Author Archive

Distribution of the studied basins on Mars based on Mars Orbiter Laser Altimeter topography (blue indicates high elevations).
Credit: Salese et al.
New research points to geological evidence supporting a planet‐wide groundwater upwelling on Mars.
This newly recognized evidence of water‐formed features significantly increases the chance that biosignatures could be buried in the sediment. These deep basins (groundwater‐fed lakes) will be of interest to future exploration missions as they might provide evidence of geological conditions suitable for life.
These views are contained in the paper — Geological Evidence of Planet‐Wide Groundwater System on Mars – published in the American Geophysical Union’s Journal of Geophysical Research: Planets.

Conceptual model, of Martian basins evolution and their relations with the groundwater storage, from the oldest (bottom) to the most recent stage (top).
Credit: Salese et al.
Deep closed basins
Most previous studies on Mars relevant groundwater have proposed models, but few have looked at the geological evidence of groundwater upwelling in deep closed basins in the northern hemisphere equatorial region, the paper explains.
Observations in the northern hemisphere show evidence of a planet‐wide groundwater system on Mars.
The elevations of these water‐related morphologies in all studied basins lie within the same narrow range of depths below Mars datum and notably coincide with the elevation of some ocean shorelines proposed by previous authors. The term called “Mars datum surface” refers to the average elevation on Mars.

Morphologies inside Crater #9. A large stepped delta can be observed on the northeast side of the crater. Possible shoreline indicated at −4,200 m (maroon arrows).
Credit: Salese et al.
Interconnected?
The research, led by Francesco Salese of the Faculty of Geosciences, Utrecht University, Utrecht, The Netherlands suggests that subsurface aquifers in all basins might be interconnected.
“Nevertheless, the evidence obtained from this work is not enough to affirm with certainty the interbasins connection,” Salese and colleagues explain. “Our observations show that the extent of this aquifer is very significant and it leads us to support the thesis that it could have been planet wide.”
To review the paper — Geological Evidence of Planet‐Wide Groundwater System on Mars – go to:
https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2018JE005802

Courtesy: Gateway Foundation
The Gateway Foundation has issued an informative and eye-catching look at a future vision.

Courtesy: Gateway Foundation

Courtesy: Gateway Foundation
Published on Feb 15, 2019, the video showcases the Von Braun rotating space station – the first commercial space construction project in history.
It will be serviced by the SpaceX Starship and be designed to accommodate national space agency laboratories, billionaires who want to own property in space, and space tourists.
Go to video at:
For more information on the Gateway Foundation, go to:

“Horning in” on an asteroid. Sampler horn will be used to gather up space rock material.
Credit: JAXA/Screengrab/Inside Outer Space
Japan’s Hayabusa2 team reports that the surface of asteroid Ryugu was not what they expected.
Because of this on-the-spot finding, the spacecraft sampler team carried out an experiment to see if Hayabusa2 could still gather material from the asteroid’s surface when they attempt the probe’s touchdown this Friday.

MASCOT en route to asteroid’s surface photographed by an optical navigation camera onboard the Hayabusa2 spacecraft. The ONC-W2 is a camera attached to the side of the spacecraft and is shooting diagonally downward from Hayabusa2. MASCOT appears in the upper edge of the image.
Credit: JAXA, University of Tokyo & collaborators
Final test
Late last year, the sampler team conducted a final test before touchdown, firing an identical bullet to that onboard Hayabusa2 into a simulated soil of the surface of space rock Ryugu. The test evaluated how much sample would be ejected after the bullet’s impact.
Hayabusa2 operators expected the topography of the asteroid would be a powdery fine regolith. That was not found on the surface of Ryugu.
Rather, centimeter-sized or larger gravel was observed by the MASCOT and MINERVA-II1 rovers that landed on the asteroid surface.

Credit: JAXA
Artificial gravel
“This is quite different from the prediction before launch, so it took time to investigate the safety of the spacecraft during touchdown. Additionally, it was necessary to review whether sample material would still be released from the asteroid surface as originally assumed,” as reported by a new Japan Aerospace Exploration Agency (JAXA) Hayabusa2 twitter posting.

The projector (barrel) and the projectile (bullet) below used in the experiment. As this is a flight spare, the shape and the material are all the same as those of onboard Hayabusa2. Credit: JAXA)

Credit: JAXA
Artificial gravel was prepared in collaboration with Professor Hideaki Miyamoto at the University of Tokyo, Graduate School of Engineering. By simulating properties such as strength, density and composition, Hayabusa2 researchers replicated a carbonaceous chondrite meteorite, which is regarded as fragments of C-type asteroids similar to Ryugu.
The target was formed by stacking up the artificial gravel with a similar size distribution as that observed on the surface of Ryugu based on images from the landers.
Collided like billiards
Experiment results show that the fragments of gravel that were crushed by the bullet were released into the surrounding gravel where they collided like billiards to break up the material.

Target simulating the surface of Ryugu.
Credit: JAXA, University of Tokyo
The resulting sample amount exceeded the initial assumption that would be released from the surface.
While the diameter of the collision site (crater) made by the impact of the projectile is smaller in comparison to that in a fine regolith layer, it was a sufficient size in comparison with the inner diameter of the open tip of the sampler horn, the team reports.
High-speed camera
Although the experiment was carried out in the Earth’s gravity, the images from a high-speed camera revealed that fragments of crushed powdery gravel can pass through the collection horn.
At the target asteroid, under microgravity, even more samples are expected to be introduced into the sampler horn, “meaning that if we land on a terrain similar to the simulated target, we can sample the surface of Ryugu,” the team adds.
“With test results obtained that exceeded expectation,” the twitter posting notes, “the sampler team celebrated for a good new year.”
To view the high-speed camera results, go to:

Credit: Lu Liangliang/CNSA
China’s future plans for the Moon include creation of an International Lunar Research Station.

Credit: Lu Liangliang/CNSA
In a February 12 presentation, China’s Lu Liangliang provided an overview of the status of the Chang’e-4 mission at the United Nations Office for Outer Space Affairs (UNOOSA) Scientific and Technical Subcommittee in Vienna.
Lu’s talk highlighted China National Space Administration (CNSA) planning under the title “The introduction of Chang’e-4 mission.” The charts presented give an overview of the vision of future Chinese lunar exploration activities.
Modular design
Regarding the International Lunar Research Station, Lu’s power points noted that the station is to adopt a functional modular design, making use of standardized interfaces to facilitate expansion and international cooperation with other nations.
Partners can jointly build lunar and lunar orbital infrastructure to achieve that cooperation.

Credit: Lu Liangliang/CNSA
Robotic exploration
As for future robotic exploration, Lu noted that Chang’e-7 will conduct a comprehensive survey on the Moon’s south pole to investigate the topography, material composition and space environment of the Moon.
Chang’e-8, in addition to continuing scientific testing, verification of key technologies will be carried out. Two to three missions are planned to be completed before 2030.
A new scientific data policy was released in 2016, with Lu underscoring that data on Chang‘e- 1, 2 and 3, as well as future Chang‘e-4, 5, Mars mission, and lunar samples can be applied.
Data policy
China’s scientific data policy is founded upon a basic principle: openness and sharing, Lu’s charts point out.
Under the title Management Organization, Lu’s charts explain that, on behalf of CNSA, the Lunar Exploration and Space Engineering Center (LESEC) is responsible for the management of scientific data from lunar and deep space missions. China’s National Astronomical Observatory is responsible for receiving, processing and storing scientific data.
To review the complete power point presentation, go to:
http://www.unoosa.org/documents/pdf/copuos/stsc/2019/tech-03E.pdf

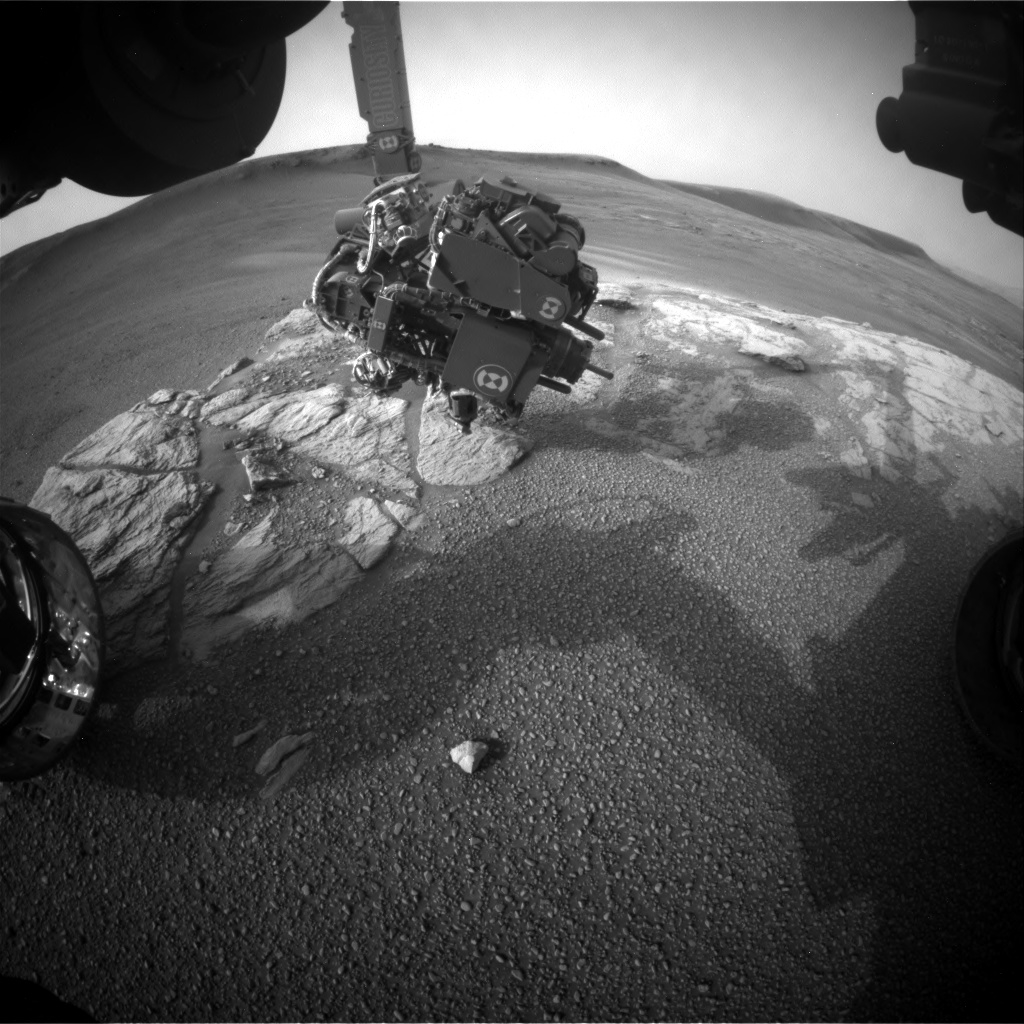
Image shows the current Curiosity workspace. This is a block of more coherent bedrock, surrounded by rubbly terrain, with lots of small rocks, pebbles and sand.
Photo acquired by Curiosity Front Hazcam Left A on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2322 duties.
“Our weekend plan brought us to a block of coherent rock, a treat after spending many workspaces in more broken up and rubbly areas,” reports Catherine O’Connell-Cooper, a planetary geologist at the University of New Brunswick; Fredericton, New Brunswick, Canada.
Mars researchers have planned a 3-sol plan, with contact science, imaging, environmental monitoring and a drive.

Curiosity ChemCam Remote Micro-Imager photo acquired on Sol 2320, February 14, 2019.
Credit: NASA/JPL-Caltech/LANL
Midland Valley
The Geology (GEO) theme group uplinked lots of contact science so they are ready to leave and drive to the next coherent block that has been identified in the distance – a target known as “Midland Valley.”
“Before leaving however, we planned contact science on “Ladder Hills,” a beautiful example of laminated bedrock,” O’Connell-Cooper notes.

Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2320, February 14, 2019.
Credit: NASA/JPL-Caltech/LANL
Curiosity’s Alpha Particle X-Ray Spectrometer (APXS) will be used to determine the chemistry, to compare it to our other targets in this workspace “Gannet” and “Curlew.”
Also, the rover’s Mars Hand Lens Imager (MAHLI) will take images of the laminations within Ladder Hills from two different angles – straight downwards onto the rock surface (the spot where APXS will also analyze), and from an oblique angle, ChemCam will acquire active LIBS (laser) analysis of Ladder Hills, in addition to analysis of “Fyvie,” a large pebble for comparison with bedrock targets, O’Connell-Cooper adds.

Curiosity Navcam Left A image taken on Sol 2320, February 14, 2019.
Credit: NASA/JPL-Caltech
Laminations in the workspace
The current plan features lots of Mastcam imagery.
Both Fyvie and the post-drive Autonomous Exploration for Gathering Increased Science (AEGIS) target will be imaged, in support of Chemistry and Camera (ChemCam) science activities. Two mosaics will focus on the laminations in the workspace, in the targets Ladder Hills, “Ladyburn” and “Loch Gelly.”
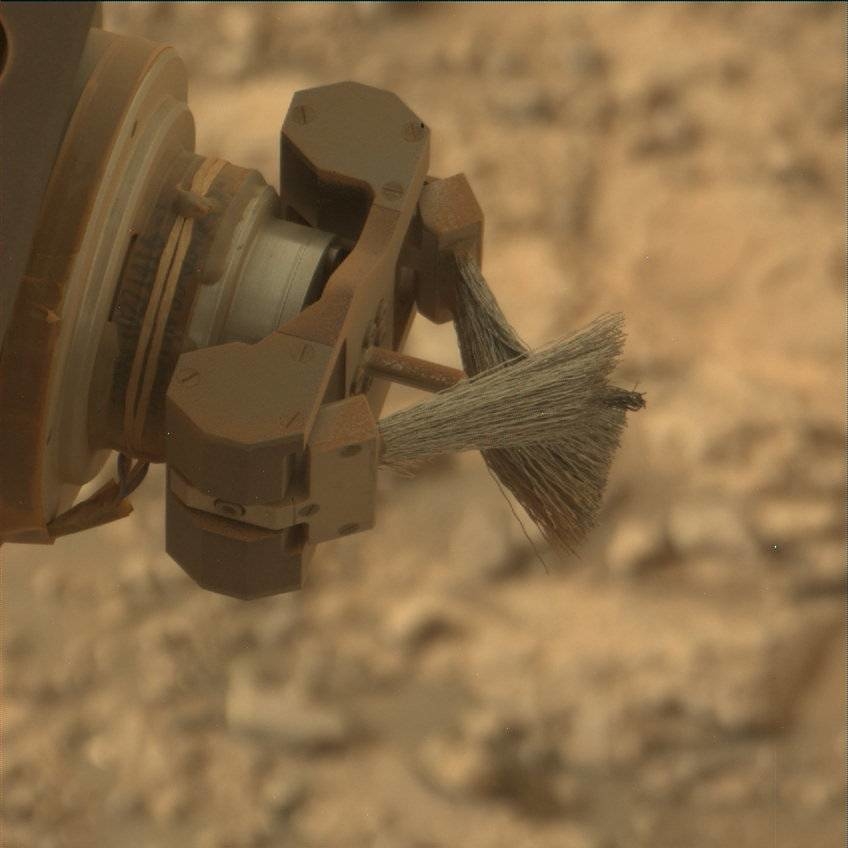
Multispectral documentation will be taken of the Curlew target, which was recently brushed.
Scuffing up sand
“Midway to our next stop at Midland Valley, we will stop at a small ripple field. Using Mastcam, we will image the undisturbed sand, before scuffing using the right wheel, back away a little, and then take another Mastcam image of the disturbed sand,” O’Connell-Cooper explains. “These images will be used to further characterize the physical properties of the sand in this area.”
Then the robot’s drive resumes, hopefully ending on bedrock for the weekend plan.

Curiosity Navcam Left A image taken on Sol 2319, February 13, 2019.
Credit: NASA/JPL-Caltech
Post-drive duties
“Following the drive, APXS will do overnight measurements of argon in the atmosphere, as part of a long range experiment looking at changes in argon abundances and seasonal variations,” O’Connell-Cooper reports.
In parallel to the very full GEO plan, the Environmental (ENV) theme group also has a very full plan. The main ENV activity is a ChemCam Passive Sky observation, which measures the column abundance of water vapor, oxygen, water ice and dust in the atmosphere, and also gives researchers some idea of dust and water ice particle sizes.
“This is particularly interesting as we just had some regional dust storm activity on Mars, so there’s still quite a lot of dust in the atmosphere above the rover,” O’Connell-Cooper says. “For this reason, we’re also very interested in the two Mastcam atmospheric opacity measurements in this plan, which will tell us how much dust is still up there; recently, opacities have been trending down.”

Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2320, February 14, 2019. MAHLI is on the turret at the end of the rover’s robotic arm.
Credit: NASA/JPL-Caltech/MSSS
Looking at clouds
ENV has planned some Navcam movies, as part of an ongoing campaign to examine martian clouds, their properties and abundances.
The “zenith” movie looks directly upwards to look at clouds and their direction, whilst the “suprahorizon” movie is targeted in a more horizontal direction, looking at clouds and variations in optical depth in the atmosphere above the north rim of the crater.
Movies and surveys
O’Connell-Cooper adds that ENV also planned Navcam and Mastcam “dust devil” movies and surveys, which measure the number, location, and characteristics of dust-filled convective vortices, which in turn tells us about surface heating, convection, and winds near the surface.
“These observations are targeted lower than the suprahorizon movies, to search for dust devils across the crater floor on the slopes of Mount Sharp,” O’Connell-Cooper notes. “Excitingly, this plan sees the very first use of Mastcam to take a dust devil movie, which will give color images and better resolution — although over a smaller region) — than Navcam.”

Credit: NASA/GSFC/Arizona State University
NASA’s Lunar Reconnaissance Orbiter (LRO) has observed the landing site of China’s Chang’e-4 lunar probe for the third time, capturing a much sharper view.
LRO passed nearly overhead the Chang’e-4 landing site on Feb. 1, giving a 0.85-meter per pixel picture of the lander and Yutu-2 rover (Jade Rabbit-2) from an altitude of 50 miles (82 kilometers). The view had close to the smallest pixel size possible in the current LRO orbit.

NASA’s Lunar Reconnaissance Orbiter (LRO).
Credit: NASA/Goddard Science Visualization Studio (SVS)
LRO officials said the rover was 95 feet (29 meters) northwest of the lander, but the rover had likely moved since the image was acquired. The LRO will continue to image the site as the lighting changes…and the rover roves.
Slant angle
On Jan. 30 and Jan. 31, the LRO snapped the landing site for the first and second time respectively, but both in a slant angle.

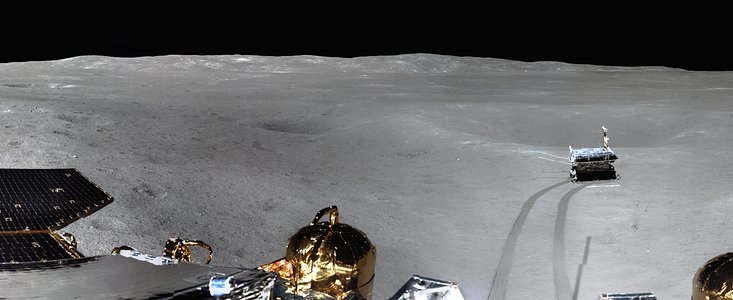
Chang’e-4 lander as observed by Yutu-2 rover.
Credit: CNSA/CLEP
China’s Chang’e-4 probe, launched on Dec. 8 in 2018, landed within the Von Kármán crater in the South Pole-Aitken Basin on the farside of the Moon on Jan. 3.

Image of China’s Yutu-2 lunar rover taken by Chang’e-4 lander.
Credit: CNSA/CLEP
Chang’e-4 set down on a relatively small farside mare basalt deposit. Chang’e-4’s landing site was named Statio Tianhe by the International Astronomical Union.
In an interview with China Central Television (CCTV), Ye Jianpei, chief commander of the Chinese Lunar Exploration Program said “the control and obstacle avoiding ability of our Chang’e-4 probe has been improved to meet the advanced world level.”
“This lays a foundation for our future landing on the Moon, no matter whether it will be on the South Pole or North Pole, or anywhere else, and I believe, for our future manned space mission,” Ye said.
Go to this video overview of the LRO observations of the Chang’e-4 landing site:
https://youtu.be/UnsYxf3xm1Y?list=PLpGTA7wMEDFjObXjRev2fcG4UxGNaBmWI
Also, go to this video that details the new names given to features at the Chang’e-4 landing site:

Hayabusa2 sampler arm operations.
Credit: JAXA/Screengrab Inside Outer Space
Preparations for touchdown of Japan’s Hayabusa2 on asteroid Ryugu are steadily proceeding.
Touchdown time on February 22 is around 8:00 am JST. The touchdown location is an area named L08-E1, just beside the location of earlier ejected target marker.

On the left image, this is location L08-E1, where TM is the target marker. The size of the spacecraft is shown in the lower left. Planned touchdown location on asteroid is marked with a red dot.
Credit: JAXA

Credit: JAXA

Credit: JAXA
“Because the width is only about 6 meters here, very precise navigation guidance is necessary, but our examination has confirmed that this is possible,” according to Hayabusa2 officials.
The Japan Aerospace Exploration Agency (JAXA) recently briefed reporters on the plan ahead.
Here are some key charts regarding the mission and steps ahead:

Credit: JAXA

Chang’e-4 lander as observed by Yutu-2 rover.
Credit: CNSA/CLEP
Five sites on the Moon’s farside now have official names, including the landing site of China’s Chang’e-4 mission.
The names have significance in Chinese culture, reflecting the background of the probe’s team.
The International Astronomical Union (IAU) Working Group for Planetary System Nomenclature has approved the name Statio Tianhe for the landing site where the Chinese spacecraft Chang’e-4 touched down on January 3 this year – the first-ever landing on the farside of the Moon.
The name Tianhe originates from the ancient Chinese name for the Milky Way, which was the sky river that separated Niulang and Zhinyu in the folk tale “The Cowherd and the Weaver Girl”.
Yutu-2 rover after rolling off Chang’e-4 lander.
Credit: CNSA/CLEP
Other features named
In an IAU statement, four other names for features near the landing site have also been approved.
In keeping with the theme of the folk tale, three small craters that form a triangle around the landing site have been named Zhinyu, Hegu, and Tianjin, which correspond to characters in the tale. They are also names of ancient Chinese constellations from the time of the Han dynasty.
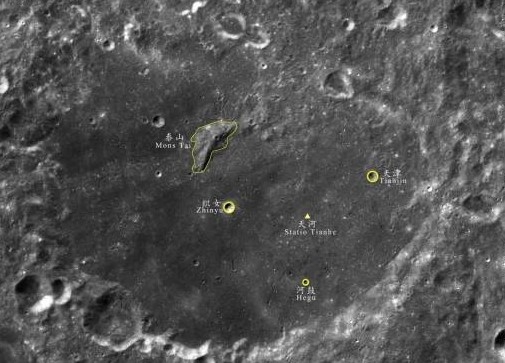
Credit: CNSA
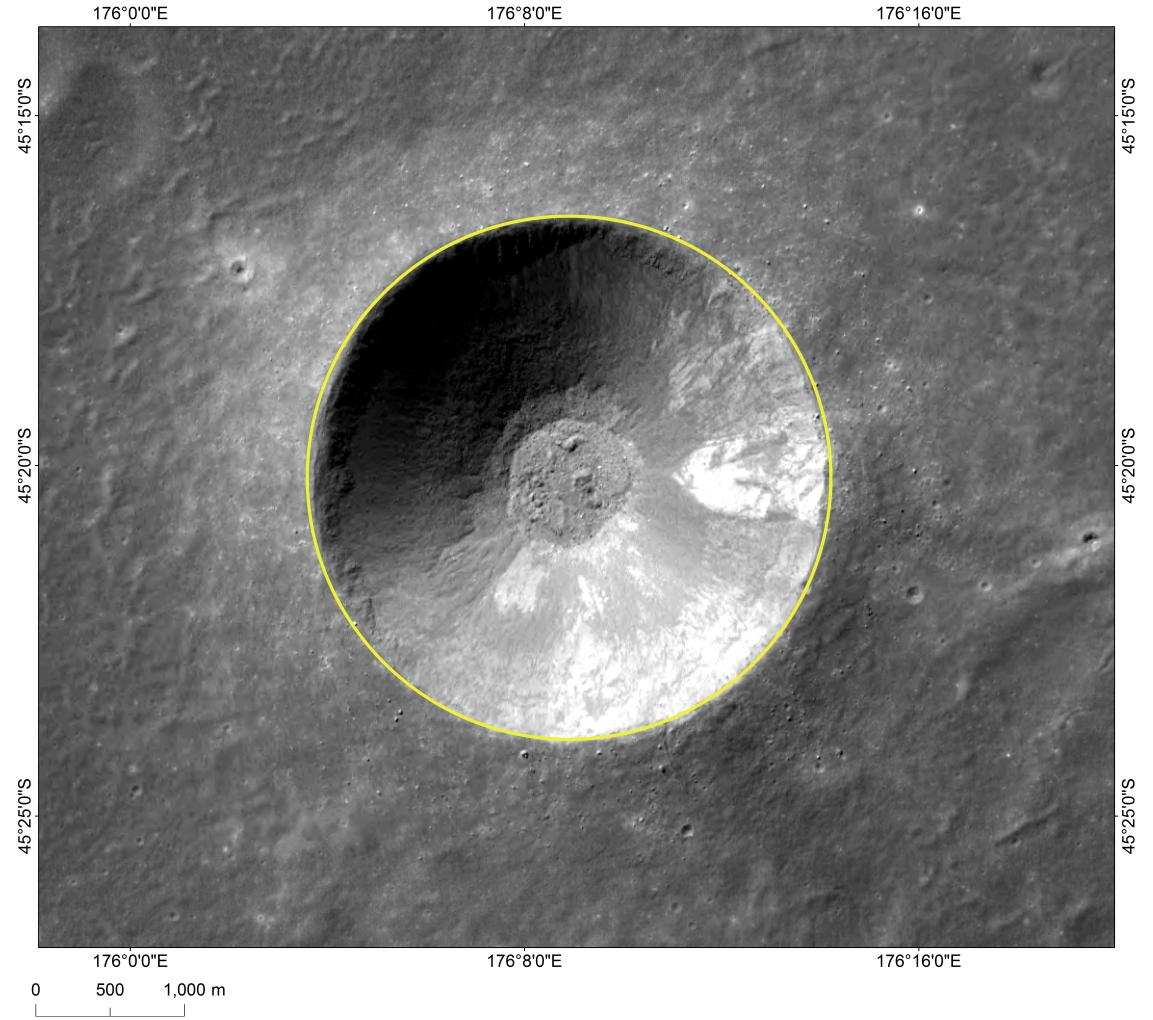
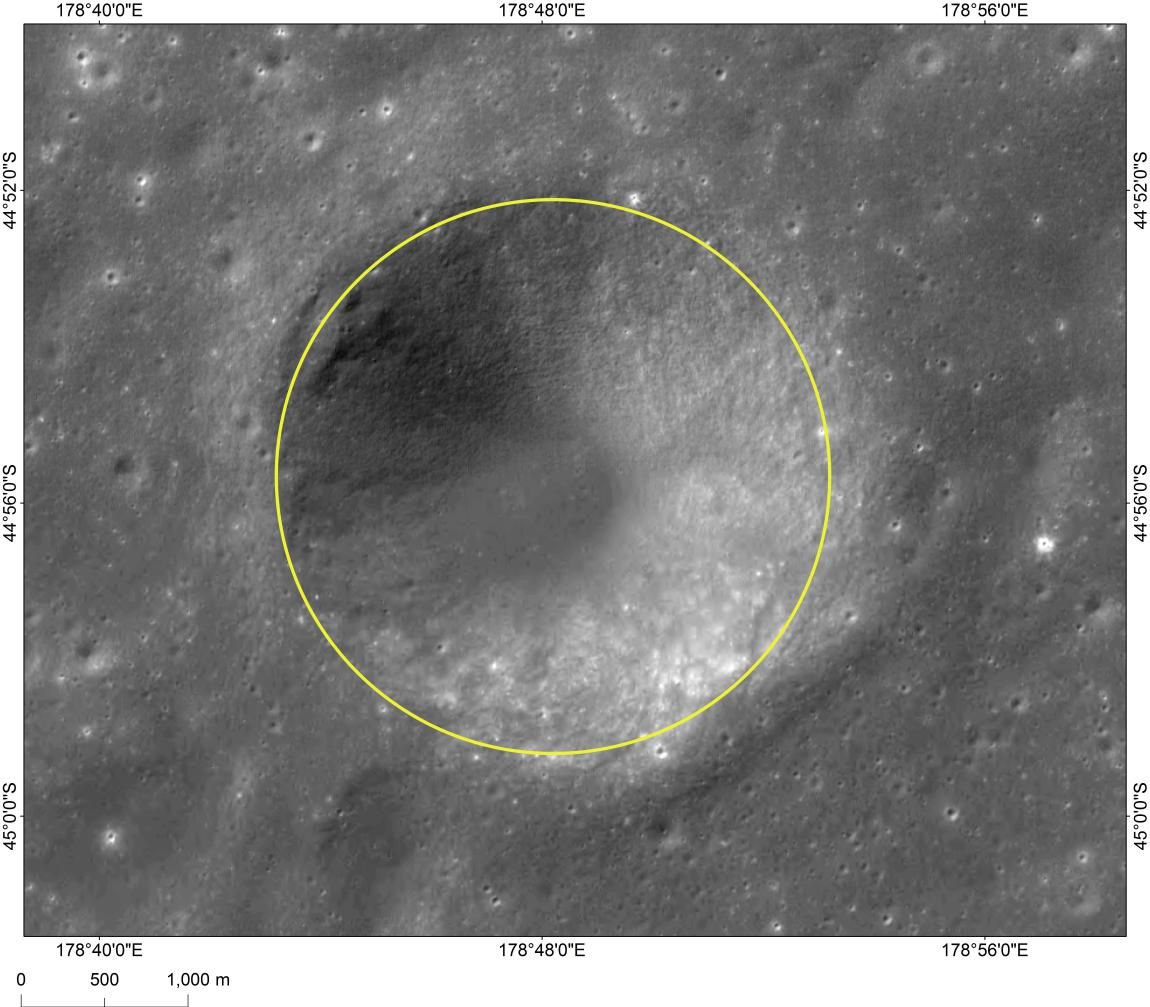
The fifth approved name is Mons Tai, assigned to the central peak of the crater Von Kármán, in which the landing occurred. Mons Tai is named for Mount Tai, a mountain in Shandong, China, and is nearly 30 miles (46 kilometers) to the northwest of the Chang’e-4 landing site.
The central peak, Mons Tai, in the lunar crater measures 1,565 meters in height from its base.

Image of Mons Tai, a hill near “Statio Tianhe”, the landing site of China’s Chang’e-4 lunar probe.
Credit: CNSA
Zhinyu crater
Credit: CNSA
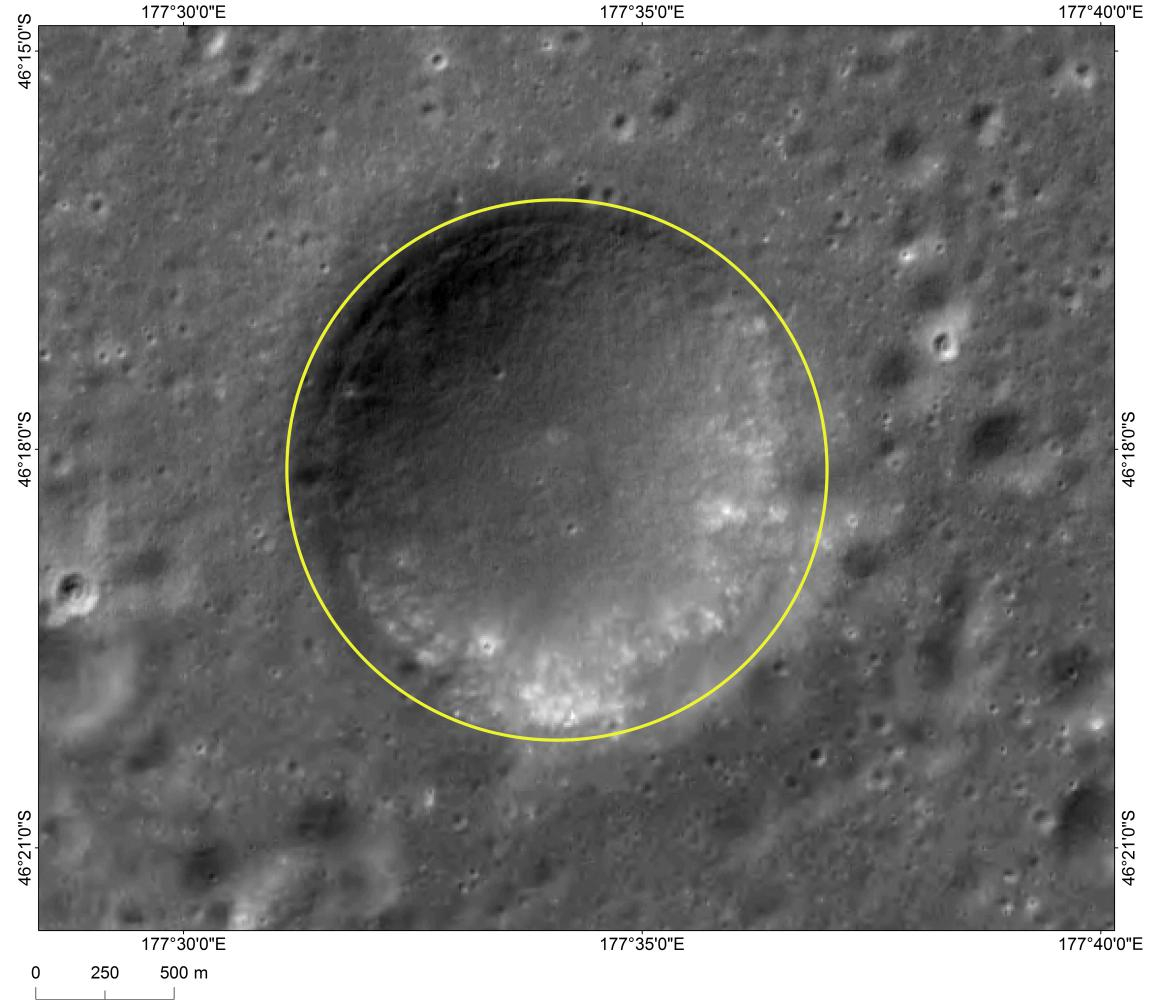
Hegu crater
Credit: CNSA
Tianjin crater
Credit: CNSA
Credit: Robotic Exploration Lab/Stanford University
NanoRacks has announced the firm has successfully completed its sixth CubeSat deployment mission from Northrop Grumman’s Cygnus spacecraft.
Cygnus (S.S. John Young) departed the International Space Station on February 8th, 2019 and performed a number of on-orbit activities, including the NanoRacks deployment on February 13th.

Northrop’s Cygnus departs International Space Station.
Credit: NASA
KickSat-2
One of those deployments was the KickSat-2, let loose well below the International Space Station altitude due to the satellite sub-deploying smaller “ChipSats,” also known as “Sprites.”
Given their size they are dubbed femtosatellites.
These ultra-tiny spacecraft include power, sensors, and communication systems on a printed circuit board measuring 3.5 by 3.5 centimeters, with a thickness of just a few millimeters and a mass of just a few grams.
Chip-scale sensors
The Sprite has a microcontroller, radio, and solar cells and is capable of carrying chip-scale sensors like magnetometers, gyroscopes, and radiation sensors.
To lower costs, Sprites are designed to be deployed hundreds at a time in low Earth orbit and to simultaneously communicate with a ground station receiver.
The ChipSats are expected to be in orbit for merely a few days before burning up.
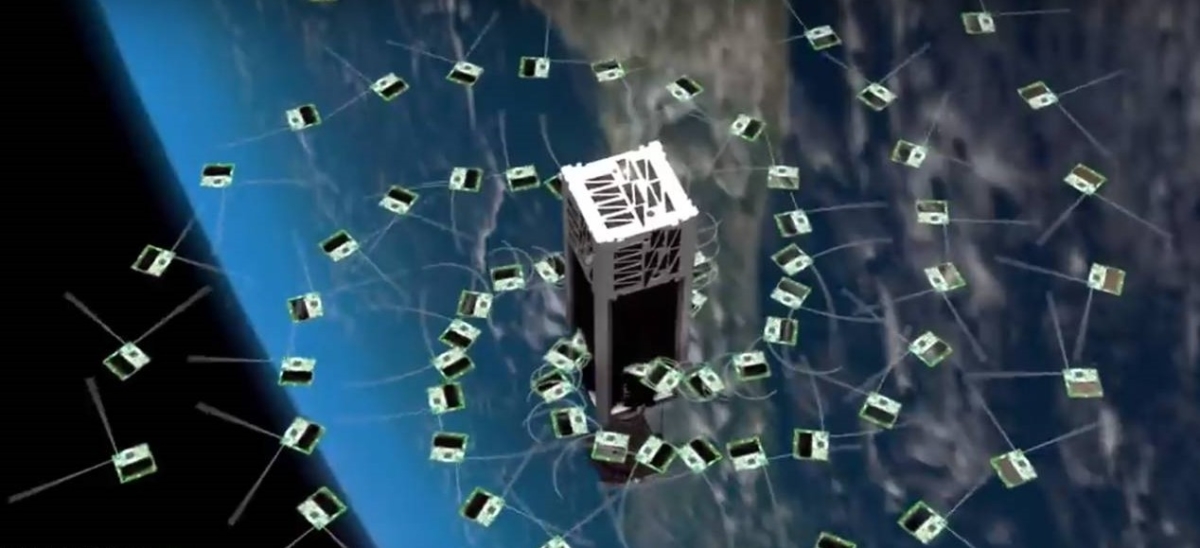
KickSat2 depiction of a hundred ChipSats.
Credit: Robotic Exploration Lab/Stanford University/Screengrab Inside Outer Space
Technology testbed
The goal of KickSat is to dramatically lower the cost of spaceflight, making it easy enough and affordable enough for anyone to explore space.
This can be realized by shrinking the size and mass of the spacecraft, allowing many to be launched together.
KickSat also serves as a technology testbed for networking and swarming algorithms for small spacecraft.
For a video on KickSat-2 effort, go to:
https://www.youtube.com/watch?time_continue=10&v=I7xvQgClMf0
For more information on the innovative NanoRacks company, go to:
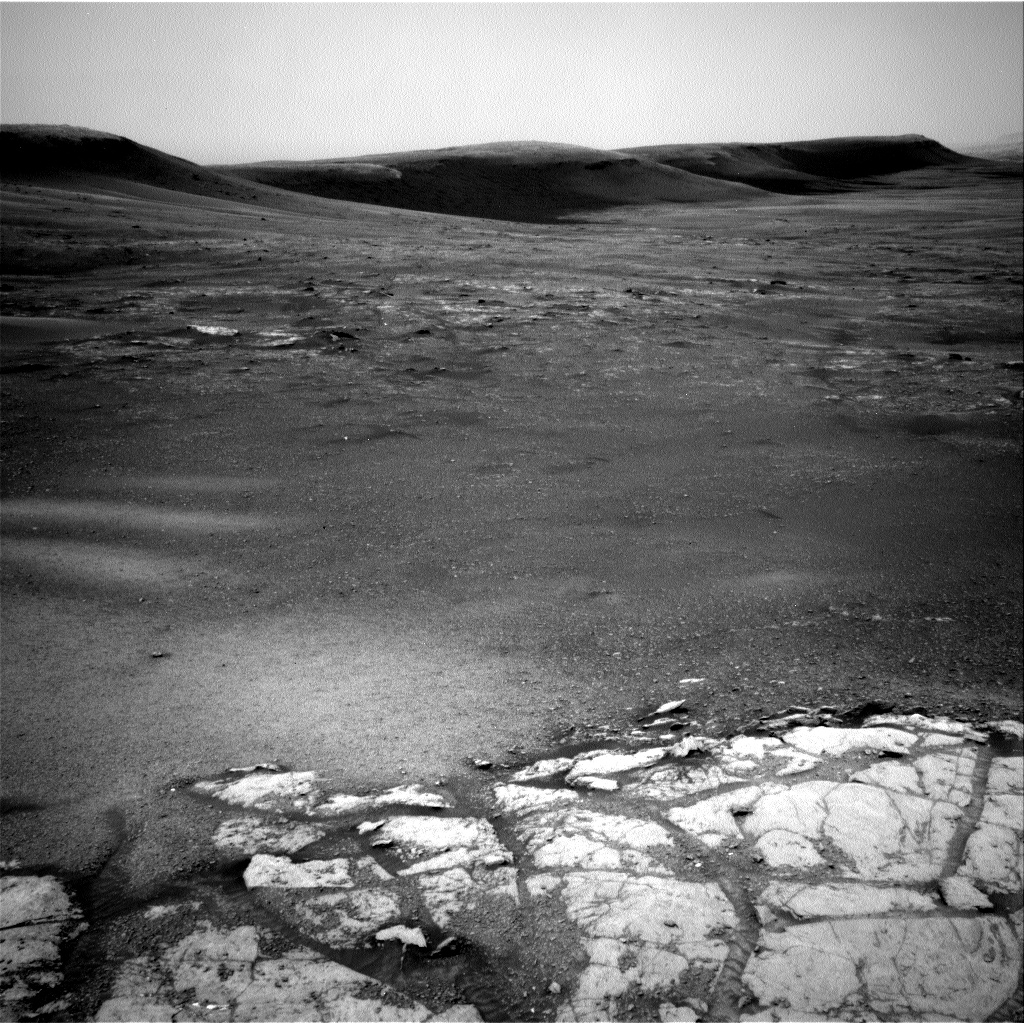
Image of the Glen Torridon area. The bright exposure of rock in the foreground is the top of the area being interrogated by the contact science instruments in the plan tosol. This gives way to the rubbly and sandy terrain in the background, with a few areas of bedrock exposure, flanked by the southern edge of the Vera Rubin Ridge behind.
Photo acquired by Curiosity Navcam Left A on Sol 2316, February 10, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2320 duties and at work within the Glen Torridon site.
Reports Lucy Thompson, a planetary geologist from the University of New Brunswick, Fredericton, New Brunswick, Canada: “Similar to its namesake in Scotland, the Glen Torridon area on Mars affords us stunning vistas, but in our case, of the relatively low-lying clay bearing (from orbit) unit flanked to the north by the higher ground of the Vera Rubin Ridge and to the south, by Mount Sharp.”
Curiosity Front Hazcam Left A image taken on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech
Scenic views
Mars scientists have been capturing the scenic views with the rover’s Mastcam, Navcam and Front Hazcam cameras, “and stopping for a taste of what this area has to offer by analyzing the local terrain with our suite of contact science instruments,” Thompson adds, as well as with the Chemistry and Camera (ChemCam) and Mastcam.

Curiosity Mastcam Left image taken on Sol 2317, February 11, 2019.
Credit: NASA/JPL-Caltech/MSSS
“The drive we took over the weekend went off without a hitch and placed us on one of the few examples of more coherent, in-place bedrock exposures in the area,” Thompson notes. “As such, we decided to put the brakes on and take some time to investigate in more detail.”
Bedrock brushing
The schedule calls for deployment of Curiosity’s robotic arm to first brush a typical area of bedrock called “Curlew.” This action removes as much of the Mars surface dust as possible, before taking close-up images of the target with the robot’s Mars Hand Lens Imager (MAHLI) and then analyzing it for chemistry with the Alpha Particle X-Ray Spectrometer (APXS).

Curiosity Mars Hand Lens Imager (MAHLI) produced on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech/MSSS
“The arm will also place us to take close up MAHLI images and obtain chemistry with APXS of another slightly different looking area (color and texture) of exposed bedrock (“Gannet”),” Thompson says. “To complement these observations, we also planned ChemCam laser-induced breakdown spectroscopy (LIBS) on the “Gannet” target, and Mastcam multispectral observations to cover both targets to look for spectral variations across the outcrop.”
Mixture of rubbly rock and sand
ChemCam is also set to investigate the composition of two other bedrock targets (“Beryl” and “Ladyburn”), and a pebble target (“Southness”) with LIBS and Mars researchers will increase the color image coverage of this exposure with Mastcam.
Curiosity Mars Hand Lens Imager (MAHLI) produced on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech/MSSS
The rover’s Dynamic Albedo of Neutrons (DAN) is slated to perform active and passive measurements, included to investigate the distribution of subsurface hydrogen in the bedrock and regolith.
“We also planned a large Mastcam mosaic to capture the view out the front window. It will include the cliffs of the Vera Rubin Ridge as well as the drive direction, which is a mixture of rubbly rock and sand and low-lying bedrock exposures, one of which (“Midland Valley”) we hope to drive to next,” Thompson reports.

Curiosity Navcam Right A image acquired on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech
Fun, busy day
“The data we collect will help us to compare the Glen Torridon area with other regions we have encountered on the mission; specifically the rocks we analyzed on the Vera Rubin Ridge, as well as the other Murray formation sedimentary rocks we encountered prior to the Vera Rubin Ridge,” Thompson adds. “It will also allow us to place this area in context as we continue to climb Mount Sharp.”
Curiosity Mastcam Right photo taken on Sol 2318, February 13, 2019.
Credit: NASA/JPL-Caltech/MSSS
Curiosity is also monitoring the environment as the Mars machinery tours Glen Torridon.
Also included in the plan are standard background Rover Environmental Monitoring Station (REMS) activities that monitor the daily martian weather, two Navcam dust devil movies and a Navcam dust devil survey. Also to be done is monitoring the radiation environment with Curiosity’s Radiation Assessment Detector (RAD).
“A fun, busy day of planning on Mars with lots of great observations,” Thompson concludes.

