Author Archive

Hominid robots for Mars, called as Charlie.
Credit: VaMEx-VTB/University of Bremen
VaMEx-VTB is a Virtual Test Bed for Swarm-based Exploration of the Valles Marineris on the Planet Mars. The effort is developing concepts, algorithms, and hardware for a swarm-based exploration of Valles Marineris.

Valles Marineris – the largest canyon in the Solar System cuts a wide swath across the face of Mars.
Credit: NASA

Multiple Swarm Units.
Credit: VaMEx-VTB/University of Bremen
The swarm comprises different elements such as rovers, Unmanned Aerial Vehicles (drones) and hominid robots (called as Charlie). The idea is to have an autonomous swarm navigation and exploration system which communicate with each other.
VaMEx-VTB is a joint venture of the University of Bremen and several other German universities financed by the German Aerospace Centre (DLR – Deutsches Zentrum für Luft- und Raumfahrt).

Credit: VaMEx-VTB/University of Bremen
For more information on this innovative look at Mars exploration, go to:
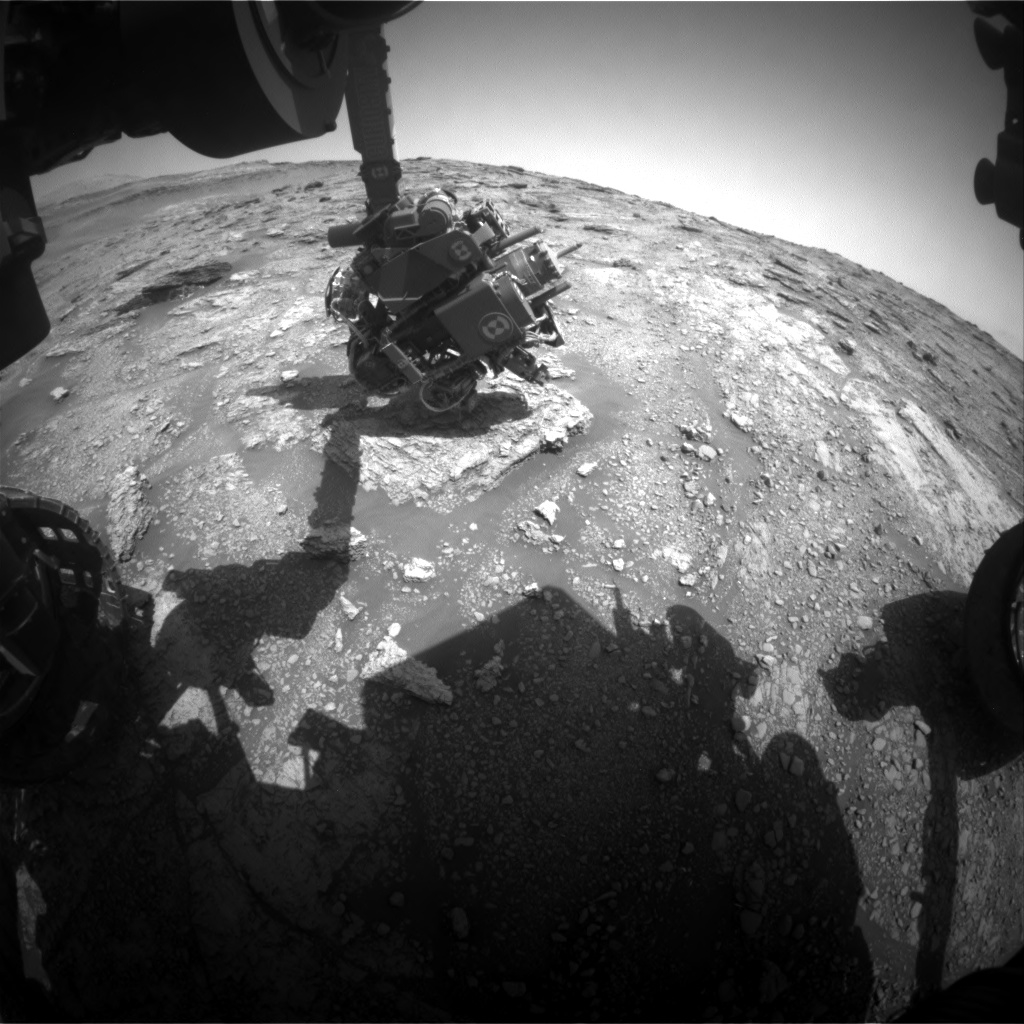
NASA’s Curiosity Mars rover is now performing Sol 2458 tasks.
Here’s the scenery as viewed by the robot, currently near the top of Harlaw Rise:

Curiosity Front Hazcam Right B image taken on Sol 2457, July 5, 2019.
Credit: NASA/JPL-Caltech

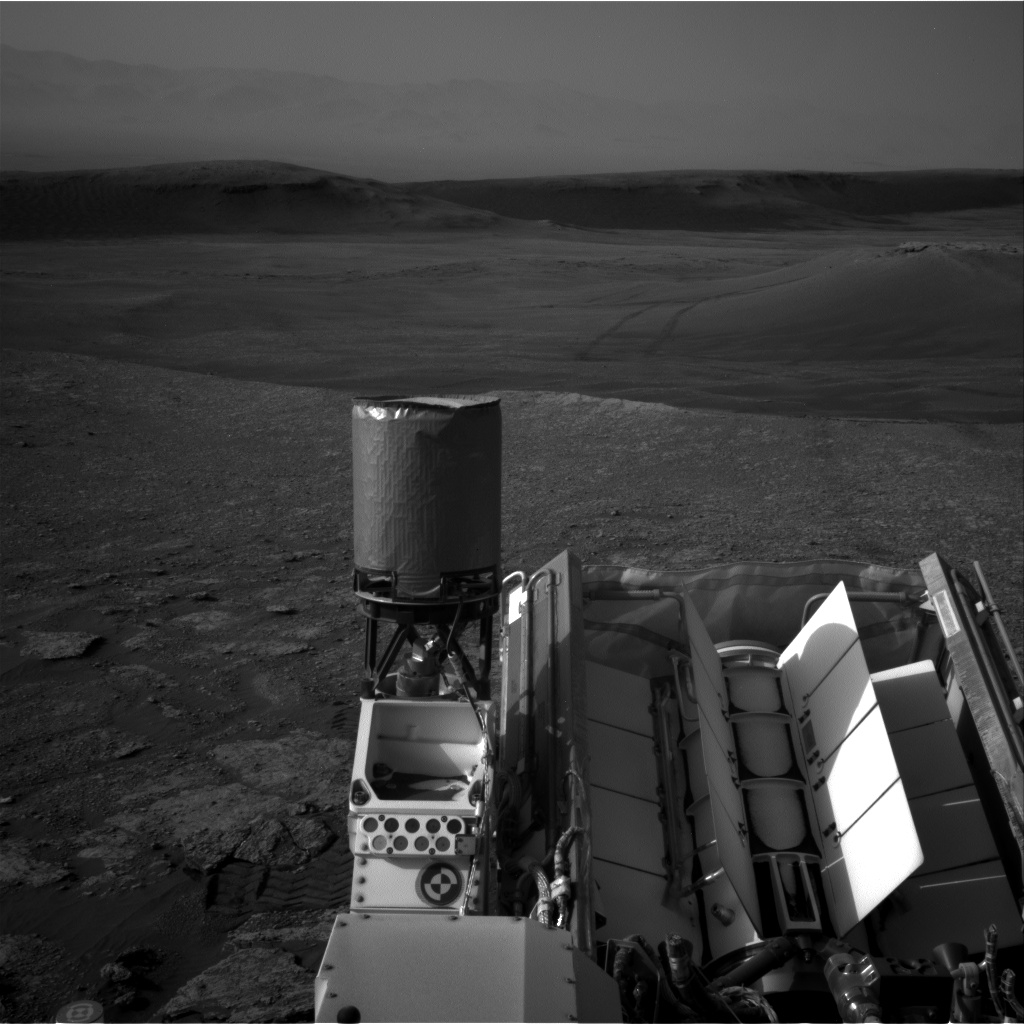
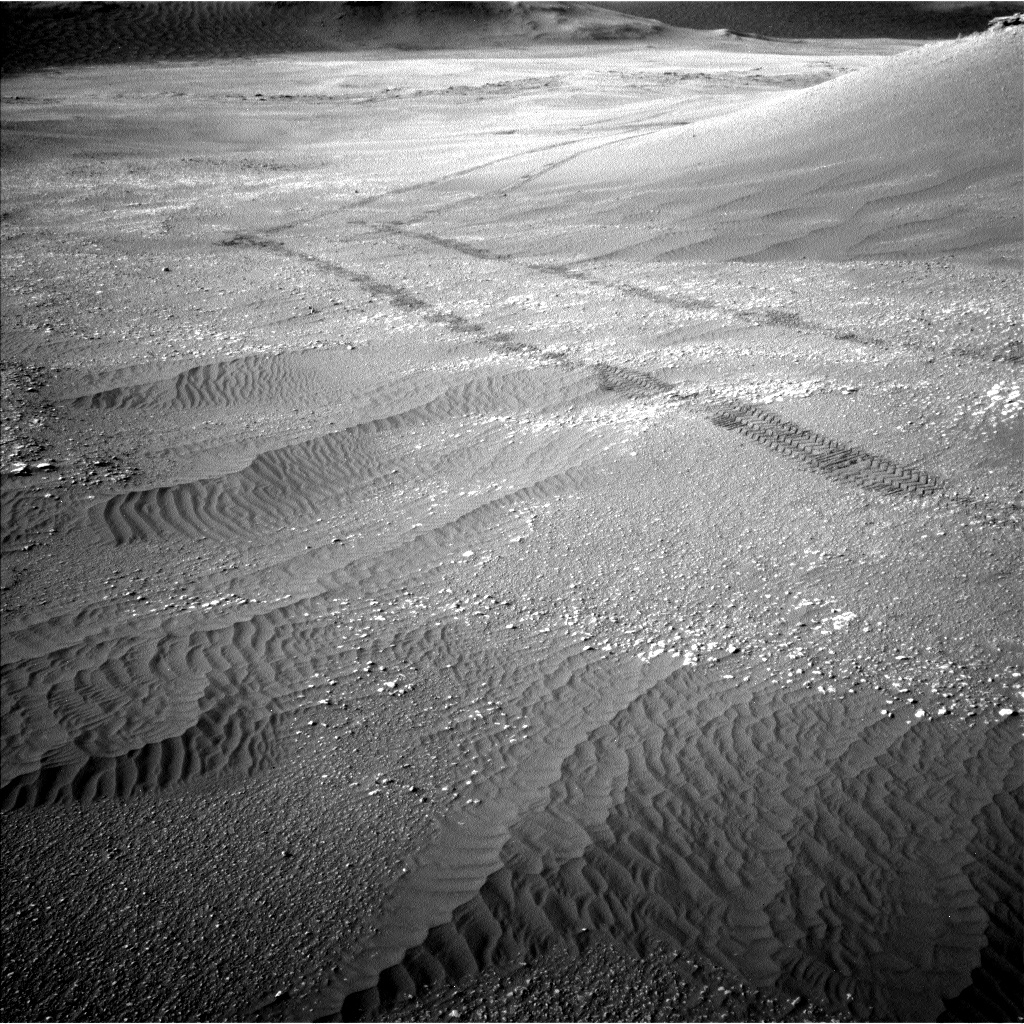
Curiosity Navcam Right B photo taken on Sol 2453, July 1, 2019.
Credit: NASA/JPL-Caltech

Curiosity Navcam Right B photo taken on Sol 2453, July 1, 2019.
Credit: NASA/JPL-Caltech

Curiosity Navcam Right B photo taken on Sol 2453, July 1, 2019.
Credit: NASA/JPL-Caltech

Curiosity Navcam Right B photo taken on Sol 2453, July 1, 2019.
Credit: NASA/JPL-Caltech
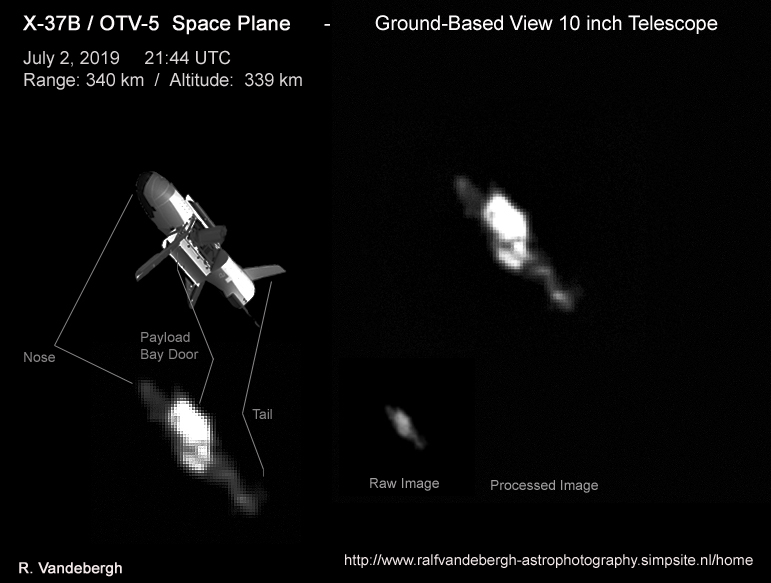
Credit: Ralf Vandebergh
Skywatcher and satellite tracker, Ralf Vandebergh of the Netherlands, has caught an over flight of the U.S. Air Force secretive X-37B space plane, also known as Orbital Test Vehicle – 5.
Vandebergh reports that he has been hunting for the OTV-5 for months and saw it visually in May.
“When I tried to observe it again mid June, it didn’t meet the predicted time and path. It turned out to have maneuvered to another orbit. Thanks to the amateur satellite observers-network, it was rapidly found in orbit again and I was able to take some images on June 30 and July 2,” Vandebergh explains.
Beyond expectations
The OTV-5’s recent pass was almost overhead, Vandebergh adds.
The OTV is a small version of the classic space shuttle. “It is really a small object, even at only [186 miles] 300 kilometers altitude, so don’t expect the detail level of ground based images of the real space shuttle.”
Considering this, the images Vandebergh says succeeded beyond expectations. “We can recognize a bit of the nose, payload bay and tail of this mini-shuttle with even a sign of some smaller detail.”
The Images were taken through a 10 inch F/4,8 aperture Newtonian telescope with an Astrolumina ALccd 5L-11 mono CMOS camera. Tracking was fully manually through a 6×30 finderscope, Vandebergh explains.

X-37B handout.
Credit: Boeing
Classified duties
The secretive mission of the U.S. Air Force X-37B mini-space plane has winged past 666 days of flight. This robotic drone is performing classified duties during the program’s fifth flight.
This Orbital Test Vehicle (OTV-5) was rocketed into Earth orbit on September 7, 2017 atop a SpaceX Falcon 9 booster from Launch Complex 39A at NASA’s Kennedy Space Center in Florida.

Air Force space plane in Earth orbit for over 666 days.
Credit: Boeing
The missions of the X-37B space planes are carried out under the auspices of the Air Force Rapid Capabilities Office, and mission control for OTV flights are handled by the 3rd Space Experimentation Squadron at Schriever Air Force Base in Colorado. This squadron oversees operations of the X-37B Orbital Test Vehicle and is tagged as the Air Force Space Command’s premier organization for space-based demonstrations, pathfinders and experiment testing, gathering information on objects high above Earth and carrying out other intelligence-gathering duties.
And that may be a signal as to what the robotic craft is doing — both looking down at Earth and upward.

Credit: Boeing
Flight-duration record
Each X-37B/OTV mission has set a new flight-duration record for the program:
OTV-1 began April 22, 2010, and concluded on Dec. 3, 2010, after 224 days in orbit.
OTV-2 began March 5, 2011, and concluded on June 16, 2012, after 468 days on orbit.
OTV-3 chalked up nearly 675 days in orbit before finally coming down on Oct. 17, 2014.
OTV-4 conducted on-orbit experiments for 718 days during its mission, extending the total number of days spent in space for the OTV program at that point to 2,085 days. It was launched in May 2015 and landed in May 2017.

Asets-II payload logo.
Credit: AFRL
On-orbit testing
On this latest clandestine mission of the space plane, all that’s known according to Air Force officials is that one payload flying on OTV-5 is the Advanced Structurally Embedded Thermal Spreader, or ASETS-II.
Developed by the U.S. Air Force Research Laboratory (AFRL), this cargo is testing experimental electronics and oscillating heat pipes for long duration stints in the space environment.
According to AFRL, the payload’s three primary science objectives are to measure the initial on-orbit thermal performance, to measure long duration thermal performance, and to assess any lifetime degradation.

The X-37B Orbital Test Vehicle mission 4 (OTV-4), the Air Force’s unmanned, reusable space plane, landed at NASA’s Kennedy Space Center Shuttle Landing Facility May 7, 2017.
Credit: USAF
Tarmac touchdown
Exactly when the OTV-5 space plane will land is unknown.
The last Air Force’s X-37B Orbital Test Vehicle mission touched down at NASA’s Kennedy Space Center Shuttle Landing Facility May 7, 2017 – a first for the program. All prior missions had ended with a tarmac touchdown at Vandenberg Air Force Base in California.
Several website postings say that the sixth mission, X-37B OTV-6, is planned for this year on a United Launch Alliance Atlas-5(501) rocket. Launch would be from Cape Canaveral Air Force Station’s Space Launch Complex-41.

Last Air Force’s X-37B Orbital Test Vehicle mission touched down at NASA ‘s Kennedy Space Center Shuttle Landing Facility May 7, 2017.
Credit: Michael Martin/USAF
Reusable vehicles
The classified X-37B program “fleet” consists of two known reusable vehicles, both of which were built by Boeing.
The X-37B Orbital Test Vehicle was fabricated at several Boeing locations in Southern California, including Huntington Beach, Seal Beach and El Segundo. The program transitioned to the U.S. Air Force in 2004 after earlier funded research efforts by Boeing, NASA and the Defense Advanced Research Projects Agency.
Looking like a miniature version of NASA’s now-retired space shuttle orbiter, the military space plane is 29 feet (8.8 meters) long and 9.6 feet (2.9 m) tall, with a wingspan of nearly 15 feet (4.6 m).
The X-37B space plane has a payload bay of 7 feet (2.1 meters) by 4 feet (1.2 meters), a bay that can be outfitted with a robotic arm. X-37B has a launch weight of 11,000 lbs. (4,990 kilograms) and is powered on orbit by gallium-arsenide solar cells with lithium-ion batteries.

Back to hangar for another flight day. U.S. Air Force X-37B/OTV-4 is rolled into facility after its May 7 landing at Kennedy Space Center.
Credit: Michael Martin/SAF
Milestone for the program
Prior to launch of OTV-5, Randy Walden, the director of the Air Force Rapid Capabilities Office said there were many firsts on this mission, making it a milestone for the program. “It is our goal to continue advancing the X-37B OTV so it can more fully support the growing space community.”
The Air Force also noted that the fifth OTV mission was launched into, and will be landed from, a higher inclination orbit than prior missions to further expand the X-37B’s orbital envelope.

Credit: NASA
Ahead of the 50th anniversary of the U.S. Moon landing, 60% say the space program has provided enough benefit to the country to justify its cost, while 38% do not consider the country’s expenditures on the space program warranted.
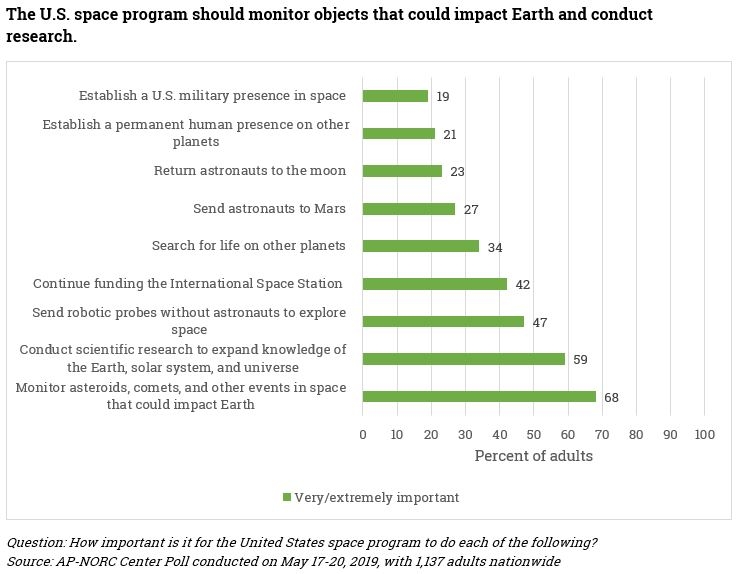
Most Americans say it is important for the space program to monitor objects including asteroids, comets, and other objects that could impact the Earth, as well as scientifically research the universe, our solar system, and the Earth.
On the other hand, the establishment of permanent human settlements on other planets or developing an American military presence in space are not considered priorities.

Earth has been on the receiving end of several incoming objects.
Credit: NASA
Robots over humans
Americans prefer a space program that focuses on potential asteroid impacts, scientific research and using robots to explore the cosmos over sending humans back to the Moon or on to Mars, the poll shows.
To view the Chicago, Illinois-based AP-NORC Center for Public Affairs Research poll information, go to:
Space Exploration: Attitudes toward the U.S. Space Program
http://www.apnorc.org/projects/Pages/Space-Exploration-Attitudes-toward-the-U-S–Space-Program.aspx
AP-NORC poll: Asteroid watch more urgent than Mars trip
https://www.apnews.com/4d952f9b4c684899960fe85d807434d6
Also, go to:
Asteroids headed for Earth? Poll shows Americans are ill-informed about space by Mark R. Whittington, Opinion Contributor
Curiosity Navcam Right B image acquired on Sol 2454, July 2, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now in Sol 2455, performing science duties.

Curiosity Navcam Right B photo taken on Sol 2454, July 2, 2019.
Credit: NASA/JPL-Caltech
Reports Melissa Rice, a planetary geologist at Western Washington University, Bellingham, Washington: “Curiosity is currently near the top of Harlaw Rise, having made a slight diversion from the southward drive through the clay-bearing unit to explore the nice exposures of rocks on this hill.”
A recent plan called for Curiosity to investigate two rock targets in front of the rover: “Perth” and “Aberdeen.”
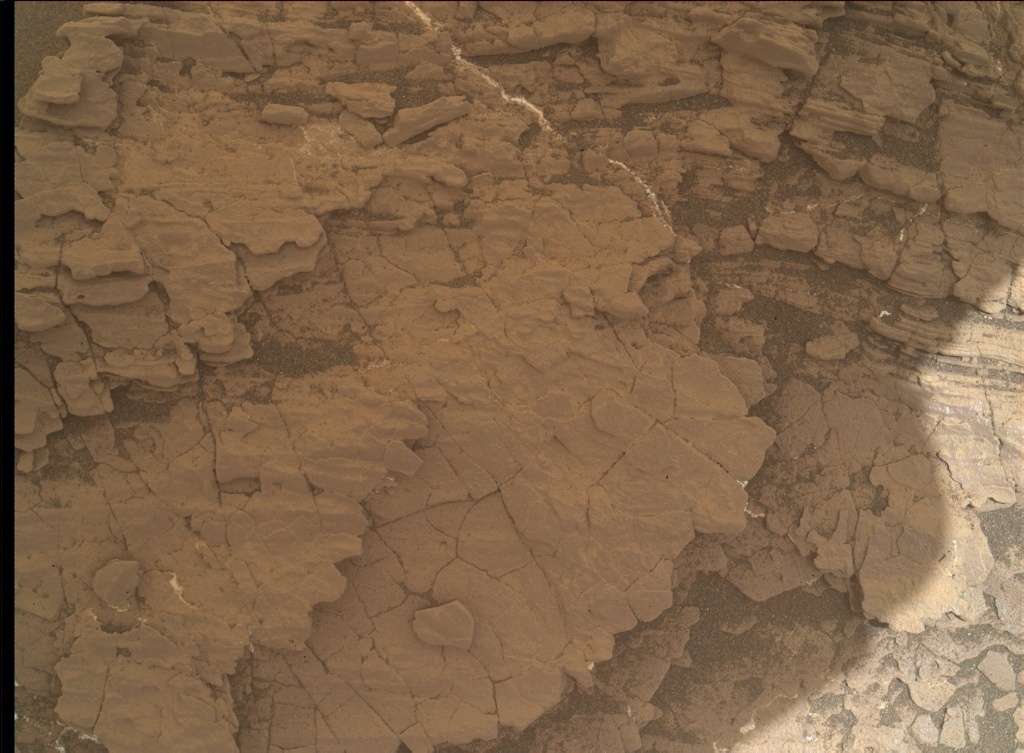
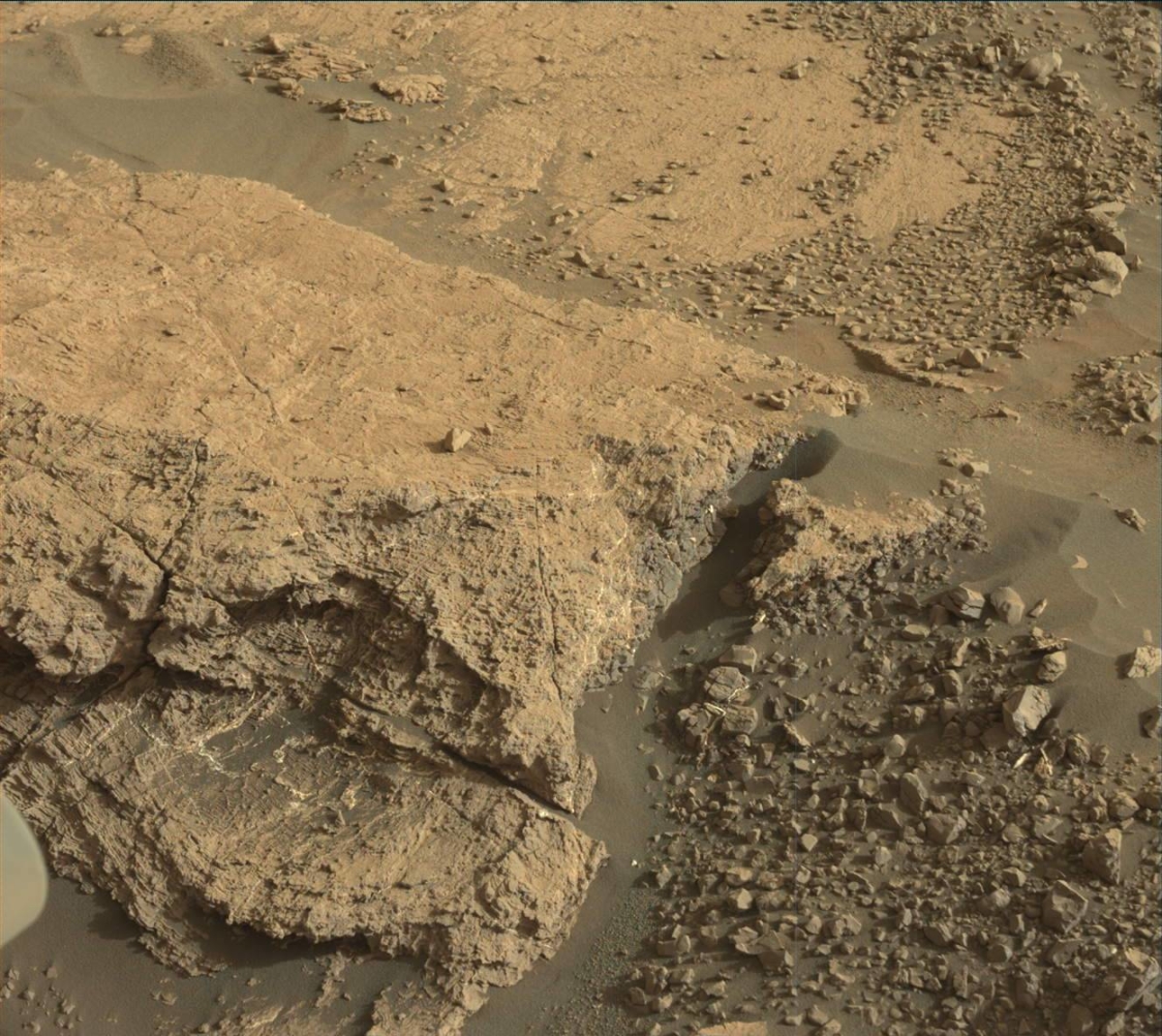
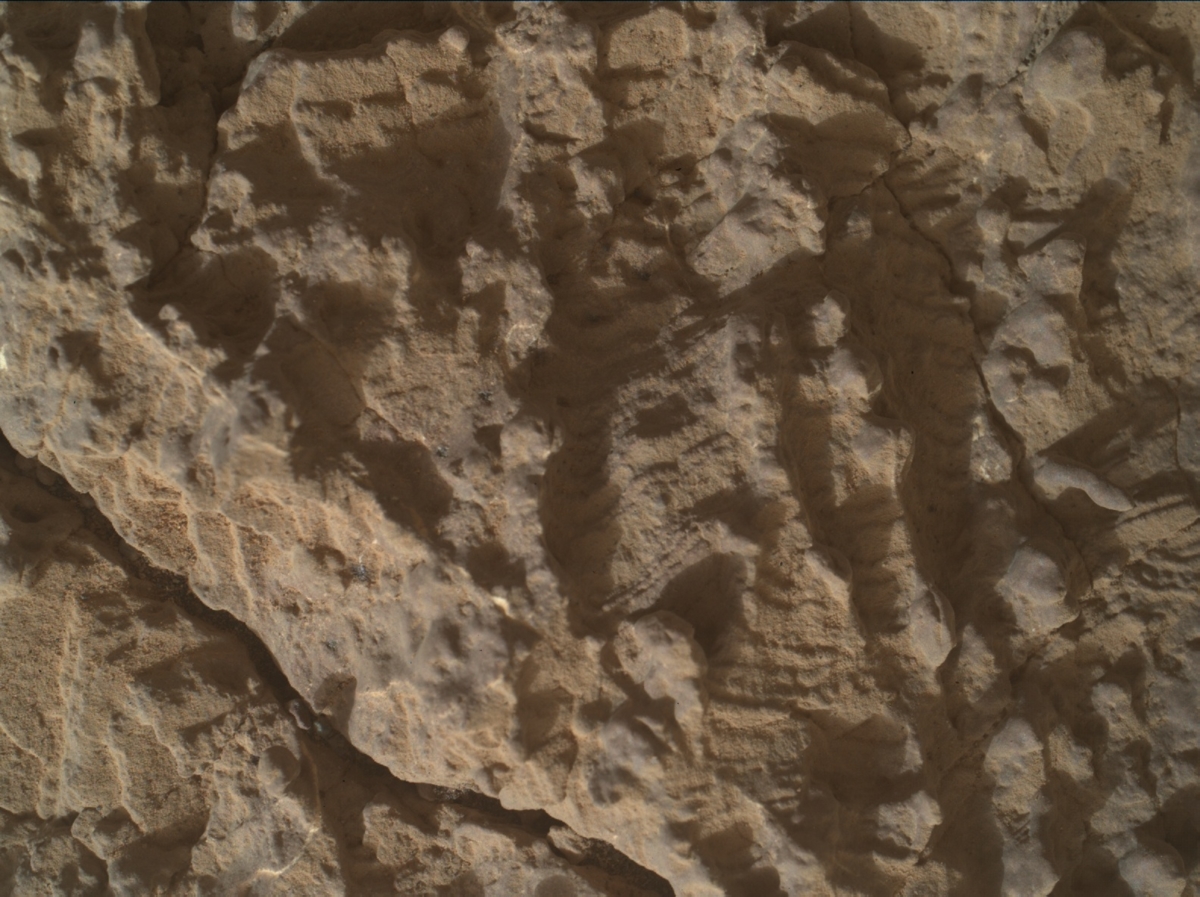
Curiosity Mars Hand Lens Imager (MAHLI) photo produced on Sol 2454, July 2, 2019.
Credit: NASA/JPL-Caltech/MSSS
Closer look
There is only enough time in this plan to put the arm on one of these two targets, Rice adds, so Perth will get a closer look with the Mars Hand Lens Imager (MAHLI) microscopic imager and Alpha Particle X-Ray Spectrometer (APXS) instrument, and “Aberdeen” will get shot by the Chemistry and Camera (ChemCam) laser.
“The Mastcam cameras will document both targets. After that, Curiosity will make a short drive further up the hill to a spot where both of these rock types might be better exposed,” Rice points out.

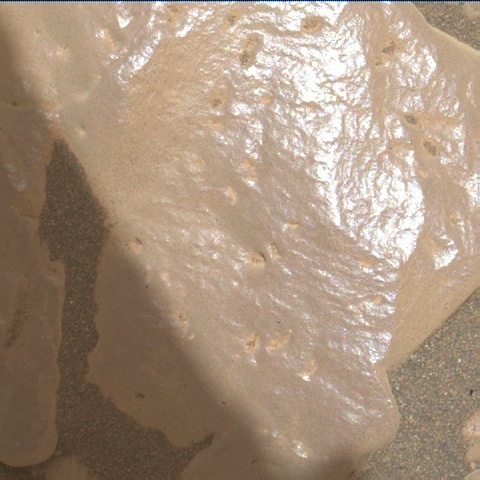
Curiosity Mastcam Left photo acquired on Sol 2453, July 1, 2019.
Credit: NASA/JPL-Caltech/MSSS
Name game
“Why do we give names like “Perth” and “Aberdeen” to Curiosity’s rock targets? How does the largest city in Western Australia end up right next to a Washington State timber town? As a Long-Term Planner for the Curiosity science team, one of my responsibilities is to keep track of the names that the team uses, and to make sure that they fit within the theme for this portion of the rover’s traverse,” Rice explains.
Curiosity is currently in a region of the team’s geologic map called the Torridon Quadrangle, named after a village in the Northwest Highlands of Scotland, Ricet adds, which is near an important geological formation called the Torridonian Supergroup.

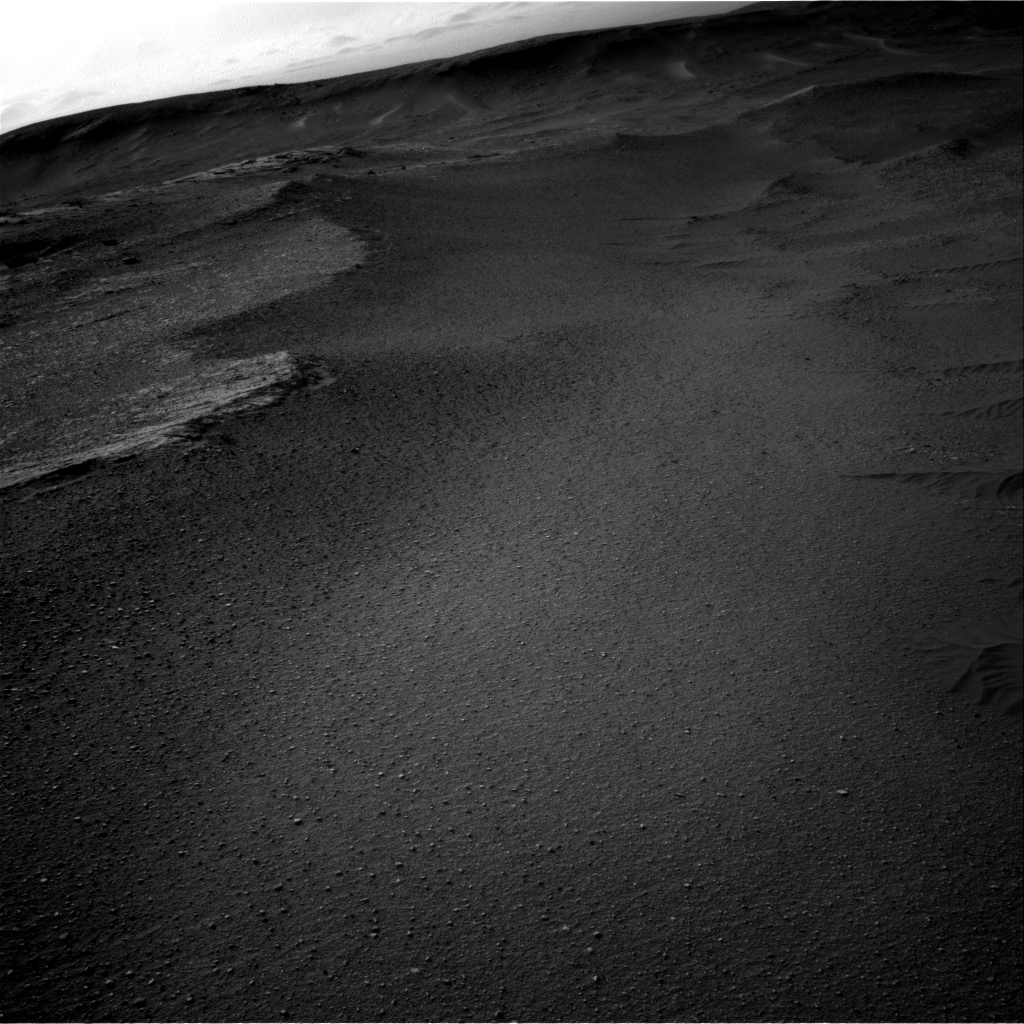
Curiosity Mastcam Left photo acquired on Sol 2453, July 1, 2019.
Credit: NASA/JPL-Caltech/MSSS
“Therefore, all of the names assigned to targets in this region of Curiosity’s traverse come from landforms, geologic formations, and towns in that part of Scotland. So the namesakes of today’s ‘Perth’ and ‘Aberdeen’ rock targets on Mars are the same as those of all the other Perths and Aberdeens out there: Perth, Scotland, and Aberdeen, Scotland,” Rice says.
Front Hazcam Left B image taken on Sol 2454, July 2, 2019.
Credit: NASA/JPL-Caltech

Presently, the military use of space is focused on geosynchronous Earth orbit inward, an arena of critical, multi-faceted spacecraft. Could cis-lunar space and the Moon itself become part of the military equation?
Credit: U.S. Air Force/Staff Sgt. Corey Hook
Worth a read:
The fact that the Defense Innovation Unit (DIU) is even considering the idea of a space station in orbit is a pretty big deal — and an even bigger deal if it grows over time to accommodate a human crew.
Story by Theresa Hitchens at Breaking Defense. Go to:
https://breakingdefense.com/2019/07/pentagon-eyes-military-space-station/
Orbital outpost
According to the DIU posting, this “Orbital Outpost” involves the Department of Defense (DoD) seeking solutions for a self-contained and free flying orbital outpost.

Credit: U.S. Air Force
The solution must be capable of supporting space assembly, microgravity experimentation, logistics and storage, manufacturing, training, test and evaluation, hosting payloads, and other functions. Prospective bidders are invited to submit their proposals (“Solution Brief”) per the guidelines below.
Minimum Desired Specifications
Internal volume: 1 m3
Payload capacity: 80 kg
Power (continuous): 1 kW
Communications: 100 kbps
Pressurization: 0 to 1 Atmosphere
Multi-phased
Solutions must be established in low Earth orbit within 24 months of award and have guidance, navigation and control for sustained free-flight operations. Favorable characteristics include modularity and scalability. This prototype effort does not include the cost of launch.
This effort will be multi-phased. The first phase will include engineering and design work. The subsequent phases will focus on the fabrication and test of the prototype, based upon the availability of FY20 funding.
Future capabilities
- Desired future capabilities (available as options for initial or future implementation) include:
- Common berthing mechanism
- In-space assembly using one or more robotic manipulators and interfaces accepting standard flight fixtures
- Temporary or permanent attachment to other similar modular outposts (manned or unmanned)
- Servicing or re-provisioning to extend flight operations for a longer duration
- Human-rating
- Orbit transfer
- Radiation hardening for beyond LEO applications
- Other unique features contributing to national security or defense.
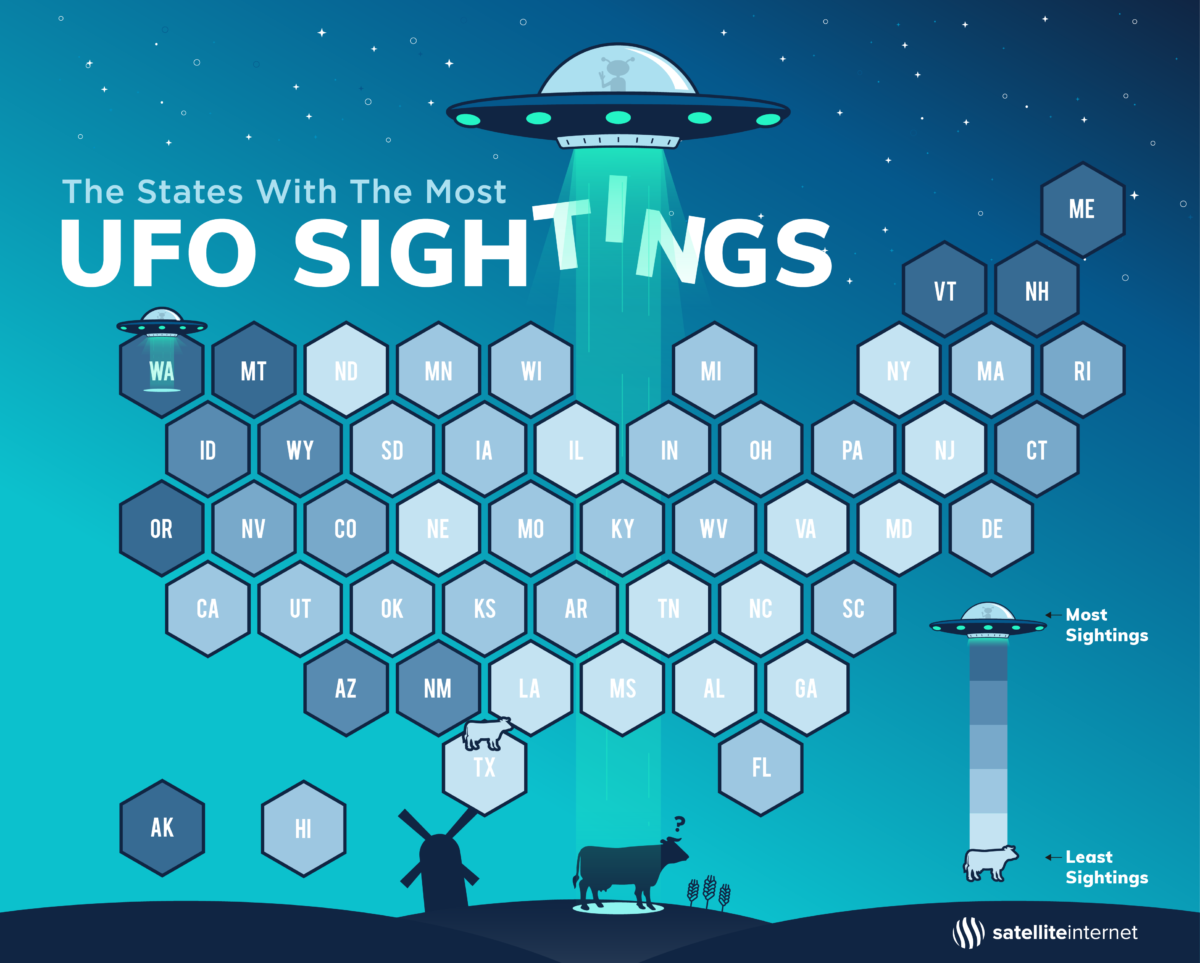
Credit: SatelliteInternet.com
In case you didn’t know – and time has flown by — July 2 is World UFO Day.
This year UFO supporters are in the spotlight thanks to a flood of UFO news, including: UFO incident reports from Navy pilots and former Pentagon intelligence officers and the release of classified UFO research from the NSA (National Security Agency).
All of this activity means that for the first time in years, UFO reports are being taken seriously by the media.

Credit: SatelliteInternet.com
State by state
Analysts at SatelliteInternet.com used data from the National UFO Reporting Center and the US Census to identify where you might have a higher likelihood of spotting a UFO in the US.

Credit: SatelliteInternet.com
“We used data from the National UFO Reporting Center’s online database to get the number of UFO sightings in each state,” reports Kristin Cooke of SatelliteInternet.com. “We then compared each state’s total number of sightings to US census data to find which states have the most UFO sightings per capita.”
For the full report, go to:
https://www.satelliteinternet.com/resources/states-with-the-most-ufo-sightings/
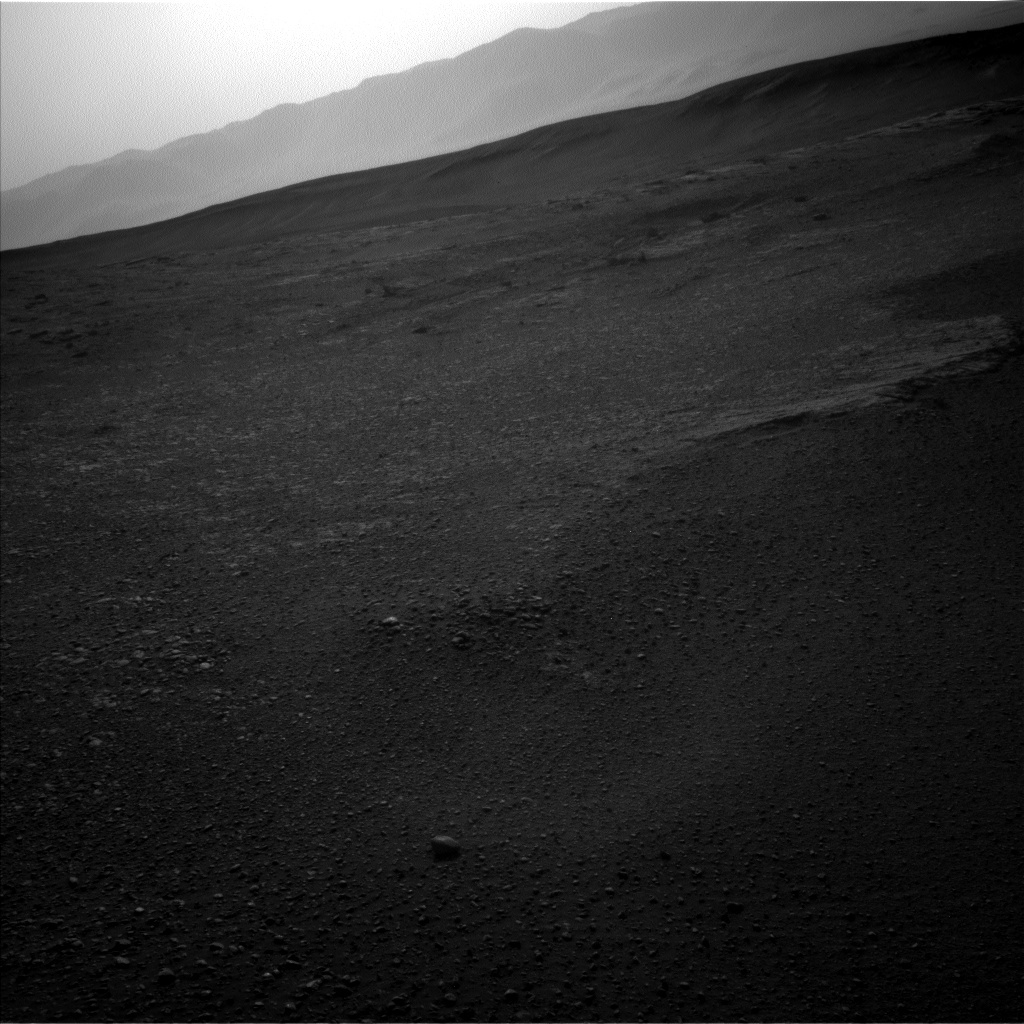
Image shows the rim of the crater once again visible above Vera Rubin Ridge. Photo taken by Navcam Left B on Sol 2449 June 27, 2019
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2451 weekend tasks.
Reports Roger Wiens, a geochemist at Los Alamos National Laboratory in Los Alamos, New Mexico: “Curiosity has been a bit down lately-in elevation. After exploring the top of Vera Rubin Ridge (VRR) last year, the rover descended into a trough south of the ridge, dropping as much as 15 meters in elevation this spring to explore part of the clay-bearing unit.”
Wiens adds that Curiosity is now back to the highest elevation that it achieved before it left the ridge, about -4140 meters relative to the reference level representing zero elevation on Mars.

Curiosity Navcam Right B photo taken on Sol 2450, June 28, 2019.
Credit: NASA/JPL-Caltech
Climb higher
“Curiosity will continue to climb higher as it explores the rest of the Glen Torridon and then moves on to the sulfate unit and Greenheugh Pediment,” Wiens notes.
The rover team recently planned activities for the rover over the weekend.
Curiosity is wrapping up activities at the base of “Harlaw Rise” and will then drive further up the rise.
Curiosity Mastcam Left photo acquired on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech/MSSS
Weekend plan
On the first sol of the weekend plan the rover is on tap to mostly nap to recharge batteries.
Some Hazcam imaging will be done and Mastcam will take some nighttime images, according to the plan.
On the second sol, ChemCam is slated to shoot three targets near the rover: “Red_Point”, “North_Sea,” and “Roineva.”
Crater rim imaging
Mastcam is slated to take a crater rim extinction image. The arm will be deployed for imaging of gnarly rocks with the Mars Hand Lens Imager (MAHLI) and analysis with the Alpha Particle X-Ray Spectrometer (APXS).
Target names are “Earn” and “Magnus Bay.”
On the plan, Navcam will take zenith and superhorizon movies, and Mastcam will take another crater rim extinction image. Mastcam will image “Harlaw_Rise” and the “Tayside” and “Buckie” targets.
Curiosity MAHLI image produced on Sol 2450, June 28, 2019.
Credit: NASA/JPL-Caltech/MSSS
Drive ahead
After that, Wiens concludes, the plan for the rover is to do some deck monitoring; Navcam will do a 360 degree dust devil survey. The rover will drive 115 feet (35 meters) which should take it up “Harlaw Rise.”
As always, dates of planned rover activities are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Curiosity Navcam Left B image acquired on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech
NASA’s Curiosity Mars rover is now performing Sol 2450 science duties.
“We are continuing our exploration of Glen Torridon (the clay-bearing unit) and the varied lithologies exposed in this area of Gale crater, including more rubbly bedrock that is mixed with sand, and more coherent bedrock exposed both in the ground and capping prominent ridges,” reports Lucy Thompson, a planetary geologist at the University of New Brunswick, Fredericton, New Brunswick, Canada.

Curiosity Navcam Right B photo taken on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech
Curiosity has continued the drive away from one of these ridges, Teal Ridge, towards another low-lying lip and ridge of exposed bedrock that Mars researchers refer to as “Harlaw.”

Curiosity Front Hazcam Left B image taken on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech
Perfect position
A recent drive by the robot put the Mars machinery about 30 feet (9 meters) away from Harlaw and in a “perfect position” to get some context Mastcam mosaics of the area that will help scientists interpret the results of our planned closeup investigation of this area, Thompson notes.
Curiosity Mars Hand Lens Imager (MAHLI) photo acquired on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech/MSSS
Before a planned drive towards Harlaw, “we will examine the rubbly ground immediately in front of the rover,” Thompson adds, using the Alpha Particle X-Ray Spectrometer (APXS), the Mars Hand Lens Imager, Chemistry and Camera (ChemCam) and rover’s Mastcam.

Curiosity Navcam Left B image taken on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech
Rubbly bedrock
“We will get a short morning APXS integration, closeup MAHLI images and ChemCam on a target “Tolsta,” ChemCam only on a target ‘Yell Sound’ and accompanying Mastcam imaging of the workspace to continue monitoring the composition and texture of the rubbly bedrock as we traverse the Glen Torridon region,” Thompson reports.
Curiosity Navcam Right B photo taken on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech
Environmental observations by Curiosity included standard background Rover Environmental Monitoring Station (REMS) activities to monitor the daily martian weather, the Radiation Assessment Detector (RAD) to monitor the radiation environment and Dynamic Albedo of Neutrons (DAN) passive to study the abundance and distribution of subsurface hydrogen- and water-bearing materials.
Curiosity ChemCam Remote Micro-Imager photo taken on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech/LANL
Optical depth
A Navcam dust devil survey and suprahorizon movie are also planned. The suprahorizon movie will look for clouds and the optical depth of the atmosphere.
As well as monitoring activities, as the APXS strategic planner for this week, Thompson helped select the Tolsta target and prepared a weekly instrument update for the science team.

Curiosity Navcam Right B photo acquired on Sol 2449, June 27, 2019.
Credit: NASA/JPL-Caltech
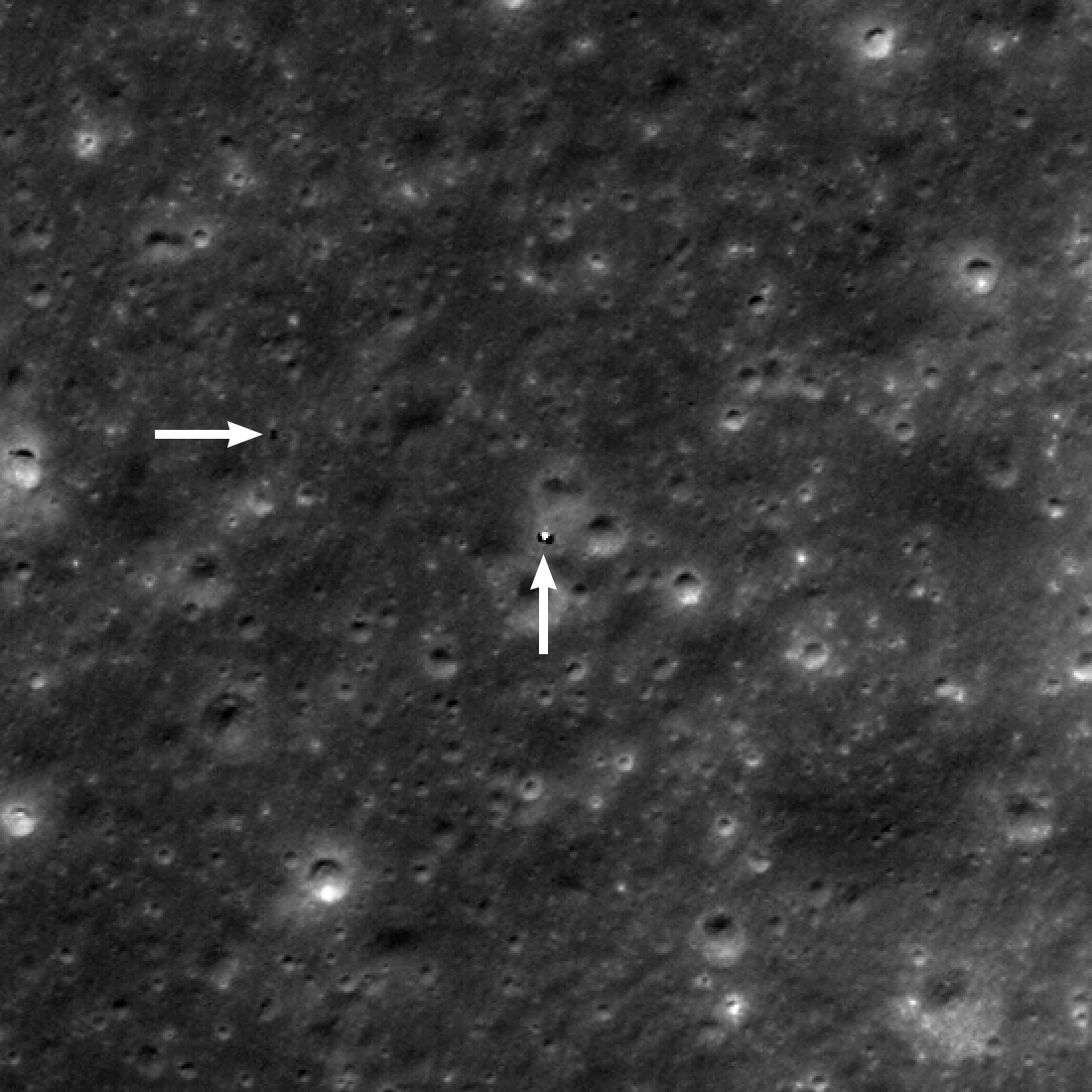
Yutu-2 (horizontal arrow) was about 130 meters west of the Chang’e 4 lander (vertical arrow) on June 3, 2019.
Credit: NASA/GSFC/Arizona State University
NASA’s Lunar Reconnaissance Orbiter (LRO) has snapped new imagery of China’s Yutu-2 rover that is still on the move!
The orbiter’s Lunar Reconnaissance Orbiter Camera (LROC) shows the wheeled rover about 426 feet (130 meters) west of the Chang’e-4 lander.
Once a month, LRO passes over the Chang’e 4 landing site, allowing LROC to capture a new image. LROC has now imaged the site five times (since the landing) on January 3 and observed Yutu-2 to have traveled a total of 610 feet (186 meters) – the distance measured using the rover tracks.

Credit: CNSA/CLEP
Slower progress
“Progress over the past two months has been slower than in previous months,” reports Mark Robinson, the LROC principal investigator at Arizona State University. “Perhaps the rover has found some interesting geology and is lingering to collect a comprehensive set of measurements!”
LROC will keep imaging the site as the Sun angles and look angles vary, to better understand the reflectance of this region, Robinson said, “and to watch Yutu-2 keep on roving and exploring!”
For full details on LROC’s recent imagery of China’s lander/rover mission on the Moon’s farside, go to:

