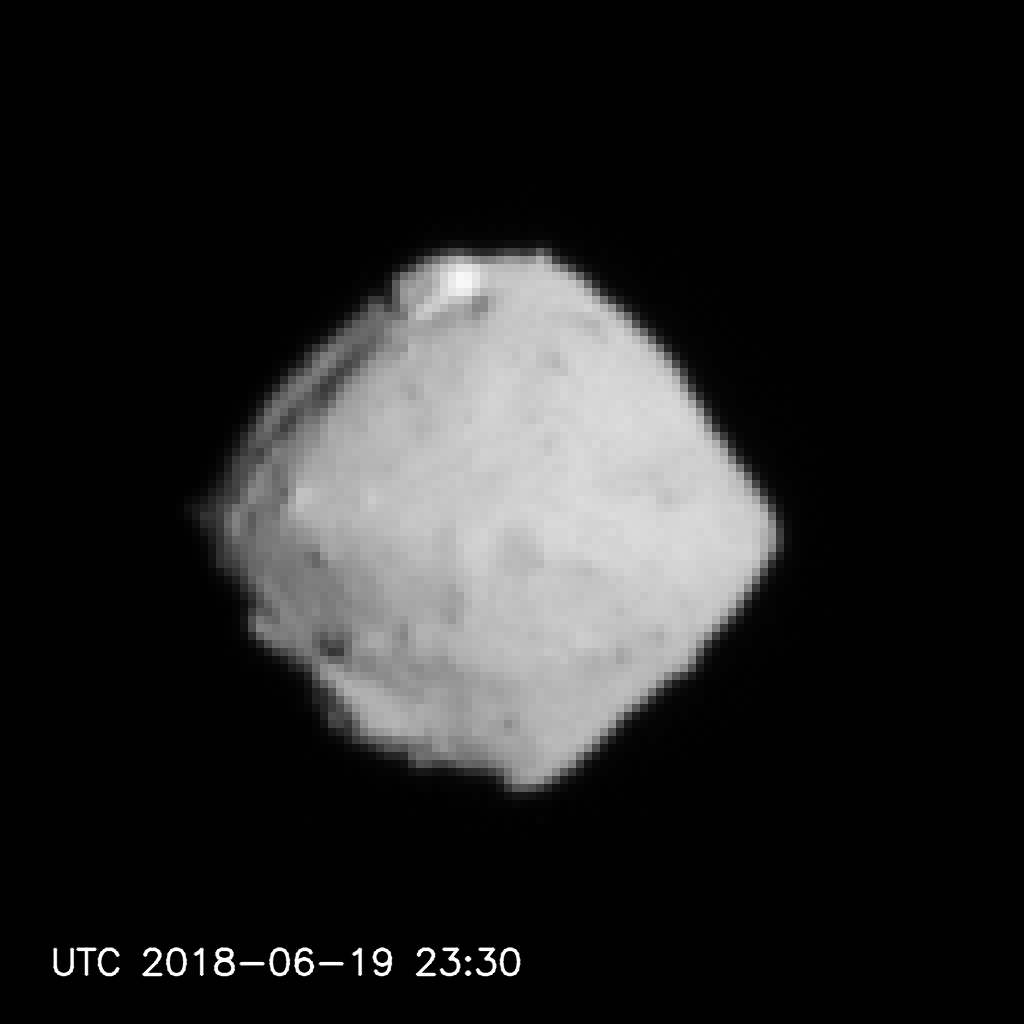
Asteroid Ryugu from a distance of about 40 kilometers. Details of the asteroid surface are now clear, giving food for thought about the best locations for surface operations. Credit: JAXA, University of Tokyo & collaborators.
Japan’s Haybusa2 is imaging asteroid Ryugu – and revealing a host of engineering challenges ahead for spacecraft operations.
“The shape of Ryugu is now revealed,” explains Hayabusa2 Project Manager, Yuichi Tsuda for the Japan Aerospace Exploration Agency (JAXA).

Japan’s Hayabusa2 is pulling up to Ryugu – a C-type asteroid – for detailed study.
Artwork: Akihiro Ikeshita
“From a distance, Ryugu initially appeared round, then gradually turned into a square before becoming a beautiful shape similar to fluorite [known as the ‘firefly stone’ in Japanese]. Now, craters are visible, rocks are visible and the geographical features are seen to vary from place to place. This form of Ryugu is scientifically surprising and also poses a few engineering challenges,” Tsuda adds.
Rotation axis
According to Tsuda, first of all, the rotation axis of the asteroid is perpendicular to the orbit. This fact increases the degrees of freedom for landing and the rover decent operations.
On the other hand, there is a peak in the vicinity of the equator and a number of large craters, which makes the selection of the landing points both interesting and difficult, Tsuda points out.
Formulate plans
“Globally, the asteroid also has a shape like fluorite (or maybe an abacus bead?). This means we expect the direction of the gravitational force on the wide areas of the asteroid surface to not point directly down. We therefore need a detailed investigation of these properties to formulate our future operation plans,” Tsuda explains in a Hayabusa2 posting.
“The Project Team is fascinated by the appearance of Ryugu and morale is rising at the prospect of this challenge,” Tsuda notes. “Together with all of you, we have become the first eyewitnesses to see asteroid Ryugu. I feel this amazing honor as we proceed with the mission operations.”

Credit: NASA/JPL
A fourth candidate landing site — “Midway” — has been added for evaluation by the engineering and science teams working on NASA’s Mars 2020 rover mission.
This informal site is midway between the Jezero delta landing site and the NE Syrtis landing ellipse. The other site under consideration is Columbia Hills, Gusev Crater, and home to Spirit, the no-longer operating NASA Mars robot.

Once again, stand by for another 7 minutes of terror as the Mars 2020 rover is lowered onto the Red Planet by the Sky Crane.
Credit: NASA/JPL
Two birds, one rover
Midway would have the same morphologic units as in NE Syrtis and would be a “relatively” short distance downhill to the Jezero site, explains John Mustard, Professor in Brown University’s Department of Earth Environmental and Planetary Sciences in Providence, Rhode Island.
“It has emerged from Mars 2020 science team members I believe brainstorming on possibly getting two birds with one rover,” Mustard told Inside Outer Space.
Final site selection
At the third landing site workshop for the Mars 2020 rover mission on Feb. 8-10, 2017, scientists narrowed down the list of potential places where NASA’s Mars 2020 rover may land. Three sites were selected to continue as landing site candidates: Columbia Hills, Jezero Crater, and NE Syrtis.

NASA Mars 2020 rover is designed to collect samples, store the specimens in tubes, then deposit the tubes on the surface for later pick-up.
Credit: NASA/ESA
Along with the Midway site, all landing spots are expected to offer acceptable risk standards for touchdown of the Mars 2020 rover.
Mars 2020 entry, descent and landing experts are currently evaluating landing site safety in support of the 4th landing site workshop this Fall, with final site selection expected in early 2019 by NASA Headquarters.
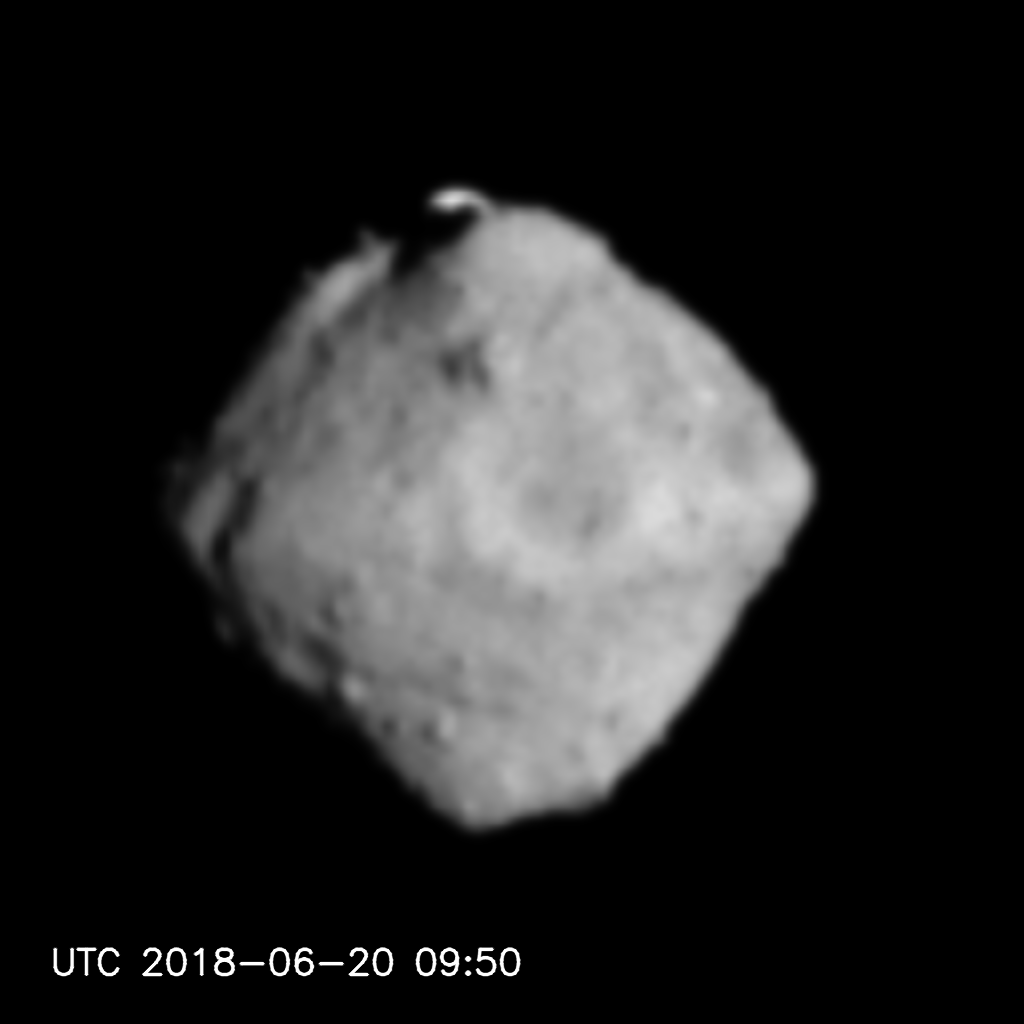
Credit: JAXA/Hayabusa2
As Japan’s Hayabusa2 closes in on asteroid Ryugu, project officials are taking hard looks at photos of the object.
In a recent report by Seiji Sugita, the Optical Navigation Camera Principal Investigator: “As we approached Ryugu and were able to distinguish individual features in the asteroid’s topology, it became clear that Ryugu has a land of rich terrain. Numerous clusters of rock roll on the surface.”
Large rocky mass
Among these, project scientists explain, is a large rocky mass roughly 500 feet (150 meters) across stands out on the upper part of Ryugu due to its brighter color (higher reflectivity).
The belt-shaped ring of peaks that surround the equator are also slightly brighter than their surroundings.
“This color difference may reflect a difference in material composition and the size of the particles that form the rock. We can also see many sunken regions that look like craters. These depressions may have been made in collisions with other celestial bodies. A structure that looks like a grove is also visible,” Sugita adds.

Credit: JAXA
Complex history
The existence of such varied topographies is an indication that Ryugu has undergone a complex evolutionary history.
It is generally believed that small asteroids that are less than 1km, such as Ryugu, were created fairly recently in the Solar System’s history (within several hundred million years) during the fragmentation of a larger parent body.
Credit: JAXA/Hayabusa2
“Ryugu’s terrain will tells us about the division from the parent body and the asteroid’s subsequent evolution,” Hayabusa2’s Sugita explains.

Today’s hearing on space situational awareness.
Rep. Mike Rogers (R-AL), Chairman of the House Armed Services Subcommittee on Strategic Forces, made the following remarks, as prepared for delivery, on today’s hearing: Space Situational Awareness – Whole of Government Perspectives on Roles and Responsibilities.
“Good morning. I’m excited to host this joint hearing with my sister committee from HSST on space situational awareness [SSA].
“Ever since the first satellite was launched into space in 1957 people here on earth have tried to track man-made space objects. During the Cold War space object tracking became an inherently DoD mission using ballistic missile early warning radars and the infrastructure associated with launch detection.

Clutter in the cosmos.
Credit: Used with permission: Melrae Pictures/Space Junk 3D
From tracking one small sphere in 1957 to over 20,000 objects in today’s space catalog we have come a long way. But for the most part we have still maintained space surveillance as a DoD mission, or at least a mission that is fulfilled using DoD funded-sensors.
On Monday President Trump directed the Chairman of the Joint Chiefs of Staff to begin the process necessary to establish a space force as the sixth branch of the armed forces and he also signed a space policy directive on space traffic management that is beginning to shift that paradigm.
Space force
Let me just briefly say that while this hearing is not on the Space Force, this has been one of my personal priorities for this subcommittee and I’m thrilled to have the continued support of the President in this endeavor.
From RAND report: The U.S.-China Military Scorecard: Forces, Geography, and the Evolving Balance of Power 1996–2017.
The document that President Trump signed directs the Department of Commerce to take responsibility for DoD’s existing commercial and foreign entities public SSA services. It advances SSA science and technology, improves SSA data standards and information sharing, and encouraging U.S. commercial leadership in SSA.
I’m encouraged by this effort. Space situational awareness is key to understanding what is in space and how it supports our military, economy, and society down here on earth. In the end, the DoD’s number one mission is to prepare for, fight, and win wars. And so the focus of this hearing will be what are the roles and responsibilities of the DoD, Commerce, and NASA in providing for SSA. In particular I’m focused on making sure that DoD requirements are being met by DoD systems, and civil and commercial requirements are met by other appropriate government agencies. To hear more about the recently signed directive we have excellent panel of witnesses, I thank each of you for taking time today to testify in front of us.”
Wilber Ross, Secretary of Commerce
https://docs.house.gov/meetings/AS/AS29/20180622/108426/HHRG-115-AS29-Wstate-RossW-20180622.pdf
Jim Bridenstine, Administrator, National Aeronautics and Space Administration
General John Hyten, Commander, United States Strategic Command
https://docs.house.gov/meetings/AS/AS29/20180622/108426/HHRG-115-AS29-Wstate-HytenJ-20180622.pdf
To view the hearing, go to:

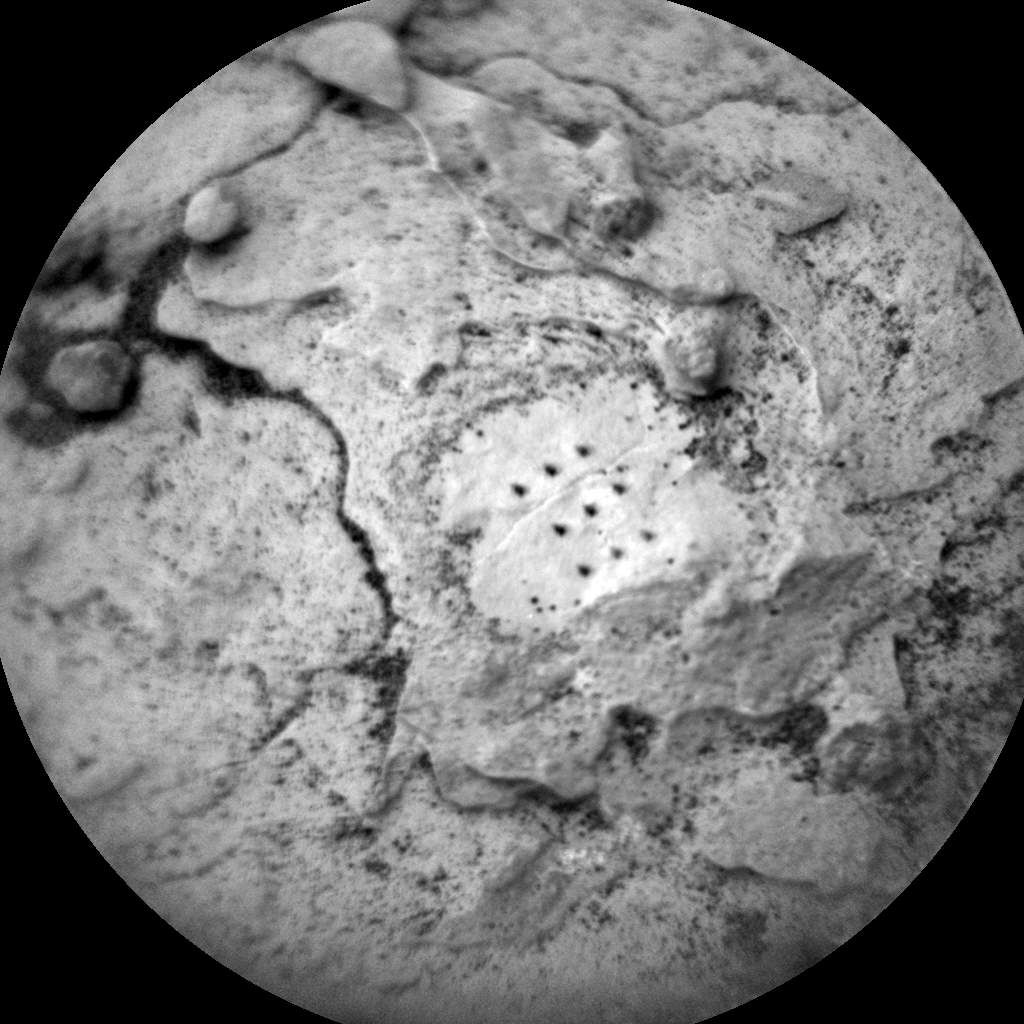
Curiosity Navcam Left B image acquired on Sol 2087, June 20, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2088 science duties.
Reports Mark Salvatore, a planetary geologist at the University of Michigan in Dearborn: “Over the past week or so, Curiosity has experienced increasingly dusty conditions in Gale crater. Unlike her older cousin Opportunity on the other side of the planet, Curiosity is not solar powered and, therefore, doesn’t suffer from the same power issues resulting from the darkening skies that Opportunity does. That allows Curiosity to play more of an active role in monitoring this dust storm from the ground and collecting important information to help scientists understand the evolution of such a weather phenomenon.”
Curiosity Navcam Right B photo taken on Sol 2087, June 20, 2018.
Credit: NASA/JPL-Caltech
Short drive
Salvatore explains that, after an unexpectedly short drive on Sol 2086 due to some “slippery” ground conditions, Curiosity made a very short drive in the Sol 2087 plan due to additional wheel slippage.
“In fact, Curiosity only recorded a drive of 17 millimeters,” Salvatore adds, “or about half an inch!” So the robot’s scenic view is very similar to landscape views in the near past.
Heading south
“The science team did a great job in taking advantage of this familiar landscape by planning several new measurements,” Salvatore points out.
Laser shots. Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 2087, June 20, 2018.
Credit: NASA/JPL-Caltech/LANL
The robot’s Chemistry and Camera (ChemCam) is to use its Laser Induced Breakdown Spectrometer (LIBS) capabilities to analyze targets named “Beaver Bay,” “Moose Mountain,” and “Breakwater,” while Mastcam and Navcam will dedicate their efforts primarily towards documenting these ChemCam targets and making environmental observations.
“The plan is to then drive away from this location heading south back up the Vera Rubin Ridge,” Salvatore explains. “Following the drive, we will make some additional environmental measurements and acquire our standard post-drive observations in preparation for our next day of planning on Friday.”

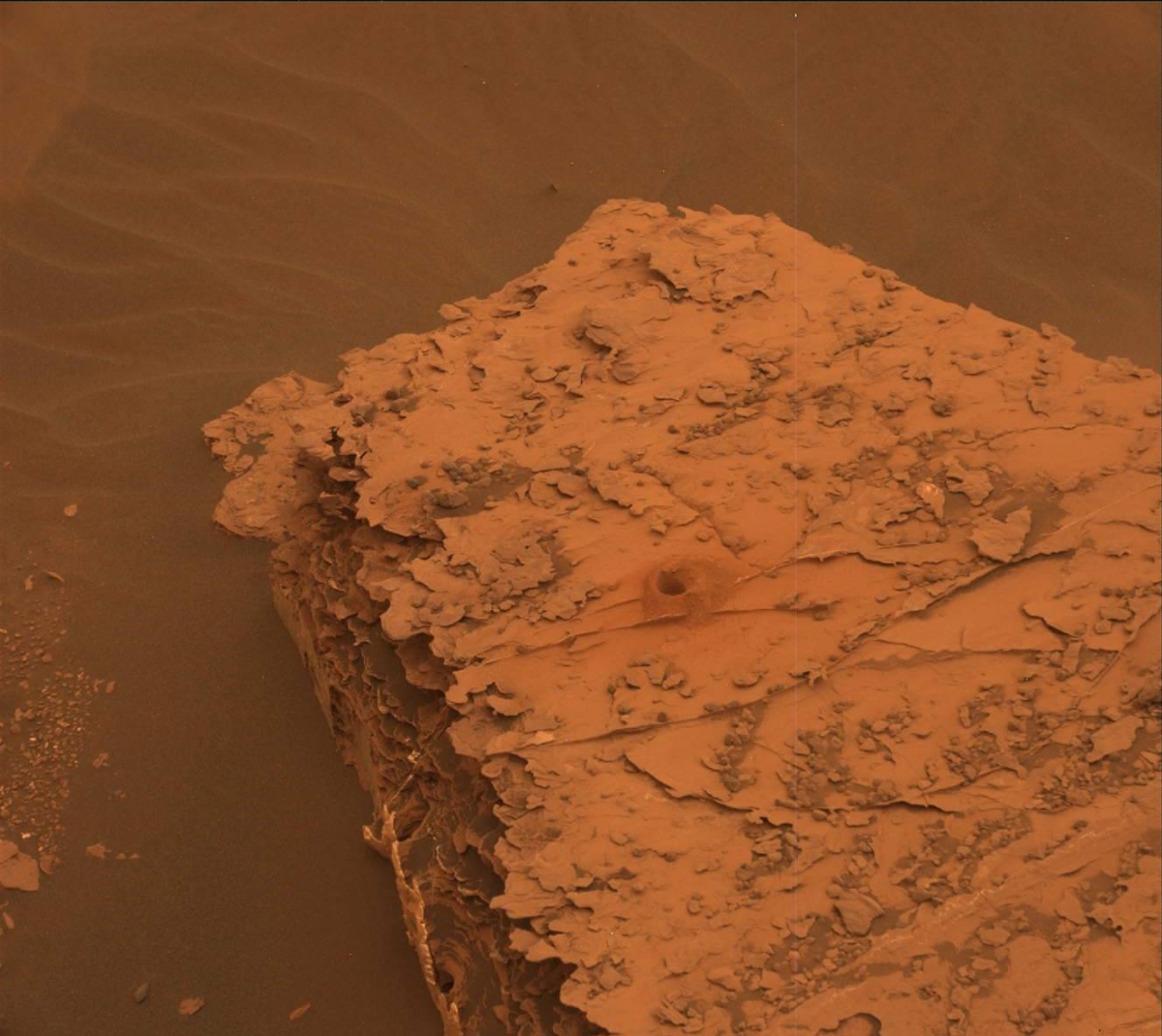
Check out the differences between Mastcam images of Duluth drill hole on Sol 2078 and image below taken on Sol 2084. Color contrast has decreased significantly as the air has become redder and sunlight is scattered more and more as the dust storm continues to evolve. Credit: NASA/JPL-Caltech/MSSS
Looking into thin air
A really “cool observation” is on tap using ChemCam LIBS observation of thin air, Salvatore says. “The idea is to target the ChemCam laser into the dusty martian air. By observing the amount of dispersion of the laser pulse, the team will be able to make some really cool observations and estimations of atmospheric dust abundances. This is equivalent to shining a laser pointer into the sky during a foggy day, or in a dusty classroom. It’s a new tool available to Curiosity thanks to some really ingenious planning by the scientists and engineers, and today is the first day that we will make this observation, so stay tuned!”
Sunlight scattering
Like overcast days here on Earth, Salvatore adds, there are very few shadows currently observed in Gale crater when the sun is overhead. “The red martian dust in the atmosphere is scattering nearly all observed sunlight, creating dim and diffuse conditions.”
It’s clear that the amount of color contrast has decreased significantly as the air has become redder and sunlight is scattered more and more. “We’ll continue to monitor the amount of atmospheric scattering as the dust storm evolves over the next few weeks,” Salvatore concludes.
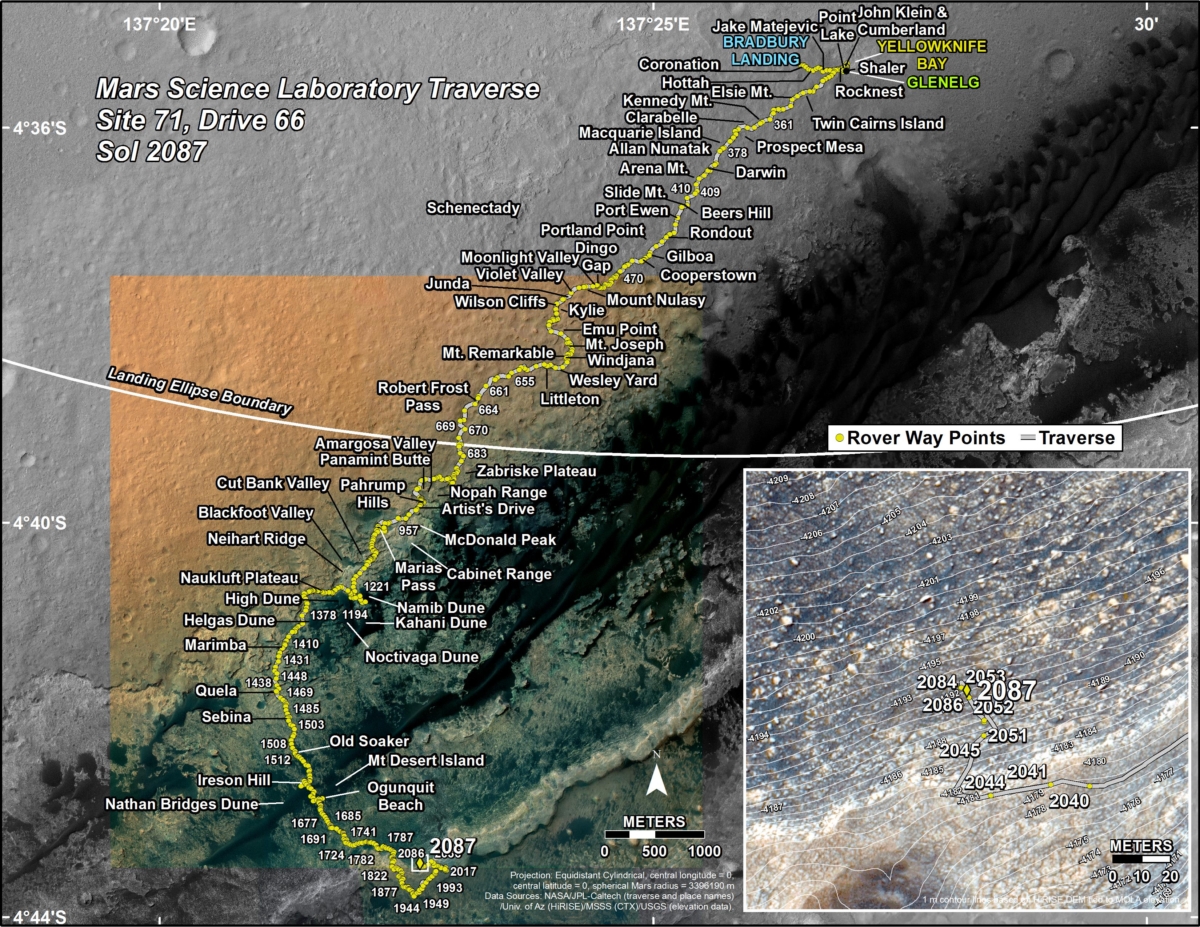
Credit: NASA/JPL-Caltech/Univ. of Arizona
New road map
Meanwhile a new Curiosity traverse map through Sol 2087 has been issued.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2087 Martian day, or sol, of the rover’s mission on Mars (June 20, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 1 kilometer (~0.62 mile).
From Sol 2086 to Sol 2087, Curiosity had driven a straight line distance of about 0.06 feet (0.02 meters), bringing the rover’s total odometry for the mission to 11.85 miles (19.08 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.

Credit: ESAshop
In the wake of yesterday’s release of a study on the threat of Earth getting smacked by a destructive space rock, you can make a fashion statement.
The European Space Agency’s ESAshop is offering planetary defender accessories, “wear and care” items that showcase your protect the Earth status.

Credit: ESAshop
All items are printed on demand and delivered to your door, wherever you are in the world.
Space rock items are part of the “Earthpositive Collection.”
E-commerce platform
The ESAshop is collaboration with the German company, Spreadshirt which, with a focus on sustainability, was founded in 2002. Spreadshirt is an e-commerce platform for on-demand printing of clothing and accessories.
ESA provides the designs for the products in the ESAshop, and Spreadshirt takes care of all the rest.
For a look at all the ESAshop offerings, go to:
https://shop.spreadshirt.net/esashop/

Credit: ESAshop
Report available
So put on a T-shirt, sip a coffee from your planetary defender cup…stay calm, sit back and read:
National Near-Earth Object Preparedness Strategy and Action Plan

Close-calls in the cosmos.
Credit: Naval Research Laboratory (NRL)
That new space traffic management policy just signed by U.S. President Donald Trump may not be enough to prevent space objects from crashing into each other.
That’s the ruling of Purdue aerospace professor Carolin Frueh.
Research hasn’t caught up yet with how to reliably characterize and continuously track everything ranging from satellites and rocket boosters to tiny debris. Even if all objects were characterized, most of them can’t control their movement, so crashes are still unpredictable.
The number of objects in space and the frequency of traffic jams also keep increasing, making research from five years ago irrelevant.

In-orbit explosions can be related to the mixing of residual fuel that remain in tanks or fuel lines once a rocket stage or satellite is discarded in Earth orbit. The resulting explosion can destroy the object and spread its mass across numerous fragments with a wide spectrum of masses and imparted speeds.
Credit: ESA
Congested, unpredictable
In a Purdue press release, Frueh, assistant professor of aeronautics and astronautics, suggests that space traffic is much more congested and unpredictable than air traffic here on Earth.
“For air traffic, there are multiple radars tracking several airplanes per hour, but for space traffic, only a few sensors on earth are tracking about 20,000 known objects,” Frueh explains. “If we include the objects that are smaller in size, then we’re talking about 100,000 or more objects that are of interest – and all of them different dimensions.”
Open-access catalog
Trump’s Space Policy Directive 3 calls for establishing an open-access data repository of all known space objects.
Currently, U.S. Strategic Command via the website space-track.org offers a public catalog of around 16,000 unclassified objects of known origin, explains Frueh, but research hasn’t caught up yet with how to reliably characterize and continuously track everything ranging from satellites and rocket boosters to tiny debris.

Chunk of junk zips by the International Space Station.
Credit: NASA
“Maintaining an open-access catalog with at least basic information is crucial for the sustainable use of space, but currently the quality of the data is not disclosed – severely hindering development of solutions for space traffic management,” Frueh points out.
Paper studies
“The directive enforces national space debris mitigation standards and best practices, which could mean making it finally mandatory for spacecraft to burn up in the Earth’s atmosphere within 25 years of shutting down,” Frueh said.
“This new legislation also commits the U.S. to exploring active space debris removal, actively taking down defunct satellites so that they no longer pose a risk to other objects. Active removal has so far only been explored theoretically in paper studies.”

Pre-launch photo of RemoveDEBRIS satellite.
Credit: SSC/Max Alexander
NanoRacks successfully deployed the RemoveDEBRIS satellite today from the International Space Station.
Deployment made use of the company’s commercially developed Kaber Microsatellite Deployer. RemoveDEBRIS is the largest satellite to ever be deployed from the ISS – designed, built and manufactured by a consortium of leading space companies and research institutions, led by the Surrey Space Center at the University of Surrey and funded in part by the European Union Seventh Framework Program.
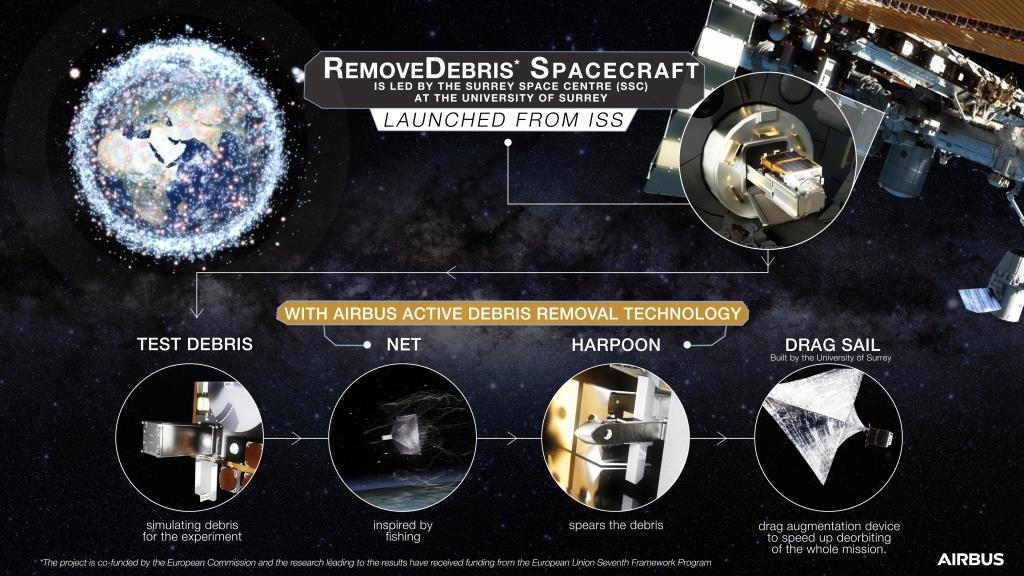
Credit: Airbus Defence and Space

Onboard the ISS, crewmember readies RemoveDEBRIS for launch from the orbiting facility.
Credit: NASA/NanoRacks
Four experiments
The RemoveDEBRIS mission will perform four experiments, which will be tested on two CubeSats to-be-deployed from the larger satellite, acting as artificial targets.
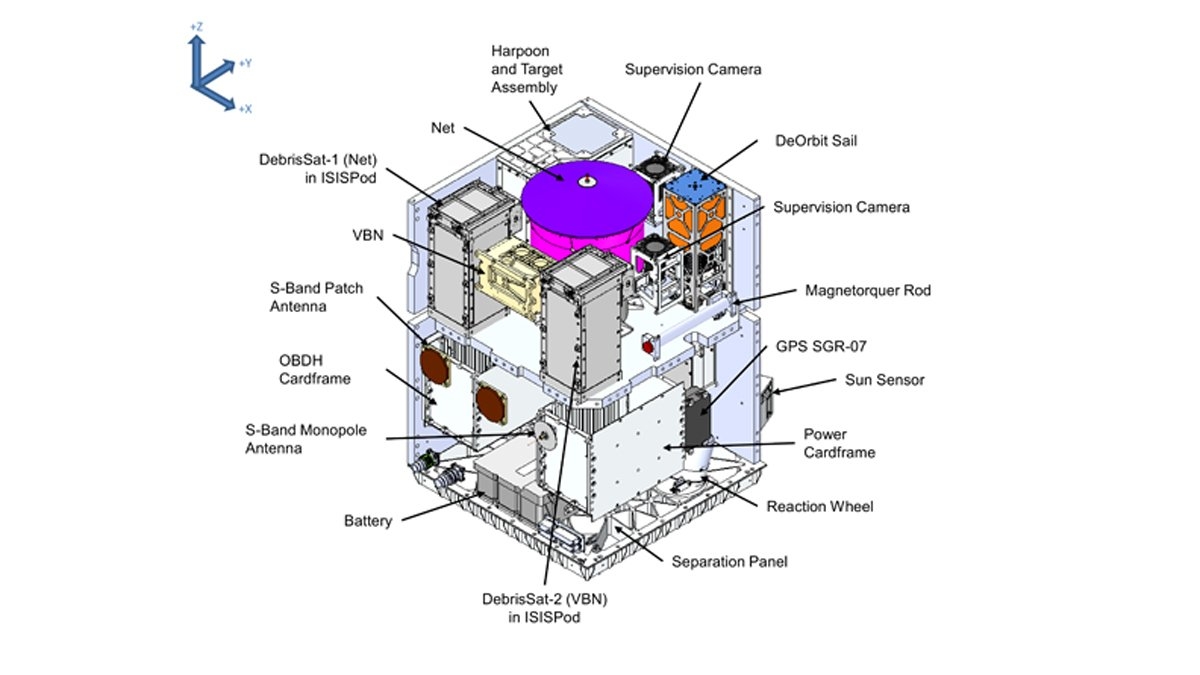
Credit: Surrey Space Centre (SSC)
These experiments include both the first harpoon capture in orbit and a net that will be used on a deployed target. The team will also test a vision-based navigation system that uses cameras and LiDaR technology to observe CubeSats that will be released from the main spacecraft.

Airlocked and loaded!
Credit: NASA/NanoRacks
Lastly, the RemoveDEBRIS craft will deploy a large drag sail that will cause the orbit of the spacecraft to rapidly decay until making a destructive plunge into the Earth’s atmosphere.
Video
RemoveDEBRIS was launched to the Space Station via NanoRacks on the 14th SpaceX Commercial Resupply Mission in early April.
For a video on this creative mission, go to:

