Author Archive
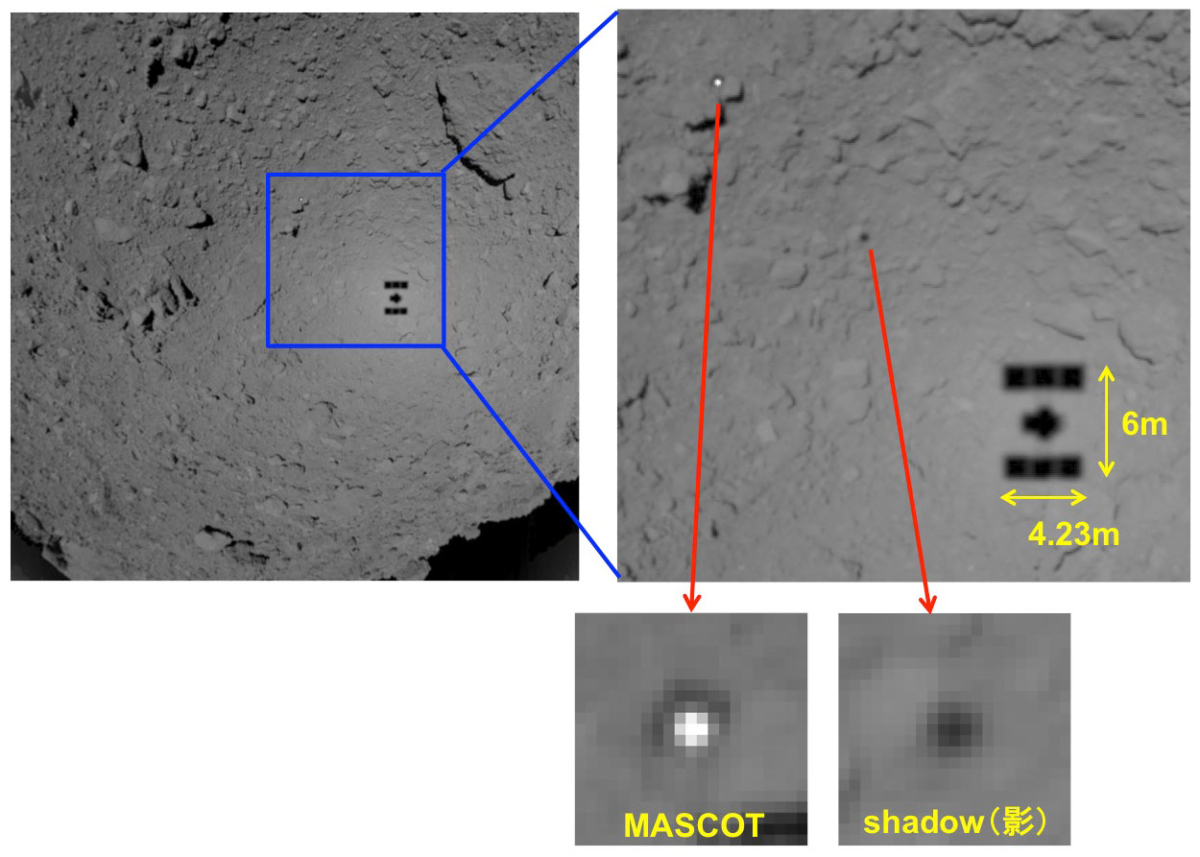
Image of MASCOT photographed with the optical navigation camera (ONC-W1), taken 2 minutes and 20 seconds after the lander separated from the spacecraft. The ONC-W1 is attached to the bottom of the spacecraft, so the view is directly below Hayabusa2. At this point, the spacecraft is rising slowly. MASCOT is the white dot and has not yet landed on the asteroid surface, so the lander casts a shadow that creates a black dot on the surface of Ryugu. Beside it is the shadow of Hayabusa2. If you enlarge the white dot of MASCOT it appears as if there is a white round dot inside a black square. It seems that it is the base (bottom) of MASCOT that is visible. The shining white dot is thought to be the antenna.
Credit: JAXA, University of Tokyo & collaborators
Japan’s Hayabusa2 successfully deployed the Mobile Asteroid Surface Scout (MASCOT), a lander developed in Germany and France.
The small asteroid lander separated from the Hayabusa2 spacecraft on October 3 and safely touched down on the surface of asteroid Ryugu. MASCOT operated for about 17 hours.
Caught on camera
After landing, MASCOT acquired scientific data on the asteroid surface, which was transmitted to the MASCOT team via the spacecraft for analysis.

MASCOT en route to asteroid’s surface photographed by an optical navigation camera onboard the Hayabusa2 spacecraft. The ONC-W2 is a camera attached to the side of the spacecraft and is shooting diagonally downward from Hayabusa2. MASCOT appears in the upper edge of the image.
Credit: JAXA, University of Tokyo & collaborators
From the Hayabusa2 spacecraft, the separated MASCOT was caught by two optical navigation cameras (ONC-W1, ONC-W2).
MASCOT came to rest on the surface approximately 20 minutes after the separation. MASCOT was ejected at an altitude of roughly 167 feet (51 meters) and descended in free fall – slower than an earthly pedestrian – to its space rock destination.
Swing arm
Upon landing, MASCOT relocated itself using a built-in swing arm. All instruments collected detailed data on the composition and nature of the asteroid. The on-board camera provided pictures of the landing, hopping maneuvers and various locations on the asteroid’s surface.
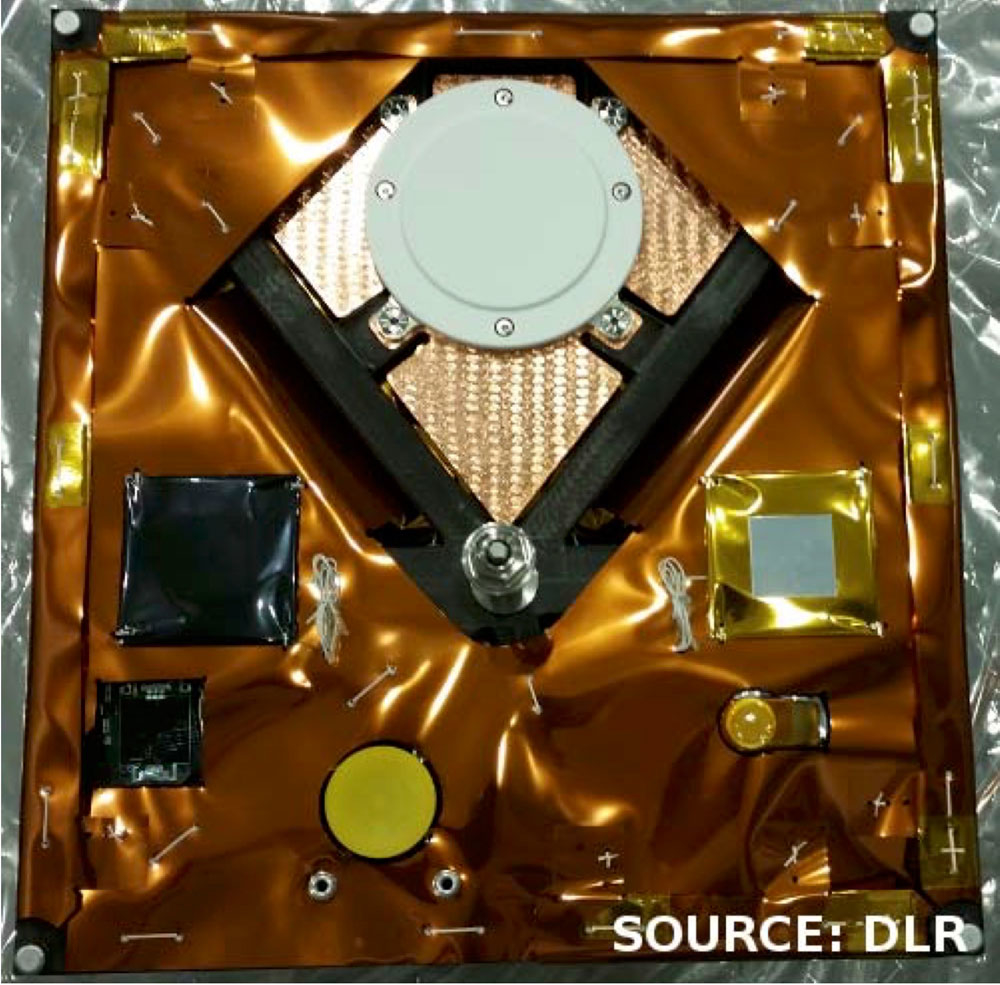
Underside base surface of MASCOT lander. The round white circle is the antenna.
Credit: DLR
MASCOT moved several meters to the next measuring point. Finally, and seeing that the lander still had battery power left, operators made a bigger jump.
Silent inhabitant
All in all, MASCOT explored Ryugu for three asteroid days and two asteroid nights. A day-night cycle on Ryugu lasts about 7 hours and 36 minutes. Three hops in three asteroid days – MASCOT successfully completed the exploration of the surface of asteroid Ryugu.
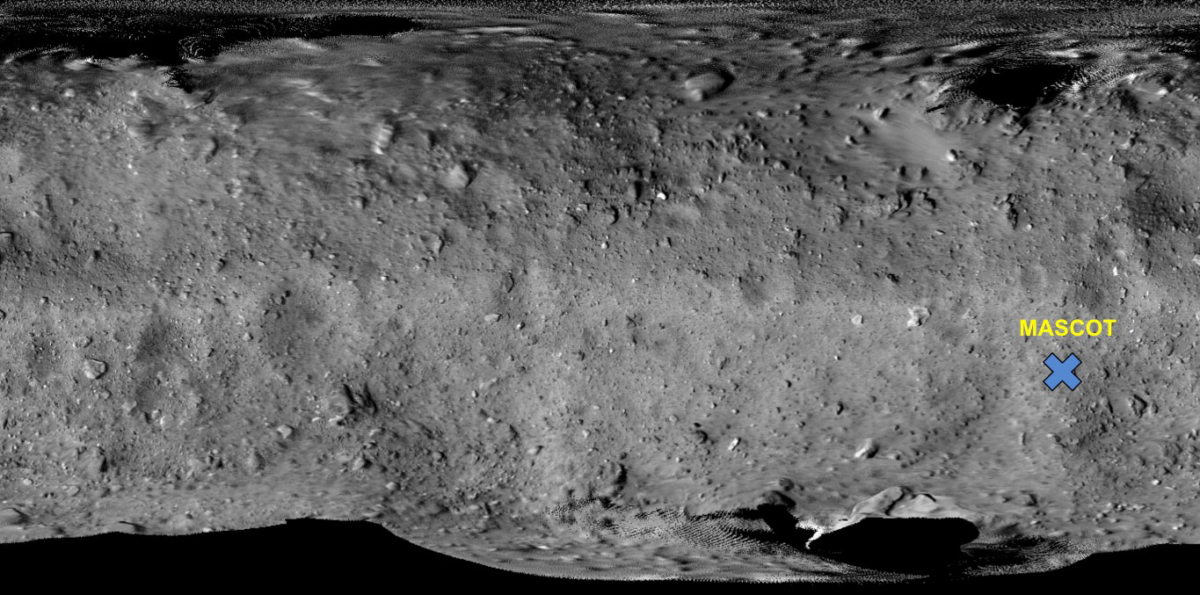
Estimated MASCOT landing point indicated on the Ryugu image taken from the home position of the Hayabusa2 spacecraft.
Credit: JAXA, University of Tokyo & collaborators
MASCOT is now a silent inhabitant of Ryugu. “The evaluation of the valuable data has just begun,” says MASCOT project manager Tra-Mi Ho from the DLR Institute of Space Systems.
Hayabusa2 is a Japan Aerospace Exploration Agency (JAXA) mission to the near-Earth asteroid Ryugu.
The German-French lander MASCOT was developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and built in close cooperation with the French space agency CNES (Centre National d’Etudes Spatiales).
Credit: Obayashi Corporation of Tokyo, Japan
A novel trial-run to help design a space elevator is now at the International Space Station, tucked away within Japan’s HTV-7 resupply ship that berthed to the ISS on September 27.
The Japanese STARS-Me (Space Tethered Autonomous Robotic Satellite-Mini Elevator) was produced by researchers at Shizuoka University in Japan. Obayashi, a Japanese construction firm, is collaborating on the project.
While STARS-Me is an important experiment, the emplacing of an Earth-to-space elevator remains a “miles to go” task. Two critical problems stand in the way of a space elevator, but there are approaches to each problem
Meanwhile, there’s a plan is to create a permanent tether system on the Moon that is reusable, replaceable and expandable.
For more information on where things stand on elevating the status of the space elevator, go to my new Space.com story at:
Going Up? Waiting for the Space Elevator
By Leonard David, Space.com’s Space Insider Columnist
October 5, 2018 05:03pm ET
https://www.space.com/42041-space-elevator-test-stars-me.html
The Smithsonian History of Space Exploration – From the Ancient World to the Extraterrestrial Future by Roger Launius, Smithsonian Books, Washington, D.C., October 2018; $40.00, 400 pages.
Space historian Roger D. Launius has written a marvelous volume, an inclusive illustrated guide to the history of U.S. and international space exploration, both crewed missions and robotic encounters.
The book is divided into 10 sections: Laying the Foundations for Space Exploration; World War II Paves the Way for Space Exploration; Making Space Exploration Real; The Space Age Dawns; The Race to the Moon; New Nations, New Missions; Space Planes and Orbital Stations; The Lure of the Red Planet; Beyond Mars; and Transterrestrial Expectations.
You can tell by the titles of those sections how rich and valuable this book is, both in subject matter and quality of research and writing. As Launius notes in the introduction: “The story is far from complete; indeed, it has only just begun.”
The book spotlights how much progress has made given the foundation of work by the ancients of Greece, Rome, and China, along with the great astronomical revelations of Renaissance thinkers such as Copernicus, Galileo, and Kepler. Mix in the onslaught of technological and mechanical breakthroughs and you move from gazing upwards and wondering…to men, women and machines traveling from Earth to encounter the unknown, first hand or by robotic sensor.
Stunning photographs and artwork are used throughout the book from the past, present-day, and artistic glimpses into the future that are yet to unfold. In fact, I enjoyed very much the build-up to the book’s closing section on the future. The reader will find solid accounts of space activities now in play, from next generation space access, the future of orbital space planes, to lunar research stations and pursuing interstellar space exploration.
While setting the stage for 21st century and beyond space exploration excitement, Launius raises in the last pages five challenges that need addressing before you’ll be sending postcards from the edge of space. I won’t tell you what they are, but they add vibrancy to this must-read book.
For more information on this book, go to:
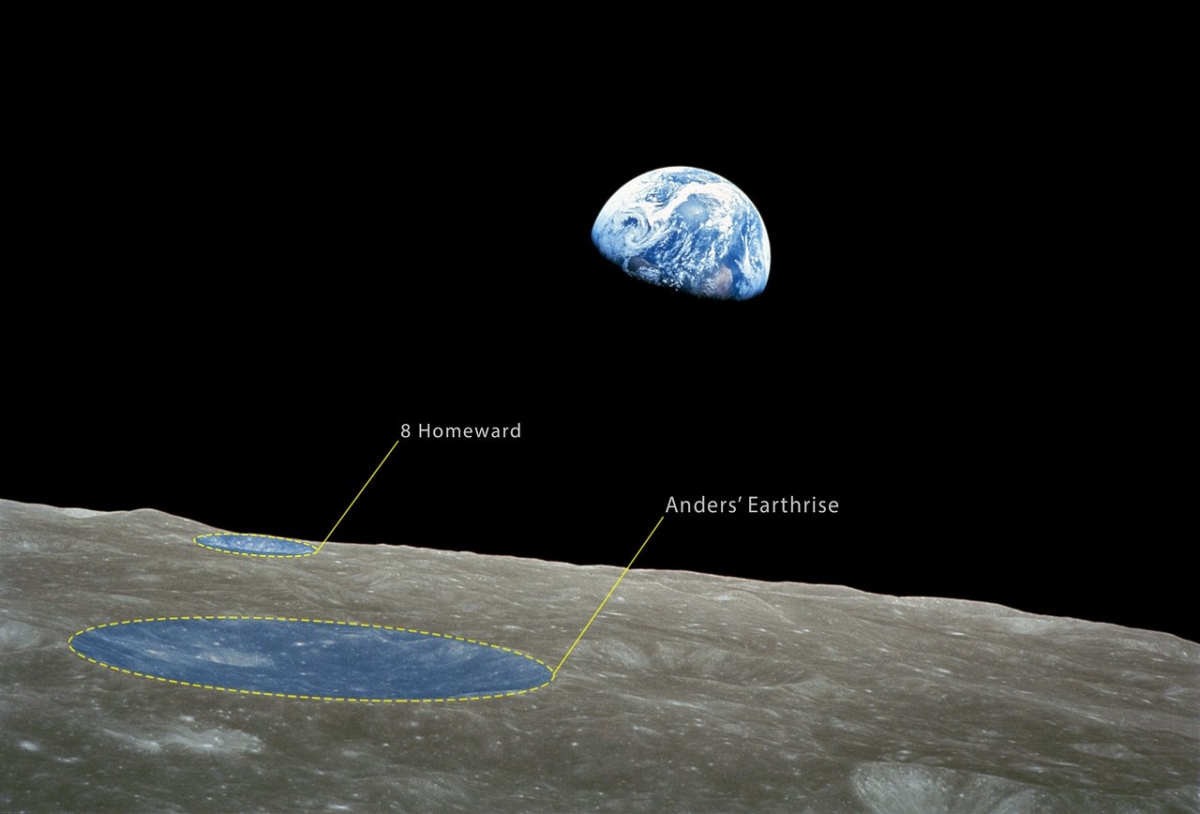
The newly named craters are visible in the foreground of the iconic Earthrise color photograph taken by astronaut William Anders. It depicts the moment that the shiny blue Earth came back into view as the spacecraft emerged out of the dark from behind the grey and barren Moon. This is arguably the most famous picture taken by Apollo 8. It became iconic and has been credited with starting the environmental movement.
Credit: NASA/IAU
That crater-pocked Moon has two new geological features: Anders’ Earthrise and 8 Homeward.
The Working Group for Planetary System Nomenclature of the International Astronomical Union has today officially approved the naming of two craters on the Moon to commemorate the 50th anniversary of the Apollo 8 mission.
Since the Moon is tidally locked to the Earth — it always has the same side facing the Earth — the Earth will never appear to rise above the surface to someone standing on the lunar far side.
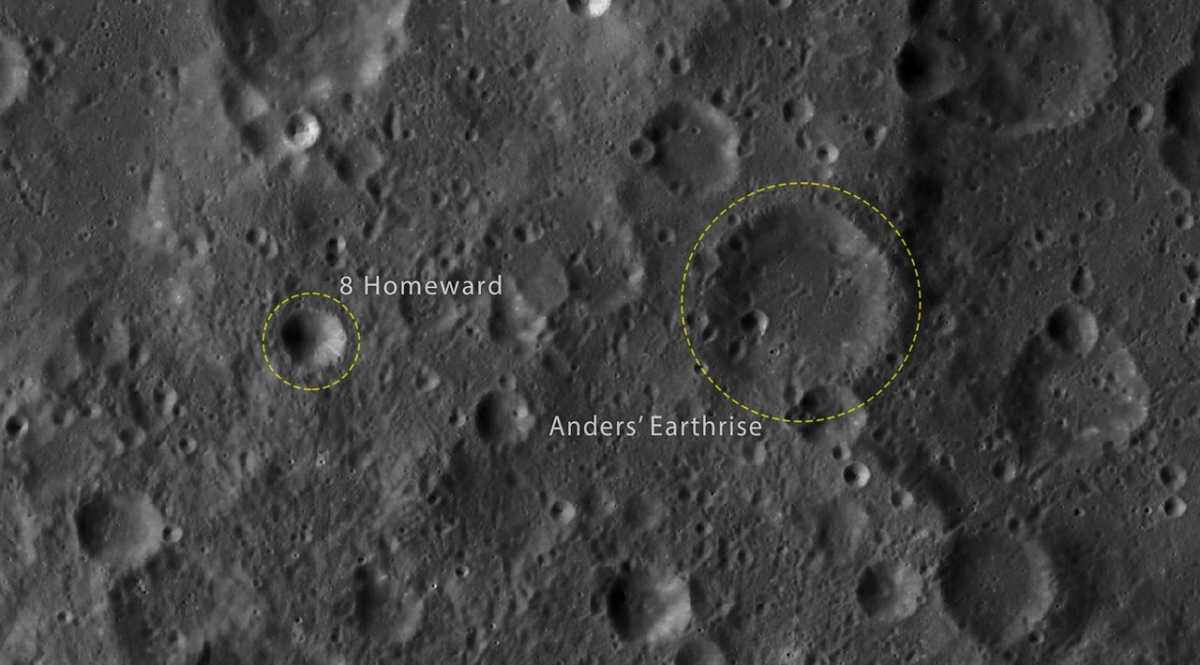
The Working Group for Planetary System Nomenclature of the International Astronomical Union has officially approved the naming of two craters on the Moon to commemorate the 50th anniversary of the Apollo 8 mission. The names are Anders’ Earthrise and 8 Homeward. These two craters are marked here.
Credit: IAU
Orbiting around the Moon, however, gave the Apollo 8 astronauts, Frank Borman, James Lovell, and William Anders a stunning view, before they safely returned home to Earth.
The Apollo 8 mission took place from 21 to 27 December 1968.
After completing 10 orbits around the Moon on Christmas Eve, broadcasting images back to Earth and giving live television transmissions, the crew returned to Earth and landed in the Pacific Ocean.
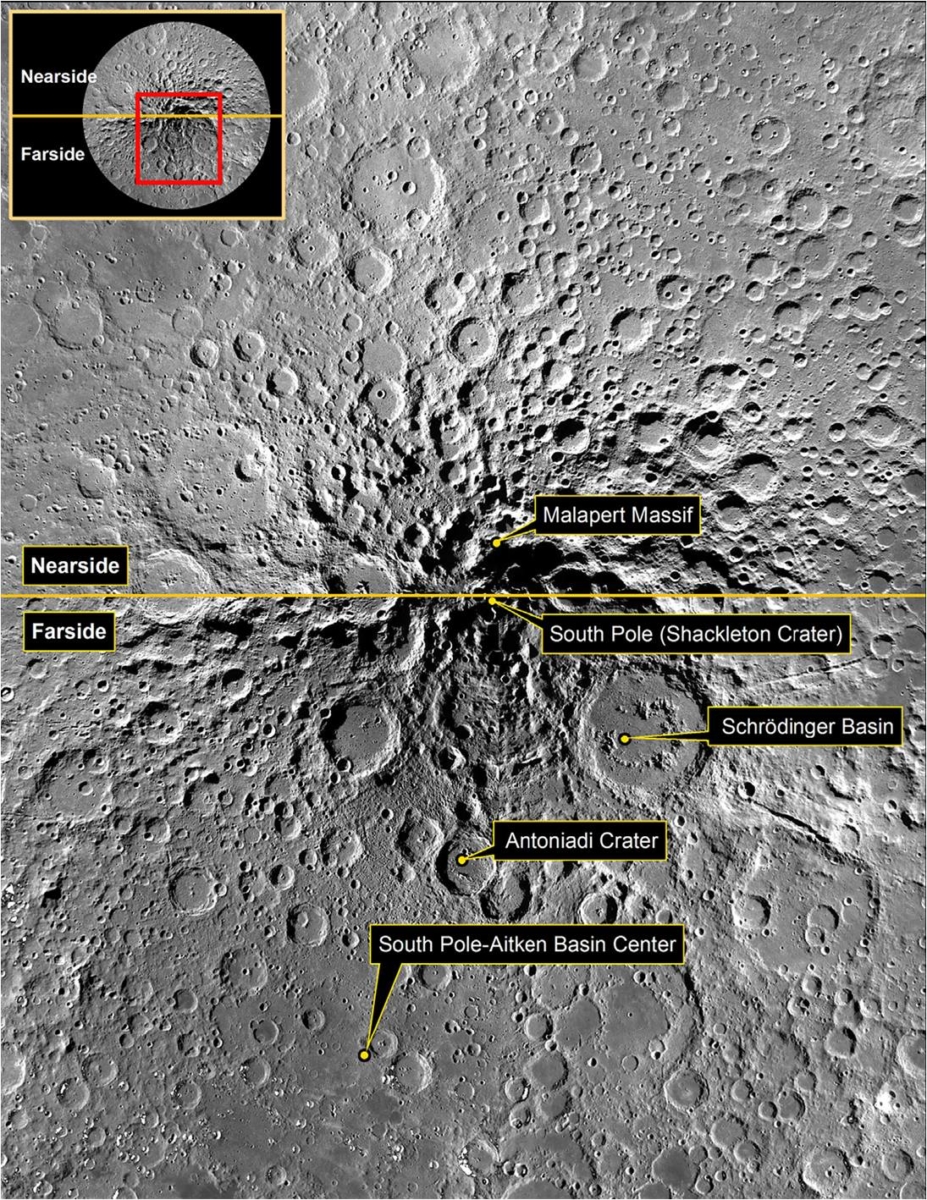
Overview of all landing sites considered in new study.
Credit: E.J. Allender et al./Advances in Space Research
An international team of lunar researchers has blueprinted an exploration scenario for humans and robots to investigate five sites on the Moon. The detailed plan for human lunar surface missions is shaped by science, strategies for surface campaigns, and a Mars-forward perspective.
The proposed missions focus on the Moon’s south polar region and target five sites of diverse scientific interest: Malapert massif, the South Pole/Shackleton crater, Schrödinger Basin, Antoniadi crater, and South Pole-Aitken (SPA) basin.
This study is tied to release of the 2018 Global Exploration Roadmap (GER) developed by the International Space Exploration Coordination Group (ISECG). The focus of the study is how best to explore the south polar region of the Moon, a region that has not been visited by any human missions, yet exhibits a multitude of scientifically important locations – the investigation of which will address long standing questions in lunar research.
Selected sites would be visited in sequential years by crew, beginning in 2028. Two Lunar Electric Rovers are proposed to be tele-robotically operated between sites to rendezvous with crew at the time of the next landing.
The study – “Traverses for the ISECG-GER design reference mission for humans on the lunar surface” – is available online in the journal, Advances in Space Research.

Example of a landing site traverse: This image depicts Malapert massif to South Pole-Aitken basin center.
Credit: E.J. Allender et al./Advances in Space Research
Lunar goals
By visiting the proposed sites, the paper suggests that a suite of lunar investigative goals can be approached:
- The bombardment history of the inner solar system is uniquely revealed on the Moon.
- The structure and composition of the lunar interior provide fundamental information on the evolution of a differentiated planetary body.
- Key planetary processes are manifested in the diversity of lunar crustal rocks.
- Lunar volatiles increase our understanding of the composition state and distribution of volatiles in the lunar polar regions.
- Lunar volcanism provides a window into the thermal and compositional evolution of the Moon.
- The Moon is an accessible laboratory for studying the impact process on planetary scales.
- The Moon is a natural laboratory for regolith processes and weathering on anhydrous airless bodies.
- Processes involved with the atmosphere and dust environment of the Moon are accessible for scientific study while the environment remains in a pristine state.
Site selections
The South Pole-Aitken (SPA) basin is the largest and oldest recognized impact structure in the Solar System.
Malapert massif is a mountainous surface feature located on the lunar nearside. It also contains various small-scale permanently shadowed regions (PSR) which are accessible for exploration and will provide information about extreme conditions in lunar polar environment and volatile composition.
PSRs are ‘cold trap’ areas whose temperatures are cold enough to host water, carbon dioxide, and other volatiles.
Shackleton crater is at the South Pole and is a PSR that may contain icy deposits of volatiles suitable for in situ resource utilization (ISRU).
Schrödinger Basin is inside the SPA basin and formed at the end of the basin-forming epoch on the Moon. It is the best preserved basin of its size in the Earth-Moon system. Moreover, this basin contains pyroclastic material with a localized source vent making it a high-priority ISRU location.
The landing site within Antoniadi crater is noteworthy because it contains the lowest point on the Moon. Antoniadi crater contains both a central peak and a central peak ring structure and is, thus, sometimes classified as a “proto-basin.”
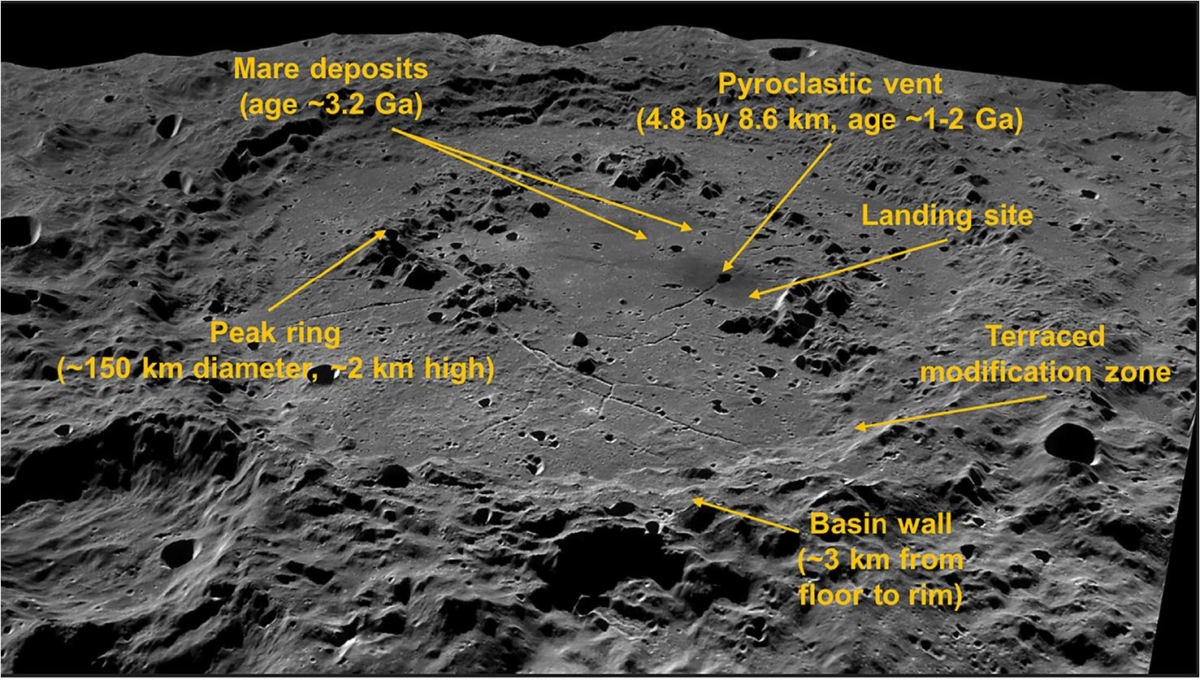
Oblique view of Schrödinger Basin exploration zone.
Credit: E.J. Allender et al./Advances in Space Research
Launches one year apart
The findings of the study, obtained through integration of multiple remotely-sensed lunar datasets, robotic asset capabilities, and communications feasibility, show that a human-assisted robotic mission to the lunar south polar region, including farside locations, can address key lunar science concepts, and would be a valuable resource for the early history and evolution of the Solar System.
For the study, five booster launches, one year apart, is assumed with each launch delivering a team of four crew to eDSH for subsequent surface exploration. The eDSH is a prototype habitat that builds on the expertise, capabilities, and lessons learned from the International Space Station. The plan is enabled by use of the Lunar Orbital Platform-Gateway (LOP-G).
Two Small Pressurized Rovers would be used to explore the lunar surface. Their design is assumed to be a flight-evolved version of the Lunar Electric Rover (LER) that has been field tested here on Earth in 3-day, 14-day, and 28-daylong mission simulations.
This paper led by Elyse J. Allender of the School of Earth and Environmental Sciences, University of St Andrews, St Andrews, UK – “Traverses for the ISECG-GER design reference mission for humans on the lunar surface” – can be found here:
https://www.sciencedirect.com/science/article/pii/S0273117718306604?via%3Dihub
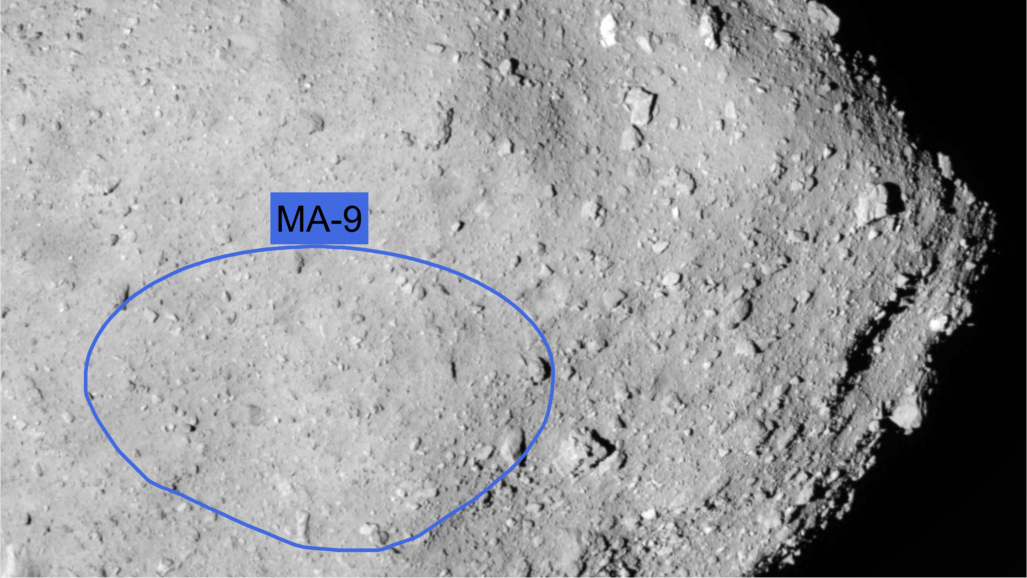
Drop zone for MASCOT
Credit: JAXA, University of Tokyo & Collaborators
The Japan Aerospace Exploration Agency’s Hayabusa2 space probe is slated to deploy on October 3 the asteroid lander, the Mobile Asteroid Surface Scout (MASCOT).
Upon landing on asteroid Ryugu, MASCOT will only be reachable during a few time windows. Sending a command to the lander and receiving a response back on Earth will take more than 30 minutes.
MASCOT will thus be left largely to its own devices during the 16-hour-long measurement operation planned on the space rock’s surface.
Deployment time from Hayabusa2 is early in the morning, at 03:58:15 CEST.

MASCOT control center
Credit: DLR (CC-BY 3.0)
Into the unknown
From MASCOT’s first moment of contact with the surface, this will be a journey into the unknown. The lander could come to rest almost anywhere within a radius of roughly 700 feet (200 meters) from the point of touchdown, after bouncing a few times.
It is planned that MASCOT will land in the southern hemisphere of the Ryugu asteroid. This location has a favorable day and night cycle and a temperature range neither too hot nor too cold for the lander. The rocks around the landing site are not too big, but there are numerous boulders measuring up to 100 feet (30 meters) in height, which present an additional challenge.
Lander control is at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) in Cologne. They will be expecting confirmation of the landing.
Landing concerns
At that time, MASCOT will have come to rest and will start taking comprehensive scientific measurements. The lander will remain there for about 16 hours before craft’s battery runs out.

Artwork depicts MASCOT on asteroid surface.
Credit: DLR (CC-BY 3.0)
“We do not know in which direction and for how long MASCOT will bounce around after the initial touchdown, and we are of course hoping that it will not end up on terrain that is too soft or get stuck in a crevice, where it could not straighten itself,” explains DLR’s MASCOT Operations Manager Christian Krause.
“However, we are optimistic because we ran through numerous scenarios on the ground and have sent the corresponding command sequences to MASCOT,” said Krause in a press statement.
Want to follow?
The DLR Institute of Space Systems in Bremen was responsible for developing and testing the lander together with the French space agency, CNES.
Here’s an informative and good luck MASCOT video:
https://www.youtube.com/watch?time_continue=68&v=q4oenCRPFZA
Want to follow? Go to:
The Twitter account @MASCOT2018 will be posting the very latest information before and during the landing using the hashtag #asteroidlanding
Go to live feed on deployment day at:

Last image from Opportunity. Panoramic Camera photo taken on Sol 5111, June 10, 2018.
Credit: NASA/JPL/CALTECH
Due to a massive dust storm on the Red Planet, NASA’s Opportunity Mars rover has remained silent for well over three months.
No signal from the robot has been heard since Sol 5111 on June 10, 2018.
It is expected that solar powered Opportunity experienced a low-power fault. Perhaps, a mission clock fault and an up-loss timer fault, as well. The dust storm on Mars continues to subside. The science team has been listening for the rover over a broad range of times using the Deep Space Network (DSN) Radio Science Receiver. In addition, commanding “sweep and beeps” throughout the daily DSN pass is another avenue to address a possible complexity with certain conditions within the mission clock fault.
Memory issue
Meanwhile, now over two weeks ago, NASA’s nuclear powered Curiosity Mars rover also experienced a problem. Its last images were transmitted back on September 15, 2018.

One of last images from Curiosity Mars rover, taken by Front Hazcam Right B on September 15, 2018.
Credit: NASA/JPL-Caltech
In this case a memory storage issue preventing the robot from sending science and engineering data, although the Jet Propulsion Laboratory has stated that the rover remains in its normal mode and is otherwise healthy and responsive.
Engineers continue to better analyze the issue. Because the amount of data coming down to Earth from Curiosity is limited, it may take some time for the engineering team to diagnose the problem.

Mobile Asteroid Surface Scout is set for deployment from Japan’s Hayabusa2.
Credit: DLR (CC-BY 3.0)
The Japan Aerospace Exploration Agency’s (JAXA) Hayabusa2 asteroid probe is set to deploy on October 3 the MASCOT (Mobile Asteroid Surface Scout). MASCOT will join two previously deployed devices; the MINERVA-II1 consists of two rovers, 1A and 1B.
MASCOT is a mobile box-shaped landing device measuring 30 x 30 x 20 centimeters and weighing approximately 22 pounds (10 kilograms). The lander was built by the German Aerospace Center (Deutsches Zentrum für Luft-und Raumfahrt; DLR) in collaboration with the French space agency, CNES.
The lander accommodates four scientific instruments designed to study the surface of the asteroid Ryugu in detail.
Swing-arm

Christian Grimm of DLR’s Institute of Space Systems in the Department of Exploration Systems works with colleagues on MASCOT.
Credit: DLR
MASCOT includes a mechanism that enables movement on the asteroid surface – a swing-arm, made out of tungsten, which is accelerated and decelerated by a motor. That action causes the whole system to swing, so that MASCOT can move by ‘jumping’ and thus maneuver itself into the position required to conduct experiments.
MASCOT’s battery is sufficient for 16 hours of operating time. However, the actual operating time depends on the temperature and actual power consumption on site. During this time, Ryugu will go through about two full asteroid day-and-night cycles.

Pre-launch photo of MASCOT being placed on Japan’s Hayabusa2 asteroid probe.
Credit: DLR
Free-fall
MASCOT will be let loose by Hayabusa2, pushed out of its holding device by means of a spring mechanism behind a push-off plate.
The lander will free-fall from a height of roughly 200 feet (60 meters), at the falling speed of a sheet of paper, touching down on Ryugu after approximately 15 minutes. The hardware is expected to bounce at least once or several times over the surface. The final landing site and orientation are therefore uncertain.
In order to carry out the experiments, an ‘upright’ position is required: In order for MASCOT to be able to work, the on-board computer is informed of the orientation data by means of position sensors. The swing arm is then activated, making MASCOT change position if necessary, ensuring that it is in the correct position.

As Japan’s Hayabusa2 descended towards Ryugu to deploy the MINERVA-II1 rovers, a camera onboard the asteroid explorer snapped the highest resolution image yet of the space rock’s surface!
Credit: JAXA
Due to long signal propagation times to Earth, intervention from the ground station is not possible, meaning that all actions are autonomously carried out by MASCOT.
Go to this informative DLR video for more information on MASCOT:

Credit: Euroconsult
Government funding in space exploration is expected to surpass $20 billion by 2027. In future years, there will be a boost in public and private initiatives in space exploration with a converging global interest in Moon exploration.
Those findings and others can be drawn from a new report by Euroconsult a global consulting firm specialized in high technology industries, with expertise in world space activities.

Israel’s lunar lander.
Credit: SpaceIL
Global investment
The report — Prospects for Space Exploration – explains that global government investment in space exploration totaled $14.6 billion in 2017, a 6% increase compared to 2016.
Fifteen leading space programs worldwide are estimated to contribute to this global investment with the U.S. accounting for 74% of the total. Global expenditures have grown in the past five years driven by programs in leading countries and new countries investing in space exploration.
In a still constrained budgetary environment, global space budgets for space exploration are expected to grow to over $20 billion by 2027.
Realistic and pragmatic investment
Natalia Larrea Brito, Senior Consultant at Euroconsult and editor of the report observes: “Future funding for space exploration is expected to grow to support the ambitious plans of the next decade.”
Brito however adds, “nonetheless, national investments will remain constrained by their public finance environments that should dictate realistic and pragmatic investment strategies. Space exploration is attracting not only the interest of an increasing number of governments but also the private sector; start-ups to large companies seek to exploit the commercial potential of exploration activities.”

Blue Origin’s New Shepard booster takes flight.
Credit: Blue Origin
“Space agencies are increasingly seeking to leverage partnerships with the private sector to achieve their goals more cost-effectively while fostering sustainable space exploration,” Brito concludes.
Moon exploration
Key findings of the report include:
— At $7.7 billion in 2017, transportation is the largest expenditure area; it is forecasted to reach nearly $9 billion in 2027 supported by significant investments from multiple countries and particularly in the U.S. and China to support the development of next generation crew and/or cargo vehicles for low Earth orbit (LEO) and beyond-LEO activities.
- Orbital infrastructure is the second-largest application with $3.5 billion in 2017, an investment which has been stable over the past five years. Funding should continue to grow, driven by investments in the ISS program and increasing funding for the development of the Lunar Orbital Platform-Gateway by ISS partners as well as China’s investment in it space station.

Credit: NASA/ESA
- Moon exploration, which has received modest investment in the past five years, should experience sustained growth, reaching $2.8 billion by 2027 to support ambitious government missions and commercial partnership programs as Moon exploration becomes a central item in the exploration strategy of most agencies moving forward.
- Mars exploration budgets grew to $1.5 billion in 2017; investment is expected to peak in 2018 as four missions are set for launch in 2020. After a cyclical downturn, new investment cycles to support planned missions might increase funding again to reach $1.3 billion in 2027.
- Other deep space exploration programs reached $1.4 billion in 2017; global funding should reach $1.8 billion by 2021 to support the development of multiple planned missions in the middle and end of the decade.
- Over the past ten years, 19 planetary exploration missions were launched by six countries/agencies (the U.S., ESA, Russia, Japan, China and India). Over the next decade nearly 80 missions are expected to be launched, of which 63% will correspond to government missions.
- The next decade will also see the rise of commercial exploration initiatives, with close to 30 commercial missions forecasted by 2027, primarily driven by lunar initiatives.
- In terms of applications, Moon exploration is expected to account for the majority of missions (64% of the total) to be launched by 2027, as lunar exploration becomes the focus in the strategy of private and public stakeholders. A total of 18 missions are anticipated to be launched for other deep space exploration, while the remaining missions will be dedicated to Mars exploration.

New planetary prowler – the NASA Mars 2020 rover – scouring the Red Planet for select samples for eventual return to Earth.
Credit: NASA/JPL


Economic/strategic assessment
The report is an economic and strategic assessment of the space exploration sector, including an analysis and benchmark of government and commercial space exploration programs worldwide.
The report identifies existing and upcoming new entrants in space exploration, global trends related to space exploration, and analyzes collaborative undertakings for exploration, including both international space agency partnerships as well as public-private partnerships.
For more information on the report — Prospects for Space Exploration – go to:
http://www.euroconsult-ec.com/shop/index.php?id_product=108&controller=product
Credit: Subcommittee on Space, Committee on Science, Space, and Technology/Screengrab
How does 60 years of NASA leadership in human space exploration, past, present, and future stack up?
This House hearing featured William Gerstenmaier, Associate Administrator for Human Exploration and Operations. He detailed NASA’s current Moon, Mars, Lunar Gateway, extending the International Space Station, commercial space alliances and other issues.

Subcommittee on Space, Committee on Science, Space, and Technology/Screengrab
This Subcommittee on Space, Committee on Science, Space, and Technology hearing was held Wednesday, September 26, 2018 and can be viewed here:
In addition to Gerstenmaier, also testifying:
Mark Geyer, Director, Johnson Space Center, NASA
Jody Singer, Director, Marshall Space Flight Center, NASA
Robert Cabana, Director, John F. Kennedy Space Center, NASA
Gerstenmaier’s written testimony is available at:

Credit: NASA/Aubrey Gemignani
Global space race
Another hearing on September 26 was held by the Subcommittee on Space, Science, and Competitiveness was titled Global Space Race: Ensuring the United States Remains the Leader in Space.
NASA’s James Bridenstine, Administrator, was the sole witness at this third in a series of hearings leading up to a potential NASA authorization. This hearing examined the challenges NASA faces in undertaking human and robotic exploratory missions, its research in aeronautics and space technology, and how the agency’s current and planned initiatives will affect its future mission goals.
The hearing can be viewed here at:
https://www.commerce.senate.gov/public/index.cfm/hearings?ID=F3E26BDE-FB5F-453E-A4E0-BA0E2DA4CA39

