Author Archive

Chang’e-4 lander as observed by Yutu-2 rover.
Credit: CNSA/CLEP
China’s CCTV reports all is well for the Chang’e-4 farside Moon mission.
Wu Weiren, the chief designer of China’s lunar program, notes that the Yutu-2 rover is entering into the third Moon week.

Image of China’s Yutu-2 lunar rover taken by Chang’e-4 lander.
Credit: CNSA/CLEP
Wu said the wheeled robot has finished exploring near the landing point and is rolling towards the northwest.
“We’ve gained many data in the past a few days, and we are going to reveal the data to the world,” said Wu.
Speed up the pace
“Over the past 60 years, we’ve made a lot of achievements,” Wu said, “but there is still a large distance from the world space powers. We must speed up our pace.”
“At the end of this year, we are going to launch the Chang’e-5 probe,” Wu said in the CCTV interview. “It will take samples on the Moon surface and return to the Earth. China will become the third country that is capable of such task after the United States and Russia. Next year, we will launch a Mars probe, which will orbit around the Mars, land on it and probe it.”
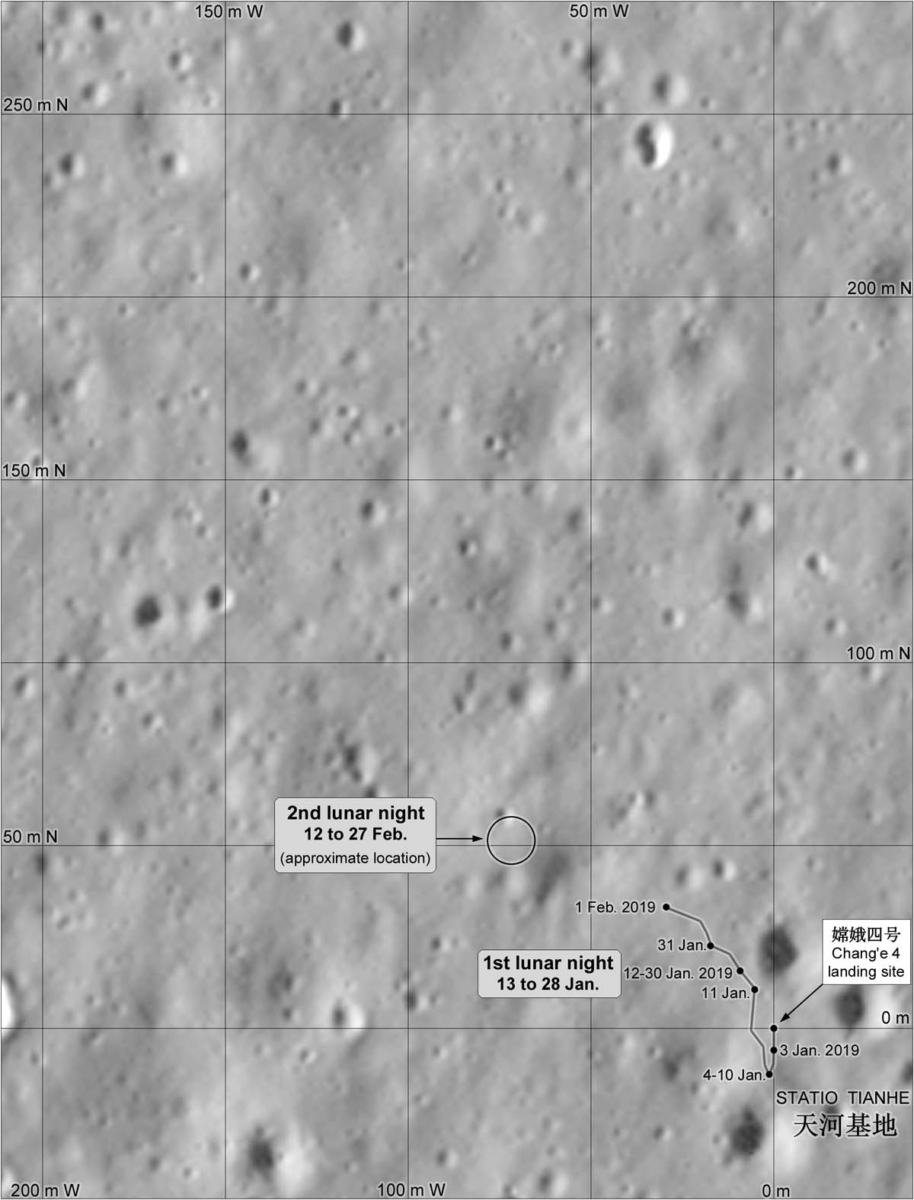
Credit: Phil Stooke
Rover nap, sleep sessions
The Yutu-2 lunar rover along with the Chang’e-4 lander was launched on Dec. 8, 2018, making the first-ever soft landing on the Von Karman Crater in the South Pole-Aitken Basin on the lunar far side on January 3.
The lunar rover had a nap in January and started its second sleep on the Moon Feb. 11 and reawakened on Feb. 28. “Currently, it is in normal condition,” said Wu.

Wu Weiren, chief designer of the lunar exploration program, presents the Chang’e-4 rover.
Credit: CCTV/Screengrab
Night on the Moon is 14 days long. This reduces the temperature on the Moon to minus 190 degrees Celsius, “a temperature that all components, parts, and electronic components cannot stand,” Wu explained. “So we let it sleep for a while, ensuring it to spend the night safely.”
According to a CGTN story, Wu added that “the road condition is not good with potholes and obstacles on it. But please rest assured we will ensure its safety.”
Wu took part in the opening of the second session of the 13th National Committee of the Chinese People’s Political Consultative Conference (CPPCC) on Sunday.

Credit: U.S. Air Force
A trio of documents explaining Pentagon plans for the Space Force and why the Trump Administration believes it is needed are available.
Space Force FAQ
Space Force Fact Sheet
United States Space Force Strategic Overview
Go to:
https://www.defense.gov/explore/story/Article/1767808/dod-submits-us-space-force-proposal/
FAQ: https://media.defense.gov/2019/Mar/01/2002095014/-1/-1/1/SPACE-FORCE-FAQ.PDF
Fact Sheet: https://media.defense.gov/2019/Mar/01/2002095013/-1/-1/1/SPACE-FORCE-FACT-SHEET.PDF
Space Force Strategic Overview: https://media.defense.gov/2019/Mar/01/2002095012/-1/-1/1/UNITED-STATES-SPACE-FORCE-STRATEGIC-OVERVIEW.PDF
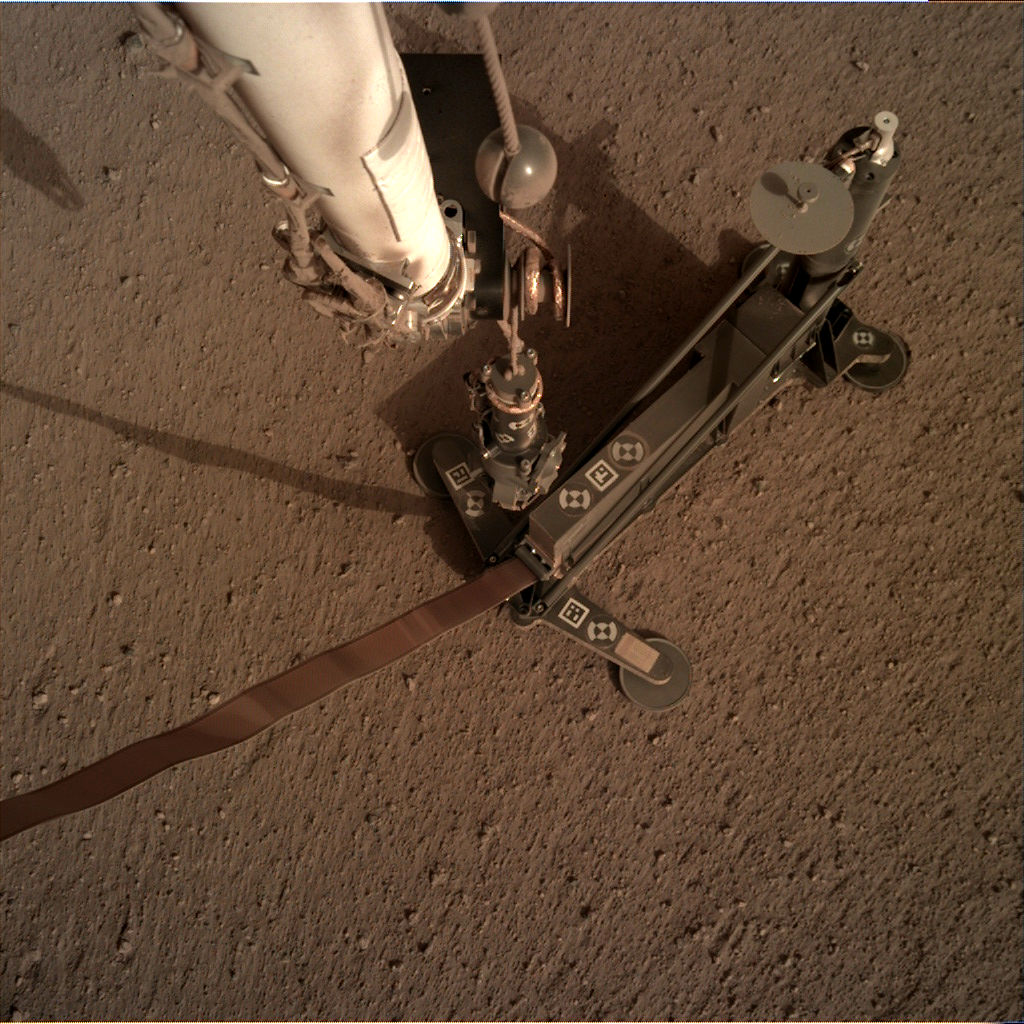
Mole on Mars begins digging.
Credit: NASA/JPL-Caltech
On February 28, 2019, the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) ‘Mole’ fully automatically hammered its way into the Martian subsurface for the first time.
The device has been deployed by NASA’s InSight Mars lander.
First step
In a first step, it penetrated to a depth between 18 and 50 centimeters into the Martian soil with 4,000 hammer blows over a period of four hours.
“On its way into the depths, the mole seems to have hit a stone, tilted about 15 degrees and pushed it aside or passed it,” reports Tilman Spohn, Principal Investigator of the Heat Flow and Physical Properties Package (HP3) experiment.
“The Mole then worked its way up against another stone at an advanced depth until the planned four-hour operating time of the first sequence expired,” Spohn said. “Tests on Earth showed that the rod-shaped penetrometer is able to push smaller stones to the side, which is very time-consuming.”

Components of the HP3 heat flow probe. Top left: the radiometer (RAD), which is used to measure the radiation temperature (roughly equivalent to the ground temperature) of the surface. Right: the casing with the mole penetrometer, the temperature measuring cable (TEM-P) and the data cable (ET) connected to the lander. In addition, the casing contains an optical length meter for determining the length of the temperature measuring cable that has been pulled from the casing. The mole contains the TEM-A active thermal conductivity sensor and the STATIL tiltmeter. Bottom left: the electronic control unit, known as the back end electronics (BEE), which remains on the lander and is connected to the probe via the ET.
Credit: DLR.
Target depth
DLR’s HP³ is a rod-shaped penetrometer that uses a fully automatic, electrically powered hammer mechanism to drive itself into the subsurface.
The target depth of 16 feet (five meters) will be achieved in 10 intervals, ideally in early April.
At least 10 feet (three meters) are required to perform heat-flow measurements.
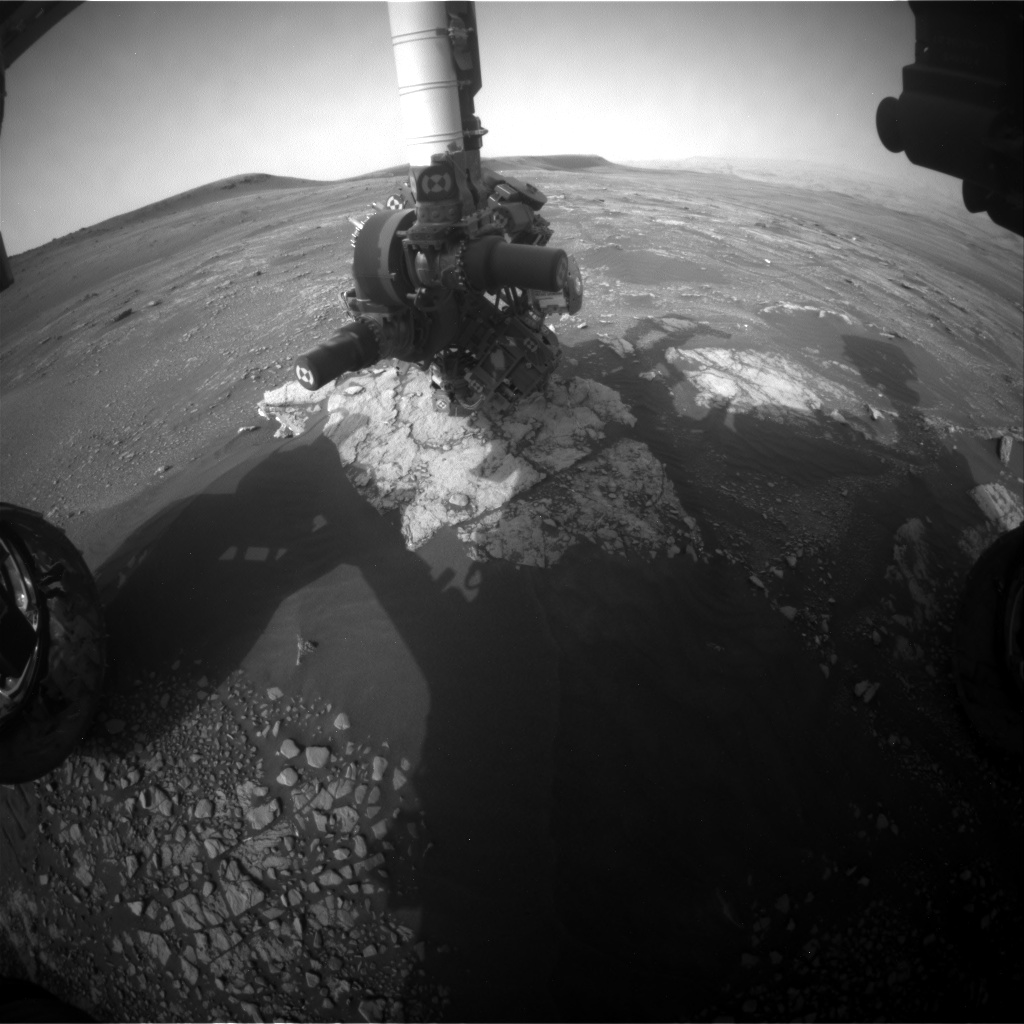
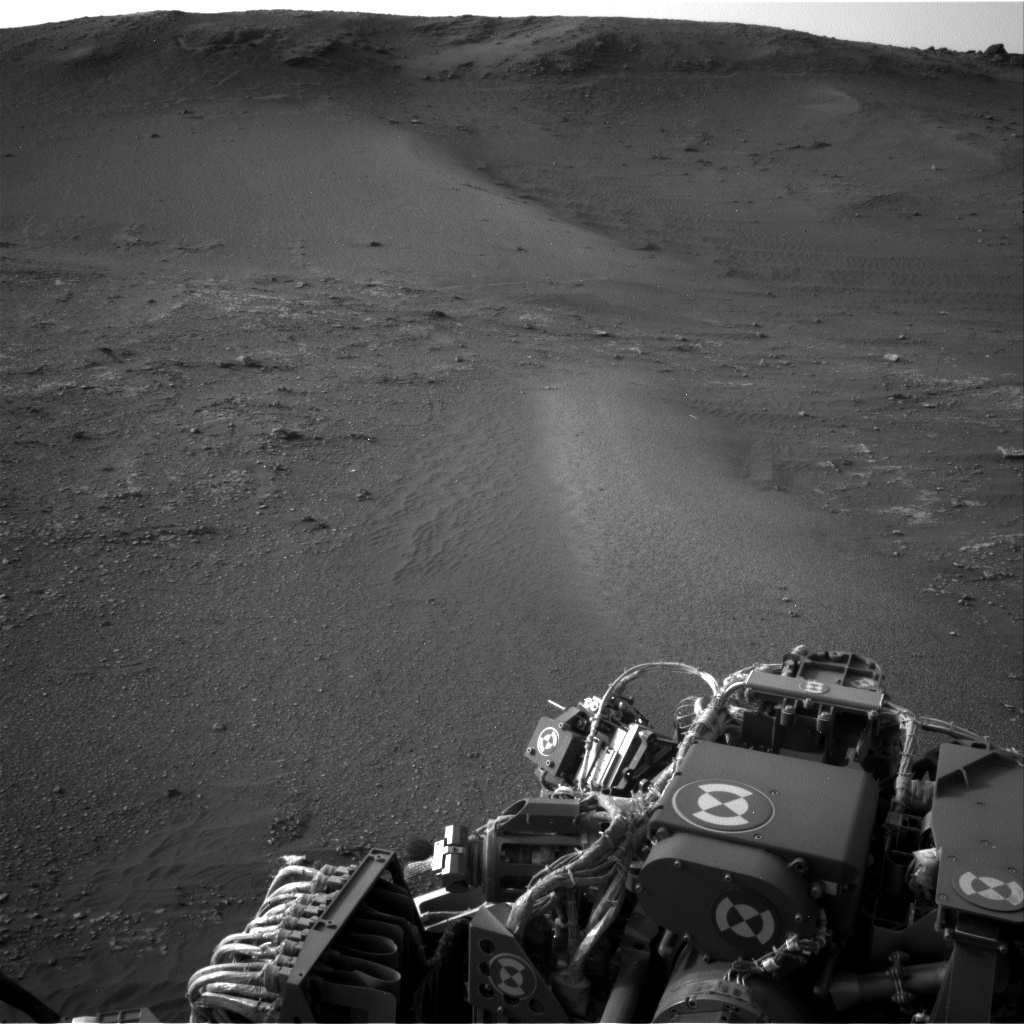
Curiosity Front Hazcam Left A photo taken on Sol 2333,February 28, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now wrapping up Sol 2334 duties.
Curiosity is back in action at Midland Valley, reports Melissa Rice, a planetary geologist at Western Washington University in Bellingham, Washington.
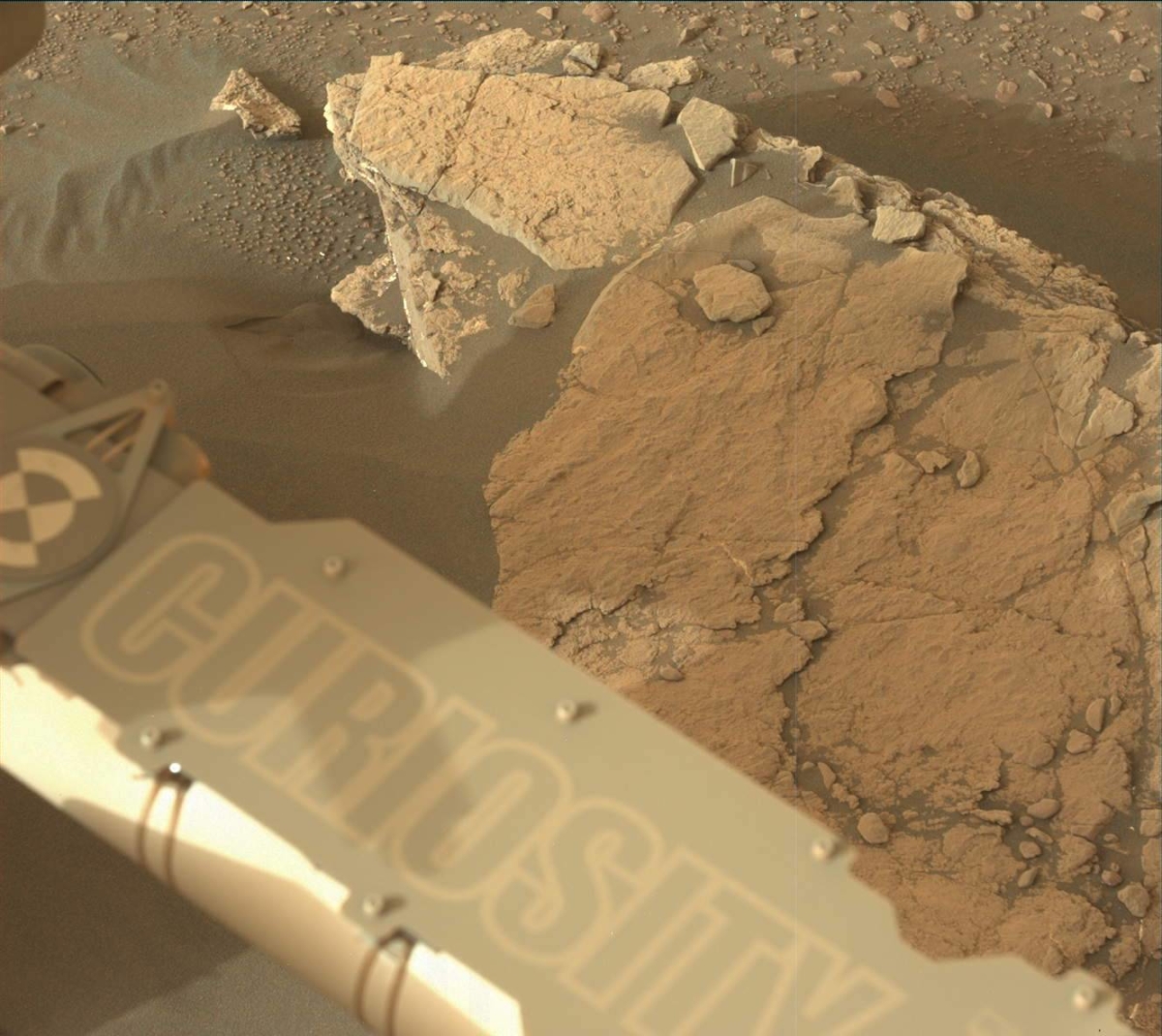
Image of the “Midland Valley” outcrop taken by Curiosity Mastcam Left. Image taken on Sol 2320, February 15, 2019.
Credit: NASA/JPL-Caltech/MSSS
The robot has returned to science after a two week hiatus because of a technical issue.
Curiosity’s most recent science plan included a drive towards a blocky outcrop called “Midland Valley.” The drive was a success, bringing the rover right on top of a targeted chunk of rock.
Safe mode
“But before we could reach out and touch it, Curiosity went into safe mode,” Rice adds. “While the engineers worked to return Curiosity to nominal operations, the science team stood down from planning, eagerly awaiting our chance to get a closer look at Midland Valley.”
Curiosity Navcam Left A photo acquired on Sol 2320, February 15, 2019.
Credit: NASA/JPL-Caltech
A new plan includes a closer look at the rock.
With Mastcam, Chemistry and Camera (ChemCam), the Mars Hand Lens Imager (MAHLI) and the Alpha Particle X-Ray Spectrometer (APXS) scientists are set to investigate two spots on the outcrop: “Alloa” and “Auchterarder.”
Look ahead

Curiosity Navcam Left A photo acquired on Sol 2320, February 15, 2019.
Credit: NASA/JPL-Caltech
Mastcam will also survey its surroundings with mosaics of wind-blown sand features (“Mormond Hill,” “Motherwell” and “Mount Keen”), as well as look back at a previous workspace (towards the previously-explored targets “Curlew” and “Gannet”).
The rover will then perform a look ahead towards a potential future drive destination (at an area with blocky outcrop called “Milltimber”), and a look up to the sky at the dust in the atmosphere, Rice explains. In addition, ChemCam will use LIBS (the laser) to investigate another rock target called “Crathes.”
“The engineering team is working hard to understand the issue that occurred on sol 2320, and upcoming plans will be dedicated to diagnostic activities,” Rice concludes, “and in the meantime, the new observations from Midland Valley will keep us scientists busy!”
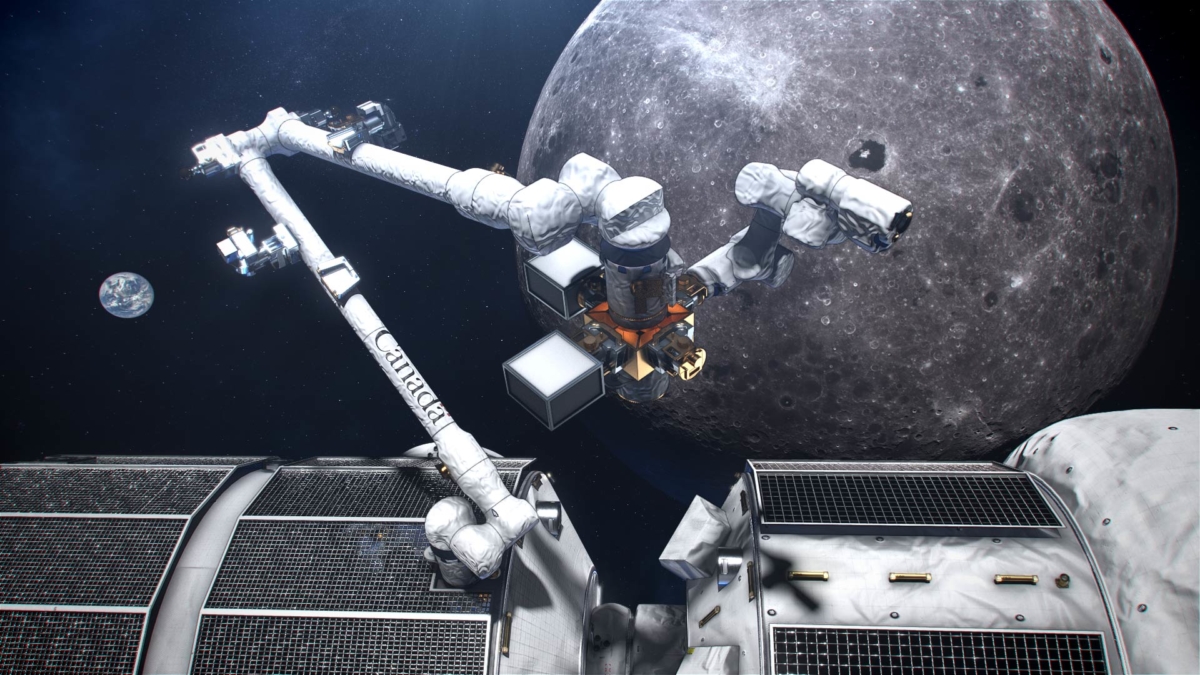
That hardware is Canadarm3, designed to repair and maintain the NASA-led Lunar Gateway.
Credit: Credit: CSA/NASA
Prime Minister Justin Trudeau has announced Canada’s new partnership in the NASA-led Lunar Gateway by developing and contributing a smart robotic system.
That hardware is Canadarm3, designed to repair and maintain the Gateway.
This smart robotic system includes a next-generation robotic arm, equipment, and specialized tools. Using software and advances in artificial intelligence, this highly-autonomous system will be able to:
- maintain, repair and inspect the Gateway
- capture visiting vehicles
- relocate Gateway modules
- help astronauts during spacewalks
- enable science both in lunar orbit and on the surface of the Moon
Test site
The ability to perform these tasks without human intervention will be vital as the Gateway will not be crewed continuously, and communications delays caused by its lunar orbit will prevent direct real-time control of the robotic system from Earth.

Credit: CSA/NASA
The United States-led Lunar Gateway is an international collaboration in human space exploration. About one-fifth of the size of the International Space Station (ISS), it will orbit the Moon and serve as a science laboratory, test site for new technologies, as well as mission control for operations on the Moon.
The Gateway is expected to be fully functional in the Moon’s orbit around 2026.

Accelerator program
Also announced by the Canadian Space Agency (CSA) on February 28 is a new Lunar Exploration Accelerator Program. This program would help Canadian businesses and academic institutions use and test new technologies in lunar orbit and on the surface of the Moon in the fields of health, artificial intelligence, and robotics.
“The program will spur innovation and new technologies that have applications here on Earth, and will help Canadians get prepared for the jobs of tomorrow in the new global space economy,” according to a CSA statement.
Historic investment
Prime Minister Trudeau explained: “Canada’s historic investment will create good jobs for Canadians, keep our astronaut program running and our aerospace industry strong and growing, while opening up a new realm of possibilities for Canadian research and innovation.”
“With the Lunar Gateway, Canada will play a major role in one of the most ambitious projects ever undertaken,” Trudeau added. “Together, with our partners from around the world, we’ll continue to push the boundaries of human ambition, and inspire generations of kids – and adults – to always aim higher and aspire to something greater.”
Video: The Prime Minister of Canada Justin Trudeau announces historic investments in Canada’s space program.
https://www.youtube.com/watch?v=JoMU4Kcdlww
Credit: Canadian Space Agency
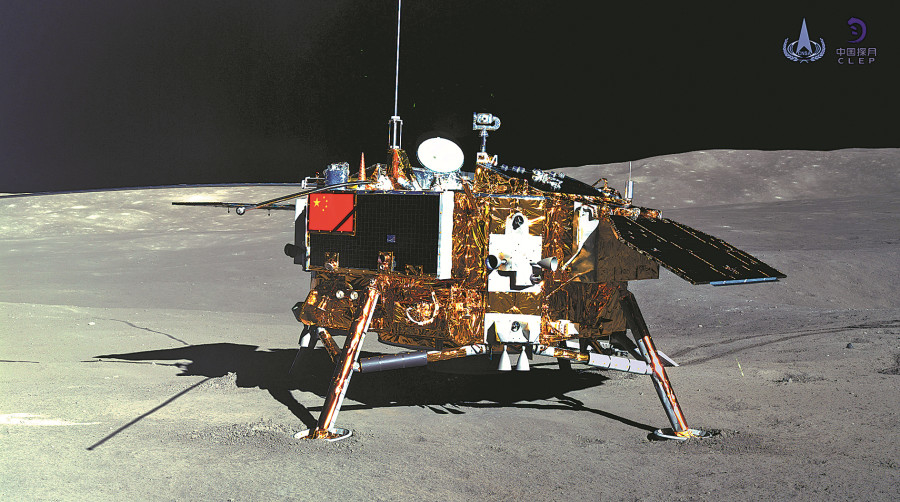
Up and operating – China’s Chang’e-4 lander.
Credit: CNAS/CLEP
China’s Chang’e-4 farside lander wakes up for third sunrise on the Moon. That’s the word according to a China Central Television (CCTV) report, as noted by China Global Television Network (CGTN).
Credit: Phil Stooke
Yutu-2 (Jade Rabbit-2), awoke at about 10:51 Thursday.
Both of them are in normal condition, according to the Lunar Exploration and Space Program Center of the China National Space Administration (CNSA).
China’s Chang’e-4 lunar mission was launched on December 8, 2018, making the first-ever soft landing within the Von Karman Crater in the South Pole-Aitken Basin on the farside of the Moon on January 3rd.

Up and operating – China’s Chang’e-4 lander.
Credit: CNAS/CLEP
Credit: Phil Stooke

Recent impacts on the Red Planet, detected by NASA’s Mars Reconnaissance Orbiter.
Credit: NASA/JPL/University of Arizona
NASA’s high-flying Mars Reconnaissance Orbiter (MRO) has imaged a recent impact event in Noachis Terra in the southern mid-latitudes of Mars.
The impact was initially discovered in a 2016 MRO Context Camera image, and was not seen in a 2009 picture. “This implies that the impact may be only two years old, but certainly no more than nine years,” according to a statement from the High Resolution Imaging Science Experiment (HiRISE) Operations Center at the University of Arizona in Tucson.

On patrol – NASA’s Mars Reconnaissance Orbiter (MRO).
Credit: NASA/JPL
Multiple impacts
“Rather than a single impact crater, we see multiple impacts like a shotgun blast. This suggests that the impactor broke up in the atmosphere on entry. Although the atmosphere of Mars is thinner than Earth’s, it still has the capacity to break up small impactors, especially ones comprised of weaker materials, like a stony meteoroid versus a iron-nickel one.”

Credit: NASA/JPL/University of Arizona
MRO imagery shows 21 distinctive craters ranging in size from 1 to 7 meters in diameter. They are distributed over an area that spans about 1,000 feet (305 meters).
“Most observed recent impacts expose darker-toned materials underlying bright dusty surfaces,” researchers Matthew Bourassa, Shannon Hibbard, Eric Pilles and Livio Tornabene report. “However, this impact does the opposite, showing us lighter-toned materials that lie beneath a darker colored surface.”

Credit: NEON/CNN
In IMAX for one week only starting March 1, everywhere March 8, from director Todd Douglas Miller comes a NEON/CNN cinematic event fifty years in the making.
Crafted from a newly discovered trove of 65mm footage, and more than 11,000 hours of uncatalogued audio recordings, Apollo 11 takes us straight to the heart of NASA’s most celebrated mission—the one that first put men on the Moon, and forever made Neil Armstrong and Buzz Aldrin into household names.
Immersed in the perspectives of the astronauts, the team in Mission Control, and the millions of spectators on the ground, this vivid experience spotlights those momentous days and hours in 1969 when humankind took a giant leap into the future.

Hayabusa2 image captured near the touchdown site roughly a minute after touchdown. The photograph was taken at roughly 80 feet (25 meters) with the Optical Navigation Camera – Wide angle (ONC-W1) on February 22, 2019 (JST).
The color of the region beneath the spacecraft’s shadow differs from the surroundings and has been discolored by the touchdown. At the moment, the reason for the discoloration is unknown but it may be due to the grit that was blown upwards by the spacecraft thrusters or by the bullet (projectile) shot from Hayabusa2 in the sampling process.
Credit: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST
Japan’s Hayabusa2 successfully touched down on asteroid Ryugu on February 22 (JST). It turns out that the gentle cosmic kiss between spacecraft and space rock wasn’t without incident.

Hayabusa2 touchdown region overlapped with the planned touchdown site. The touchdown spot sits at the center of the discolored area. Hayabusa2 researchers explain that an accurate touchdown point will be examined during a more detailed analysis in the future. Also shown is the white target marker, which is shining in the reflected sunlight.
Credit: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST
In a posted update from the team: “It was a long week for the team members! Until just before the start of the descent, we examined every aspect of landing plan to remove all doubts and increase our level of confidence. We polished the landing sequence to perfection! The team’s all-out battle was rewarded in the best possible way. We are all looking forward to the report of the results.”
Ingenuity after touchdown
“We had to use a little ingenuity for the motion of Hayabusa2 after touchdown,” the team posting adds.
“The spacecraft rose obliquely after touchdown due to the angle of the ground. This meant that in order to return to the home position, it was necessary to exert a force in a direction difficult to achieve due to the orientation of the spacecraft thrusters.”

Position of the planned touchdown site and target marker. The size of the circle at the planned site is 20 feet (6 meters) in diameter. The X indicates the position of the target marker that was dropped at a later date.
Credit: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST
Perfect somersault
“We therefore added a twist in the spacecraft attitude by performing a 1/20 turn about the Y-axis and 1/6 turn about the Z-axis before firing the thrusters, and then reversing this twist to return to the original position. This change in attitude allowed the thrusters to fire efficiently,” the posting explains.
“Hayabusa2 achieved a perfect somersault over Ryugu –like a ‘lunar somersault’— and then returned to the home position in a dignified manner. It was an ingenious performance to the end.”
Now the Hayabusa2 project team has turned to evaluating the technical score of the touchdown operation.

