Author Archive

Credit: Astrobotic Technology, Inc.
It’s a good day for privately-backed lunar landers.
NASA’s Science Mission Directorate (SMD) has released a Request for Information (RFI) so the space agency can assess proposals for Lunar Surface Instrument and Technology Payloads.
This NASA program element would solicit flight payloads that do not require significant additional development.
Science goals, knowledge gaps, tech demos
Investigations are being sought that address the science goals of any of four SMD space agency divisions: Planetary, Earth Science, Heliophysics, and Astrophysics.
Also being eyed are flight payloads for tackling Strategic Knowledge Gaps of the Human Exploration and Operations Mission Directorate (HEOMD) or any technology demonstration goals of the Space Technology Mission Directorate (STMD) that advance capabilities for science, exploration, or commercial development of the Moon.

Private sector Moon rover.
Credit: Carnegie Mellon/Mark Maxwell
Flight opportunity
The first lander flight opportunity could occur as early as 2020. As such, proposals should “convincingly demonstrate” that the proposed payload will be ready to support an aggressive launch schedule.
The deadline for this RFI is September 27, 2018.
“This is yet another important development for our community,” said Dan Hendrickson, Vice President of Business Development at Astrobotic Technology, Inc. in Pittsburgh, Pennsylvania. They are among several groups striving to give the Moon the business. “NASA highly encourages payload teams to reach out to commercial lander service providers directly,” Hendrickson added in an Astrobotic statement.
For detailed information, go to:

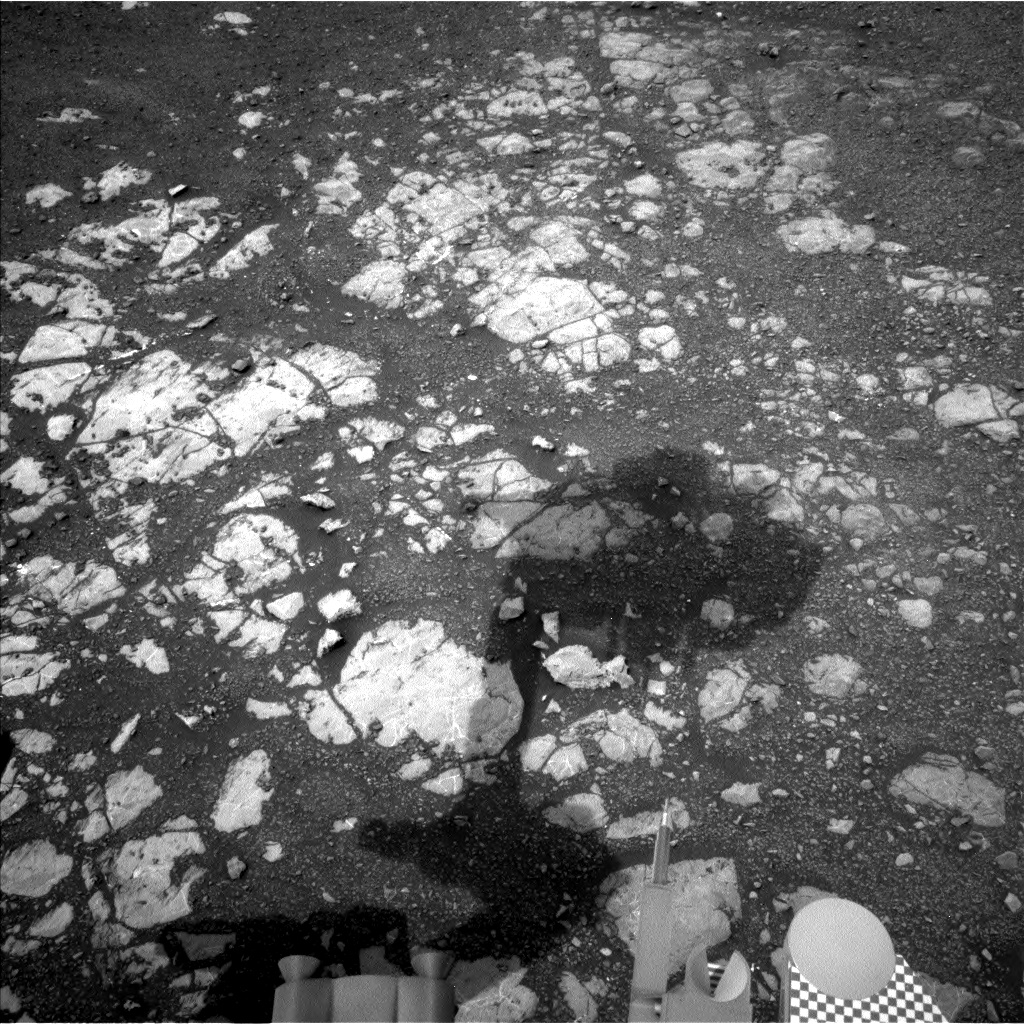
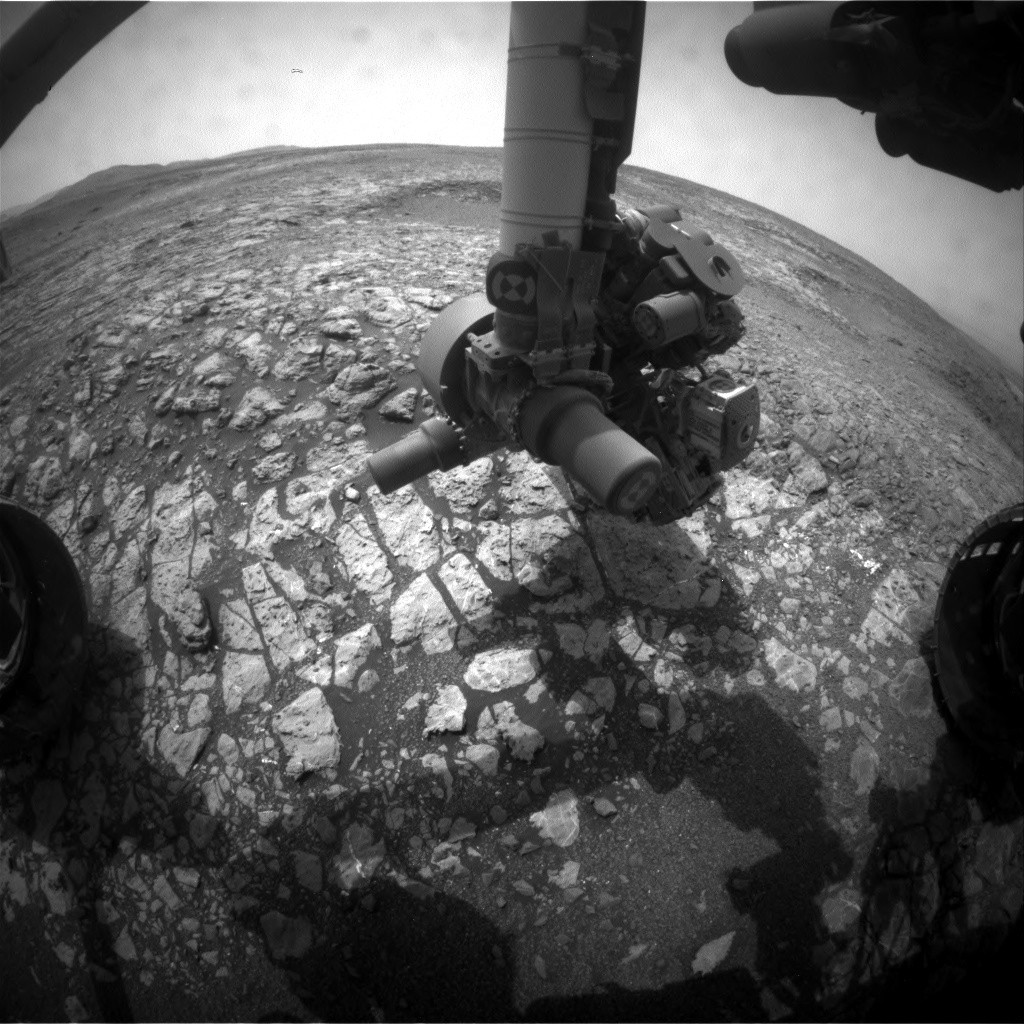
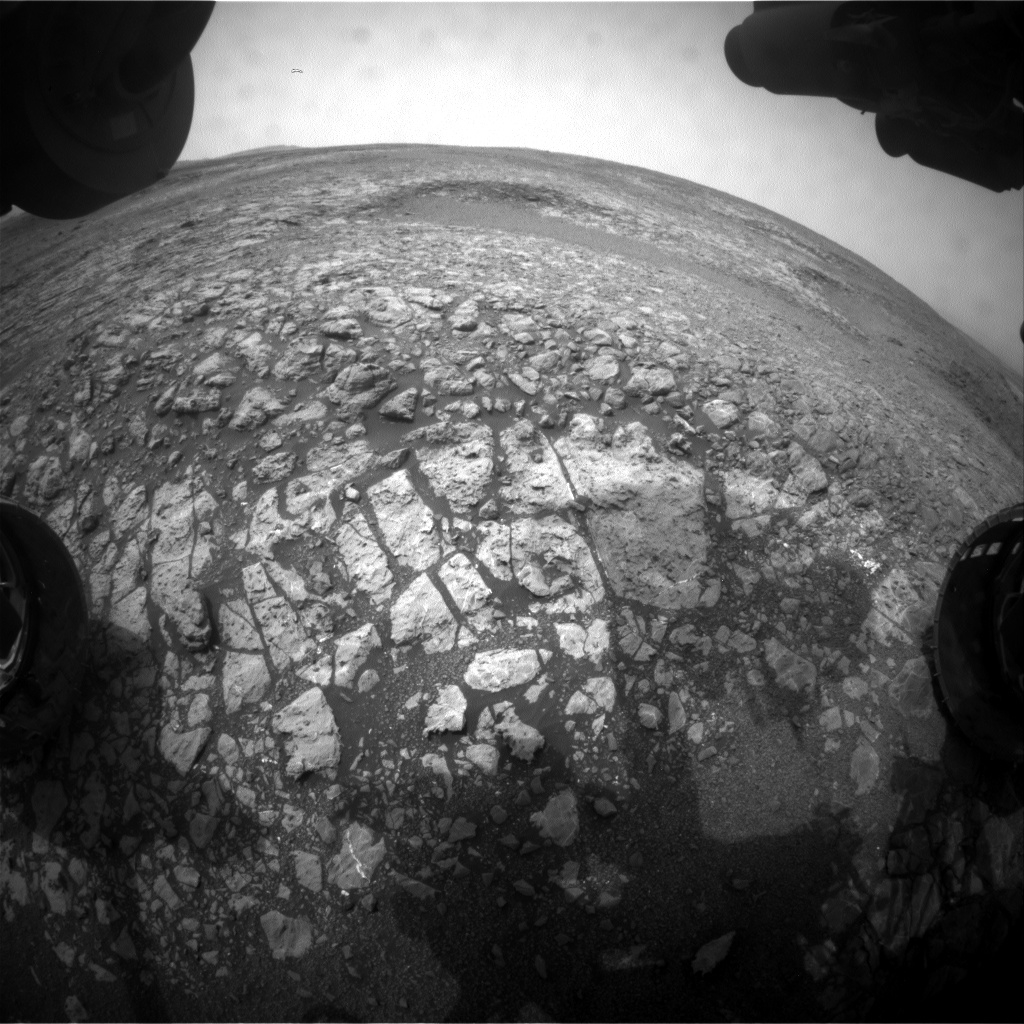
Curiosity Front Hazcam Left B image acquired on Sol 2168, September 11, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is performing Sol 2169 tasks.
The robot’s drill campaign at “Inverness” is starting, reports Kristen Bennett, a planetary geologist at the USGS in Flagstaff, Arizona.
“In the weekend plan Curiosity drove to an area that the team thought would be a good location for the next drill site on Vera Rubin Ridge. The drive was a success, and there is a block named ‘Inverness’ in the center of the workspace that was selected to be the next drill target,” Bennett explains.

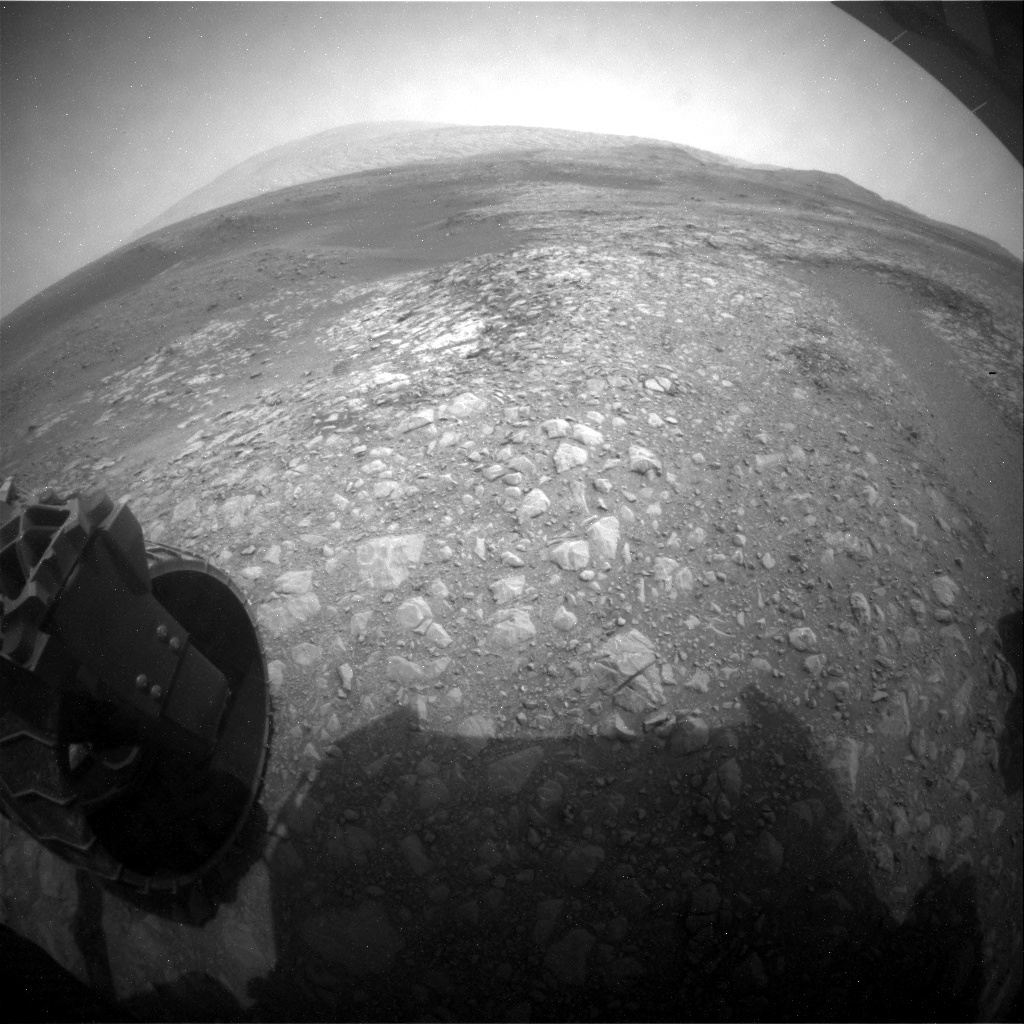
Curiosity Navcam Left B photo taken on Sol 2168, September 11, 2018.
Credit: NASA/JPL-Caltech
Two-sol plan
The two-sol plan (Sol 2168-2169) focuses on characterizing Inverness in preparation for the drill campaign. This includes removing dust from the surface of the rock with the Dust Removal Tool, as well as taking Mars Hand Lens Imager (MAHLI) images, Alpha Particle X-Ray Spectrometer (APXS) measurements, a Chemistry and Camera (ChemCam) Laser Induced Breakdown Spectroscopy (LIBS) observation, and a Mastcam multispectral observation of Inverness.
“In addition to all of the measurements of Inverness, Curiosity will begin taking change detection images,” Bennett adds. “The rover will be sitting in one spot for some time during the drill campaign, so this is a good opportunity to see if any of the sand around Curiosity is being moved around by the wind.”

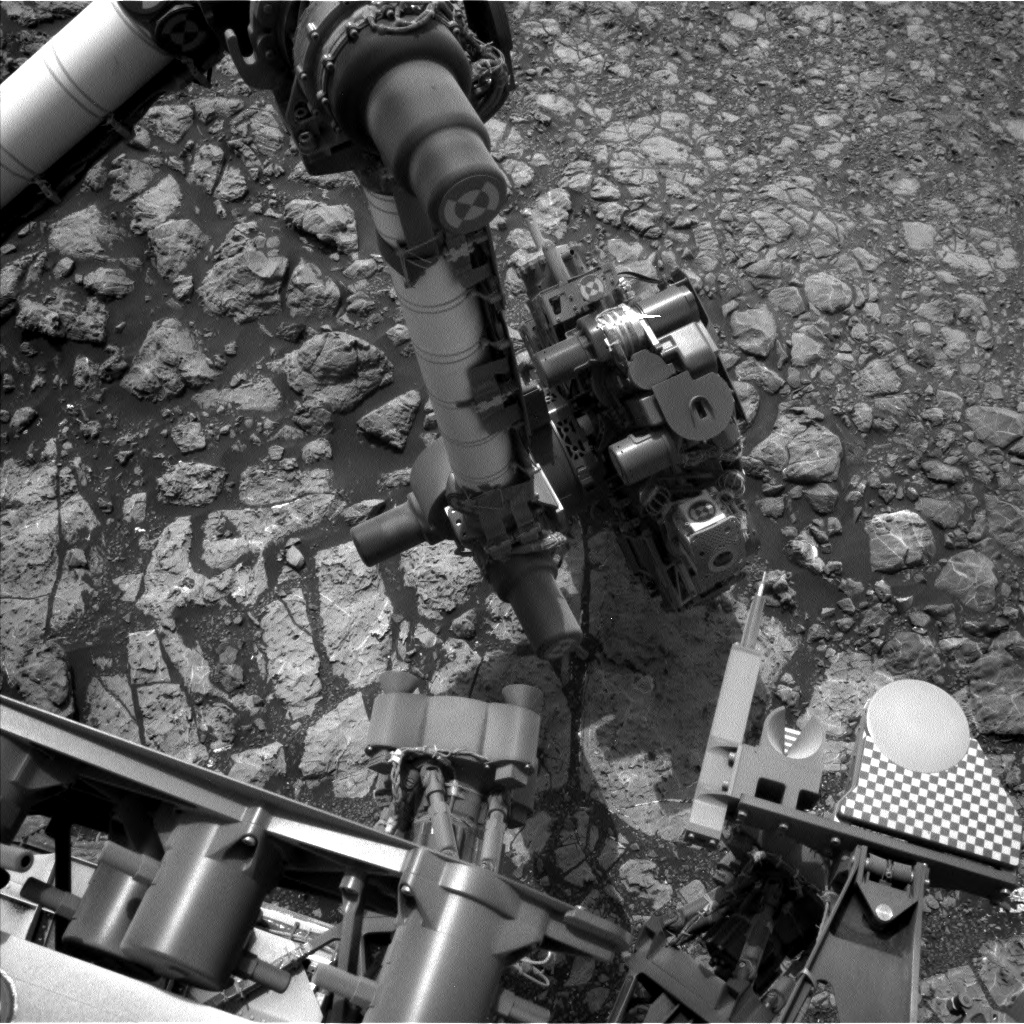
Dust Removal Tool readies targeted rock for drilling. Curiosity Mars Hand Lens Imager (MAHLI) image produced on Sol 2168, September 11, 2018. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
The current plan also includes a Mars Descent Imager (MARDI) twilight image and Mastcam images of “Sandend” and “Skene.”
Putting holes in rocks
“But wait! There’s more! This plan also includes a Mastcam image of the target “Stoneyburn,” a Navcam dust devil survey,” Bennett adds, along with MAHLI night time images of the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) inlet.

Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) inlet.
Curiosity Mars Hand Lens Imager (MAHLI) photo taken on Sol 2168, September 12, 2018.
Credit: NASA/JPL-Caltech/MSSS
“This full 2-sol plan will set Curiosity up to start drilling into the next target on Vera Rubin Ridge later this week,” Bennett concludes. “Just another day planning to put holes in rocks on Mars!”

Credit: Baker Institute for Public Policy
Making high-quality satellite imagery available to the broader global energy research community can help crack open China’s “Great Wall of Secrecy” and improve data transparency and insights into the inner workings of the world’s second-largest crude oil market.
A new study — Using Satellite Data to Crack the Great Wall of Secrecy Around China’s Internal Oil Flows – has been issued by Rice University’s James A. Baker III Institute for Public Policy.
Data gathering sensors
Even if data gatherers on the ground in China can be constrained by the risk of severe physical penalties, Chinese officials can do little to prevent remote sensors in space from gathering data on energy sector activities.
They suggest that better data transparency would benefit oil producers and consumers both within and outside of China.

Satellite imagery of oil activity in China.
Credit: Baker Institute for Public Policy/DigitalGlobe, Google Earth
Time-lapse imagery
“Satellites passing repeatedly over the same area can provide a time-lapse image series that can help identify the construction of roads and pipelines, well completions, drilling rig movement, and other important energy-related activities,” the authors explain.
The new study was written by Gabriel Collins, J.D., Baker Botts Fellow in Energy & Environmental Regulatory Affairs, Center for Energy Studies and Shih Yu (Elsie) Hung, Research Associate, Center for Energy Studies.
To view a copy of the document — Using Satellite Data to Crack the Great Wall of Secrecy Around China’s Internal Oil Flows — go to:
https://www.bakerinstitute.org/media/files/files/5b820dd5/bi-report-090718-ces-satellitechinaoil.pdf
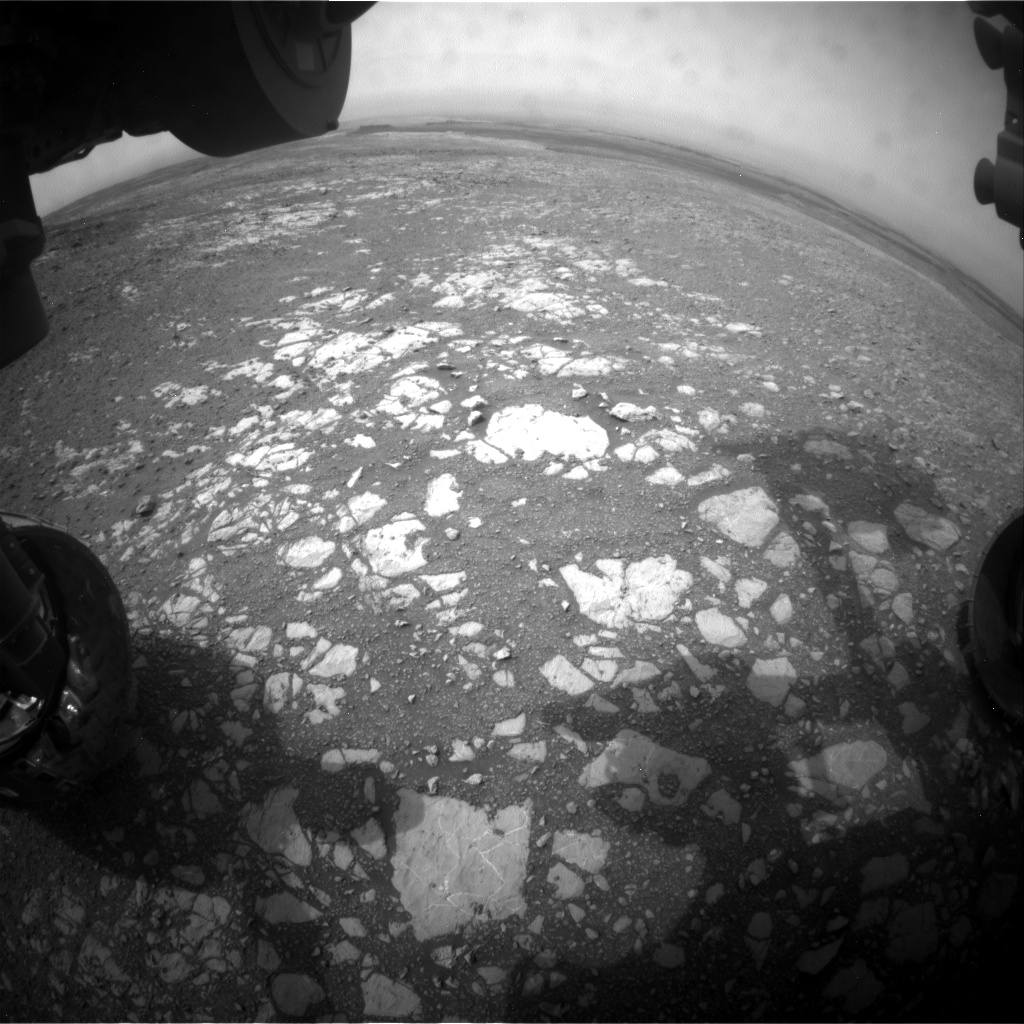
Curiosity Front Hazcam Left B photo taken on Sol 2167, September 10, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2168 tasks.
Reports Sean Czarnecki, a planetary geologist at Arizona State University in Tempe: “Curiosity’s last plan didn’t quite get our intrepid rover close enough to our next potential drill location in the gray bedrock that is visually distinct on this part of Vera Rubin Ridge.”

Curiosity Mastcam Left image acquired on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech/MSSS
This weekend’s plan was intended to be “Drill Sol 1,” but since it would require at least another short drive to drill, Czarnecki adds, “the team decided to choose another target a little further away that will provide a better science return. So the weekend plan now includes a short drive to our new drill target.”
Targets
Before the drive, the rover’s Chemistry and Camera (ChemCam) will measure the chemistry of the targets “Great Bernera,” “Great Glen,” and “Great Todday;” Mastcam will take images of these same targets including a multispectral observation of Great Todday; and the Alpha Particle X-Ray Spectrometer (APXS) will measure the chemistry of targets “Trollochy,” “Burn O Vat,” and “Portobello.”

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech/MSSS
“These observations are intended to document the compositional diversity of the gray and red bedrock at this location by documenting the transition from gray to red,” Czarnecki points out.
Compositional layering
In addition, the Dynamic Albedo of Neutrons (DAN) instrument will make a total of 60 minutes of active measurements before the drive.
“DAN active experiments emit neutrons that interact with the subsurface and then measure the time-of-flight and energy of neutrons that return to the rover. These data allow us to interpret compositional layering and abundances of water bound in minerals in the martian subsurface,” Czarnecki explains.

Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2167, September 10, 2018.
Credit: NASA/JPL-Caltech/LANL
Weekend science
Following Curiosity’s drive, ChemCam has two more sets of chemical measurements on Autonomous Exploration for Gathering Increased Science (AEGIS) targets. AEGIS is novel autonomy software.
APXS will measure the argon abundance in the martian atmosphere, and DAN will take another standard active measurement. Also in the plan are standard DAN passive and environmental monitoring activities with the Rover Environmental Monitoring Station (REMS), Radiation Assessment Detector (RAD), Mastcam, and Navcam instruments.
Curiosity Navcam Left B photo acquired on Sol 2167, September 10, 2018.
Credit: NASA/JPL-Caltech
“It’s a weekend packed full of science,” Czarnecki concludes, “to set up our next drill campaign!”
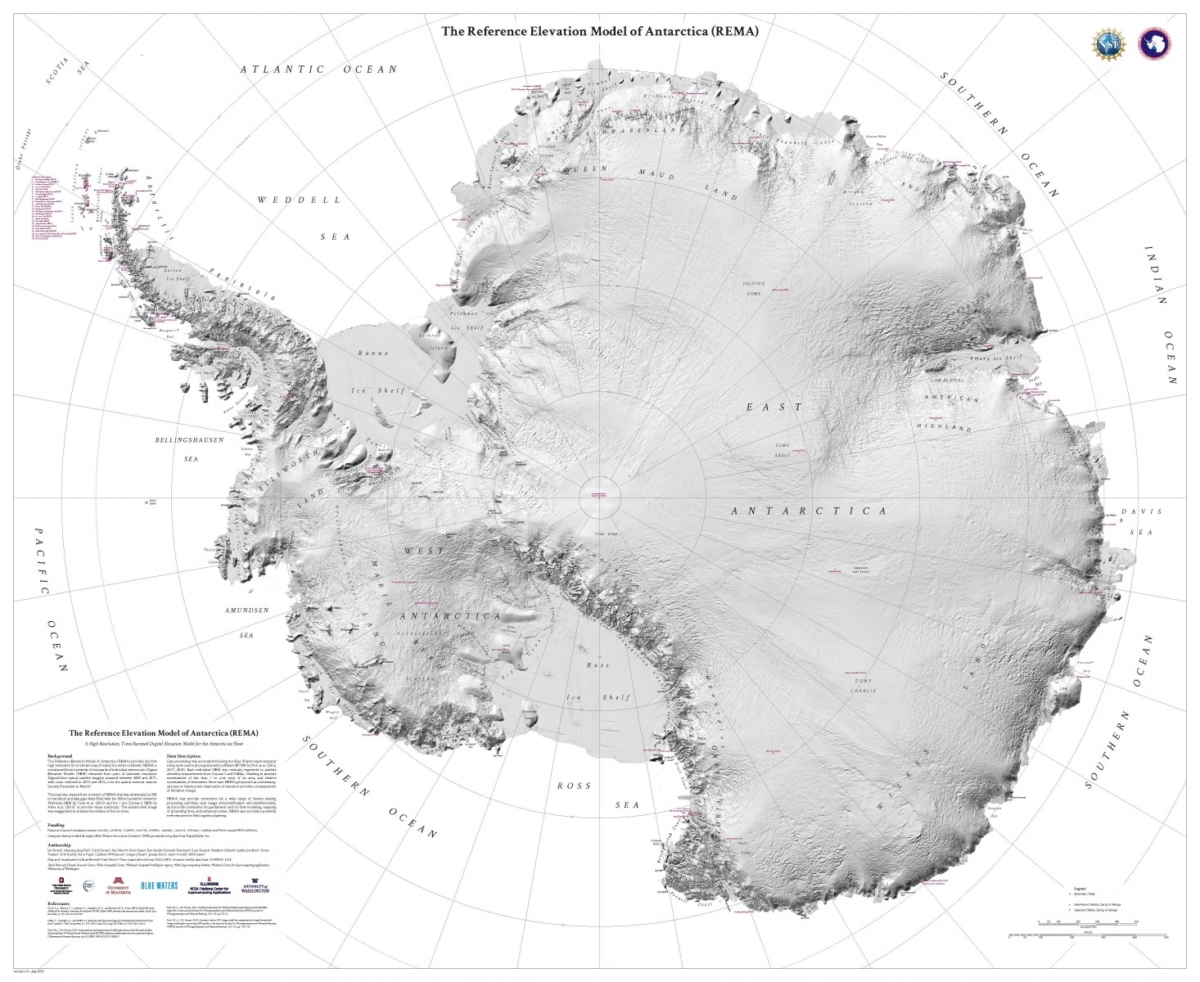
Tapping the use of high-flying satellites, scientists have released the most accurate, high-resolution terrain map of Antarctica ever created.
The mapping project, called The Reference Elevation Model of Antarctica (REMA), will change science in Antarctica.
The new map has a resolution of 2 to 8 meters, compared to 1,000 meters, which was typical for previous maps.
“At this resolution, you can see almost everything. We can actually see variations in the snow in some places. We will be able to measure changes in the surface of the continent over time,” said Ian Howat, professor of earth sciences and director of the Byrd Polar and Climate Research Center at The Ohio State University.
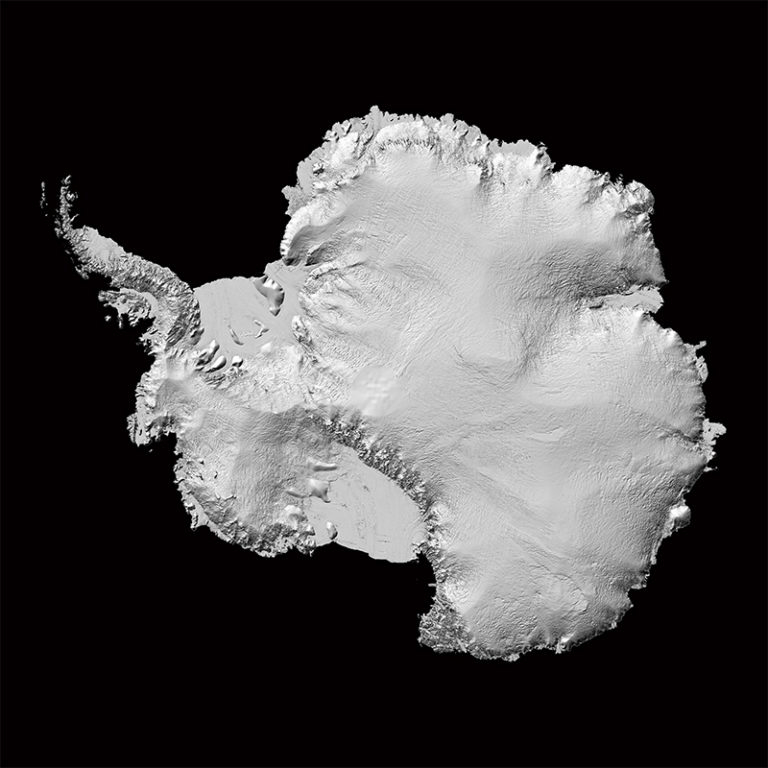
A hillshade (exaggerated) rendering of REMA Release 1. Credit: Polar Geospatial Center
Classified spacecraft
The project began with images taken from a constellation of polar-orbiting satellites – including classified spacecraft — that passed over areas of Antarctica an average of 10 times to take photographs.
In addition to the images, the REMA project needed software developed by Howat and M.J. Noh of the Byrd Center that processed the data on high-performance supercomputers.
Other collaborators included the Polar Geospatial Center at the University of Minnesota and the University of Illinois, which provided the Blue Waters supercomputer that processed the images.
Support for REMA was provided by the U.S. National Geospatial-Intelligence Agency and the National Science Foundation.

Large-format prints of the Reference Elevation Model of Antarctica. Credit: Paul Morin, Polar Geospatial Center
Decade of effort
Antarctica is now officially the most well mapped out region, or continent for that matter, in the world. Drawing upon hundreds of thousands of images collected by polar-orbiting satellites between 2009 and 2019, a consortium of scientists has released the first version of the Reference Elevation Model of Antarctica (REMA).
ArcticDEM and REMA are public-private initiatives to automatically produce high-resolution, high-quality digital surface models of the Arctic and Antarctic using optical stereo imagery, high-performance computing, and open-source photogrammetry software.
The new map covers approximately 98% of Antarctica to a latitude of 88 degrees south — just a small area right near the South Pole is missing due to a lack of satellite coverage. The resolution is a mind-boggling 2-8 meter — it means we can now see objects down to the size of a car, and even smaller in some areas.
To dive in and look at Antarctica, go to this University of Minnesota site:
https://www.pgc.umn.edu/data/rema/
Also, take a look at this Ohio State University video at:
Also, put on a parka and go to:
http://www.maps.arcgis.com/apps/View/index.html?appid=86a9728459aa4d18b4444b74d330832e/

Credit: CSIS/Screengrab
This informative panel met today, Monday, September 10 at the Center for Strategic and International Studies (CSIS) Headquarters in Washington, D.C.
This event was webcast live.
Moving forward
The discussion focused on President Trump’s newly announced Space Force proposal.
With Vice President Pence’s announcement of the Department of Defense’s report on “Organizational and Management Structure for the National Security Space Components of the Department of Defense,” the administration is moving forward with plans to establish a Space Force.

Space Force announcement at packed Pentagon auditorium.
Credit: DoD/Screengrab
Panelists discussed what a Space Force means for DoD and the future of national security space.
Panelists
This discussion featured:
Robert Work, Former Deputy Secretary of Defense
Gen Robert Kehler (USAF Ret.)m Former Commander, U.S. Strategic Command (USSTRATCOM)
Letitia Long, Former Director of the National Geospatial-Intelligence Agency
Sean O’Keefe, CSIS Senior Advisor and former NASA Administrator
The event was moderated by John J. Hamre, President and CEO of the Center for Strategic and International Studies.
To view this event, go to:
https://www.csis.org/events/securing-space-discussion-us-space-force
Curiosity Front Hazcam Right B image acquired on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech
NASA’s Curiosity rover is now performing Sol 2167 duties.
The plan called for the rover to make a “bump” – that is, a drive of roughly 50 feet (15 meters) reports Lucy Thompson, a planetary geologist at the University of New Brunswick; Fredericton, New Brunswick, Canada.
Curiosity Rear Hazcam Right B photo taken on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech
That drive was to place the robot, Thompson explains, “for an attempt at drilling an interesting grey colored patch of bedrock,” identified from orbit within the Jura member of the Murray formation on the Vera Rubin Ridge, referred to as “Loch Eriboll.”
“We want to figure out how these patches of bedrock differ from the surrounding tan colored rocks, more typical of what we see from orbit,” Thompson adds.
Curiosity Navcam Left B image taken on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech
Broken up, smaller pieces of rock
Curiosity had the potential to do a “touch and go” in the plan, whereby it would unstow its robotic arm and use the Alpha Particle X-Ray Spectrometer (APXS) and Mars Hand Lens Imager (MAHLI) instruments to examine the chemistry and texture of a target close-up, before driving away.

Curiosity Navcam Left B image taken on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech
“However, the workspace consists of a lot of broken up, smaller pieces of rock and we already have a lot of compositional and textural information of similar rocks,” Thompson adds. The ability to use the arm is instead being utilized to acquire MAHLI close-up imaging of the Rover Environmental Monitoring Station (REMS) ultra-violet sensor.
Curiosity Navcam Right B photo acquired on Sol 2166, September 9, 2018.
Credit: NASA/JPL-Caltech
This is requested periodically to check for dust and the general health of the sensor.
Targets for investigation
“We decided to concentrate our efforts on the bump and some remote science observations using instruments situated on the rover’s mast. We selected 4 bedrock targets for investigation with ChemCam (“The Law,” “Eathie,” “The Minch” and “Windy Hills”), to monitor compositional variation, accompanied by Mastcam documentation of those targets,” Thompson explains.
Mastcam mosaics are being acquired of the “Laithach” area where scientists observe a potential contact between the grey and tan rocks, and the “Loch Eriboll” area, which will include multiple filters to look at the spectral properties of the different rocks.
New workspace
“We then bump to our potential drill location,” Thompson notes, followed by imaging of the new workspace and a 20 minute Dynamic Albedo of Neutrons (DAN) Active measurement.

Curiosity Mastcam Right image acquired on Sol 2165, September 8, 2018.
Credit: NASA/JPL-Caltech/MSSS
Post-drive, there are two untargeted Chemistry and Camera (ChemCam) Autonomous Exploration for Gathering Increased Science (AEGIS) software activities to look at bedrock composition, standard REMS and DAN passive, Navcam imaging. Also on the plan is use of the Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument (CheMin) vibe and dump sample (after X-ray diffraction on the previously drilled “Stoer” material), Mars Descent Imager (MARDI) (used to document the ground immediately beneath the rover wheels) and SAM Electrical Baseline Test (to periodically monitor SAM’s electrical functions).
Thompson concludes that it’s a busy 2-sol plan to hopefully set up Curiosity’s drilling duties.
Curiosity Mars Hand Lens Imager (MAHLI) Sol 2166 September 9, 2018. MAHLI is located on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSSling duties.

Image of the Reiner Gamma lunar swirl from NASA’s Lunar Reconnaissance Orbiter.
Credits: NASA LRO WAC science team
They have been characterized as tattoos on the Moon.
Better known as lunar swirls, they resemble bright, snaky clouds painted on the Moon’s dark surface. The most famous, called Reiner Gamma, is about 40 miles long.
Most lunar swirls share their locations with powerful, localized magnetic fields. The bright-and-dark patterns may result when those magnetic fields deflect particles from the solar wind and cause some parts of the lunar surface to weather more slowly.
But the cause of those magnetic fields, and swirls themselves, is a puzzler.
Near‐surface magnetic fields
New research on what kind of geological feature could produce these magnetic fields has been done by Douglas Hemingway of the Department of Earth and Planetary Science, University of California, Berkeley. Co-author of the work is Sonia Tikoo of the Department of Earth and Planetary Sciences, State University of New Jersey, Rutgers. The work is published in the Journal of Geophysical Research – Planets, a journal of the American Geophysical Union.
“The length scales of swirls are effectively telling us about the structure of near‐surface magnetic fields on scales that are finer than what can be measured from lunar orbit,” the research team reports.

Sonia Tikoo, an assistant professor in Rutgers-New Brunswick’s Department of Earth and Planetary Sciences, looks at lunar rock samples in a Petri dish.
Credit: Nick Romanenko/Rutgers University
New constraints on the underlying magnetized rocks show that they must be shallow, narrow, and strongly magnetized.
Lava tubes
“This result helps us to better understand the origin of these magnetized rocks and the history of lunar magnetism more generally,” the scientists explain. “In particular, we suggest that these rocks were likely injected into the crust in the form of dikes or subsurface channels of flowing lava and that they cooled slowly, leading to enhancement of their metal content and enabling the rocks to capture a stable record of the Moon’s ancient global magnetic field.”
How could lava tubes and dikes be so strongly magnetic? The answer lies in a reaction that may be unique to the Moon’s environment at the time of those ancient eruptions, over 3 billion years ago, according to a Rutger’s statement.
High iron content
The creation of high iron content lava tubes or dikes would have become strongly magnetic as they cooled.
“No one had thought about this reaction in terms of explaining these unusually strong magnetic features on the Moon,” Tikoo explains. “This was the final piece in the puzzle of understanding the magnetism that underlies these lunar swirls.”
The research article – “Lunar Swirl Morphology Constrains the Geometry, Magnetization, and Origins of Lunar Magnetic Anomalies” – can be found here:
https://agupubs.onlinelibrary.wiley.com/doi/pdf/10.1029/2018JE005604

Japan Aerospace Exploration Agency’s (JAXA) Hayabusa2 ,spacecraft.
Credit: DLR (CC-BY 3.0)
The Japan Aerospace Exploration Agency’s (JAXA) Hayabusa2 asteroid mission is busy at work, in position at asteroid Ryugu.
Imagery shows the temperature differences on asteroid Ryugu’s surface during one rotation, with red indicating regions with a high temperature.
Credit: JAXA, Ashikaga University, Rikkyo University, Chiba Institute of Technology, University of Aizu, Hokkaido University of Education, Hokkaido Kitami Hokuto High School, AIST, National Institute for Environmental Studies, University of Tokyo, German Aerospace Center (DLR), Max Planck Society for the Advancement of Science, Stirling University.
Distinct regions at different temperatures are captured by the Thermal InfraRed Imager (TIR). Features in a thermal image can be seen even if they are in a shaded location in the visible photograph. This lets us confirm that the overall shape of the asteroid is well understood, and also the characteristic topography such as craters and large boulders that show up as a difference in temperature.
Credit: JAXA
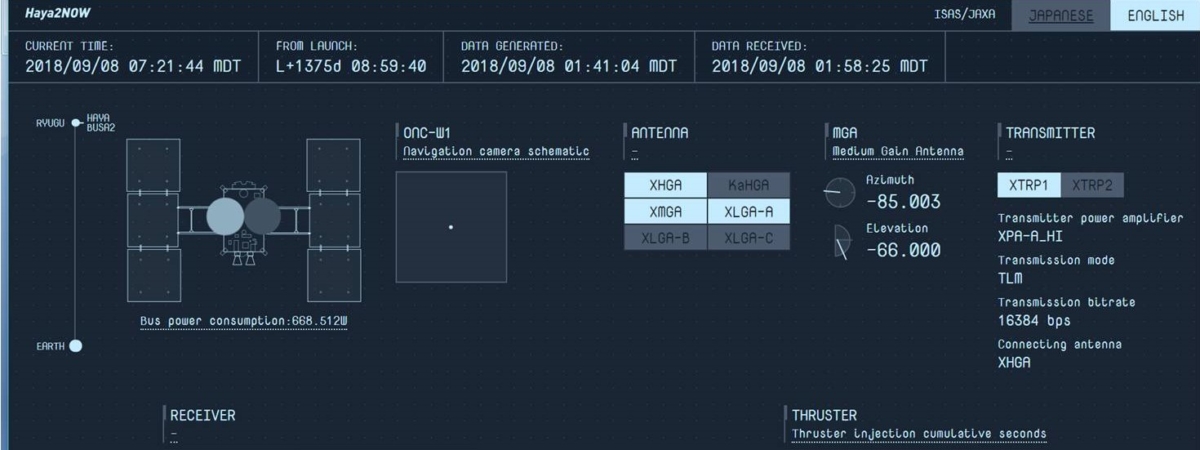
Haya2 now!
Curious about what Japan’s Hayabusa2 asteroid mission is doing right now?
Go to the Haya2 Now website in English!
Just rollover each panel to find out more.
Go to this link:
Credit: NASA/JPL-Caltech/Univ. of Arizona
NASA’s Curiosity rover is now in Sol 2165.
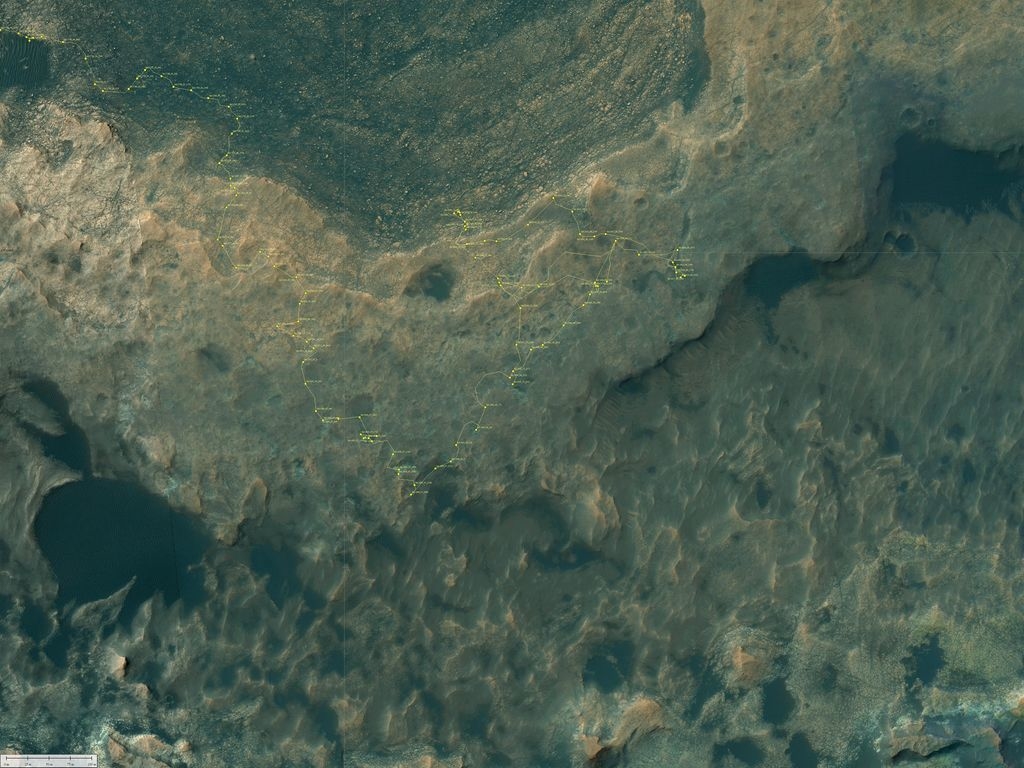
A new road map has been issued showing the robot’s wheeling about Mars since landing in August 2012.
The map shows the route driven by NASA’s Mars rover Curiosity through the 2163 Martian day, or sol, of the rover’s mission on Mars (September 07, 2018).
Numbering of the dots along the line indicate the sol number of each drive. North is up.
Curiosity Front Hazcam Right B photo acquired on Sol 2164, September 7, 2018.
Credit: NASA/JPL-Caltech

Curiosity Navcam Right B image taken on Sol 2164, September 7, 2018.
Credit: NASA/JPL-Caltech
Curiosity Mastcam Right image acquired on Sol 2163, September 6, 2018.
Credit: NASA/JPL-Caltech/MSSS

Curiosity Mastcam Left photo taken on Sol 2163, September 6, 2018.
Credit: NASA/JPL-Caltech/MSSS
From Sol 2161 to Sol 2163, Curiosity had driven a straight line distance of about 50.69 feet (15.45 meters).

Curiosity Mastcam Left photo taken on Sol 2163, September 6, 2018.
Credit: NASA/JPL-Caltech/MSSS
Since touching down in Bradbury Landing in August 2012, Curiosity has driven 12.26 miles (19.74 kilometers).
The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter.
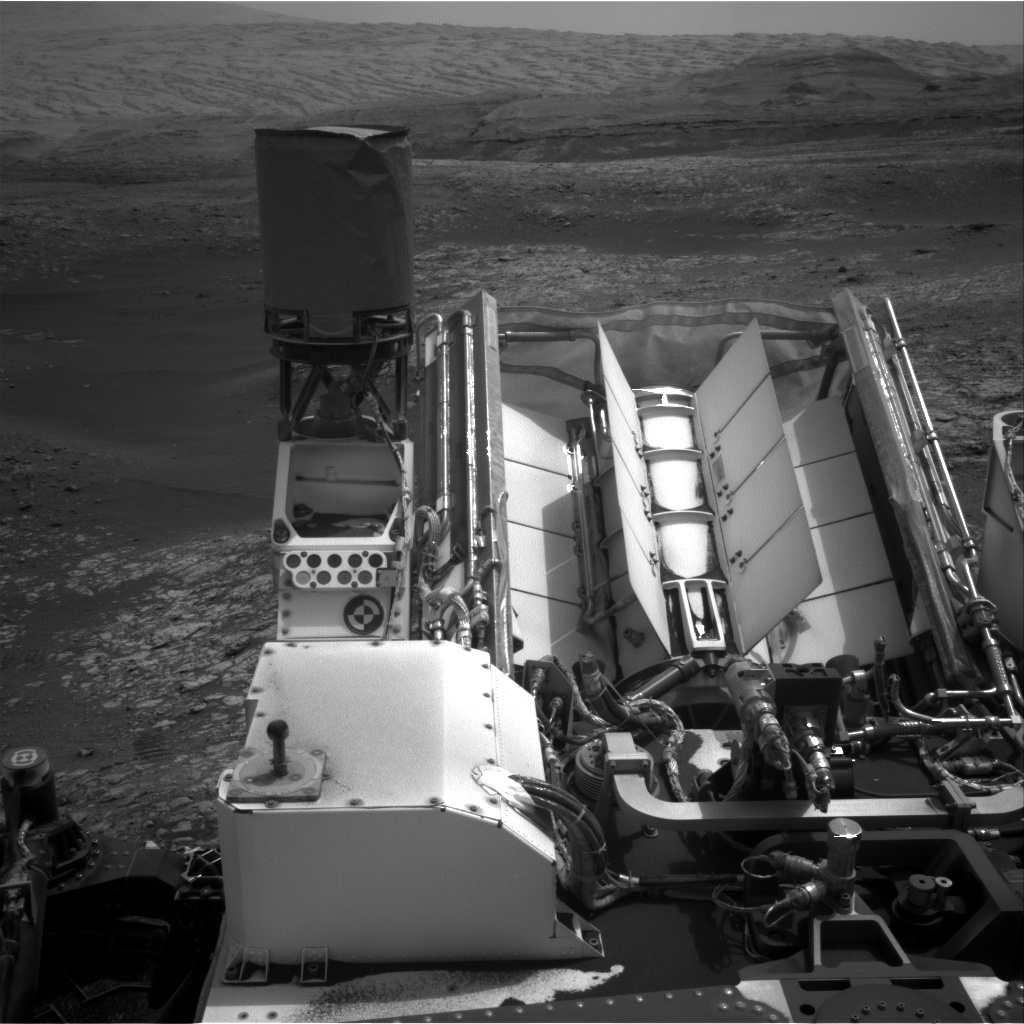
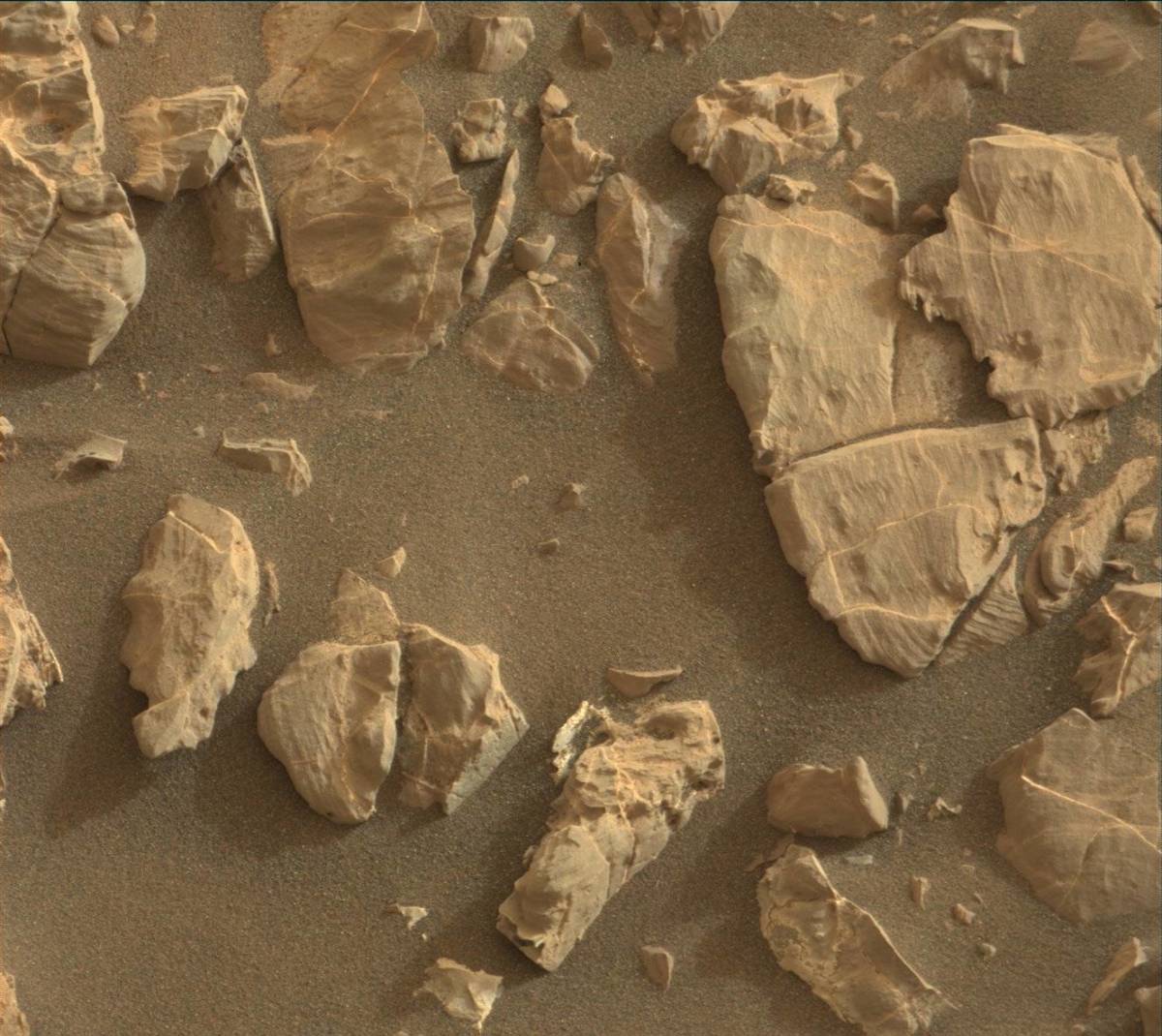
Red planet scenes
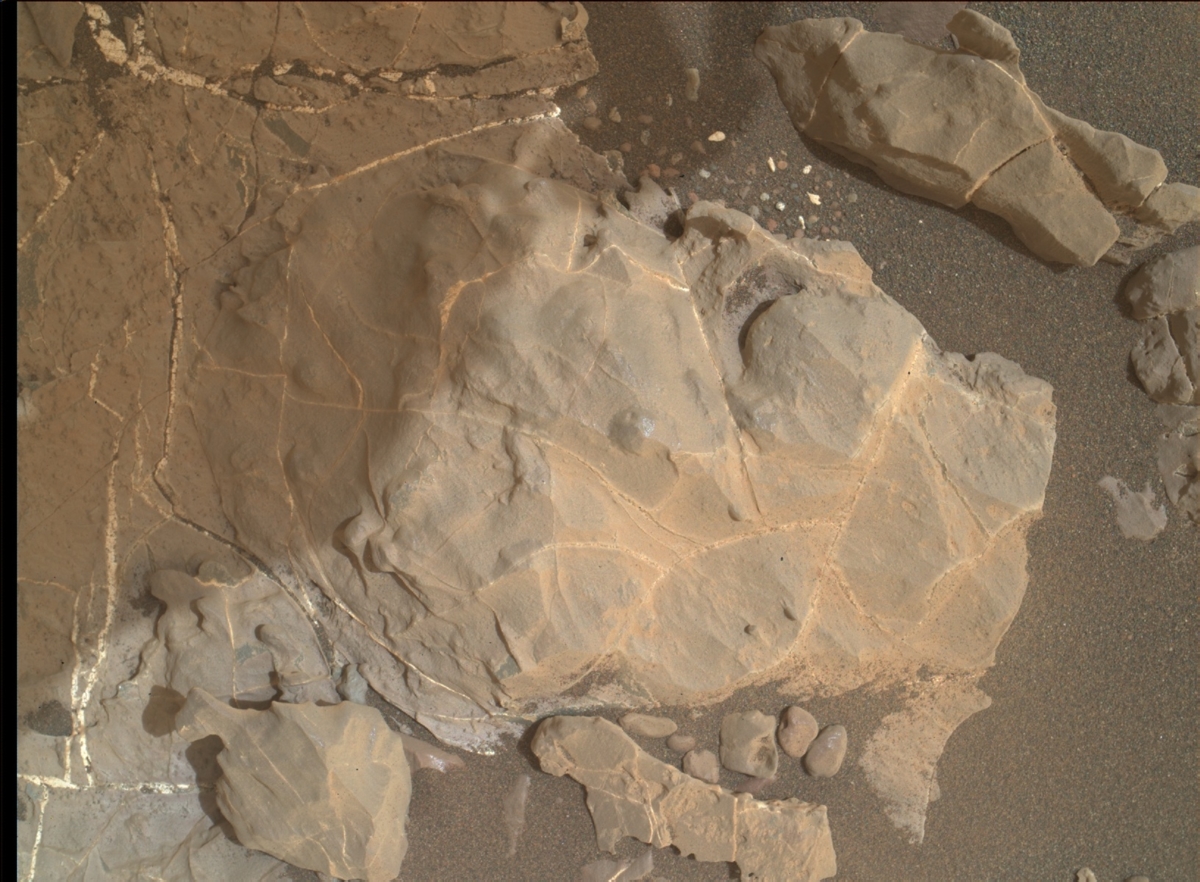
Meanwhile, new color imagery from the rover show its continuing exploration of Vera Rubin Ridge:

